


Как запрограммировать робота-конвейера, не сойдя с ума
Программирование робота-конвейера сложнее, чем многие думают. Хорошее моделирование — ключ к успеху, но как сделать это, не сойдя с ума?
Конвейерные ленты — это простой способ перемещать продукты к вашему роботу, верно?
Ну не совсем. Мы часто думаем о конвейерах как о простом решении, но на самом деле это один из самых сложных способов доставки заготовок. Они требуют, чтобы робот обнаруживал и отслеживал объекты, движущиеся по конвейеру. Им нужно управлять через программу робота. Они также страдают от различных механических проблем в течение всего срока службы, таких как плохое отслеживание, износ ремня и проскальзывание. Все это означает, что конвейеры могут свести вас с ума.
Вместо того, чтобы быть простыми, они могут быть сложными в использовании.
Мы не можем решить механические проблемы ваших конвейеров — для этого вам нужен хороший график обслуживания, подобный тому, который показан в этом удобном контрольном списке от Cisco-Eagle. Однако мы можем поможет вам легко смоделировать конвейер, чтобы вы могли протестировать его и интегрировать в программирование вашего робота.
Вот как запрограммировать робота-конвейера, не сойдя с ума.
5 сложных движущихся частей робота-конвейера
Во-первых, важно понять, в чем сложность программирования конвейера.
Есть 5 «движущихся частей», которые затрудняют интеграцию программирования роботов с конвейерами.
1. Управление самим конвейером
Может показаться, что управление конвейером — это просто сделка «вкл./выкл.», но обычно все немного сложнее. Конвейеры имеют различные варианты управления, в зависимости от модели. Некоторые из них имеют фиксированную скорость, в то время как другие могут управляться с переменной скоростью. Некоторые имеют реверсивный режим, активное торможение или быстрое переключение. Кроме того, существуют различные методы управления, три из которых наиболее распространены:импульсное управление, управление скоростью и распределенное управление.

Возможно, вам придется управлять конвейером внутри самой программы робота. В противном случае вам, возможно, придется взаимодействовать с конвейером через сеть. Обе эти опции усложняют программирование.
2. Отслеживание и обнаружение объектов
Для того, чтобы поднимать предметы с движущегося конвейера, робот должен быть в состоянии надежно определить их местонахождение. Это означает, что вам нужен какой-то датчик, чтобы определить, когда объект появляется перед роботом. Более того, роботу может понадобиться какой-то способ отслеживать объекты во время движения конвейера.
Наиболее распространенными датчиками для этого являются датчики зрения (например, 2D- или 3D-камеры) и датчики обнаружения деталей (например, световые лучи, магнитные датчики, индуктивные датчики и т. д.). Некоторые интегрировать проще, чем другие, но все они усложняют вашу программу.
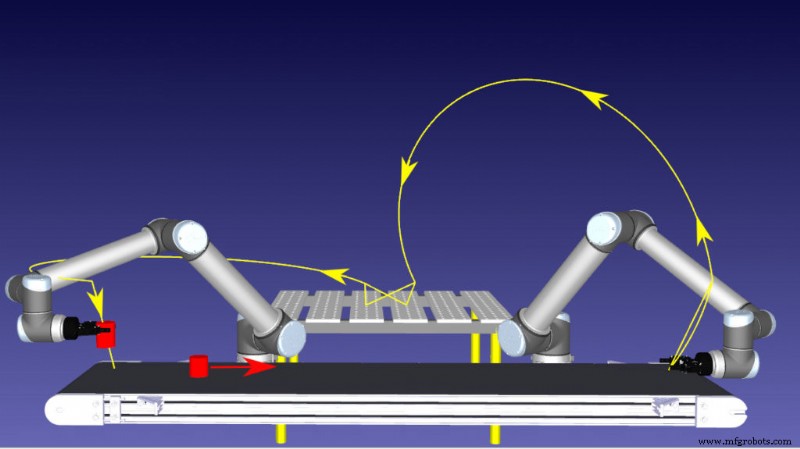
3. Работа с движущимися объектами
С движущейся целью всегда труднее справиться, чем со статической. Это усложняет захват с конвейерной ленты. Робот должен иметь возможность занять нужное положение, прочно ухватиться за объект и уйти, в то время как новые объекты продолжают прибывать.
Скорость конвейера должна быть точно настроена на скорость робота, иначе объекты могут быть пропущены. Если вы видели знаменитую «шоколадную сцену» из комедии 1950-х годов «Я люблю Люси», вы поймете, о чем я (и вот она, если вы ее еще не видели).
4. Выбор эффектора завершения
Рука робота — не единственная часть системы, которая должна поддерживать скорость. Концевой эффектор может существенно влиять на время цикла и, следовательно, на скорость конвейера. Некоторые типы конечных эффекторов работают быстрее, чем другие.
