


Как робот достигает полной автономии?
Когда большинство людей думают о полностью автономных роботах, они беспокоятся о фантастических сценариях искусственного интеллекта, которые мало основаны на реальных фактах и тайнах, которые мы знаем о сознании. Зацикливаясь на этом, людям становится все труднее увидеть практическую ценность роботов, которые могут функционировать независимо и без существенного контроля, когда существует множество рабочих мест, процессов и отраслей, которым НЕОБХОДИМО гораздо больше помощи для повышения их прибыльности и положительного воздействия.
В то же время автономность робота стала жертвой некоторых неконтролируемых определений и ожиданий, которые не обязательно помогают понять, что нужно роботу, чтобы стать автономным, и где автономия может быть достигнута наиболее быстро.
Чтобы позволить роботу достичь полной автономии, необходимо выполнить несколько критериев:
- Робот должен иметь возможность самостоятельно получать значимую информацию об окружающей среде.
- Робот должен уметь обрабатывать эту информацию структурированным и удобным образом.
- Робот должен уметь планировать свои действия в ответ на эту информацию.
- Робот должен уметь своевременно выполнять составленный им план.
Во всех этих обстоятельствах важно понимать еще несколько вещей . с точки зрения структуры этих параметров:
- У робота должна быть цель. Хотя мы традиционно связываем человеческую автономию со способностью ставить собственные цели, не существует ожидаемого параметра, в пределах которого современные роботы станут самосознательными.
- Автономность робота должна зависеть от конкретного случая использования. Полностью автономный автомобиль может функционировать на разных уровнях - одни на шоссе, другие на любой местности. В зависимости от обстоятельств оба могут обладать одинаковой степенью автономии.
- Дизайн работает лучше всего, когда он сводит к минимуму потребность во вмешательстве человека - хотя некоторые автономные приложения-«коботы» могут помочь оптимизировать производительность или достичь желаемой цели, в большинстве случаев автономия не является адекватным критерием при непосредственном участии человека. требуется.
Итак, как нам добраться из точки А в точку Б? Как традиционный «программируемый» робот становится полностью автономным? Что ж, вот и начинается самое интересное!
