


Рука робота MeArm - Ваш робот - V1.0
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Об этом проекте
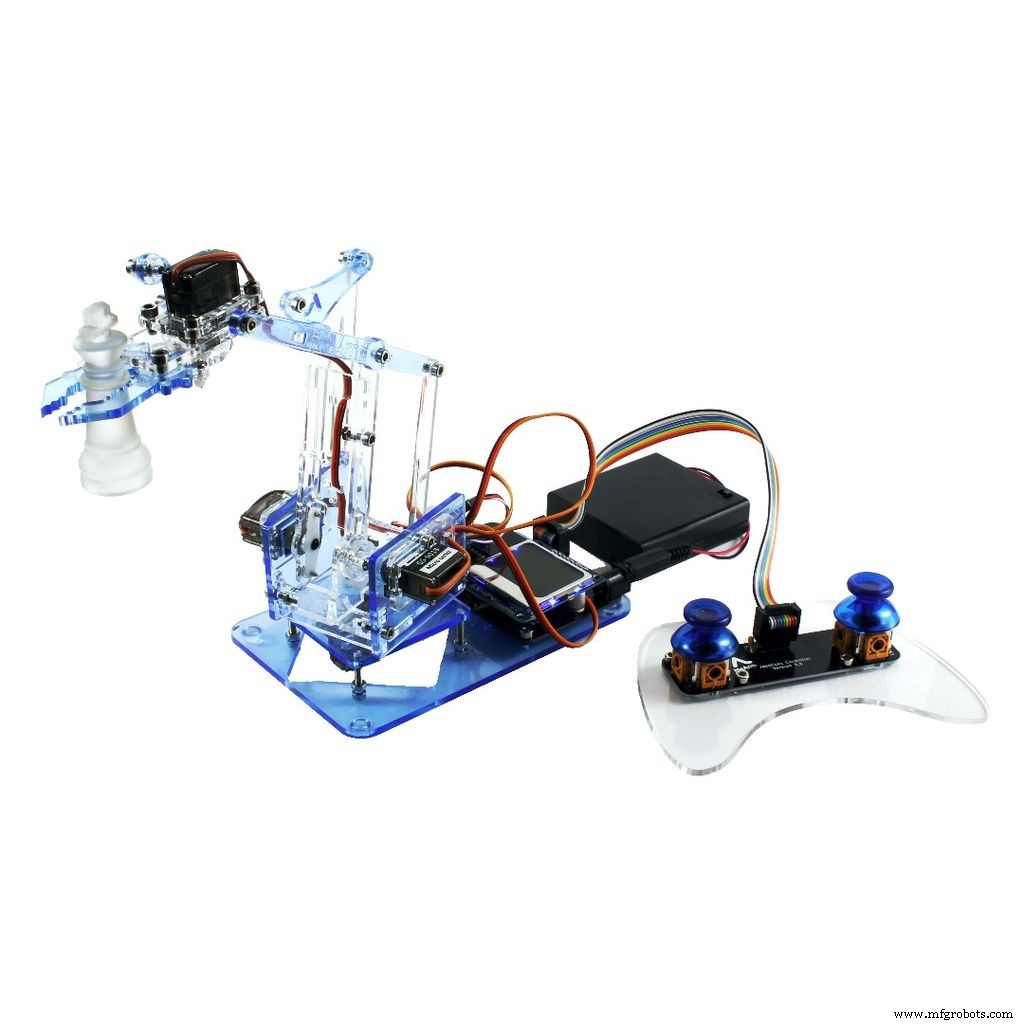
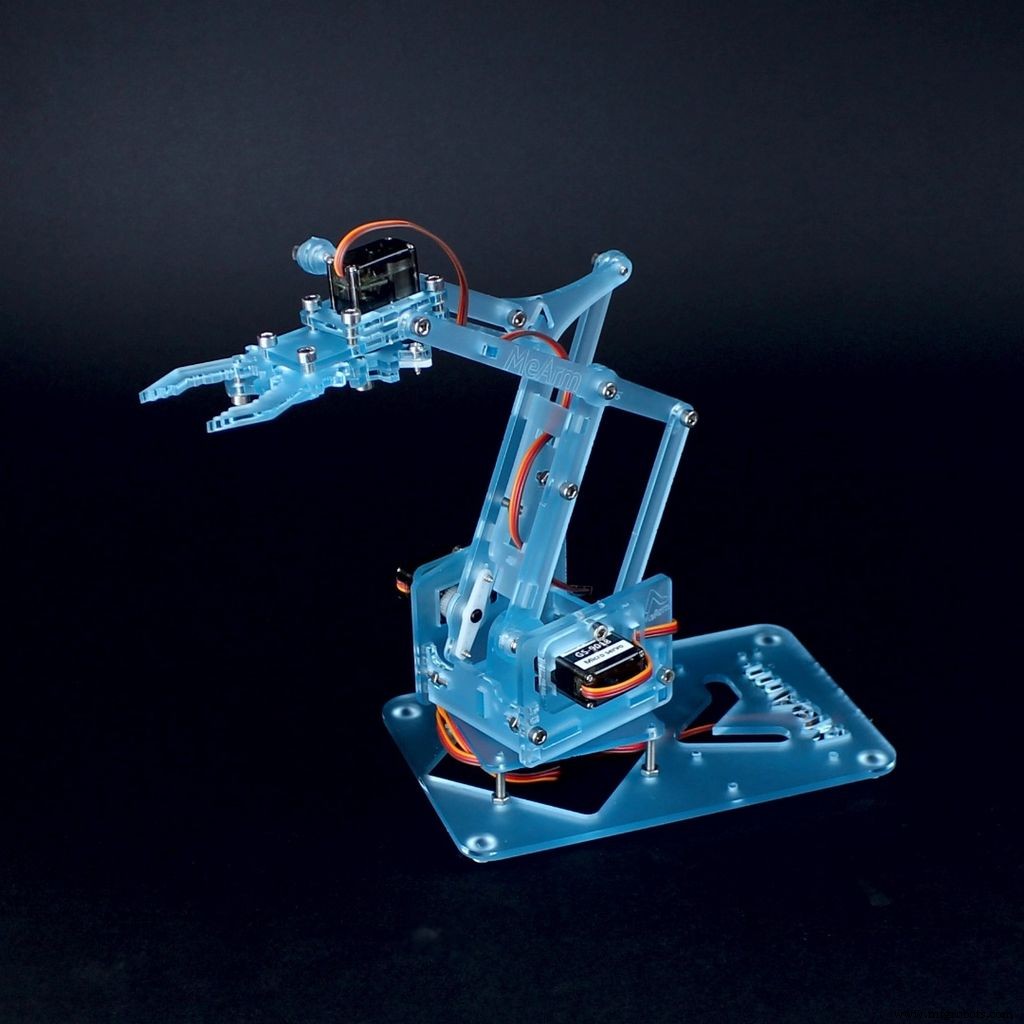
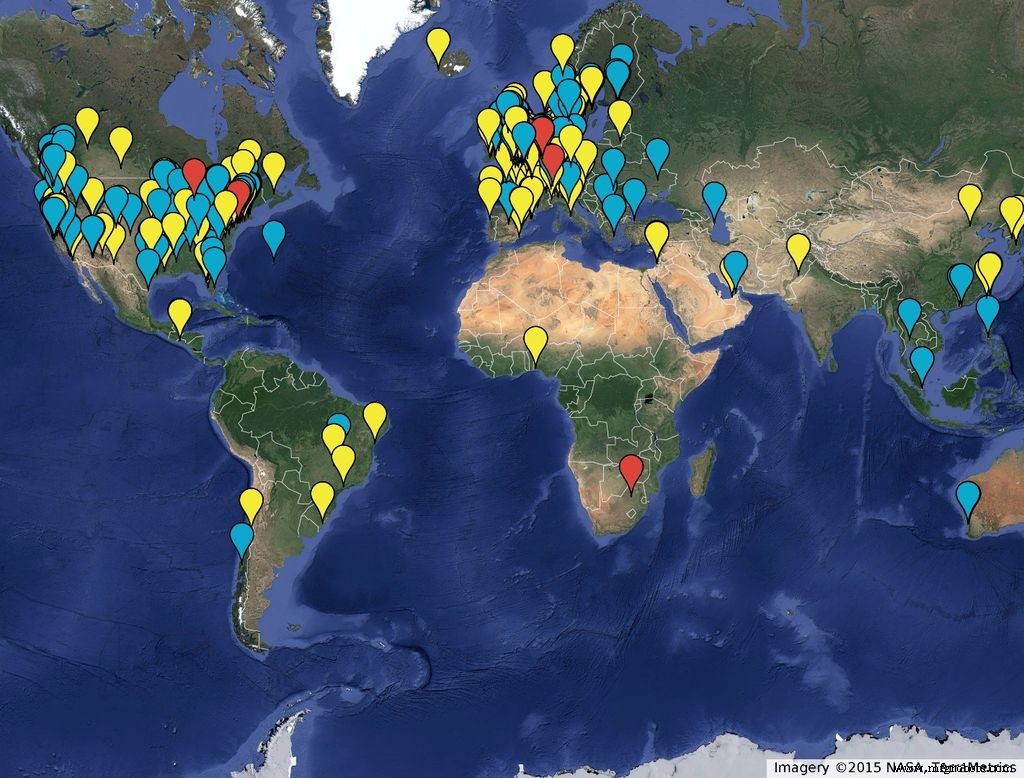
Это самая последняя версия инструкций по сборке манипулятора MeArm Robot Arm. MeArm впервые появился в обучающих программах в апреле 2014 года, когда мы заняли второе место в конкурсе роботов. С тех пор мы видели около 10 000 построенных по всему миру! На нашей карте показаны лишь некоторые из них, но мы действительно гордимся тем, что с помощью инструкций мы стали первым в мире вирусным роботом!
