


Количественное наномеханическое картирование полиолефинового эластомера в наномасштабе с помощью атомно-силовой микроскопии
Аннотация
Обычно ожидается, что эластомерные наноструктуры будут выполнять явную механическую роль, и поэтому их механические свойства имеют решающее значение для влияния на характеристики материала. Их универсальное применение требует глубокого понимания механических свойств. В частности, механический отклик полиолефина низкой плотности (LDPE), зависящий от времени, полностью не выяснен. Здесь, используя современное количественное наномеханическое картирование PeakForce вместе с объемом силы и быстрым объемом силы, модули упругости образцов LDPE были оценены в зависимости от времени. В частности, частота сбора данных была дискретно изменена на четыре порядка от 0,1 до 2 кГц. Данные о силе были согласованы с линеаризованной моделью контактной механики DMT с учетом силы поверхностного сцепления. Увеличение модуля Юнга было обнаружено с увеличением частоты сбора данных. Оно составило 11,7 ± 5,2 МПа при 0,1 Гц и увеличилось до 89,6 ± 17,3 МПа при 2 кГц. Более того, эксперимент по податливости ползучести показал, что мгновенный модуль упругости E 1 , запаздывающий модуль упругости E 2 , вязкость η , время замедления τ составили 22,3 ± 3,5 МПа, 43,3 ± 4,8 МПа, 38,7 ± 5,6 МПа и 0,89 ± 0,22 с соответственно. Многопараметрическое, многофункциональное локальное зондирование механических измерений наряду с визуализацией исключительно высокого пространственного разрешения открывают новые возможности для количественного наномеханического картирования мягких полимеров и потенциально могут быть распространены на биологические системы.
Введение
С быстрым прогрессом передовых методов полимеризации растет интерес к морфологии полимеров и их механической оценке [1]. Один популярный класс полимеров - эластомеры. Обычно ожидается, что эластомерные наноструктуры будут выполнять явную механическую роль, и поэтому их механические свойства имеют решающее значение для влияния на характеристики материала. Обычно они проявляют пространственные и временные неоднородности в своих свойствах. Как их наноразмерная структура и свойства связаны с микрочастицами, которые в конечном итоге приводят к объемным свойствам, не совсем понятно [2,3,4,5,6,7,8]. Их универсальное применение требует глубокого понимания механических свойств. Полиолефиновые эластомеры (ПЭ) вызвали большой интерес в ряде исследовательских и промышленных областей, таких как высоковольтный кабель [9], нановолоконная мембрана [10], материалы многократного использования [11] и несмешивающиеся полимерные системы [12]. Он оказался эффективной и надежной модельной полимерной системой для наномеханических измерений [13, 14]. Несмотря на широкое применение, измерение модуля упругости полиэтилена низкой плотности (LDPE) остается сложной задачей по нескольким причинам [15]. Во-первых, они вязкоупругие, то есть их механические характеристики зависят от времени. Во-вторых, большие поверхностные силы усложняют процесс вдавливания. В-третьих, мало надежных моделей, точно описывающих механику контакта. Были проведены многочисленные исследования с использованием вдавливания для измерения механических свойств LDPE. Заметные успехи были достигнуты в понимании модуля LDPE. Например, сообщалось о том, как температура [16], линейный полиэтилен низкой плотности [17], нанопорошковая смесь [18] влияют на его модуль Юнга. Однако подавляющему большинству этих исследований не хватает высокого пространственного разрешения, и результаты не могут удовлетворить растущий интерес к количественной характеристике в наномасштабе. Многие исследователи обратились к альтернативным методам, таким как силовые измерения на основе атомно-силовой микроскопии (АСМ) [1, 15].
Вскоре после своего изобретения в 1980-х годах AFM зарекомендовал себя как мощный инструмент для исследования механических свойств образцов. Исторически сложилось так, что AFM способен отслеживать изменение вертикального отклонения при изменении положения пьезо Z. Регистрируются соответствующие траектории силовой нагрузки и разгрузки (кривая сила-перемещение). Затем кривая "сила-перемещение" преобразуется в кривую "сила-расстояние", которая соответствует различным моделям механики контакта. Это может быть выполнено либо в одном месте измерения (единичное изменение силы), либо в виде матричного массива, так называемого силового объема (FV). Применение обычного измерения силы требует значительных затрат времени из-за низкой частоты дискретизации, которая по сути ограничена прибором. Медленная скорость сбора данных была улучшена за счет нового метода, названного Fast Force Volume (FFV). Он может работать в диапазоне от 0,1 Гц до примерно 200 Гц. Основной рабочий механизм для FFV основан на сглаживании треугольного управляющего сигнала при переходе, что приводит к быстрому повороту между подходом и отводом. Несмотря на беспрецедентные технические достижения, еще есть возможности для улучшения с точки зрения частоты дискретизации силы. Количественное наномеханическое картирование (PFQNM) на основе PeakForce tapping (PFT) - это новый подход, который одновременно использует возможности визуализации с высоким разрешением и картирование механических свойств. PFQNM дополняет обычную форсированную громкость, увеличивая скорость дискретизации до 2 кГц. Следовательно, PFQNM, силовой объем вместе с быстрым силовым объемом составляют четыре порядка величины с точки зрения скорости нагружения / разгрузки силы. Вышеупомянутые подходы полезны с точки зрения измерения модуля упругости, например Модуль для младших. Однако они практически не обеспечивают динамического механического поведения образца. К счастью, AFM предлагает еще одну уникальную функцию, которая называется экспериментом по податливости ползучести [19]. В этой конструкции зонд АСМ приводится в контакт с поверхностью образца с предварительным натягом. Затем зонд удерживают неподвижно с фиксированной приложенной силой. Пока напряжение остается постоянным, материал подвержен ползучести. АСМ отслеживает изменение отпечатка как функцию времени. Полученные данные затем подлежат подгонке модели. В результате таких измерений можно получить обширную информацию о динамических механических свойствах материалов. Если все вышеупомянутые методы объединить вместе, они многообещают эффективно исследовать зависящие от времени механические свойства мягких полимеров.
