


Система искусственного интеллекта для идентификации объектов в загроможденных сценах
Роботизированное зрение прошло долгий путь, достигнув уровня сложности с применением в сложных и ответственных задачах, таких как автономное вождение и манипулирование объектами. Тем не менее, он по-прежнему с трудом идентифицирует отдельные объекты в загроможденных сценах, где одни объекты частично или полностью скрыты за другими. Как правило, при работе с такими сценами роботизированные системы технического зрения обучаются идентифицировать закрытый объект только по его видимым частям. Но такое обучение требует больших наборов данных объектов и может быть утомительным.
Доцент Кёбин Ли и доктор философии. Студент Seunghyeok Вернувшись из Института науки и технологий Кванджу в Южной Корее, столкнулся с этой проблемой, когда разрабатывал систему искусственного интеллекта для идентификации и сортировки объектов в загроможденных сценах. «Мы ожидаем, что робот будет распознавать и манипулировать объектами, с которыми он раньше не сталкивался или не был обучен распознавать. В действительности, однако, нам нужно вручную собирать и маркировать данные одну за другой, поскольку обобщаемость глубоких нейронных сетей сильно зависит от качества и количества набора обучающих данных», — сказал Бэк.
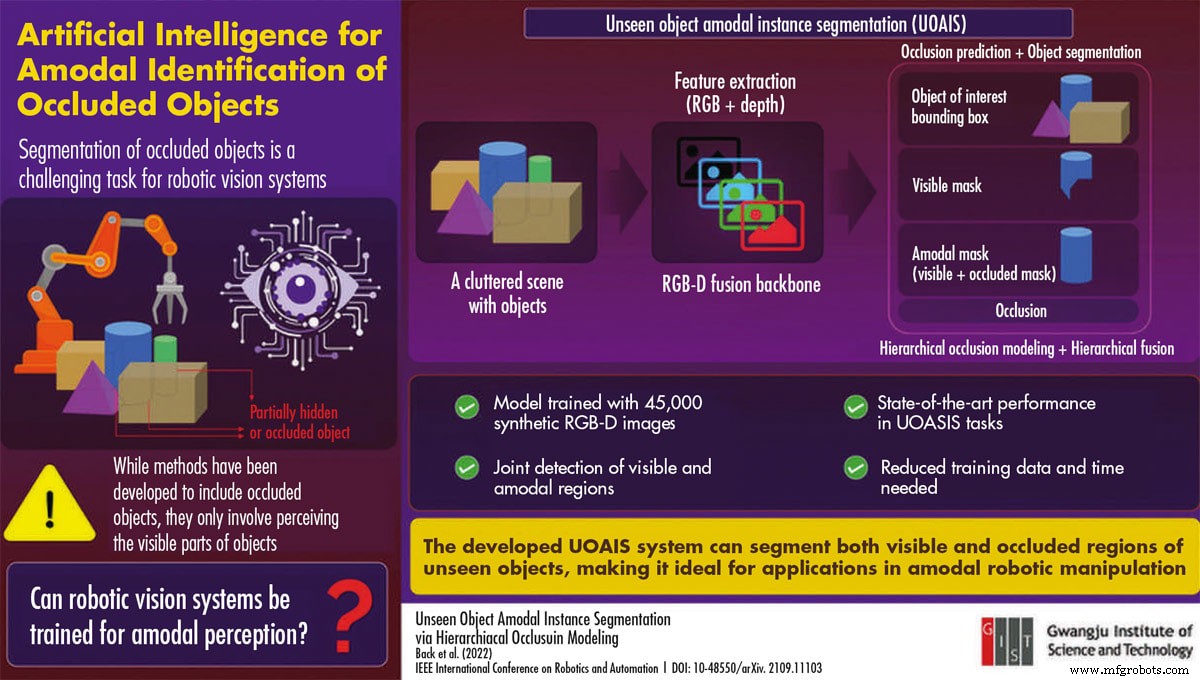
В новом исследовании под руководством профессора Ли и Бэка они разработали модель под названием «сегментация амодальных экземпляров невидимых объектов» (UOAIS) для обнаружения закрытых объектов в загроможденных сценах. Чтобы научить модель распознавать геометрию объекта, они разработали базу данных, содержащую 45 000 фотореалистичных синтетических изображений, содержащих информацию о глубине. С этими (ограниченными) обучающими данными модель смогла обнаружить множество закрытых объектов. Обнаружив загроможденную сцену, он сначала выбирает интересующий объект, а затем определяет, закрыт ли объект, сегментируя объект на «видимую маску» и «амодальную маску».
Исследователи были взволнованы результатами. «Предыдущие методы ограничивались либо обнаружением только определенных типов объектов, либо обнаружением только видимых областей без явного анализа закрытых областей. Напротив, наш метод может определить скрытые области закрытых объектов, как система человеческого зрения. Это позволяет сократить усилия по сбору данных и повысить производительность в сложной среде», — сказал Бэк.
Чтобы включить «обоснование окклюзии» в своей системе, исследователи представили схему «иерархического моделирования окклюзии» (HOM), которая присваивала иерархию комбинации нескольких извлеченных функций и их порядка прогнозирования. Проверив свою модель по трем эталонным параметрам, они подтвердили эффективность схемы HOM, которая обеспечила высочайшую производительность.
Исследователи надеются на будущие перспективы своего метода. «Восприятие невидимых объектов в загроможденной среде имеет важное значение для амодальных роботизированных манипуляций. Наш метод UOAIS может послужить основой для этого», — сказал Бэк.
Для получения дополнительной информации свяжитесь с Сыльхе Ким, Институт науки и технологий Кванджу, по адресу Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.; 82-627-156-253.
Система управления автоматикой
- Bosch добавляет искусственный интеллект в Индустрию 4.0
- Искусственный интеллект - вымысел или вымысел?
- Искусственный интеллект получает огромный импульс Kubernetes
- Искусственный интеллект помогает роботу распознавать объекты на ощупь
- Эволюция автоматизации тестирования с помощью искусственного интеллекта
- Как автоматизация и искусственный интеллект могут повысить кибербезопасность
- Использование искусственного интеллекта для отслеживания обезлесения
- Роботы с искусственным интеллектом
- Искусственный интеллект — это не приложение; Это методология
- Преимущества и недостатки искусственного интеллекта