


Минимизация шума и вибрации шагового двигателя в приложениях для точного управления движением
Шаговые двигатели хорошо работают в широком диапазоне приложений, но могут бороться с проблемами пульсации крутящего момента и искажений тока. Узнайте о QuietStep, запатентованном алгоритме от Allegro MicroSystems, как о возможном решении.
Шаговые двигатели обладают уникальными преимуществами по сравнению с двигателями постоянного тока (DC) и бесщеточными двигателями постоянного тока (BLDC) во многих областях применения. Биполярный шаговый двигатель обеспечивает точное положение разомкнутого контура, а также крутящий момент при нулевой скорости без использования контура управления или внешних датчиков. Благодаря своим управляемым шаговым возможностям шаговые двигатели хорошо работают в широком диапазоне приложений точного управления движением, включая телевизоры с замкнутой схемой (CCTV), 3D-принтеры, компьютерное числовое управление (ЧПУ), оборудование для производства текстиля и машины для захвата и размещения.
Успешное развертывание шаговых двигателей требует эффективного управления шумом и вибрацией. Например, в приложениях видеонаблюдения вибрация передается непосредственно на датчик изображения и подвес. Большой зум в сочетании с движением может исказить изображение. При 3D-печати резонанс двигателя или перерегулирование, вызванное высокой пульсацией крутящего момента, может привести к множеству нежелательных артефактов печати. В большинстве случаев снижение вибрации двигателя приводит к лучшему качеству изображения или более точной 3D-печати. Снижение вибрации двигателя также обеспечивает более тихую работу в целом.
Теперь доступны передовые технологии, основанные на запатентованных алгоритмах, для минимизации шума и вибрации в конструкциях шаговых двигателей за счет уменьшения пульсаций крутящего момента и искажений тока. Прежде чем углубляться в эти решения для управления движением, полезно понять, что вызывает вибрацию и, в свою очередь, слышимый шум. Во-первых, давайте подробнее рассмотрим, как работает шаговый двигатель.
Основы степпера
Биполярный шаговый двигатель - это двигатель постоянного тока с дискретными положениями полюсов, состоящий из нескольких катушек, расположенных в двух группах, называемых фазами. Соотношение тока между двумя фазами определяет положение ротора между двумя обмотками. Таким образом, шаговый двигатель может делить свое положение между двумя полюсами на меньшие приращения, называемые микрошагами.
Ток в каждой обмотке шагового двигателя можно суммировать, чтобы создать вектор, где величина вектора является крутящим моментом. Изучая ток в каждой из двух фаз в полярном пространстве, мы можем визуализировать вектор, как он вращается в каждом электрическом цикле.
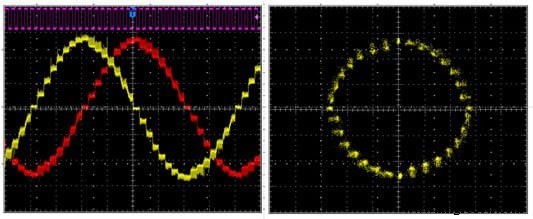
Рисунок 1. Фазный ток в каждой из двух обмоток биполярного шагового двигателя с шагом 1/8 (слева). Фазный ток в каждой из двух обмоток биполярного шагового двигателя с шагом 1/8, но представлен в полярной области (справа).
Во временной области (рис. 1 слева) крутящий момент определяется как сумма площадей под двумя кривыми. В полярной области (рис. 1 справа) величина вектора - это крутящий момент. На этих изображениях мы можем видеть, что крутящий момент постоянен, поскольку поле проходит через каждый электрический цикл. Когда крутящий момент непостоянен, система испытывает вибрацию и слышимый шум.
Если предположить, что двигатель не работает в резонансе, пульсация крутящего момента становится самым большим источником слышимого шума и вибрации в шаговом двигателе.
Управление шаговым двигателем (контроль тока)
Управление током с широтно-импульсной модуляцией (ШИМ) является наиболее распространенным способом управления шаговым двигателем. Осуществляя управление током, контроллер PWM прерывает выходной сигнал, ограничивая ток в каждой обмотке, чтобы поддерживать коэффициент, определяющий положение ротора.
Природа управления током PWM приводит к пульсации тока на основе применяемого рабочего цикла, индуктивности двигателя и напряжения на нем. Чтобы свести к минимуму пульсации, контроллер может управлять уменьшением тока в обмотках, реализуя различные режимы затухания.