В дополнение к силовому картированию, PFT - исключительный инструмент [20] для построения изображений топографии. В PFT Z-пьезо перемещает весь держатель зонда вверх и вниз на низких частотах, обычно в диапазоне 0,5–2 кГц. Он обеспечивает превосходный точный контроль силы, поскольку дает прямую обратную связь при вертикальном отклонении мягкого кантилевера. Способность успешно управлять максимальной силой взаимодействия получила название PeakForce tepping. Кроме того, он сохраняет высокое разрешение, а также низкую инвазивность. Эти привлекательные характеристики делают PFT идеальным методом для получения изображений топографии мягких биологических образцов и образцов полимеров. Например, режим измерения пиковой силы был успешно применен для исследования силы адгезии между проводящими полимерами [21] и событиями биораспознавания одиночных молекул [22]. На сегодняшний день PFQNM вызывает широкий интерес к характеристике механических свойств широкого спектра материалов, включая затвердевшую цементную пасту [23], живые клетки [24], амилоидные фибриллы [25], композит с полимерной матрицей [26, 27, 28]. и различные полимеры [29]. Поскольку также собираются высотные изображения с высоким разрешением, это обеспечивает удобство сопоставления локальных механических свойств с топографией образца в наномасштабе.
В этом исследовании зависящий от времени модуль упругости образца ПЭНП был оценен с использованием ряда подходов. В частности, частота линейного изменения изменяется дискретно от 0,1 до 2 кГц. Выполняются строгие калибровки, и данные подбираются с использованием соответствующей модели контактной механики Дерягина – Мюллера – Топорова (DMT). Увеличение модуля Юнга было обнаружено с увеличением частоты линейного изменения. Эксперимент по податливости ползучести был проведен, чтобы лучше понять динамическое механическое поведение LDPE. Мгновенный модуль упругости E 1 , запаздывающий модуль упругости E 2 , вязкость η , и время запаздывания τ был извлечен из подгонки стандартной линейной твердотельной модели (SLS). Многопараметрические механические измерения, а также получение изображений топографии с беспрецедентным высоким пространственным разрешением были успешно использованы для количественного наномеханического картирования мягких полимеров, таких как LDPE, и потенциально могут быть распространены на биологические системы.
Материалы и методы
Материалы
Набор образцов PeakForce QNM был приобретен у Bruker Co. (Санта-Барбара, Калифорния). В набор были включены образец смеси полимеров, образец сапфира и образец для проверки наконечника. Образец полимерной смеси состоит из тонкой пленки полистирола (PS), смешанного с полиолефином низкой плотности (LDPE). Образцы закрепляли на металлических шайбах с помощью двустороннего скотча и использовали в исходном состоянии. В соответствии с производством смесь ПС и ПЭНП (сополимер этилена и октена) была отлита центрифугированием на кремниевую подложку, создавая пленку с различными свойствами материала. Зонды RTESPA-150 были приобретены у Bruker Co. (Санта-Барбара, Калифорния) с номинальной жесткостью пружины 5 Н / м. Задняя сторона кантилеверов зонда была покрыта тонким слоем алюминия для увеличения отклонения лазерного луча.
Калибровки
Режим ScanAsyst, оснащенный системой Dimension ICON AFM (Bruker Co., Санта-Барбара, Калифорния), использовался для проведения калибровок и механических измерений. Калибровка чувствительности к отклонению кантилевера, жесткости пружины кантилевера и радиуса наконечника проводилась для изменения силы и объема силы. В этом исследовании использовались три зонда из одной партии. Протоколы калибровки были следующими. Чувствительность к отклонению кантилевера была откалибрована путем увеличения силы с помощью так называемого подхода калибровки касанием, при котором зонд RTESPA-150 помещался на очень твердую поверхность, в данном случае на образец сапфира. Выходной сигнал линейного изменения был выбран для Z. Размер линейного изменения поддерживался на уровне 200 нм, а относительный порог запуска был зафиксирован на 0,3 В выше базового фона. После того, как была построена кривая зависимости силы от Z пьезосмещения, пара линий была использована для определения наиболее линейной части области контакта. Чувствительность отклонения будет автоматически откалибрована и сохранена после нажатия кнопки "Обновить чувствительность отклонения". Измеренная чувствительность к отклонению составила 44,7 ± 4,2 нм / В ( n =3). Затем была проведена тепловая настройка для получения спектра колебаний кантилевера в свободном воздухе за счет тепловой энергии. Пик резонансной частоты был выделен и подогнан с помощью программного обеспечения NanoScope в реальном времени, которое было предоставлено производителем AFM (Bruker Co. Санта-Барбара, Калифорния). Основываясь на теории теоремы о равнораспределении,
$$ \ frac {1} {2} k _ {{\ text {B}}} T =\ frac {1} {2} kd ^ {2} $$ (1)где \ (k _ {{\ text {B}}} \) - постоянная Больцмана, \ (T \) - абсолютная температура в градусах Кельвина, а \ (d \) - среднеквадратичное значение амплитуды колебаний кантилевера. Жесткость пружины \ (k \) была рассчитана соответствующим образом с учетом поправочного коэффициента 1,09. Радиус наконечника оценивался путем осторожного сканирования зонда по контрольному образцу наконечника. Образец состоит из титана с острыми концами на некоторых участках. Каждый острый конец будет захватывать часть формы наконечника. В конце концов, изображение топографии образца можно было использовать для восстановления формы наконечника, которая, как предполагалось, была сферой. Для точной оценки радиуса наконечника также требовалась глубина вдавливания. Глубина вдавливания (18,3 ± 2,6 нм, n =3) был получен путем измерения расстояния между нулевым разделением и самой нижней точкой скачка контакта. Таким образом, эффективный радиус наконечника был откалиброван путем подстановки значения отступа в высоту 1 от вершины на контрольном изображении наконечника.
