


Эффективный алгоритм оптимизации ортогональных переменных для систем связи
В этой статье обсуждается алгоритм поиска оптимальной скорректированной точки в двумерном пространстве с ортогональными входными векторами. Алгоритм решает уравнения для пересекающихся кругов на основе измеренных точек данных.
Несколько ключевых показателей производительности системы определяются ортогональными входными параметрами, соответствующими амплитуде и фазе; двумя примерами являются сквозной проход несущей квадратурного модулятора и подавление боковой полосы. Эти параметры улучшаются за счет оптимизации баланса смещения постоянного тока и баланса амплитуды и фазы между квадратурными входами основной полосы модулятора.
Поскольку поиск оптимальной настройки этих параметров - нетривиальная задача для двумерного пространства, в этой статье я расскажу об алгоритме Python для поиска оптимальной настроенной точки в двумерном пространстве с ортогональными входными векторами. Алгоритм решает уравнения для пересекающихся кругов на основе измеренных точек данных и находит оптимальную точку всего за четыре итерации. Чтобы проиллюстрировать эту технику, я использовал интегрированный цифро-аналоговый преобразователь (ЦАП) AFE7070 компании Texas Instruments (TI) плюс параметр сквозного прохождения несущей квадратурного модулятора.
Оптимизация побочных выбросов
Системы связи стремятся минимизировать побочные излучения. Некоторые из этих побочных излучений возникают из-за несовпадения ортогональных входных сигналов. Например, рассогласование смещения постоянного тока и асимметрия амплитуды / фазы будут влиять на параметры прохождения несущей и подавления боковой полосы соответственно в аналоговых квадратурных модуляторах. Настройка входных переменных на оптимальную уставку сводит к минимуму паразитный выходной сигнал.
На рисунке 1 измеренный параметр представлен как величина (r) вектора от оптимизированной точки [x0, y0] до фактической точки на двумерной плоскости. Значение параметра ограничено единичным кругом [0,1]. 0 означает полную отмену или отсутствие сигнала, а 1 означает отсутствие отмены или полный сигнал. В децибелах функция ограничена [-inf, 0]. Круг радиуса r представляет все возможные точки x, y, которые достигают одинаковой величины.
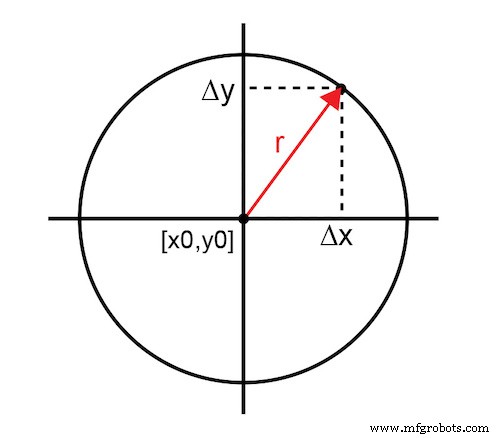
Рисунок 1. Вектор от оптимизированной точки до фактической
Уравнение 1 представляет функцию в простейшей форме:
 (1)
(1)
Константы [a0, b0] представляют зависящие от системы коэффициенты нормализации, чтобы максимальный результат оставался меньше 1. Технически уравнение 1 описывает эллипс, поскольку коэффициенты масштабирования для каждой независимой переменной не обязательно должны быть одинаковыми. Для простоты анализа, a0 равно b0, так что кривые действительно представляют собой круги.
Цель состоит в том, чтобы найти оптимальную точку [x0, y0], которая минимизирует параметр измерения (r) как можно быстрее. Эффективное определение этой точки при статистически изменяющихся входных параметрах является сложной задачей. Традиционный подход «охота и клевание» использует последовательные попытки, чтобы сузить круг до оптимальной точки. Хотя это дает желаемое решение, требуется слишком много итераций, когда время сходимости критично, что требует нового метода.