Давайте рассмотрим общие режимы затухания для одного цикла ШИМ, начиная с нарастания тока возбуждения.
После привода, показанного на фиг. 2A, режим затухания реализуется во время отключения ШИМ с помощью двух синхронных методов, показанных на фиг. 2B и 2C.
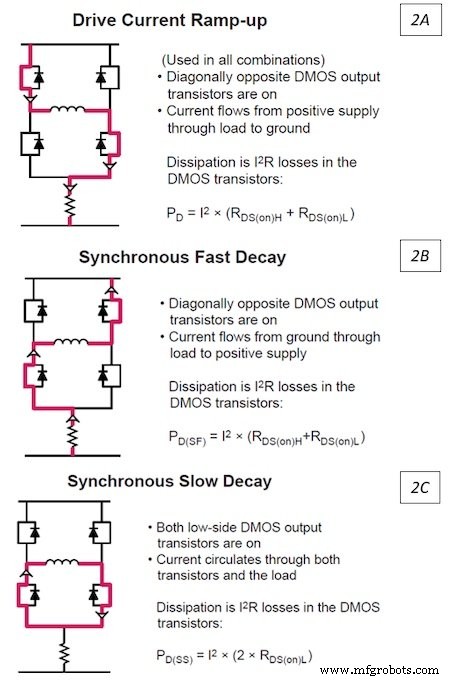
Рисунок 2. Текущий путь в режиме полного моста с указанием режимов движения и затухания.
Быстрое затухание обеспечивает оптимальный контроль тока, но приводит к высокой пульсации. Медленное затухание приводит к низкой пульсации, но скорость затухания зависит от обратной электродвижущей силы двигателя (BEMF), которая в некоторых случаях может создавать искажения тока.
На рисунке 3A показано, что может произойти при использовании 100-процентного медленного затухания. Когда ток в обмотке падает, медленное затухание не может уменьшить ток достаточно быстро, вызывая искажения на спадающем фронте. На рисунке 3B показаны эффекты использования 100-процентного быстрого распада. Пульсации тока намного больше, но контроллер поддерживает точное управление током.
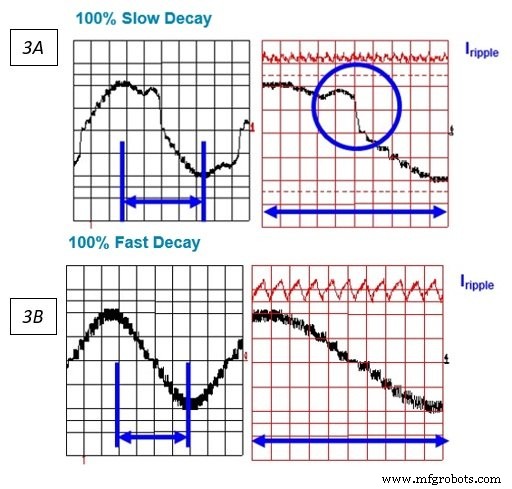
Рисунок 3A. Медленное затухание может привести к искажениям при уменьшении тока в нагрузке.
Рисунок 3B. Быстрое затухание вызывает сильную пульсацию тока, которая может привести к вибрации и звуковому шуму.
Мы можем избежать эффектов, показанных на рисунке 1, а также поддерживать приемлемый ток пульсаций, достигнув компромисса. Когда ток в нагрузке уменьшается, драйвер реализует комбинацию быстрого и медленного затухания, известную как смешанное затухание. Время отключения делится на часть быстрого спада и часть медленного спада, как показано на рисунке 4. Когда ток в нагрузке увеличивается, медленное затухание минимизирует пульсации.
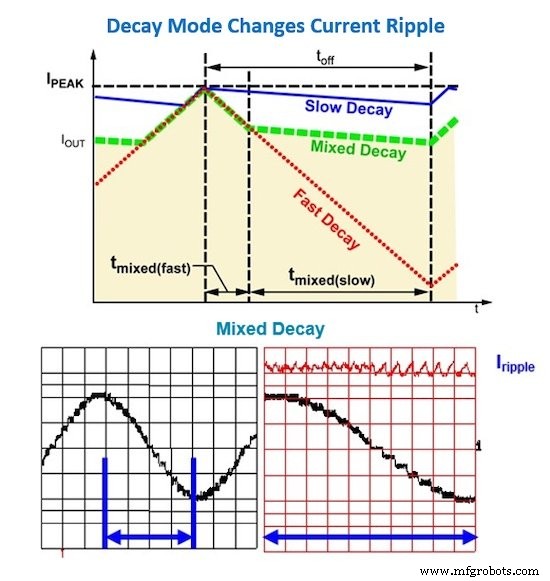
Рисунок 4. Смешанный распад сводит к минимуму пульсации, сохраняя при этом контроль над током в обмотке.
