


Промышленный робот
<час />
Фон
Промышленные роботы - это механические устройства, которые в определенной степени повторяют движения человека. Они используются всякий раз, когда необходимо уменьшить опасность для человека, обеспечить большую силу и точность, чем у человека, или когда требуется непрерывная работа. Большинство роботов стационарны, но некоторые перемещаются по рабочему месту, доставляя материалы и расходные материалы.
Многие люди думают о роботах как о монстрах гуманоидного типа, которых можно увидеть в научной фантастике и фильмах в жанре фэнтези. Хотя когда-нибудь у нас может появиться техническая возможность произвести такую машину, сегодняшние роботы на самом деле являются довольно простыми устройствами. Движения, которые мы считаем само собой разумеющимися - например, поднятие монеты со стола - значительно труднее для робота. Наш мозг обрабатывает тысячи различных битов данных из наших глаз, чтобы дать нашей руке, запястью, руке и пальцам команду дотянуться, схватить и поднять монету. Даже тактильное ощущение от монеты постоянно обновляет наш мозг, чтобы обеспечить давление пальца, достаточное для надежного удержания монеты. Любые вариации позы без труда компенсируются нашим мозгом. Чтобы легко и экономично запрограммировать промышленного робота для выполнения той же задачи, многие из этих переменных должны быть ограничены или исключены. Положение, досягаемость, вес и хват должны оставаться как можно более постоянными, чтобы изменения не привели к пропаданию или падению объекта. Компьютер, который управляет роботом, должен быть запрограммирован техником, чтобы «научить» машину выполнять движение. Области, в которых роботы работают лучше людей, - это точность и повторяемость. В то время как некоторые люди могут каждый раз поднимать монету одинаковыми движениями, робот может выполнять операцию точно такими же движениями, не утомляясь. Многие роботы могут повторять движения с точностью до нескольких тысячных долей дюйма и работают 24 часа в сутки. Благодаря этой неутомимой и точной работе, роботы становятся все более популярным сегментом закупок промышленного оборудования. Большинство из них используются для повторяющихся операций покраски и сварки, в то время как другие, известные как роботы для захвата и размещения, используются для подъема и размещения продуктов в машинах и упаковках.
История
Роботы или «робототехника» - это сегмент более широкой науки об автоматизации. Автоматизация использует машины и компьютеры, которые могут обучаться или компенсировать изменяющиеся условия работы. Термин «робот» восходит к чешскому слову robota, что означает принудительный труд. Термин впервые появился в 1921 году в спектакле «Р.У.Р.». (Универсальные роботы Россум) чешского драматурга Карела Чапека. В пьесе описываются роботы-гуманоиды, уничтожившие своих создателей - почти такой же сюжет, что и в некоторых современных фантастических триллерах.
Практические роботы были впервые применены после разработки компьютера. В конце 1960-х Стэнфордский исследовательский институт спроектировал и построил экспериментального робота под названием «SHAKEY». Используя телекамеру и компьютер, эта машина могла перемещать и складывать блоки в стопки. В середине 1970-х годов General Motors профинансировала программу Массачусетского технологического института по разработке автоматизированного робота для сборки. Здесь исследователь Виктор Шейнман изобрел PUMA (универсальный программируемый манипулятор для сборки), и началось проникновение роботов в американскую промышленность.
Сырье
Роботы в основном построены из обычных материалов. Некоторые специализированные роботы для чистых помещений, космической программы или других «высокотехнологичных» проектов могут использовать металлический титан и структурные композиты из углеродных волокон. Условия эксплуатации и требуемая прочность являются основными факторами при выборе материала.
Сталь, чугун, чугун, и алюминий чаще всего используются для рук и оснований роботов. Если робот мобильный, его обычно оснащают резиновыми шинами для бесшумной работы и надежного сцепления с полом. Роботы содержат значительное количество электроники и проводки, а некоторые из них управляются с помощью радио или лазера. Цилиндры и другие механизмы, создающие движение, содержат гидравлическое масло или сжатый воздух. Шланги из силикона, резины и плетеной нержавеющей стали соединяют эти механизмы с регулирующими клапанами. Чтобы защитить робота от окружающей среды, некоторые открытые участки закрыты гибкими неопреновыми экранами и складными сильфонами. Электродвигатели и линейные приводы закупаются у поставщиков средств автоматизации вместе с контроллером, или «мозгом». Контроллеры размещаются в стальных электрических шкафах, расположенных рядом с рабочей зоной робота, или переносятся на борту самого робота.