Получение информации об окружающей среде
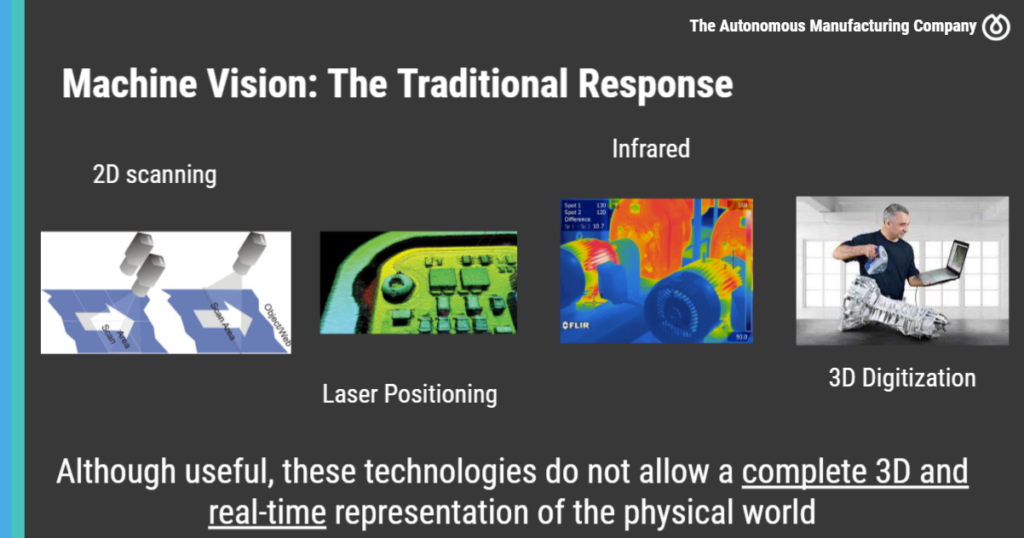
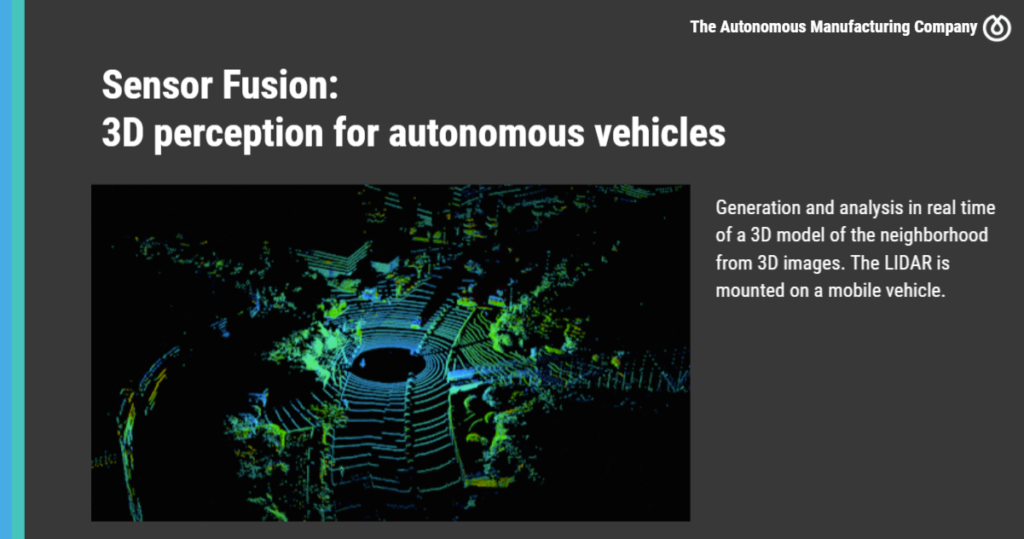
Существует множество решений, позволяющих сообщить роботу о том, что происходит вокруг него. Лидар, радар, гидролокатор, тактильные датчики, всевозможные системы видения, бесконечное количество различных механизмов связи, от экстра-роботизированных датчиков, камер или локальных информационных систем, которые могут быть аудио или видео по своей природе. Все это просто попытка дать роботам те же чувства, что и у человека, и уже давно стало стандартом в таких областях, как автоматическое управление машинами для узкоспециализированных процессов автоматизации.
Важно учитывать, что восприятие - не единственное ограничение здесь. Например, в промышленных системах, которые теперь поддерживают IoT (Интернет вещей) или, по крайней мере, объединены в сеть, различные контроллеры процессов и программируемые логические контроллеры могут быть соединены вместе в разные цепочки, используемые для выполнения разных процессов. Однако что можно сделать оттуда, так это фактически включить эту информацию в роботизированные процессы, чтобы понять положение, ориентацию и необходимые манипуляции с объектом.
Вне промышленных условий могут применяться те же модели, но они должны быть контекстуализированы с помощью правильных типов связанной информации. Например, если кто-то хочет создать робота для медицинского обслуживания или ухода за пожилыми людьми, возможности внешнего зондирования могут быть полезны для управления здоровьем пациента, но без надлежащей безопасности и анонимности они также могут создать риски для конфиденциальности или агентства, когда дело доходит до того, кто о чем заботятся и каким роботом, при каких обстоятельствах.
Точно так же 5G рассматривается как отличная возможность для координации между будущими беспилотными автомобилями и повышения эффективности автоматизации всех аспектов вождения и транспортировки, при этом оптимизируя такие вещи, как дорожные условия, узкие места, заблокированные дороги и многое другое. Несмотря на то, что это очень мощные приложения, необходимо аккуратно обращаться с тем, как информация транслируется в робота. В конце концов, с большой силой приходит и большая ответственность.