В зависимости от характеристик шагового двигателя и его постоянной времени LR, медленное затухание на переднем фронте может создавать проблемы при низких токах, когда скорость изменения тока слишком высока, чтобы ШИМ-контроллер мог регулировать низкие токи из-за гашения усилителя считывания тока. Этот сценарий может привести к искажению тока при увеличении тока в нагрузке, как показано на рисунке 5.
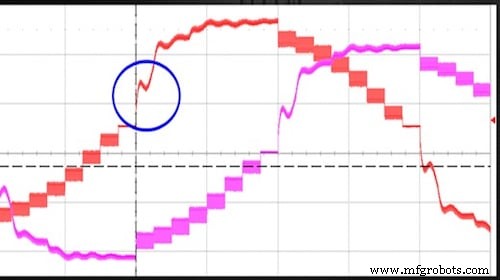
Рисунок 5. Медленное затухание нарастающего фронта может вызвать искажения в двигателях с определенными характеристиками LR.
Трудно найти простой компромисс, который подходит для всех биполярных шаговых двигателей. Чтобы решить эти проблемы при сохранении минимально возможной пульсации, система должна адаптироваться к различным характеристикам двигателя.
Новый подход к снижению пульсации крутящего момента
Allegro представила способ уменьшить пульсации крутящего момента и искажения тока для приложений с шаговыми двигателями. Эта инновация, получившая название QuietStep, теперь доступна в качестве опции для последнего драйвера шагового двигателя Allegro A5984.
Технология QuietStep использует запатентованный алгоритм, который динамически регулирует (вверх или вниз) процент быстрого распада, необходимый для каждого цикла, для достижения наилучшей производительности во всех рабочих условиях без использования сложного программного обеспечения.
Алгоритм изменяет традиционный подход к смешанному распаду, реализуя сначала медленный распад, а затем быстрый распад. На рис. 6А показан традиционный смешанный затухание с фиксированной частью быстрого и медленного затухания и с быстрым затуханием, начиная с временного цикла ШИМ. На рис. 6B показано, как начинается медленное затухание при использовании QuietStep в начале цикла отключения ШИМ. QuietStep автоматически регулирует соотношение быстрого и медленного затухания, чтобы минимизировать пульсации тока, сохраняя при этом точное регулирование тока.
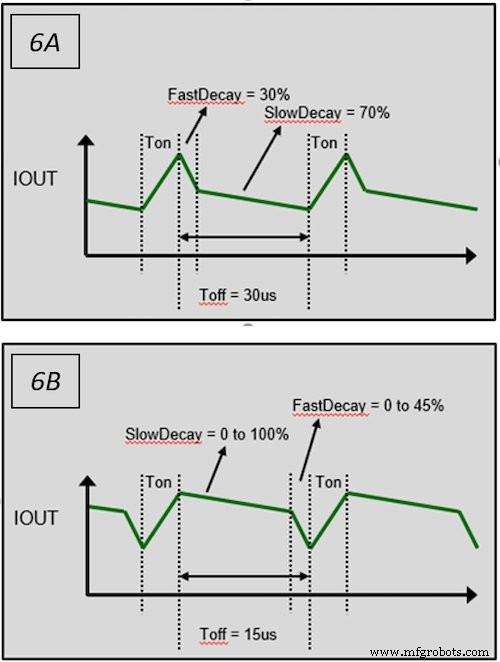
Рис. 6A. Традиционный смешанный распад, где фиксировано соотношение быстрого и медленного распада.
Рисунок 6B. QuietStep может динамически регулировать соотношение быстрого и медленного затухания, чтобы поддерживать текущий контроль и минимизировать текущие пульсации.
Быстрое затухание вводится только тогда, когда требуется для регулирования тока, что приводит к минимально возможным токам пульсаций. На рисунке 7 показаны сильные пульсации тока, возникающие в результате фиксированного смешанного затухания с уменьшающимся током и потери контроля над током с медленным спадом с увеличением тока. Технология QuietStep устраняет эти эффекты, сокращая ток пульсации вдвое по сравнению со смешанным затуханием. Когда ток увеличивается, QuietStep поддерживает регулировку тока до нуля ампер.