Расстояние синхронизации и чувствительность к амплитуде PFT являются уникальными для метода PFQNM. Их тоже нужно откалибровать. Расстояние синхронизации определяется как постоянная времени, при которой пьезоэлектрический преобразователь Z достигает самого нижнего положения. Чувствительность амплитуды PFT называется коэффициентом масштабирования, который передает цифровой входной управляющий сигнал на физическое пьезо-смещение Z. Его точность гарантирует, что пьезо Z перемещается по желанию. И расстояние синхронизации, и чувствительность к амплитуде PFT были откалиброваны на сапфировом образце с использованием метода калибровки касанием. Примечательно, что расстояние синхронизации и чувствительность амплитуды PFT зависят от частоты. Оба были откалиброваны на дискретных частотах. В этой работе был выбран широкий диапазон частот от 0,125 кГц до 2 кГц.
PFQNM Количественное наномеханическое отображение
Зонды RTESPA-150 загружали для количественного наномеханического картирования образца LDPE. Калиброванная жесткость пружины составила 3,9 ± 1,4 Н / м (n =3). После сканирования пользователь устанавливает заданное значение силы на 5 нН, позволяя ScanAsyst автоматически управлять скоростью получения изображений (скоростью сканирования), коэффициентом обратной связи и диапазоном Z. Размер цифрового пикселя составлял 256 × 256 на изображение. Частота PFT варьировалась от 2k до 0,125k Гц между экспериментами, чтобы произвести силовую нагрузку и разгрузку, зависящую от времени. Для амплитуды PFT 100 нм при частоте PFT 2 кГц соответствующая скорость силового нагружения составляла 0,8 мм / с −1 . Коэффициент Пуассона для вязкоупругого ПЭНП был принят равным 0,35 [13]. Область обзора 5 мкм × 5 мкм сканировалась одновременно с топографическими и механическими измерениями. Контроллер NanoScope имел достаточную пропускную способность для вычисления механических данных и отображения их в программных каналах в реальном времени. Эти данные были сохранены в виде необработанных изображений для дальнейшего автономного анализа. Таким образом, был захвачен ряд каналов изображения, включая датчик высоты, модуль ДМТ, карту адгезии, каналы вдавливания и рассеивания энергии. После того, как компоненты ПВД и полистирола были идентифицированы. Измерения PFQNM с высоким пространственным разрешением на LDPE были выполнены при сканировании 0,5 мкм × 0,5 мкм.
Изменение силы AFM и объем быстрой силы
Наклон силы и быстрый объем силы были достигнуты путем линейного изменения пьезосмещения по оси Z при отслеживании вертикального отклонения кантилевера. Размер рампы составлял 200 нм. Заданное значение низкого усилия срабатывания на уровне 5 нН было достигнуто с помощью механизма вычитания постоянного фона, который исключает дрейф отклонения во время процесса линейного нарастания. Массив для отбора проб с линейным изменением силы был определен на участке 0,5 мкм × 0,5 мкм. Скорости нарастания составляли 0,1 Гц, 1 Гц, 10 Гц, 20 Гц, 61 Гц и 122 Гц. Для скорости нарастания 1 Гц и размера нарастания 200 нм соответствующая скорость силового нагружения составляла 400 нм / с -1 . . Были собраны кривые изменения 16 × 16 для 0,1 Гц и 1 Гц, в то время как кривые изменения скорости 128 × 128 для 10 Гц, 20 Гц, 61 Гц и 122 Гц.
Эксперимент по ползучести
Сканер Звездных врат был откалиброван по дрейфу для эксперимента по ползучести. Зонды RTESPA-150 приводили в контакт с аккуратной областью LDPE образца PS / LDPE до тех пор, пока они не достигли заданной силовой нагрузки 2 нН. Функция контроля поверхности программного обеспечения NanoScope позволяла удерживать зонд на образце в течение определенного периода времени, в данном случае 5 секунд. Этот период получил название холд-сегмента. Приложенная сила поддерживалась постоянной, удерживая спусковое усилие. Для сегмента удержания было собрано тысяча двадцать четыре точки данных. Были получены данные датчика высоты в зависимости от времени и ошибки отклонения (силы) в зависимости от времени. Было снято не менее 50 кривых ползучести в случайно выбранных местах. Было проведено три независимых эксперимента. На образце сапфира был проведен холостой контрольный эксперимент. Как и ожидалось, заметных изменений Z не наблюдалось.
Экспериментальная установка
Чтобы количественно отобразить механические свойства образца ПЭНП (рис.1), эксперимент был спроектирован таким образом, что острый наконечник кантилевера врезался в образец ПЭНП и отодвигался от поверхности образца при достижении заданной силовой нагрузки ( Рис. 1а). Сила регистрировалась путем регистрации сигнала вертикального отклонения в позиционно-чувствительном фотодиоде (PSPD). Движение кантилевера было вызвано пьезодвижением Z. В зависимости от выбора метода управляющий сигнал может быть треугольной волной (FV), треугольной волной со скругленными углами (FFV) или синусоидальным сигналом (PFQNM). PFQNM схематически изображен на рис. 1b, кривая зависимости силы от времени ясно демонстрирует, что острие подвергается защелкивающемуся контакту при приближении к поверхности образца и размыкающему контакту при удалении от поверхности образца. Расстояние синхронизации определяет точку поворота, которая отделяет кривую подвода от кривой отвода. На твердой поверхности эта точка была постоянной времени, когда пьезоэлемент Z достиг самого нижнего положения. Это также означало, когда сила достигла пика силы. Напротив, на мягком податливом образце эта точка может немного сместиться из-за зависящей от времени деформации образца. Независимо от используемых методов, АСМ регистрировала кривую зависимости силы от Z смещения и в дальнейшем конвертировала в кривую зависимости силы от зонд-образец (рис. 1c). Контактная часть кривой ретракции была приспособлена к линеаризованной модели DMT, описанной ниже, и был извлечен модуль упругости DMT. Диссипация энергии рассчитывалась путем интегрирования петли гистерезиса. Кантилевер с подходящей жесткостью пружины был выбран осмотрительно, чтобы острие кантилевера могло вдавливаться в образец, но при этом обладало достаточной чувствительностью к усилию. С другой стороны, также необходимо учитывать радиус наконечника, поскольку приложенное напряжение также зависит от площади контакта. В свете этого были выбраны датчики RTESPA-150, поскольку они создают необходимое усилие для вдавливания в образец, но при этом сохраняют высокую чувствительность к усилию.