Производственный
процесс
Дизайн
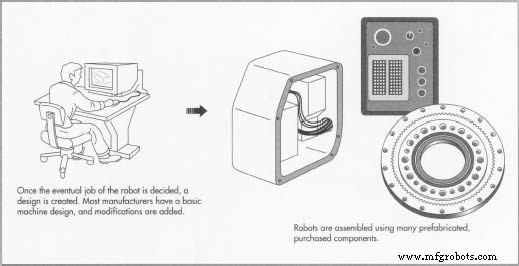
- 1 Каждый робот начинается с этапа проектирования. Эти и другие факторы должны быть учтены при проектировании:работа, которую необходимо выполнить; скорость работы; среда работы; задействованные опасные материалы; длина досягаемости; путь путешествия; переменные процесса; человеческое участие; возможности контроллера; и результат неудач.
Большинство производителей имеют базовую конструкцию машины, в которую они включают модификации и аксессуары для удовлетворения конкретных требований приложения.
 Первый робот, установленный в американской промышленности, этот Unimate "самовывоз" первый) удалил горячие металлические детали из машины для литья под давлением на заводе GM в Трентоне, штат Нью-Джерси, в 1961 году. (Из собраний Музея Генри Форда и Гринфилд-Виллидж.)
Первый робот, установленный в американской промышленности, этот Unimate "самовывоз" первый) удалил горячие металлические детали из машины для литья под давлением на заводе GM в Трентоне, штат Нью-Джерси, в 1961 году. (Из собраний Музея Генри Форда и Гринфилд-Виллидж.)
Роботы, как и любой другой инструмент, хороши настолько, насколько хороши люди, которые ими владеют. Они не могут выполнять работу, для которой они не были созданы или запрограммированы. Они наиболее эффективны, когда вся система и процессы тщательно спланированы. Кроме того, ответственные за них работники также должны быть полностью обучены и обучены.
В 1980-х годах корпорация General Motors потратила более 40 миллиардов долларов на новые технологии, многие сотни миллионов - на роботов. К сожалению, компания не потратила достаточно средств на понимание систем и процессов, которые роботы должны были революционизировать, или на людей, которые должны были их обслуживать и эксплуатировать. Завод GM в Хамтрамке, штат Мичиган, должен был стать витриной для компании. Вместо этого к 1988 году это было место одного из худших в технологическом утопизме. Роботы на линии иногда рисовали друг друга, а не проезжающие мимо машины; роботы время от времени выходили из-под контроля и врезались в проезжающие машины; было обнаружено, что робот, предназначенный для установки лобовых стекол, систематически их разбивал. Однажды, когда робот перестал работать, техники не знали, как это исправить. После поспешного звонка производителю на следующий самолет слетел технический специалист. Он посмотрел на робота, нажал кнопку «Сброс», и машина снова заработала.
Уильям С. Претцер
Изготовление
- 2 После проектирования изготавливаются основание, кронштейны, колонна и опоры. База
 обычно тяжелые, чтобы робот не опрокинулся. Его изготавливают методом литья или сварки, а затем подвергают механической обработке. Многие производители роботов используют роботов для сварки деталей для новых.
обычно тяжелые, чтобы робот не опрокинулся. Его изготавливают методом литья или сварки, а затем подвергают механической обработке. Многие производители роботов используют роботов для сварки деталей для новых. Те области, которые сопрягаются с остальной частью робота, обрабатываются с тщательным контролем размеров, чтобы гарантировать правильную подгонку и работу прикрепляемых компонентов. Точно так же основная колонна и рычаги сконструированы таким образом, чтобы точно вписаться в окончательную сборку.
Сборка
Роботы собираются с использованием значительного количества закупаемых компонентов, таких как электродвигатели, гидроцилиндры, подшипники, проводка, контроллеры и другие важные детали. Промышленный робот может содержать 2000 отдельных деталей и собирается бригадами. Эти команды начинают с базы и собирают компоненты в робота, пока он не будет готов и не будет готов для тестирования и завершения.