Пересекающиеся круги
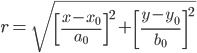
В идеале ровно три итерации измерения с использованием пересекающихся кругов определяют оптимальную точку. Первый результат измерения в произвольной входной точке [x1, y1] определяет бесконечные возможности для оптимальной точки, представленной окружностью A радиуса r1. Добавление второй точки данных дает еще один бесконечный набор данных, представленный кружком B; однако пересечения двух кругов сужают решение до двух точек. Третья точка данных и соответствующий круг C образуют третью кривую, где есть только одна точка взаимного пересечения. Эта точка пересечения - оптимальная точка. На рисунке 2 показана последовательность пересекающихся кругов, которые приводят к окончательной оптимальной точке.
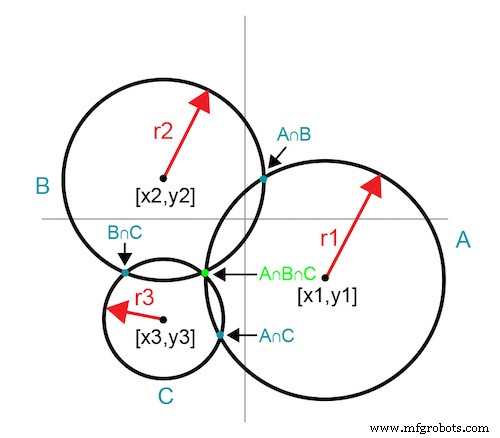
Рисунок 2. Пересекающиеся круги показывают общую точку пересечения
Этот метод позволяет выявить оптимальную точку ровно за три итерации. На четвертой итерации измеряется оптимальная точка для подтверждения и документирования результата.
На рисунке 3 показан метод исключения одной итерации с использованием эмпирически известной информации о границах в плоскости x-y. Выберите начальную точку в одной из граничных точек так, чтобы первая кривая (A) представляла собой дугу под углом 90 градусов. Выберите вторую точку на первой дуге, двигаясь в направлении x или y.
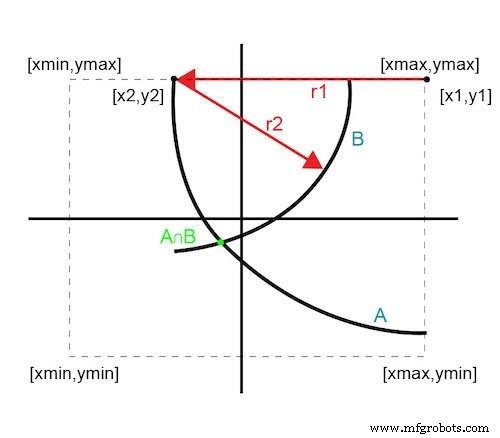
Рисунок 3. Двухэтапное решение
Поскольку вторая точка все еще находится на краю границы, ее кривая представляет собой дугу под углом 180 градусов. Пересечение этих двух кривых дает единственную оптимальную точку. Такой подход позволяет выявить оптимальную точку всего за две итерации и подтвердить ее тремя.
Последовательное приближение окружности
Оптимальное решение зависит от точности математического уравнения. В реальной ситуации измерения несколько предположений или ошибок будут влиять на результаты. Измеряемые сигналы очень малы; шум и допуски измерения вносят ошибки. Использование идеальных кругов вместо эллипсов вносит некоторую неопределенность. Допущения коэффициента масштабирования, необходимые для решения нескольких уравнений, также вносят неопределенность. Эти ошибки и предположения приводят к нечеткости кривых.
На рисунке 4 показано, как нечеткие кривые не гарантируют точную точку пересечения; вместо этого они определяют область конвергенции.
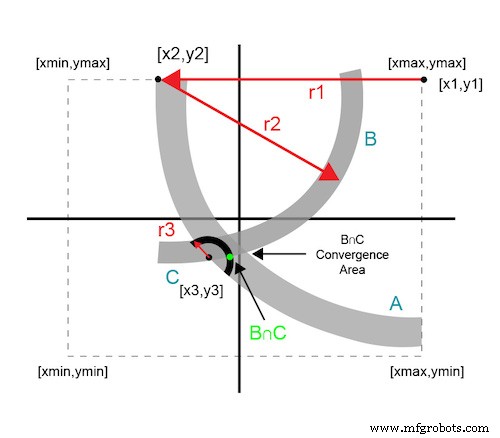
Рисунок 4. Приближение последовательного пересечения окружностей
Каждая дополнительная точка данных использует данные из предыдущей итерации. Последовательные круги сходятся к области решения, которая находится в пределах минимального порога системы.
