


Шестиосевой робот Micro-Automation
Сколько места вам нужно для шестиосевого робота Micro-Automation?
Если вы собираетесь использовать шестиосевой манипулятор с микроавтоматизацией, такой как Meca500 от Mecademic, который используется в этом руководстве в качестве примера, вас, скорее всего, интересует позиционирование и ориентация инструмента робота (конечного эффектора). ) в
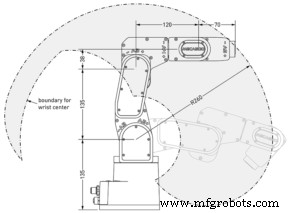 в разных местах. Поэтому вам наверняка захочется узнать набор мест, до которых вы можете добраться с помощью определенного рабочего органа, установленного на определенном шестиосевом манипуляторе робота. Вы, вероятно, попросите какую-нибудь диаграмму, показывающую «рабочую область», «рабочий объем», «рабочий диапазон» или «рабочий диапазон» робота. И, к сожалению, вам часто будут предлагать упрощенную диаграмму, подобную той, что показана здесь, или, что еще хуже, с так называемым охватом. робота.
в разных местах. Поэтому вам наверняка захочется узнать набор мест, до которых вы можете добраться с помощью определенного рабочего органа, установленного на определенном шестиосевом манипуляторе робота. Вы, вероятно, попросите какую-нибудь диаграмму, показывающую «рабочую область», «рабочий объем», «рабочий диапазон» или «рабочий диапазон» робота. И, к сожалению, вам часто будут предлагать упрощенную диаграмму, подобную той, что показана здесь, или, что еще хуже, с так называемым охватом. робота.В робототехнике правильным термином для того, что вы ищете, является рабочее пространство . Досягаемость — это не что иное, как максимальное расстояние между центром запястья робота (точка пересечения осей трех последних суставов робота) и оси сустава 1. Серая область на рисунке выше — это площадь, достижимая центром запястья при заданном вращении сустава 1. Эта область, или даже объем, охватываемый вращением этой области вокруг оси сустава 1, не является рабочим пространством робота. Нет абсолютно никакой гарантии, что вы сможете достичь позиции в этом объеме с помощью всплывающей подсказки определенного конечного эффектора, не говоря уже о том, чтобы достичь этой позиции с любой ориентацией. На самом деле, если вы установите относительно длинный рабочий орган, вы не сможете добраться до любой точки из этого объема кончиком вашего инструмента.
Рабочее пространство микроавтоматического шестиосевого робота — это набор всех поз (положений и ориентаций), доступных конкретному исполнительному органу, установленному на этом роботе. Таким образом, (1) никто не может сказать вам, каково рабочее пространство конкретного шестиосевого манипулятора, если вы не укажете, какой рабочий орган вы собираетесь использовать, и (2) это рабочее пространство является шестимерным объектом. это вообще невозможно представить графически.
Конечно, есть несколько исключений в области робототехники, когда дело доходит до графического представления. Рабочую область шестиосевого декартова робота, такого как показанный ниже, описать тривиально, но только для одного конкретного выбора всплывающей подсказки. Действительно, если подсказка рабочего органа робота совпадает с точкой пересечения осей трех вращающихся шарниров, то этот шестиосевой микроавтоматизированный робот может расположить свою подсказку в любом месте внутри желтого прямоугольного параллелепипеда при абсолютно любой ориентации инструмента.
Увы, подавляющее большинство шестиосных промышленных роботов не декартовы по разным практическим причинам. Например, показанный выше декартовский робот имеет очень маленькое рабочее пространство с точки зрения позиционирования. Типичный шестиосевой манипулятор, который часто странно называют роботом с вертикальным шарниром. , состоит из семи звеньев (тел), соединенных последовательно через шесть приводных шарниров. Первое из этих тел — это основание робота, а последнее — его фланец. (также называется механический интерфейс ). Кроме того, ось первого сустава вертикальна, оси суставов 2 и 3 горизонтальны, ось сустава 4 перпендикулярна оси сустава 3, а оси последних трех суставов обычно пересекаются в одной точке.
