


11 самых полезных основ программирования роботов
Какие основные свойства полезно знать, когда вы начинаете программировать роботов?
Если вы новичок в мире робототехники или просто хотите улучшить свои навыки программирования, вот основные основы программирования роботов, которые полезно знать.
Иногда может показаться, что вам нужна степень в области робототехники, чтобы начать программировать роботов. Традиционные подходы к программированию промышленных роботов кажутся трудными для понимания начинающими программистами робототехники.
Однако, обладая приличным знанием основ робототехники и хорошим программным обеспечением для программирования роботов, вы сможете легко и быстро приступить к работе.
Вот 11 наиболее полезных основ программирования роботов:
1. Основные части робота
Прежде чем вы начнете учиться программировать робота, полезно получить представление об основных частях любого промышленного робота. Таким образом, вы, по крайней мере, будете чувствовать себя комфортно с физической машиной, которую будете программировать.
Например, основные части промышленного робота с 6 степенями свободы:
- Рука манипулятора
- Конечный эффектор
- Контроллер
- Источник питания
- Датчики (если есть)
Компоненты могут незначительно отличаться в зависимости от типа робота.
2. Степени свободы
Я уже представил жизненно важную концепцию робототехники:Степени свободы (DoF).
DoF робота определяет, сколько независимых осей робот может перемещать. Например, рука манипулятора с 6 степенями свободы будет иметь 6 независимо управляемых осей. Некоторые степени свободы являются «револьверными» (т. е. вращаются вокруг точки), а некоторые «линейными» (т. е. движутся вдоль линии). Перед программированием полезно ознакомиться с глубиной резкости любого робота.
3. Суставы и концевые эффекторы
«Деловая часть» робота (т. е. часть, выполняющая задачу) известна как «конечный эффектор». Когда вы программируете, вы обычно заинтересованы в том, чтобы направить концевой эффектор робота в определенное место.
Чтобы переместить робота, вам нужно отправить инструкции с желаемыми позициями каждой из DoF робота. Если вы используете такое программное обеспечение, как RoboDK, вместо этого вы можете просто запрограммировать нужное положение конечного эффектора напрямую, а не отправлять конкретные положения суставов.
4. Поза:положение и ориентация
Как запрограммировать конечный эффектор, чтобы он сообщал ему, куда идти?
Положение и ориентация конечного эффектора робота (или любого другого места, которое вы запрограммируете) объединяются, чтобы сформировать «позу». Вам нужно указать позу любого места, куда робот будет двигаться в вашей программе. Самый распространенный метод указания позы в программировании — это углы Эйлера.
Дополнительную информацию см. в нашей статье «Углы робота Эйлера:основной учебник».
5. Центральная точка инструмента (TCP)
Поскольку при программировании робота нас больше всего интересует положение конечного эффектора, мы часто используем термин «центральная точка инструмента» для обозначения рабочего центра инструмента.
Вот несколько примеров для различных концевых эффекторов:
- Клей-пистолет — Вы можете настроить TCP так, чтобы он был на острие пистолета.
- Захват — TCP может находиться в центре пальцев захвата.
- Сварочный пистолет — TCP может находиться в нескольких миллиметрах от кончика пистолета, где пламя наиболее горячее.
Как программист, вы выбираете, где наиболее целесообразно разместить TCP робота.
6. Кинематика
Одним из наиболее сложных аспектов робототехники является кинематика. Это просто означает геометрическое расположение робота. Кинематика представлена в виде довольно большого уравнения или алгоритма.
Уравнение прямой кинематики отвечает на вопрос «Если я установлю суставы робота в определенное положение, где в конечном итоге окажется TCP?»
Алгоритм инверсной кинематики отвечает на противоположный вопрос «Если я хочу, чтобы ЦТИ остановилась в этой позе, в какое положение мне нужно установить суставы?»
С хорошим программным обеспечением для программирования роботов вам, вероятно, не нужно формулировать собственную кинематику, но может быть полезно понять основную концепцию.
7. Совместные ограничения
Кинематические уравнения описывают робота с помощью чистой геометрии и математики. Однако роботы — это физические машины. Физический робот часто не может достичь всех положений, которые ему позволяет геометрия.
Мы вводим ограничения на суставы в программирование, чтобы ограничить движение суставов робота только физически возможными положениями. Они просто сообщают программе "Этот сустав не может двигаться дальше этого определенного угла".
8. Типы перемещения
Когда вы программируете робота, вы можете заставить его выполнять различные типы движений.
Основные 3 движения:
- Совместный переезд — Это быстрое, грубое движение, при котором каждый сустав пытается как можно быстрее занять свое целевое положение. Во избежание столкновений совместные движения следует программировать только тогда, когда робот движется в свободном пространстве.
- Линейное перемещение — Это контролируемое движение вдоль линии между двумя позами. Робот обязательно будет двигаться медленнее при прямолинейном движении, но также не будет создавать бесполезных столкновений.