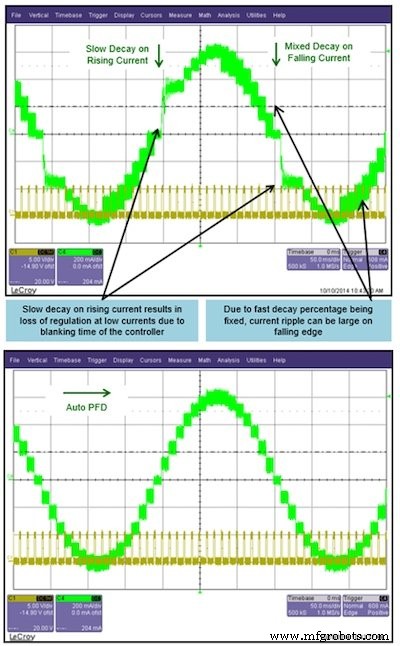
Рисунок 7. Традиционный медленный спад с увеличением тока и смешанный спад с уменьшением тока приводит к потере регулирования при нарастании с увеличением тока и большой пульсации с уменьшением тока. QuietStep обеспечивает отличное регулирование тока с увеличением тока при сохранении низких пульсаций тока на протяжении всего электрического цикла.
Уменьшение пульсаций и резонанса тока на уровне системы сводит к минимуму вибрацию, а также слышимый шум, вызванный вибрацией. Результат - лучшее видеоизображение в системах видеонаблюдения и превосходное качество печати на 3D-принтерах.
Снижение звукового шума и вибрации улучшает практически все приложения для управления двигателями, от дверных замков и управления клапанами для домашней автоматизации до систем точного зрения и 3D-печати. Технология QuietStep от Allegro устраняет необходимость в попытках определить источник шума и вибрации в системе. Полностью интегрированный в ИС, QuietStep прост в реализации, не требует программирования или внешних компонентов и полностью автоматизирован.
Развертывание QuietStep с драйверами биполярных шаговых двигателей
Благодаря драйверам микрошаговых двигателей, позволяющим использовать эту передовую технологию, такую как Allegro A5984, формы сигналов тока автоматически оптимизируются в широком диапазоне скоростей и характеристик шаговых двигателей. Драйверы шагового двигателя, оснащенные технологией QuietStep, регулируют количество быстрого затухания на лету во время цикла ШИМ, чтобы минимизировать пульсации тока в различных рабочих условиях.
Функция QuietStep улучшает производительность системы, что приводит к снижению слышимого шума двигателя, снижению вибрации и повышению точности шагов. Используя эту технологию, драйвер A5984 предназначен для управления биполярными шаговыми двигателями от полношаговых до 1/32 ступенчатых режимов и обеспечивает выходную мощность привода до 40 В и ± 2 А. В целом алгоритм QuietStep позволяет упростить систему. проектирование, реализация и эксплуатация.
Чтобы узнать больше о драйвере A5984 и технологии QuietStep, посетите страницу продукта A5984.
Allegro MicroSystems - мировой лидер в области решений в области питания и датчиков для управления движением и энергосберегающих систем. Для получения дополнительной информации посетите веб-сайт Allegro MicroSystems.
Отраслевые статьи - это форма контента, позволяющая отраслевым партнерам делиться полезными новостями, сообщениями и технологиями с читателями All About Circuits, что не подходит для редакционного контента. Все отраслевые статьи подлежат строгим редакционным правилам с целью предлагать читателям полезные новости, технические знания или истории. Точки зрения и мнения, выраженные в отраслевых статьях, принадлежат партнеру, а не обязательно All About Circuits или ее авторам.
Промышленный робот
- Разрешающие схемы и схемы блокировки
- Шаговые двигатели
- Renesas расширяет линейку микроконтроллеров RX24T и RX24U для приложений управления двигателем
- Nanotec:компактный контроллер двигателя для бесщеточных двигателей постоянного тока и шаговых двигателей
- Приложения и ограничения генетических алгоритмов
- Как роботизированная сварка TIG повышает точность и контроль качества вашего производства
- IQ Motion Control запускает новую линейку серводвигателей
- Серая зона между серводвигателями и шаговыми двигателями
- Интегрированное в систему безопасности управление движением позволяет сосуществовать безопасности и произ…
- Соединения для управления:коммуникационные интерфейсы для датчиков положения и движения