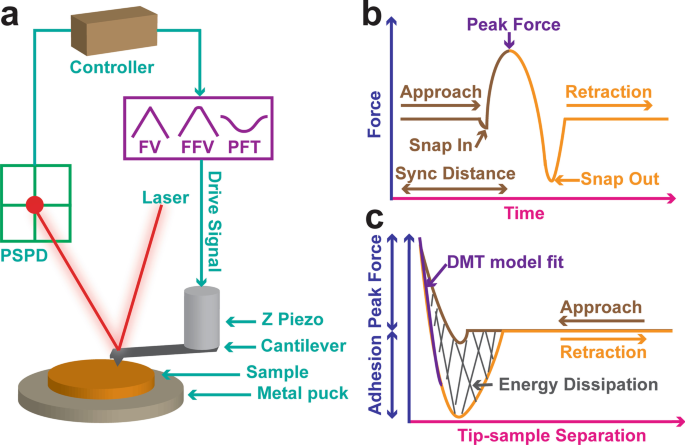
Механизм нарастания силы АСМ, экспериментальный план, сбор и интерпретация данных. Образец ПЭНП закрепляли на металлической шайбе. Острый наконечник кантилевера врезался в образец ПЭНП и отодвинулся, когда было достигнуто заданное приложенное усилие ( a ). Лазер светил сверху, ударил и отразился от тыльной стороны кантилевера. Сигнал отклонения принимался позиционно-чувствительным фотодиодом (PSPD). Движение кантилевера приводилось прикрепленным Z-пьезо. В зависимости от выбора метода управляющий сигнал может быть треугольной волной (FV), треугольной волной со скругленными углами (FFV) или синусоидальной волной (PFQNM). Измерение силы PFQNM схематически изображено на b . График зависимости силы от времени ясно показывает, что игла претерпевала защелкивающийся контакт при приближении к поверхности образца и размыкание контакта при отведении от поверхности образца. Расстояние синхронизации - это постоянная времени, при которой датчик высоты достигает самого нижнего положения. Кривая зависимости силы от Z смещения (F-Z) была записана с помощью АСМ и затем преобразована в кривую зависимости силы от расстояния между зондом и образцом (F-D) ( c ). Модуль ДМТ был получен путем подбора контактной части кривой ретракции с моделью ДМТ. Интегрирование по петле гистерезиса было названо диссипацией энергии
Анализ данных
Автономный анализ данных проводился с помощью программного обеспечения NanoScope Analysis (Bruker Co., Санта-Барбара, Калифорния), поставляемого заводом AFM. Все топографические изображения подвергались сглаживанию первого порядка, что позволяет избавиться от пьезодрейфа Z, фонового шума, а также исправить наклон образца. Шероховатость поверхности оценивалась с помощью функции шероховатости, предоставляемой программой NanoScope Analysis.
$$ R _ {{\ text {q}}} =\ sqrt {\ frac {{\ sum \ left ({Z _ {{\ text {i}}} - Z _ {{\ text {m}}}} \ right ) ^ {2}}} {N}} $$ (2)где \ (N \) - общее количество точек в области изображения, \ (Z _ {{\ text {i}}}} \) - высота \ (Z \) i th, а \ (Z _ {{\ text {m}}} \) - средняя высота \ (Z \) по всей области. Все изображения с механическими данными остались нетронутыми без выравнивания.
И линейная нагрузка, и быстрый объем силы, и PFQNM дали кривые зависимости силы от Z пьезосмещения (F-Z). Кривые зависимости силы от разделения зонда и образца (F-D) более физически значимы и требуются для подгонки модели. Смещение по оси Z состоит из трех компонентов, а именно разделения зонда и образца ( D ), отклонение кантилевера ( d ) и глубина отступа (\ (\ delta \)). Преобразование F-Z в F-D требует вычитания отклонения кантилевера ( d ) и глубина вдавливания (\ (\ delta \)) от Z смещения. Это можно сделать либо в программном обеспечении управления в реальном времени, либо в программном обеспечении для автономного анализа данных, при условии, что были откалиброваны чувствительность к отклонению кантилевера и жесткость пружины. Кроме того, была выполнена функция коррекции базовой линии для смещения базовой линии кривой силы до нуля. Наконец, были получены кривые F-D, которые были подобраны для модели DMT. Согласно теории контакта Герца,
$$ F _ {{{\ text {appl}}}} =\ frac {4} {3} E_ {r} \ sqrt R \ delta ^ {{\ frac {3} {2}}} + F _ {{{ \ text {adh}}}} $$ (3)где \ (F _ {{{\ text {appl}}}} \) - сила, приложенная наконечником к образцу. Учитывается сила сцепления (\ (F _ {{{\ text {adh}}}} \)). \ (R \) - это радиус вершины предполагаемой вершины сферы. \ (\ delta \) - глубина отступа. \ (E _ {{\ text {r}}} \) - приведенный модуль Юнга. Это связано с модулями наконечника и образца
$$ \ frac {1} {{E _ {{\ text {r}}}}} =\ left ({\ frac {{1 - v _ {{\ text {s}}} ^ {2}}} {{ E _ {{\ text {s}}}}}} \ right) + \ left ({\ frac {{1 - v _ {{\ text {t}}} ^ {2}}} {{E _ {{\ text {t}}}}}} \ right) $$ (4)где \ (v _ {{\ text {s}}} \) и \ (v _ {{\ text {t}}} \) - коэффициенты Пуассона образца и наконечника АСМ соответственно. \ (E _ {{\ text {s}}} \) и \ (E _ {{\ text {t}}} \) - модули Юнга образца и наконечника АСМ соответственно. Модуль Юнга наконечника на несколько порядков больше, чем у образца LDPE, поэтому членом наконечника можно пренебречь. Когда \ (E _ {{\ text {r}}} \) и \ (v _ {{\ text {s}}}} \) известны, \ (E _ {{\ text {s}}} \) можно легко рассчитано.