В то время как манипуляторы промышленных роботов обычно продаются без каких-либо инструментов, к фланцу робота в конечном итоге прикрепляется рабочий орган (например, захват или сенсорный датчик). Затем пользователь должен связать эталонный кадр инструмента. , прикрепленный к этому исполнительному органу. Эта система отсчета инструмента определяется по отношению к системе отсчета фланца. . Исходная точка системы отсчета инструмента называется TCP. (центральная точка инструмента ). В конечном итоге вас должен интересовать набор поз по отношению к базовой системе отсчета робота. , где робот может привести конкретную систему отсчета инструмента. Таким образом, рабочее пространство робота представляет собой набор поз, которые могут быть достигнуты с помощью системы отсчета инструмента робота. В TCP диапазон достижимых ориентаций инструмента совершенно другой из-за механических помех, ограничений по соединениям и ограничений по длине звеньев. Помимо тесной связи между возможностями позиционирования и ориентации типичных шестиосевых роботов-манипуляторов, у этих роботов есть так называемые особенности. . В сингулярности робот не может двигаться в определенных направлениях. Это физическая блокировка, а не какая-то математическая задача, и абсолютно все микроавтоматизированные шестиосевые роботы-манипуляторы (включая показанную выше декартову) имеют особенности. Например, когда все шарниры в Meca500 находятся под нулевым углом, как на левом рисунке ниже, рабочий орган робота не может двигаться по линии, параллельной основанию y -ось (зеленая). Чтобы двигаться по этой линии, суставы 4 и 6 должны сначала повернуться на ±90° (в противоположных направлениях).
Сингулярности — очень важное явление (или, скорее, неприятность) в робототехнике, и им будет посвящен отдельный урок. Здесь достаточно сказать, что даже если траектория находится внутри рабочей области робота, как в примере выше, система отсчета инструмента робота может не иметь возможности следовать по ней непрерывно (т. е. без пауз в движении ТКП) , из-за сингулярностей.
Таким образом, сингулярности роботов еще больше ограничивают используемые части рабочего пространства робота. Фактически, рабочее пространство типичного шестиосевого манипулятора микроавтоматизации представляет собой комбинацию нескольких свободных от сингулярностей подмножеств рабочего пространства, разделенных сингулярностями. Робот может перемещаться в любом месте в пределах всего рабочего пространства в совместном режиме, но только в одном из подмножеств свободного от сингулярности рабочего пространства в декартовом режиме (т. е. когда его TCP непрерывно следует определенному пути).
Каждое из этих свободных от сингулярности подмножеств рабочего пространства соответствует определенной конфигурации робота. Эта тема будет рассмотрена в следующем уроке по особенностям роботов. На данный момент обратите внимание, что если данная поза кажется недоступной с текущей конфигурацией робота, она может быть доступна с другой конфигурацией. Например, положение системы отсчета инструмента на рисунке ниже может быть достигнуто только в одной из восьми конфигураций робота. Тем не менее, распространенной ошибкой является рассмотрение только одного из подмножеств свободного от сингулярности рабочего пространства вместо всего рабочего пространства (т. е. работа только в одном из восьми режимов конфигурации). Обратите внимание, что если вы укажете позу с помощью x , г , г координаты и углы Эйлера, а затем используйте команду MovePose, робот автоматически найдет наилучшую конфигурацию. Однако, к сожалению, пользователи обычно учат позиции робота бегом трусцой, а не задавая позу.
Часто у пользователя уже есть набор поз конечного эффектора, которые нужно достичь для данного приложения. Например, заготовка должна быть снята с конвейера, затем представлена перед камерой в различных ориентациях и, наконец, помещена на другой конвейер. Поиск оптимального места для камеры, оптимальной установки захвата и оптимальной конструкции пальцев далеко не тривиален. К сожалению, на данный момент нет коммерчески доступной автоматической процедуры поиска оптимальной конструкции ячейки — единственный метод — метод проб и ошибок. К счастью, для этого вам не нужно иметь настоящую настройку; вы можете использовать программное обеспечение для моделирования, такое как RoboDK. Тем не менее, вам все еще нужны некоторые навыки робототехники, иначе вы можете потратить много усилий на пробы и ошибки. Таким образом, далее мы дадим вам десять рекомендаций, как наилучшим образом использовать рабочее пространство вашего робота. Хотя в качестве примера мы используем наш Meca500, эти рекомендации применимы к любому типичному шестиосевому роботу-манипулятору с микроавтоматизацией.