Структурированная обработка информации
Как можно эффективно переваривать информацию? Когда мы думаем о том, как мы поступаем так, как люди, это вторая натура или часто инстинктивная с точки зрения того, как мы принимаем решения. Чего мы часто не осознаем, так это того, что многие наши решения основаны на эволюционных, социальных или поведенческих чертах, а также на характеристиках нашей личности, из-за которых наш образ действий иногда кажется детерминированным, хотя и не без каких-либо сюрпризов или веселья!
Но когда дело касается роботов, мы не любим сюрпризов! Конечно, приятные сюрпризы - такие вещи, как обнаружение, что робот лучше или эффективнее, чем мы могли надеяться, - это здорово, но если это означает, что нам нужно предвидеть все возможные функции автономного робота - будь то доставка, транспортировка, оказание помощи , погрузочно-разгрузочные работы, осмотр, профилактическое обслуживание, производственные процессы или просто робот-собака, которая делает сальто назад - гораздо предпочтительнее управлять нашими ожиданиями, чем «отказ от работы».
В связи с этим важно понимать, что создание автономного робота редко означает, что что-то работает из коробки. В то время как некоторые компании и ученые работают над способами упрощения фундаментальных моделей восприятия и обработки автономных роботов, эти модели в конечном итоге должны способствовать моделям процессов, которые упрощают способность роботов использовать информацию действенным образом.
Планирование действий на основе данных
Данные, генерируемые сенсорными механизмами робота, можно переваривать различными способами. В конечном счете, для трехмерных визуальных данных самый простой способ - разбить и повторно интегрировать данные формы в единый объект. Это параллельный процесс, требующий накопления множества мелких операций - в то время как человеческий мозг функционирует таким образом очень гибко, создание надежных моделей для этого типа обработки требует значительного повторения и проверки.
Самый полезный аспект этого процесса - введение данных в общую модель процесса для любых действий робота. Что-нибудь поднять и унести? Бросить почту в почтовый ящик? Нарисовать или сварить что-нибудь вместе? Каждое из этих действий требует целостного понимания природы, местоположения, положения и несоответствующих результатов цели (например, почта попадает в ящик, но в дне есть дыра, и она падает в куст).
В то же время, чтобы расширить этот пример с почтой, необходимо установить резервные цели, чтобы достичь все еще приемлемого результата автоматическим способом без перенапряжения основных приоритетов автономной функции робота. Проще говоря:автономные роботы должны уметь импровизировать, но планирование такой импровизации требует много работы.
Как однажды сказал Марк Твен:«Обычно на подготовку хорошей импровизированной речи у меня уходит больше трех недель». Это не просто шутка, но на самом деле очень поучительно, как работают люди. Хотя мы часто можем быть сосредоточены на текущих задачах, у нас есть сложный набор подсознательных привычек с дополнительными талантами, такими как «проприорецепция», которые не очень хорошо осознаются.
Хотя это идеальные навыки для робота, которому нужно будет делать все:от качелей с деревьев до охоты в саванне и, возможно, изобрести колесо и немного подстрелить потом. На развитие этих возможностей потребовались миллионы лет, поэтому не удивляйтесь, что для автономной работы робота может потребоваться больше полудня.