Чтобы начать процесс сборки, на мобильных роботах сначала устанавливаются тяговые двигатели, аккумуляторы, оси, колеса и шины. Стационарным роботам эти предметы не требуются. Они временно привинчиваются к полу для устойчивости во время сборки. Подвижные стойки и рычаги собираются вместе с соответствующими приводными двигателями, а затем прикрепляются к основанию. Основание содержит зубчатый венец, который приводится в действие электродвигателем для обеспечения вращательного движения. Он должен плотно прилегать к ведущей шестерне колонны. Упорные подшипники поддерживают вес колонны и рычагов на основании. Магнитная шкала окружает подшипник и обеспечивает электронную обратную связь с контроллером.
Ссылка
- 3 Следующий стык - это ссылка. Он действует как локоть и соединяет руку с основанием. Опора-стабилизатор обеспечивает позиционное управление звеном, позволяя ему двигаться по заданной траектории. Эти компоненты содержат опоры подшипников, к которым привинчиваются шарнирные валы. Каждый подшипник предварительно смазан или снабжен линией или фитингом для смазки. Связь содержит датчик положения, который подает другой сигнал положения на контроллер.
Взять
- 4 Плечо устанавливается на вертикальную часть звена. Он обеспечивает максимальную «досягаемость» робота и поддерживает запястье. Рука содержит приводные валы, которые приводят в движение запястье. Три двигателя или комбинация двигателей и гидроцилиндров
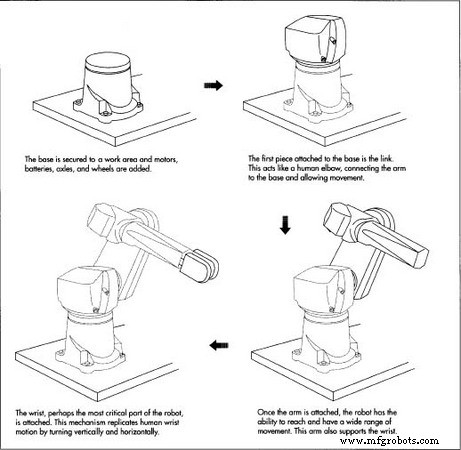 Промышленный робот может содержать 2000 отдельных деталей и собирается группами. Эти команды начинают с базы и собирают компоненты в робота, пока он не будет готов и не будет готов для тестирования и завершения. подключен к приводным валам. Поскольку рычаг и рычаг должны выдерживать всю нагрузку на запястье, это достигается с помощью больших подшипников и шарнирного пальца.
Промышленный робот может содержать 2000 отдельных деталей и собирается группами. Эти команды начинают с базы и собирают компоненты в робота, пока он не будет готов и не будет готов для тестирования и завершения. подключен к приводным валам. Поскольку рычаг и рычаг должны выдерживать всю нагрузку на запястье, это достигается с помощью больших подшипников и шарнирного пальца.
Запястье
- 5 Запястье - важнейший механизм робота. Это запястье, которое больше всего повторяет движения человека, поворачиваясь и поворачиваясь, чтобы установить малярный пистолет, сварочный аппарат или другой инструмент в правильное положение. У многих роботов также есть электроника измерения нагрузки на запястье, которая сигнализирует о столкновении с препятствием или о том, что груз слишком тяжел, чтобы его можно было безопасно поднять. Дополнительные датчики положения и электроника управления инструментом также установлены в руке и запястье.
Подключение к контроллеру
- 6 После завершения механической сборки можно закончить электромонтажные и водопроводные работы робота. Все
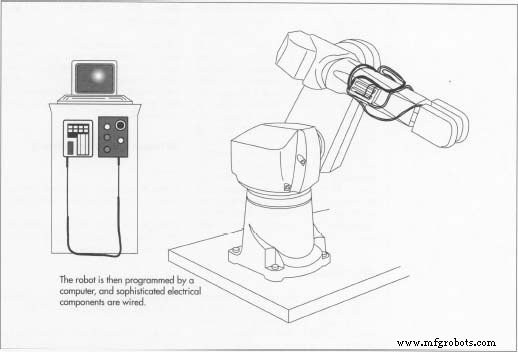 Датчики и электрические компоненты двигателя должны иметь провода для питания и передачи информации обратно на управляющий компьютер. Иногда неиспользуемое пространство в кронштейнах и основании обеспечивает удобное место для установки некоторых электронных компонентов контроллера, сокращая пути проводки. Гидравлические и воздушные цилиндры имеют шланги, которые работают под давлением и управляются клапанами в основании. Большинство этих проводов и шлангов подводятся обратно к шкафу контроллера, который для мобильных роботов прикреплен к основанию. Если робот неподвижен, этот контроллер обычно устанавливается на расстоянии нескольких футов и подключается пуповиной. После сборки руки и колонна робота иногда закрываются ограждениями и экранами, чтобы защитить их от брызг краски, искр при сварке или других опасностей в окружающей среде.