Принимая обе стороны уравнения. (3) в степень \ (\ frac {2} {3} \) после вычитания \ (F _ {{{\ text {adh}}}} \) из \ (F _ {{{\ text {appl}} }} \), была использована линеаризованная модель для соответствия всем силовым данным [30]. Эта модель не требует указания контактного лица.
$$ \ left ({F _ {{{\ text {appl}}}} - F _ {{{\ text {adh}}}}} \ right) ^ {{\ frac {2} {3}}} =\ left ({\ frac {4} {3} E _ {{\ text {r}}} \ sqrt R} \ right) ^ {{\ frac {2} {3}}} \ delta $$ (5)Затем в результате были извлечены \ (E _ {{\ text {r}}} \) и \ (E _ {{\ text {s}}} \).
$$ E _ {{\ text {r}}} =\ frac {3} {4} \ left ({\ frac {{\ left ({F _ {{{\ text {appl}}}} - F _ {{{ \ text {adh}}}}} \ right) ^ {{\ frac {2} {3}}}}} {\ delta}} \ right) ^ {{\ frac {3} {2}}} \ frac {1} {{\ sqrt R}} =\ frac {3} {4} \; {\ text {slope}} ^ {{\ frac {3} {2}}} \ frac {1} {{\ sqrt R}} $$ (6)Приложенная сила рассчитывалась по закону Гука, поскольку консоль действует как пружина.
$$ F _ {{{\ text {приложение}}}} =k \ times d $$ (7)где \ (k \) - жесткость пружины кантилевера, а \ (d \) - прогиб кантилевера, который был рассчитан путем умножения чувствительности кантилевера на сигнал вертикального отклонения.
Для анализа ползучести была принята версия модели SLS Фойгта [19]. В этой трехэлементной модели пружина ( E 1 ) последовательно с пружиной ( E 2 ) -dashpot элемент Voigt параллельно. Расстояние сжатия ( d ) как функцию времени можно описать как:
$$ d (t) =\ frac {F} {{k_ {1}}} + \ frac {F} {{k_ {2}}} \ times \ left ({1 - {\ text {e}} ^ {{- \ frac {{tk_ {2}}} {\ eta}}}} \ right) $$ (8)где F полная сила нагрузки, k 1 и k 2 эластичность E 1 и E 2 , соответственно. η представляет собой вязкость дашпота. Поскольку область взаимодействия зонд-образец представляет собой конечную область, а не отдельную точку. Модель можно улучшить, переписав уравнение в терминах напряжения, деформации и модуля. В этом исследовании был использован метод, разработанный Ламом и его коллегами. Их аналогичное уравнение:
$$ \ varepsilon (t) =\ frac {\ sigma} {{E_ {1}}} + \ frac {\ sigma} {{E_ {2}}} \ times \ left ({1 - {\ text {e }} ^ {{- \ frac {{tE_ {2}}} {\ eta}}}} \ right) $$ (9)где ε ( т ) обозначает деформацию как функцию времени, σ это стресс. E 1 и E 2 - мгновенный и запаздывающий модули упругости соответственно. η представляет собой вязкость дашпота. Кроме того, напряжение σ и деформация ε связаны с модулем E или соответствие D следующими отношениями.
$$ E =\ frac {\ sigma} {\ varepsilon} =\ frac {1} {D} $$ (10)Таким образом, уравнение (9) можно переписать как:
$$ D =\ frac {1} {E} =\ frac {1} {{E_ {1}}} + \ frac {1} {{E_ {2}}} \ times \ left ({1 - {\ текст {e}} ^ {{- \ frac {{tE_ {2}}} {\ eta}}}} \ right) $$ (11)где D и E обозначают податливость ползучести и комбинированный модуль упругости системы соответственно. Перепишите уравнение. (5) как
$$ \ delta =\ left ({\ frac {{3 \ left ({F _ {{\ text {appl}}}} - F _ {{{\ text {adh}}}}} \ right)}} { {4 \ sqrt R E _ {{\ text {r}}}}}} \ right) ^ {{\ frac {2} {3}}} $$ (12)Подставляя уравнение. (11) в уравнение. (12) приводит к
$$ \ delta \ left (t \ right) =\ left \ {{\ frac {{3 \ left ({F _ {{{\ text {app}}}} - F _ {{{\ text {adh}}}} }} \ right)}} {{4 \ sqrt R}} \ times \ left ({\ frac {1} {{E_ {1}}} + \ frac {1} {{E_ {2}}} \ times \ left ({1 - {\ text {e}} ^ {{- \ frac {{tE_ {2}}} {\ eta}}}} \ right)} \ right)} \ right \} ^ {{\ гидроразрыв {2} {3}}} $$ (13)Данные ползучести могут быть подогнаны по формуле. (13) и время запаздывания τ можно получить с помощью
$$ \ tau =\ frac {\ eta} {{E_ {2}}} $$ (14)Время замедления - это время, за которое произошло ~ 63% ползучести.
Все измерения силы повторяли трижды. Результаты были представлены в виде среднего значения ± стандартное отклонение (стандартное отклонение), а количество независимых экспериментов было обозначено как n . =3.
Результаты
Чтобы оценить эффективность и точность PFQNM, было выполнено большое обзорное сканирование размером 5 мкм × 5 мкм. Типичные изображения PFQNM образца смеси PS / LDPE при 2 кГц были собраны на рис. 2. На рис. 2a – d показаны изображение датчика высоты, канал модуля DMT, канал вдавливания и канал рассеяния энергии. Плоская область была компонентом PS, а область выпуклости - LDPE (рис. 2a). По завершении обзорного сканирования AFM получил указание физически увеличить область LDPE и выполнить сканирование небольшого размера с высоким разрешением (1,3 мкм × 1,3 мкм). Соответствующие каналы изображения показаны на рис. 2e – h.