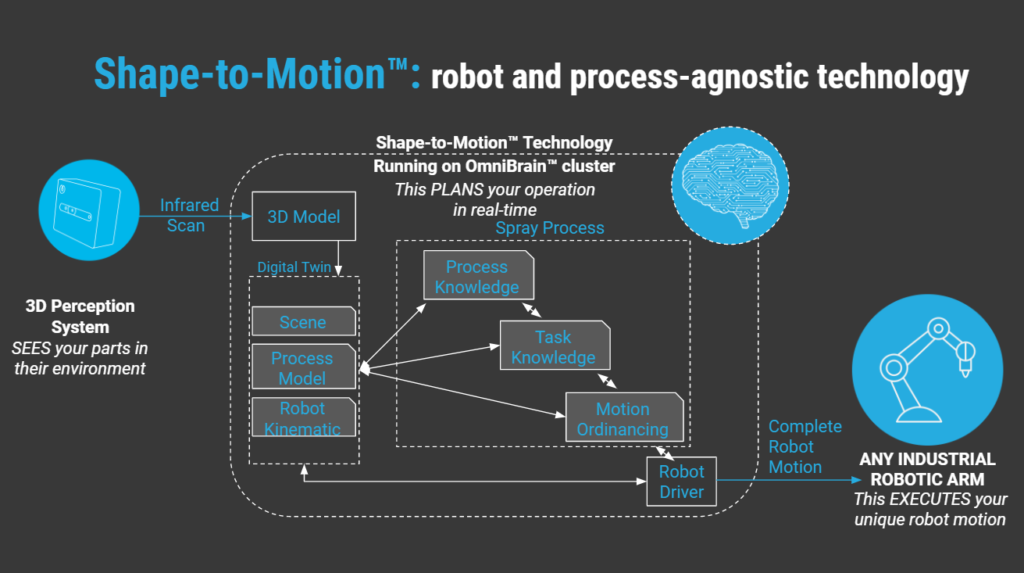
Итак, в этом контексте, каков ответ для роботов? Что ж, во многом так же, как люди визуализируют свои действия перед их выполнением, генерируя симуляции или цифровых двойников функции автономных роботов и используя это как для внедрения ожиданий модели процесса (например, где обычно находится почтовый ящик или как он выглядит), является самый важный шаг, который вы можете сделать для создания полезного автономного робота.
Выполнение плана
Если у вас есть модель процесса, достаточное количество симуляций и правильно откалиброванные сенсорные механизмы, выполнение становится просто вопросом наблюдения и оптимизации. Если автономный робот, который вы создаете, сразу после установки соответствует вашим стандартам, то даже этого не нужно делать. Фундаментальная ценность роботов - их постоянство, а существующие современные промышленные роботы чрезвычайно надежны. Добавление уровней восприятия и интеллекта, чтобы сделать их отзывчивыми к разным частям и позициям создает совершенно новый мир автономии, который мы все хотим исследовать
Что дальше с этой автономией? Упрощение способа создания приложений, как упомянуто выше, но также увеличение диапазона датчиков, устройств роботов, задач, сред и многого другого, которые могут быть выполнены. Глупо то, что автоматизация создает производительность, которая в конечном итоге увеличивает рост, доходы и спрос на рабочую силу. Рассмотрение автоматизации как угрозы для сотрудников - реальная угроза , обеспечивая автоматизацию большего количества пространств, которые не нравятся работникам сделает работу более креативной, инновационной и увлекательной, чем когда-либо прежде - если людям хотя бы нужно работать . Наслаждайтесь!

Omnirobotic предоставляет технологию автономной робототехники для процессов распыления, позволяющую промышленным роботам видеть детали, планировать свои собственные движения и выполнять важные промышленные процессы нанесения покрытий и отделки. Посмотрите, какую окупаемость вы получите здесь или узнайте больше о том, как вы можете извлечь из этого пользу автономные производственные системы .
Промышленный робот
- Как роботы-распылители улучшают согласованность
- Как роботы-рисовальщики сокращают количество доработок
- Технический документ:как определить потенциал своего робота
- Сколько стоит автоматизация роботов?
- Центр виртуальных решений:как моделирование роботов помогает интеграции роботов?
- Материалы для сборки робота:полный список
- Полное руководство:как выбрать правильный робот SCARA
- Уход за роботом-машиной:что это такое и как работает
- Как сократить время обучения роботизированной сварке
- Как начать программирование роботов Yaskawa