Мы составили эти инструкции, чтобы дополнить их на нашей странице ресурсов.
Шаг 1. Возьмите файлы, зажигайте лазеры!
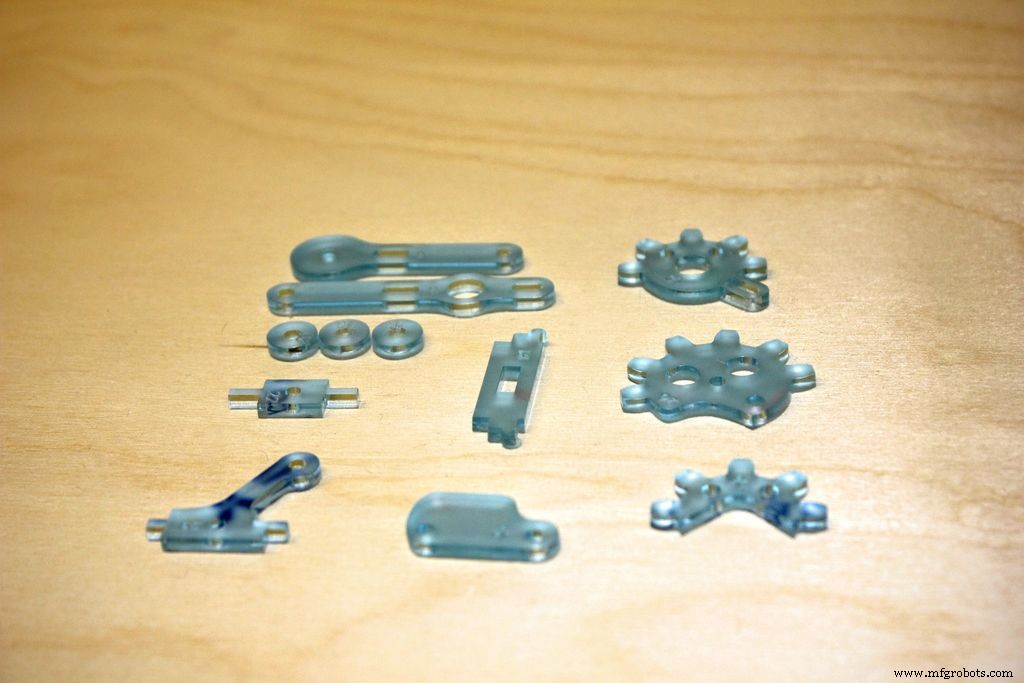
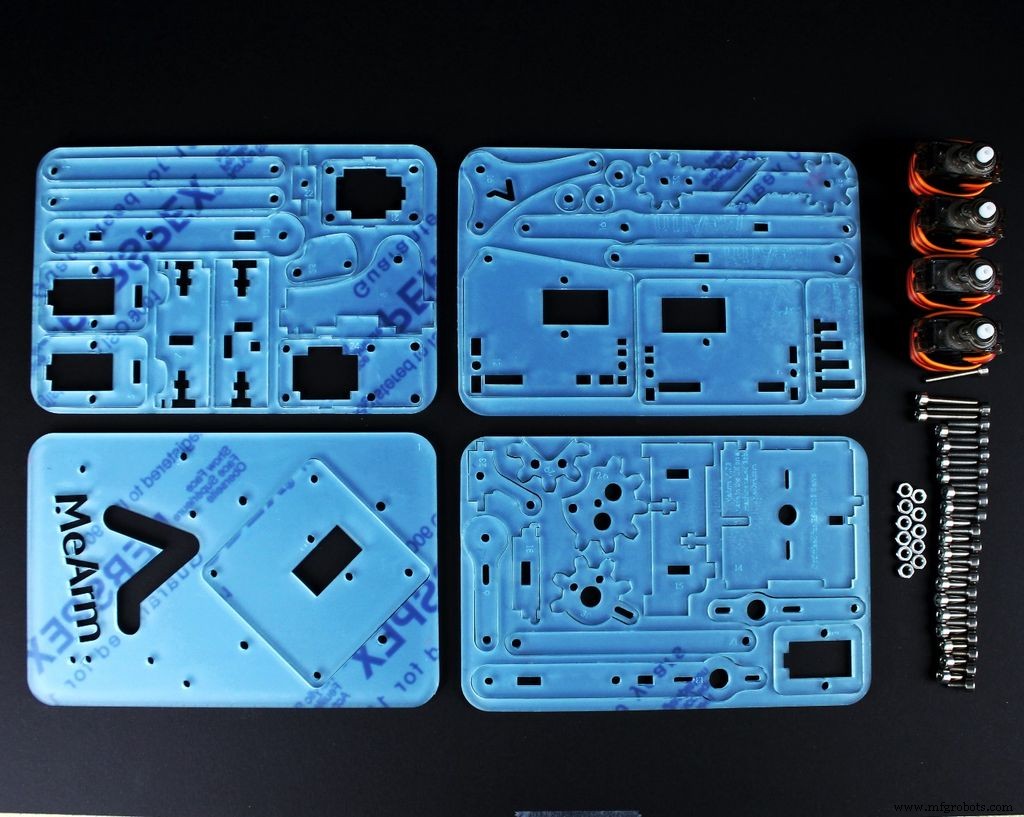
MeArm по-прежнему и почти всегда был оборудованием с открытым исходным кодом. Так что вы можете получить наши файлы на сайте thingiverse. Это файл .dxf, поэтому он должен работать на большинстве лазерных резаков, и мы поместили вокруг деталей рамку, чтобы