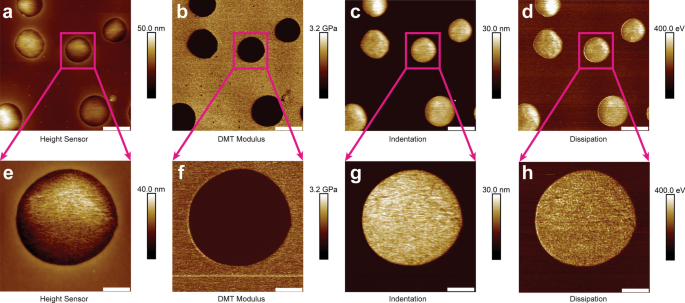
Типичное наномеханическое отображение PFQNM (5 мкм × 5 мкм) образца смеси PS / LDPE на частоте 2 кГц. Панели a - г - изображение датчика высоты, канал модуля DMT, канал вдавливания и канал рассеяния энергии. Для изображений a - г масштабные линейки представляют 1 мкм. По завершении обзорного сканирования АСМ направляется для физического увеличения области LDPE и выполнения сканирования небольшого размера с высоким разрешением (1,3 мкм × 1,3 мкм). Соответствующие каналы изображений отображаются на панелях e – h . . Масштабная линейка представляет 260 нм для панелей e . - ч
Затем PFQNM, FV и FFV были проведены на аккуратной области LDPE размером 0,5 мкм × 0,5 мкм. Репрезентативный набор PFQNM на 2 кГц был собран на рис. 3a – d. Они включали датчик высоты, отображение модуля, рассеяние энергии и вдавливание. Шероховатость поверхности изображения датчика высоты была представлена в форме \ (R _ {{\ text {q}}} \) и составила 2,58 ± 0,35 нм. Другой типичный набор FFV на частоте 122 Гц показан на рис. 3e, f. Обратите внимание, что для FV и FFV не было каналов рассеяния энергии и вдавливания. Модули упругости на разных частотах были объединены (рис. 3g). Данные модулей Юнга представлены в таблице 1. Модули Юнга при 0,1 Гц, 1 Гц, 10 Гц, 20 Гц, 61 Гц, 122 Гц, 125 Гц, 250 Гц, 500 Гц, 1 кГц и 2 кГц составили 11,7 ± 5,2 МПа ( n =3), 18,2 ± 5,6 МПа ( n =3), 25,4 ± 6,8 МПа ( n =3), 29,6 ± 8,4 МПа ( n =3), 33,8 ± 9,7 МПа ( n =3), 35,7 ± 10,5 МПа ( n =3), 43,8 ± 10,7 МПа ( n =3), 54,8 ± 11,9 МПа ( n =3), 66,7 ± 13,6 МПа ( n =3), 80,9 ± 14,2 МПа ( n =3), 89,6 ± 17,3 МПа ( n =3) соответственно. Диаграмма разброса была построена с помощью программного обеспечения Origin 8.5. Данные были подогнаны с помощью степенной функции, дающей \ (E =15,31 \ times f ^ {{0,23}} \) (\ (R ^ {2} \) =0,96). Взаимосвязь между диссипацией энергии и различными частотами отображения показана на рис. 3h. Значения рассеяния энергии, полученные при 2 кГц, 1 кГц, 0,5 кГц, 0,25 кГц и 0,125 кГц, составили 173,2 ± 21,9 эВ ( n =3), 213,8 ± 32,7 эВ ( n =3), 233,9 ± 29,3 эВ ( n =3), 261,1 ± 33,5 эВ ( n =3), 293,2 ± 35,6 эВ ( n =3) соответственно. Данные были подогнаны с помощью степенной функции:\ (E _ {{{\ text {dis}}}}} =202,83 \ times f ^ {{- 0,18}} ~ \) (\ (R ^ {2} \) =0,97 ). Репрезентативная кривая F-D показала два отчетливых отрыва наконечника АСМ от поверхности образца ПЭНП (рис. 3i). Возникновение множественных разрывов чаще происходило на более низких частотах, т.е. 0,1–1 Гц.
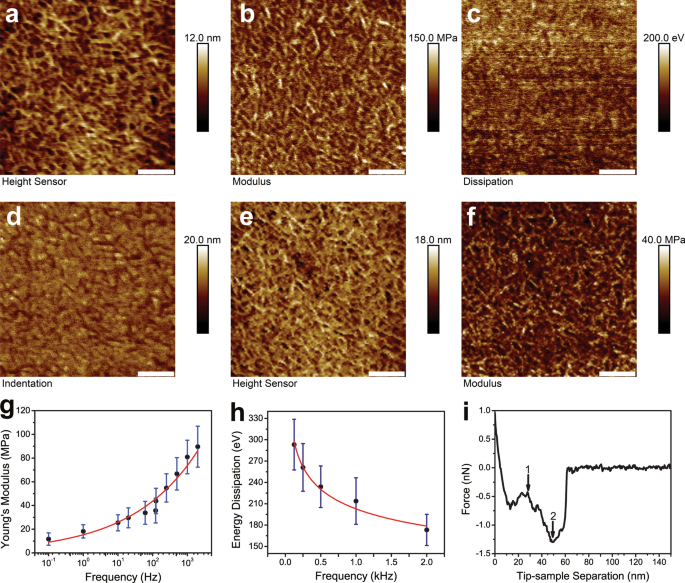
Механические свойства образца ПЭНП отображены на разных частотах. Панели a - г были изображение датчика высоты, канал модуля DMT, рассеяние энергии и канал вдавливания, захваченные с помощью PFQNM на частоте 2 кГц на аккуратной области LDPE. Шероховатость поверхности изображения датчика высоты была представлена в форме \ (R _ {{\ text {q}}} \) и составила 2,58 ± 0,35 нм. Панели e и f представляют собой изображение датчика высоты и канал модуля упругости DMT, снятые с помощью FFV при 122 Гц на аккуратной области LDPE. Для изображений a - е , масштабные линейки представляют 100 нм. Связь между измеренным модулем Юнга ( E ) и частота отображения силы ( f ) был нанесен в г . Измеренные модули Юнга на разных частотах были сведены в таблицу 1. Данные были подогнаны с помощью степенной функции, которая дала \ (E =15.31 \ times f ^ {{0.23}} \) (\ (R ^ {2} \) =0.96 ). Связь между рассеянием энергии ( E дисс ) и различные частоты отображения ( f ) был показан на панели h . Значения рассеяния энергии, полученные при 2 кГц, 1 кГц, 0,5 кГц, 0,25 кГц и 0,125 кГц, составили 173,2 ± 21,9 эВ, 213,8 ± 32,7 эВ, 233,9 ± 29,3 эВ, 261,1 ± 33,5 эВ, 293,2 ± 35,6 эВ, соответственно. Данные были подогнаны с помощью степенной функции:\ (E _ {{{\ text {dis}}}}} =202,83 \ times f ^ {{- 0,18}} ~ \) (\ (R ^ {2} \) =0,97 ). A representative F-D curve showed two distinct ruptures of AFM tip from LDPE sample surface (panel i ). The occurrence of multiple ruptures took place more frequently at lower frequencies, i.e. 0.1–1 Hz
Lastly, creep compliance measurement was carried on a neat LDPE region of the PS/LDPE sample. The working principle of AFM creep experiment was illustrated in Fig. 4a. Initially, the AFM tip was brought into contact with sample surface until the predefined force setpoint was reached. The tip was sthen held onto the sample for a certain time period, during which the force was kept constant. Following that, the tip was retracted. In the hold segment, the AFM recorded the change in Z motion. The change in indentation depth as a function of time (Fig. 4b) could be fitted with Voigt version of SLS model using Eq. (13). A representative creep curve was shown in Fig. 4c. The black curve was the data while the red solid line was the fitting curve. The inset indicated the Voigt version of SLS model, featuring a spring (E 1 ) in series with a spring (E 2 )-dashpot (η ) Voigt element in parallel. The experiment showed that instantaneous elastic modulus E 1 , delayed elastic modulus E 2 , viscosity η , retardation time τ were 22.3 ± 3.5 MPa, 43.3 ± 4.8 MPa, 38.7 ± 5.6 MPa‧s and 0.89 ± 0.22 s, respectively. The data were tabulated in Table 2.