Рекомендация 1: Разместите TCP как можно ближе к фланцу робота
При осмотре довольно часто приходится предъявлять деталь перед камерой с большим диапазоном ориентаций. В таком приложении первое эмпирическое правило заключается в размещении системы отсчета инструмента как можно ближе к системе отсчета фланца. Другими словами, вы должны спроектировать систему захвата, которая позволит вам захватывать проверяемую деталь как можно ближе к фланцу робота.
Обратите внимание, что мы поставляем наш дополнительный электрический захват с переходной пластиной, которая позволяет вам прикреплять захват, как показано выше. Тем не менее, для некоторых приложений может быть лучше сконструировать собственную переходную пластину, чтобы либо прикрепить захват таким образом, чтобы пальцы и ось шарнира 6 находились в одной плоскости, либо прикрепить захват вдоль оси шарнира 6 ( как в этом видео). Другой альтернативой может быть использование L-образных пальцев.
Рекомендация 2: Не двигайтесь в декартовом режиме, если только не следуете пути
При контроле вам часто нужно повернуть деталь в разные стороны. Конечно, в этих случаях гораздо проще использовать команду MoveLinRelTRF или запустить робота в декартовом режиме. Однако оба подхода терпят неудачу, если вдоль вращения присутствует сингулярность, как в примере, показанном на рисунке ниже. В этом примере вы не можете вращать рабочий орган вокруг его y -ось (зеленая) под углом 90° из-за сингулярности (оси шарниров 4 и 6 выровнены).
Поэтому вы должны научиться использовать углы Эйлера и вместо этого использовать команду MovePose. Кроме того, вы можете использовать RoboDK. Так как RoboDK является симулятором, он позволяет проходить сингулярности в декартовом режиме пробежки. Независимо от сингулярностей всегда используйте команды MovePose или MoveJoints, если только вы не хотите, чтобы ваш TCP следовал по определенному пути. Использование этих команд обычно приводит к сокращению времени цикла.
Рекомендация 3: Если кабель слишком сильно сдерживает соединение 6, выровняйте оси соединений 1, 4 и 6
Хотя соединение 6 механически не ограничено, если вы используете рабочий орган с прикрепленным кабелем, как наш захват, диапазон соединения 6 будет ограничен примерно ±180° или даже меньше. Если вам нужен больший диапазон, вы можете выровнять оси суставов 4 и 6 или даже суставов 1, 4 и 6. Конечно, такая конфигурация будет единственной, поэтому вам нужно будет использовать команду MoveJoints, чтобы вращаться вокруг этих совпадающие оси
Рекомендация 4: Если вы используете рабочий орган с кабелем, держите шарнир 6 как можно ближе к нулю градусов
По возможности, в желаемом положении старайтесь держать шарнир 6 как можно ближе к нулю градусов. Если, например, вы захватите заготовку в положении робота, где шарнир 6 находится под углом 170°, а затем выполните команду MovePose, шарнир 6, скорее всего, будет сильно вращаться. Например, если в новой желаемой позе шарнир 6 может быть повернут на 190°, робот автоматически повернет свой последний шарнир на 340° в отрицательном направлении (а не на 20° в положительном направлении).
Правило 5: Если вам нужно много сориентироваться, расположите ЦТИ на оси сустава 1
Если вам нужно охватить широкий диапазон ориентаций, вам необходимо расположить ЦТИ на оси сустава 1. Такая конфигурация позволит вращаться на ±175° вокруг оси сустава 1 и ±180 ° вокруг оси сустава 6. Чем дальше центр запястья робота от сустава 1, тем меньше ориентационные возможности робота.