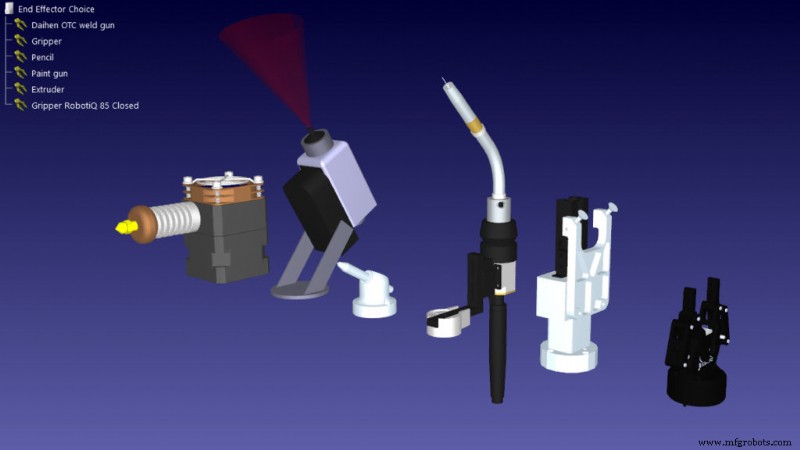
Это означает, что теперь мы должны контролировать и координировать 3 независимые скорости одновременно:скорость конвейера, скорость манипулятора робота и скорость захвата концевого эффектора.
5. Использование приспособлений
Последняя движущаяся часть, на самом деле, вообще не движущаяся часть. Крепления представляют собой статические механические детали, которые крепятся к конвейеру для перемещения объектов в нужное положение. Это надежный способ упорядочить объекты на конвейере без использования датчиков.
Например, вы можете использовать приспособление в качестве альтернативы использованию датчика технического зрения. Благодаря листовому металлу специальной формы вы можете направлять объекты в статическую очередь, позволяя роботу поднимать их без дополнительных датчиков. Они упрощают программирование, но усложняют механическую конструкцию.
Как смоделировать конвейер с помощью RoboDK
Вы можете преодолеть пять вышеуказанных проблем, смоделировав свою роботизированную систему и тщательно протестировав ее, прежде чем использовать физическую систему. Это не всегда просто с симуляторами роботов, многие из которых не имеют простой возможности добавления конвейеров.
К счастью, конвейеры в RoboDK довольно просты. Есть даже два варианта их добавления, в зависимости от того, какой уровень контроля вам нужен.
Два типа конвейера в RoboDK:
Вариант 1. Программирование на Python
Самый гибкий способ создания конвейера в RoboDK — это программирование его на Python. Вы можете увидеть это в действии в примере видео «Моделирование конвейера с помощью RoboDK».
Преимущества программирования на Python:
- Он очень гибкий. Движение конвейера ограничено только вашими навыками программирования. Вы можете запрограммировать смоделированный конвейер так, чтобы он соответствовал свойствам вашей реальной ленты.
- Его можно полностью настроить. Вы можете запрограммировать конвейер так, чтобы он двигался по вашему желанию. Вы полностью контролируете его движения и то, как он обращается с объектами.
- Это позволяет использовать более сложные конвейеры. Если ваш конвейер имеет расширенные режимы управления, их можно включить в код Python. Кроме того, если вы разместили приспособление для перемещения объектов, например, сбоку от ремня, это можно запрограммировать в коде.
Недостатки программирования на Python:
- Требуются навыки программирования . Вы должны уметь программировать на питоне. Это один из самых простых языков для изучения, но он по-прежнему требует обучения, если вы до сих пор использовали только графический интерфейс RoboDK.
- Это займет немного больше времени . По сравнению с вариантом линейного механизма, программирование на Python требует времени. Кроме того, чем сложнее конвейер, тем больше времени потребуется на его программирование.
Вариант 2. Линейный механизм
Другой вариант — создать линейный механизм с помощью мастера «Модель механизма». Это позволяет создать простой конвейер с одной линейной осью.
Преимущества линейного механизма:
- Это быстро. Вы можете создать линейный механизм за считанные минуты и очень быстро добавить конвейер в симуляцию робота.
- Он использует графический мастер. Вы можете создать механизм с помощью мастера, используя только системы отсчета и цели.
- Это практически не требует программирования. Вам не нужно программировать на Python, чтобы создать конвейер. Однако имейте в виду, что вам, вероятно, придется программировать для обнаружения объектов на конвейере.
Недостатки линейного механизма:
- Ограничено. Простота механизма означает, что вы можете моделировать только конвейер с одной осью.
- Он негибкий. Этот параметр затрудняет моделирование более сложных параметров управления конвейером. Это также затрудняет обнаружение падения предметов с конвейера.
С чего начать
Какой вариант вы выберете, во многом зависит от того, чего вы хотите избежать при программировании на Python. Если у вас нет веских причин для выбора линейного механизма, мы обычно рекомендуем выбирать вариант Python. Он гораздо более гибкий и, как мне кажется (хотя я и программист), его легче понять и реализовать.
Какой бы вариант вы ни выбрали, вам не нужно создавать симуляцию конвейера с нуля.
Оба варианта доступны для загрузки в нашей библиотеке роботов. Просто выберите «Объект» в меню «Тип», и вы увидите две опции:«Модель Python» для опции python; и «Модель механизма» для варианта линейного механизма.
Если вы застряли, вы всегда можете оставить комментарий на форуме RoboDK, и мы сделаем все возможное, чтобы помочь вам.
Промышленный робот
- Как роботы-распылители улучшают согласованность
- Как роботы-рисовальщики сокращают количество доработок
- Как робот достигает полной автономии?
- Сумасшедшие конвейеры
- Технический документ:как определить потенциал своего робота
- Полное руководство:как выбрать правильный робот SCARA
- Уход за роботом-машиной:что это такое и как работает
- Как сократить время обучения роботизированной сварке
- Правильный способ моделирования робота-конвейера
- Как выбрать структуру конвейера