Creep compliance measurement on a neat LDPE region of the PS/LDPE sample. The working principle of AFM creep experiment was illustrated in panel a . Initially, the AFM tip was brought into contact with sample surface till it reached the predefined force setpoint. The tip was then held onto the sample for a certain time period, during which the force was kept constant. Following that, the tip was retracted. In the hold segment, the AFM recorded the change in Z motion (panel b ). The change in indentation depth as a function of time could be fitted with Voigt version of SLS model using Eq. (13). A representative creep curve was shown in panel c . The black curve was the data, while the red solid line was the fitting curve. The inset indicated the Voigt version of SLS model, featuring a spring (E 1 ) in series with a spring (E 2 )-dashpot (η ) Voigt element in parallel
Обсуждение
In the present study, a comprehensive powerful nanomechanical mapping approach for polymer samples has been developed by incorporating a number of nanoscale AFM based force measurements. The approach allows simultaneous high-resolution topography imaging and quantitative nanomechanical mapping. Local mechanical behavior can be correlated with sample topography. More importantly, the time dependent mechanical response of soft viscoelastic materials has been successfully mapped out. The Hertz model is a widely received contact mechanics model [31], in which the scenario when a rigid probe indents a semi-infinite, isotropic, homogeneous elastic surface is described. However, the Hertz model assumes no surface forces, which is not true for soft materials. To overcome this shortcoming, the Johnson–Kendall–Roberts (JKR) model and the DMT model have been developed. Given the setup in this study, the DMT model can be implemented as there are high elastic modulus, low adhesion, and small tip radius involved where long rang surface forces exist. The force setpoint at 5 nN has been empirically obtained, and justified to be the optimum value in terms of getting meaningful indentation depth while the DMT model still holds. Low force load also gives rise to sample deformation in elastic regime not plastic regime. In addition, sharp tip enables high resolution sample topography imaging in PFQNM measurements, which is an attractive advantage when correlates sample topography with mechanical properties.
Tip radius estimation is not trivial in quantitative mechanical measurements. Many researches estimate the tip radius by backward calculation using a sample with known modulus [29, 32]. This work adopts a different reconstruction strategy that does not require such a sample. It has been documented that using blunt tips tend to yield tighter modulus numbers and that sharp tips may overestimate the modulus. However, sharp tips preserve high spatial resolution, an advantage not possessed by other techniques. Polymer fibrils are clearly seen (see a 0.5 µm × 0.5 µm scan in Fig. 3). Sharp tips, even under small load, can penetrate into compliant samples due to large stress, resulting in large indentation. Therefore, it could compromise the validity of the DMT model. That is not the case in this study as the applied force is controlled in a precise and sensitive manner, evidenced by the resulted indentation depth and the effective tip radius in the same order of magnitude (22.5 ± 3.2 nm, n =3). Surface roughness (\(R_{{\text{q}}}\)) of the LDPE height image is 2.58 ± 0.35 nm, indicating the surface is flat and surface roughness should not be treated as a confounding factor to quantitative measurements [33]. In addition, the linearized DMT model fit does not require determination of the contact point that could otherwise lead to major errors in the final calculated modulus [34]. Taken together, the current experiment setup fulfills the DMT model.