Рекомендация 6: Попробуйте все конфигурации робота
Иногда робот будет слишком близок к сингулярности в одном или нескольких положениях рабочего органа, которые должны быть достигнуты. В приложении для проверки это может не быть проблемой, но если вам нужно выбрать или поместить объект, вам, скорее всего, потребуется прийти в конечную позу и выйти из нее в линейном режиме. В таком случае протестируйте все возможные конфигурации роботов и выберите ту, которая наиболее далека от сингулярностей. Например, на рисунке ниже левая конфигурация слишком близка к сингулярности (оси 4 и 6 почти совмещены), а правая достаточно далеко от сингулярности.
Рекомендация 7: Думайте не только о достижимости
Как мы уже упоминали, рабочее пространство микроавтоматизированного шестиосевого робота-манипулятора представляет собой набор из нескольких подмножеств рабочих пространств, разделенных сингулярностями. Кроме того, не все достижимые позы одинаково «хороши». Действительно, рабочее пространство манипулятора с шестью осями весьма неоднородно с точки зрения таких критериев производительности, как скорость и точность. Мы уже упоминали, что вам нужно быть как можно дальше от сингулярностей при движении в декартовом режиме. Кроме того, чем сильнее растянута рука робота, тем меньше ее точность (более гибкая) и тем больше времени требуется для подавления вибраций на кончике инструмента.
Рекомендация 8: Воспользуйтесь избыточностью робота, если вам не нужны шесть степеней свободы
Во многих случаях вам нужно всего пять степеней свободы. Например, если вашим конечным рабочим органом является клеевой дозатор или шпиндель, вам, вероятно, все равно, ориентировать его относительно оси иглы или вала соответственно. Кроме того, если вы проверяете заготовку с помощью осесимметричного датчика, такого как камера, во многих случаях вы можете представить заготовку при любом вращении вокруг оси датчика. В этих случаях не выравнивайте ось шарнира 6 с осью симметрии вашего инструмента или датчика и выбирайте лучшее из бесконечного множества положений робота для каждой позы, которая должна быть достигнута. Наилучший означает далекий от сингулярностей, но также наиболее близкий к предыдущей и последующей позам, которые необходимо достичь.
Рекомендация 9: Зафиксируйте робота в вертикальном положении, если в этом нет крайней необходимости
Как и большинство промышленных роботов, Meca500 можно закрепить в любом положении (например, вверх ногами или на стене). Единственная проблема с любым невертикальным креплением заключается в том, что вам нужно очень прочное крепление, которое может сделать вашу камеру более громоздкой и дорогой. Поэтому выбирайте невертикальные приспособления только после того, как попробуете зафиксировать робота вертикально.
Рекомендация 10: Семь раз отмерь, один раз отрежь
Английская поговорка гласит:«Семь раз отмерь, один раз отрежь», но когда дело доходит до конструкции робота, выбирайте русскую версию «Семь раз отмерь, один раз отрежь». Если ваша ячейка относительно сложна или рабочее пространство вашего робота кажется ограниченным, вы должны использовать пакет моделирования роботов и выполнить множество итераций проектирования, пока не найдете удовлетворительное решение. Однако не стоит полностью полагаться на симуляцию. Общий пакет моделирования, такой как RoboDK, не имитирует точное поведение робота. Например, конкретное линейное движение может быть выполнено в RoboDK, но невозможно на реальном роботе из-за сингулярностей. Следовательно, вы также должны опробовать свою программу на реальном роботе.
В заключение, если ваше приложение не включает только несколько повторяющихся движений, вы должны полностью понимать рабочее пространство вашего робота и потратить значительное время на проектирование своей роботизированной ячейки. Конструкция роботизированной ячейки — это не только способность выполнять все движения робота, но и оптимизация времени цикла и других критериев производительности (точность, потребление энергии).
Система управления автоматикой
- Промышленный робот
- Робот-бокс для компакт-дисков Raspberry Pi
- Робот с подвижной сигнализацией
- Робот для открытия резюме
- Робот ROS
- «Художественный» робот в NPE
- Захваты для роботов, собранные в США
- Автоматизация:переработка линии роботов
- 3-осевой фрезерный станок с ЧПУ VS 4-осевой фрезерный станок с ЧПУ
- Что такое робот для напитков?