Датчики и электрические компоненты двигателя должны иметь провода для питания и передачи информации обратно на управляющий компьютер. Иногда неиспользуемое пространство в кронштейнах и основании обеспечивает удобное место для установки некоторых электронных компонентов контроллера, сокращая пути проводки. Гидравлические и воздушные цилиндры имеют шланги, которые работают под давлением и управляются клапанами в основании. Большинство этих проводов и шлангов подводятся обратно к шкафу контроллера, который для мобильных роботов прикреплен к основанию. Если робот неподвижен, этот контроллер обычно устанавливается на расстоянии нескольких футов и подключается пуповиной. После сборки руки и колонна робота иногда закрываются ограждениями и экранами, чтобы защитить их от брызг краски, искр при сварке или других опасностей в окружающей среде.
Установка
Установка происходит на сайте пользователя. Если / неподвижен, робот крепится к полу болтами. При движении в пол закапывается направляющая проволока, чтобы робот мог следовать от задачи к задаче. Он следует за проводом по радиосигналам, а также использует провод для связи с центральным контроллером. В последнее время для устранения проволоки стали применять лазеры. По его пути робот направляется лазерным лучом, отражающимся от стен. Некоторые конструкции также включают видеокамеры. Стационарные приложения обычно требуют, чтобы вокруг робота были сооружены заборы, чтобы ничего не подозревающий человек не зашел в рабочую зону робота и не получил травму. После установки производитель робота обычно проводит для клиента обучение эксплуатации и техническому обслуживанию.
Контроль качества
Тестирование состоит из двух частей:функциональной точности и процесса, известного как «приработка». Как только собранный робот получает питание, компьютерная программа дает команду контроллеру переместить манипулятор робота через серию движений. Сделаны точные записи этих движений, любые проблемы исправлены. Затем робот запускается непрерывно в течение нескольких часов. Это называется прожиганием и выполняет две функции. Во-первых, любую потерю точности можно обнаружить с помощью данных функционального теста. Такой случай может указывать на конструктивную проблему, неплотную сборку, дефектный подшипник и т.п. Во-вторых, во время пробного запуска электроника и гидравлическая система нагреваются до рабочей температуры. Это важно, потому что контроллер запрограммирован с поправочными коэффициентами, называемыми смещениями. Эти смещения компенсируют обратную связь от датчиков положения, чтобы учесть изменение температуры компонентов. Когда машина прогрета, программист может ввести поправочные коэффициенты в программу для обеспечения оптимальной производительности.
Будущее
Робототехника - один из самых быстрорастущих сегментов рынка промышленного оборудования. В основном благодаря достижениям в компьютерных технологиях старые роботы быстро устаревают новыми моделями. Японские фирмы возглавляют разработку робототехники, и многие из их проектов включают новую науку об искусственном интеллекте, которая позволяет роботам «учиться» и «адаптировать» свои операции самостоятельно.
Достижения в области камер и электронного видения также повлияют на роботов в 1990-х годах. Многие роботы войдут в новые области использования, такие как медицина и общественное питание, что позволит контактировать с ними больше людей, чем раньше на промышленных предприятиях.
Производственный процесс
- Какие промышленные роботы для покраски работают лучше всего?
- Что сдерживает интеграцию промышленных роботов?
- Профилактическое обслуживание промышленных роботов
- Промышленные роботы в автомобильной промышленности
- Ручные направляющие роботы
- 5 аспектов роботов-помощников в области здравоохранения
- Промышленная робототехника 21 века.
- Быстро развертываемые роботы для совместной работы
- Введение в коллаборативных роботов
- Современные промышленные роботы