Пример измерения
В примере используется ЦАП AFE7070 и оптимизируется параметр сквозной передачи несущей. AFE7070 - удобная платформа, так как ЦАП и модулятор интегрированы. Дисбаланс смещения постоянного тока на квадратурных входах модулятора определяет характеристики прохождения несущей. AFE7070 имеет внутреннюю цифровую настройку для точного управления балансом смещения постоянного тока. Это не займет много времени; разрешение в микровольтах.
Параметры x, y для примера представляют собой целочисленные цифровые значения шага, которые управляют уровнем постоянного тока на квадратурных входах. Предыдущая статистическая выборка устройства предоставила границы x, y входных переменных, а также пошаговые таблицы, используемые в расчетах. Таблицы шагов обеспечивают «преобразование» измеренного проходного тока несущей в децибелах милливаттах в коэффициент дельта-х (или дельта-у).
Высокое (или, другими словами, плохое) измеренное значение означает, что настройка далека от истины и для достижения оптимальной точки требуется большая дельта. И наоборот, низкое значение означает, что уставка близка и требует небольшой корректировки. Эта небольшая «домашняя работа» необходима, чтобы гарантировать, что начальные точки предположения не слишком далеко, и сократить время итерации до минимума.
На рисунке 5 показан алгоритм Python, который находит оптимальные входные переменные за четыре или менее итераций.
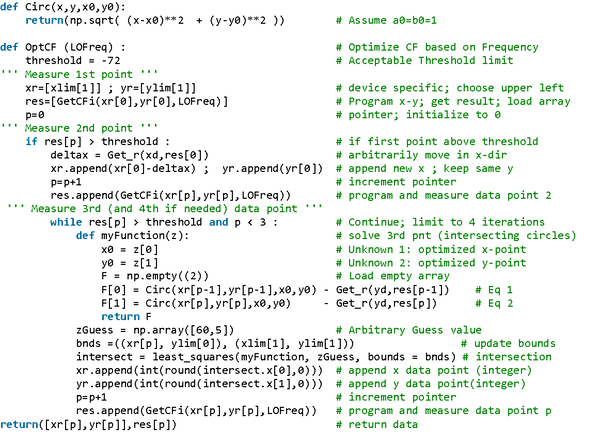
Рисунок 5. Алгоритм оптимизации Python
Функции «Get_r» и «GetCFi» являются измерениями, зависящими от устройства. Я опустил код для краткости, так как он несущественен для демонстрации алгоритма оптимизации. В ваших приложениях эти функции имеют отношение к программированию и измерению параметров устройства в вашей системе.
Заключение
Для ЦАП AFE7070 в большинстве случаев алгоритм оптимизирует прохождение несущей в течение трех итераций и менее 1,7 с, стробируемых в основном за счет времени установления и развертки анализатора спектра. Для выполнения методов предыдущего шага потребовалось около 20 итераций и более 20 секунд. Этот алгоритм обеспечивает повышение скорости более чем в 10 раз по сравнению с традиционным подходом. Другие параметры системы связи, зависящие от ортогональных входных переменных усиления и фазы, также могут использовать этот алгоритм для эффективного поиска оптимального решения.
Отраслевые статьи - это форма контента, позволяющая отраслевым партнерам делиться полезными новостями, сообщениями и технологиями с читателями All About Circuits, что не подходит для редакционного контента. Все отраслевые статьи подлежат строгим редакционным правилам с целью предлагать читателям полезные новости, технические знания или истории. Точки зрения и мнения, выраженные в отраслевых статьях, принадлежат партнеру, а не обязательно All About Circuits или ее авторам.
Промышленный робот
- Таксономия для IIoT
- Создание гибких производственных систем для Industrie 4.0
- Переосмысление ERP-систем в современном производстве для будущего роста
- Преимущества использования Robotic Vision для приложений автоматизации
- Предприятия устанавливают сроки для интеллектуальных систем
- 10 лучших рабочих процессов для производителей
- 10 идей для повышения эффективности и производительности складских операций
- Сбор полевых данных для оптимизации процесса
- Поворотный момент для роботизированной автоматизации
- Установление базового уровня системы для оптимальной производительности