- Круговое перемещение — Подобно линейному движению, робот движется по контролируемой линии, на этот раз по круговой траектории.
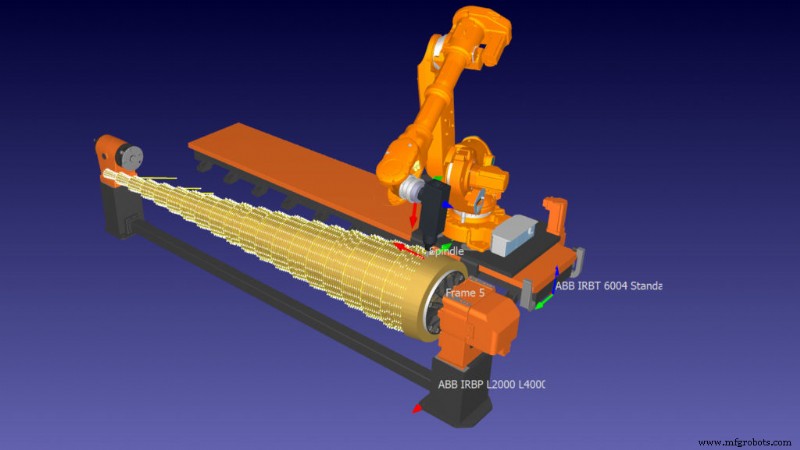
9. Моделирование и автономное программирование
Есть много разных способов запрограммировать робота, в том числе «запачкать руки» с помощью (обычно сложного) языка программирования, предоставляемого производителем робота.
Моделирование и автономное программирование предлагают более простой метод программирования. Вместо прямого программирования физического робота вы программируете смоделированную модель робота, используя интуитивно понятные команды. Затем программное обеспечение преобразует программу в код, понятный физическому роботу.
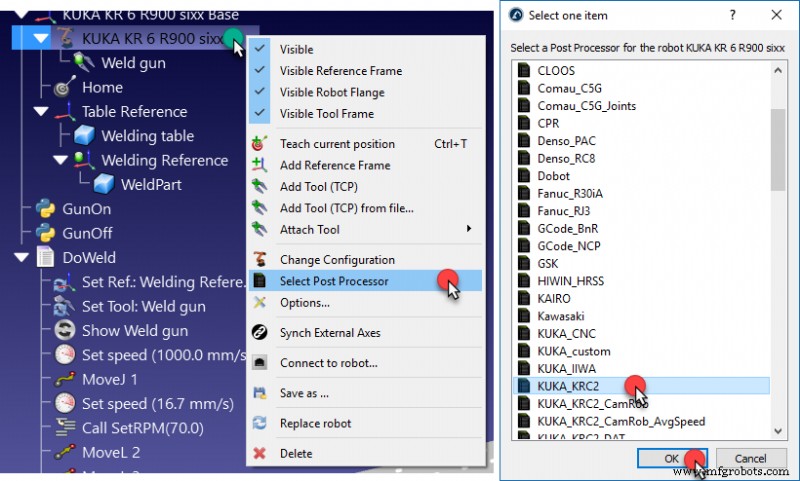
10. Постпроцессоры
Часть автономного программного обеспечения для программирования, которая преобразует программу робота, называется постпроцессором. Программное обеспечение для программирования будет иметь разные постпроцессоры для каждого производителя роботов, а иногда и более одного.
Вы можете узнать больше о постпроцессорах в нашей статье Роботизированные постпроцессоры:все, что вам нужно знать.
11. Отладка
Какой бы метод программирования вы ни использовали, жизненно важным базовым навыком является отладка. Вы всегда должны отлаживать свою программу, чтобы убедиться, что она работает так, как вы задумали, прежде чем запускать робота в производственной среде.
Автономное программирование предоставляет вам дополнительный этап отладки, поскольку вы программируете смоделированную модель робота до того, как загрузите программу в самого физического робота, что снижает вероятность ошибок.
Если вы хотите сразу приступить к программированию роботов, вы можете скачать бесплатную пробную версию RoboDK здесь.
По каким основным аспектам программирования роботов вам нужна помощь? Сообщите нам в комментариях ниже или присоединитесь к обсуждению в LinkedIn, Twitter, Facebook, Instagram или на форуме RoboDK.
Промышленный робот
- Преимущества удаленного мониторинга, удаленного программирования и профилактического обслуживания
- Шарнирно-сочлененные роботы:руководство по самому знакомому промышленному роботу
- Декартовы роботы:руководство по самой масштабируемой робототехнике
- Роботы SCARA:руководство по самому универсальному и востребованному роботу
- Комментарий:понимание методов программирования роботов
- Что такое нить ТПУ? Основы и полезное руководство.
- Когда самое подходящее время для инвестиций в инструменты программирования роботов?
- Программирование промышленных роботов для начинающих
- Выбор подходящего программного обеспечения для роботов
- Робот для нанесения покрытий Fanuc:P-250iA