To evaluate the effectiveness of PFQNM, the PS/LDPE sample has been scanned at large size. The survey scan shows LDPE has higher adhesion than PS (Fig. 2b), suggesting LDPE is stickier. AFM tip indents deeper in LDPE than in PS (Fig. 2c), indicating LDPE is softer than PE. The determined Young’s moduli for LDPE and PS are about 90 MPa and 2.5 GPa, respectively. The PS region is a little stiff for RTESPA-150 probe to indent, thus the measured modulus tends to be higher than the nominal value. Both PFQNM and FFV generate high resolution topography and modulus images (c.f. Fig. 3a, b, e, f). It is noteworthy that FFV requires reasonable data acquisition time, although it is not as impressive as PFQNM but much faster than traditional force ramp. Energy dissipation is an observable that explicitly demonstrates how much energy loss per tapping cycle (Fig. 3h). The more viscoelastic of the material, the more energy loss it incurs. The energy dissipation map demonstrates that AFM probe loses more energy on LDPE than on PS, implying LDPE is viscoelastic and response time plays an important role. The relaxation function for the power-law rheology model is described as \(\varphi =E_{{\text{a}}} \left( {\frac{t}{{t_{0} }}} \right)^{{ - \gamma }}\) [35], where E а is the apparent Young’s modulus at time t 0 , is the power-law exponent γ и t 0 is a timescale factor which is set to 1 s. The dimensionless number γ characterizes the viscoelastic behavior of the material, with γ = 0 for purely elastic solid and γ = 1 for purely Newtonian fluid [36]. Current study indicates LDPE has more elastic behavior than viscous counterpart. Figure 3i exhibits an interesting finding in FV experiments that a force curve harboring two rupture events. The multiple rupture events occur more frequently in lower frequencies, i.e. 0.1–1 Hz. It is conceivable that with lower frequency, the tip dwells longer on sample surface that results in forming stronger bonds. When tip is retracted, the slower motion of tip would break the bonds at lower speed, providing the chance of being captured by AFM [37]. On the contrary, when performed at higher frequencies, weaker bonds are formed due to short dwell period and AFM is not capable of capturing transition rupture events due to poor temporal resolution. Another plausible explanation is that the combination of force exerted and longer interaction time on sample induces polymer chain conformation change, as reported previously that force induces rotation of carbon–carbon double bonds [38]. With piconewton force sensitivity and sub-nanometer distance accuracy, F-D curves not only reveal the strength of the formed bonds but also shed insights into the elastic properties and conformational changes. It was documented that at low forces (< 100 pN) and large forces (> 300 pN) the mechanical behavior of polymer chains is majorly affected by its entropic elasticity and enthalpic elasticity, respectively [39].
To further investigate the time dependent mechanical response of LDPE, creep compliance experiment has been carried out on the premise that the closed-loop scanner has been drift calibrated. Experimental data show that instantaneous elastic modulus E 1 , delayed elastic modulus E 2 , viscosity η , retardation time τ are 22.3 ± 3.5 MPa, 43.3 ± 4.8 MPa, 38.7 ± 5.6 MPa s and 0.89 ± 0.22 s, respectively (Table 2). This set of values for creep behavior is close to those reported for polyurethane nanocomposites [40] and syndiotactic polypropylene [41] and higher than those for bacterial biofilm [19] and live cells [36, 42]. While large AFM indenter platform measures elastic modulus of soft samples in an ensemble way, it does not enjoy high spatial resolution of elasticity. Such local mechanical properties are critical for some specimen. For instance, cell membranes are composed of various substructures like cytoskeleton, filament network and microvilli, each has varying elasticities [30]. A recent paper has studied the elastic modulus of fibroblast cells in the frequency range of 0.3–250 Hz [43]. The authors have discovered raised apparent Young’s modulus when ramp frequency increased, consistent with the observations of current study. The approaches reported here are as reliable as any other nanomechanical techniques provided the force-indentation has been prudently designed and the data analysis has been carefully executed. The PFQNM measurement is particularly helpful due to its localized correlation of sample topography with mechanical behavior. It is advantageous in terms of local non-destructive probing of mechanical properties over traditional instrumented indentation, where large probe tip is used and large destructive force is applied. Furthermore, the AFM creep experiment provides dynamic mechanical behavior at nanoscale. The methodology presented here offers multiparametric, multifunctional probing of mechanical measurement along with exceptional high spatial resolution. It has been successfully exploited for quantitative nanomechanical mapping of soft polymers such as LDPE, and can potentially be extended to complex biological systems [43,44,45].
Выводы
Utilizing state-of-the-art PFQNM as well as with FV and FFV, the power-low rheology of a LDPE sample has been evaluated in a time-dependent fashion. Specifically, rigorous calibrations are done. Force data are fitted with a linearized DMT contact mechanics model considering surface adhesion force. Elastic Young’s modulus was measured at frequencies spanned four orders of magnitude. Increased Young’s modulus was discovered with increasing acquisition frequency. The Young’s modulus is 11.7 ± 5.2 MPa at 0.1 Hz but increases to 89.6 ± 17.3 MPa at 2 kHz. The acquisition frequency dependent modulus change could be described by a power function \(E =15.31 \times f^{{0.23}}\) (\(R^{2}\) = 0.96). Energy dissipation in the range of 0.125–2 kHz further supports this observation. Furthermore, creep compliance experiment shows that instantaneous elastic modulus E 1 , delayed elastic modulus E 2 , viscosity η , retardation time τ are 22.3 ± 3.5 MPa, 43.3 ± 4.8 MPa, 38.7 ± 5.6 MPa‧s and 0.89 ± 0.22 s, respectively. The multiparametric, multifunctional local probing of mechanical measurement along with exceptional high spatial resolution imaging open new opportunities for quantitative nanomechanical mapping of soft polymers, and can potentially be extended to biological systems.
Доступность данных и материалов
Наборы данных, использованные или проанализированные в ходе текущего исследования, можно получить у соответствующего автора по разумному запросу.
Сокращения
- AFM:
-
Атомно-силовая микроскопия
- DMT:
-
Derjaguin–Muller–Toporov
- FFV:
-
Fast force volume
- FV:
-
Force volume
- JKR:
-
Johnson–Kendall–Roberts
- LDPE:
-
Low density polyolefin
- PFQNM:
-
Количественное наномеханическое картирование PeakForce
- PFT:
-
PeakForce tapping
- PS:
-
Полистирол
Наноматериалы
- Отображение расхода температуры в доме с помощью дешевых датчиков
- Аддитивное производство с использованием композитов в аэрокосмической и оборонной промышленности
- Механический композит LiNi0.8Co0.15Al0.05O2 / углеродных нанотрубок с улучшенными электрохимическими характеристикам…
- Межфазные, электрические характеристики и характеристики совмещения полос стопок HfO2 / Ge с прослойкой SiO2, сфор…
- Изготовление наноразмерных ямок с высокой производительностью на полимерной тонкой пленке с использованием…
- Эволюция области контакта при нормальной нагрузке для шероховатых поверхностей:от атомных к макроскопическ…
- Изучение силы адгезии и стеклования тонких пленок полистирола с помощью атомно-силовой микроскопии
- Идентификация характерных макромолекул генотипов Escherichia coli с помощью наномасштабного механического картиро…
- Мягкий тактильный датчик с характеристиками, сравнимыми с кожей, для роботов
- Высокоскоростные шпиндели с большим крутящим моментом