вы могли установить правильный размер. Мы используем акрил толщиной 3 мм, но дизайн довольно терпимый, и мы видели, как он сделан из дерева и даже напечатан на 3D-принтере.
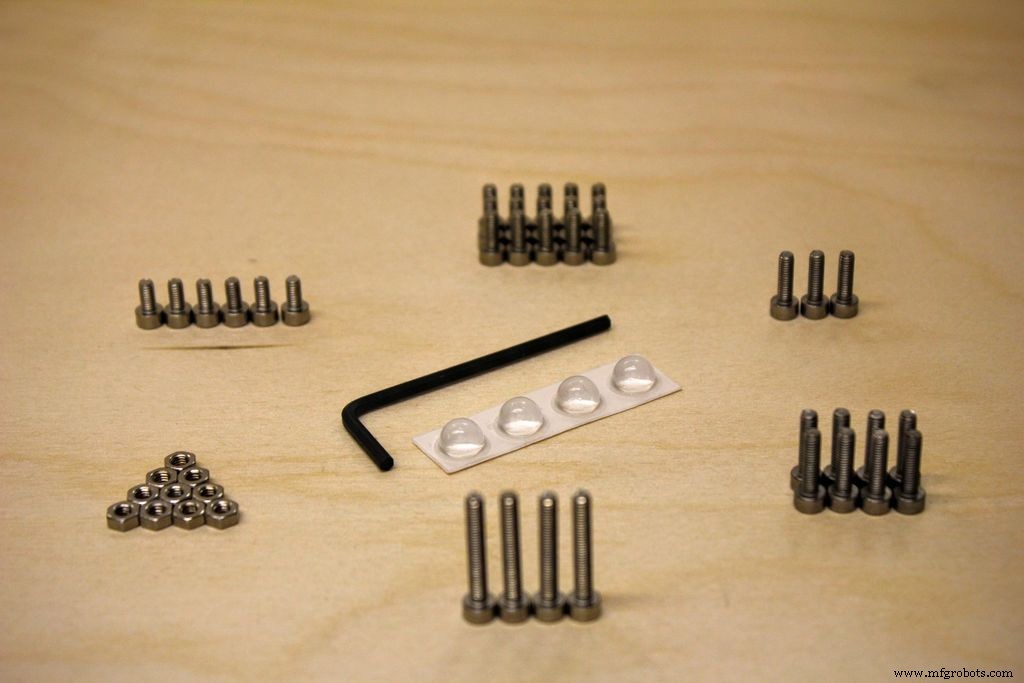
Вам также понадобится куча винтов. Текущая загрузка требует:
Гайка x 11
6 мм x 7
8 мм x 15
10 мм x 5
12 мм x 8
20 мм x 4
Все размеры M3, это метрические 3 мм. Что, как я понимаю, может быть трудно найти в штатах, но, давай же, вы добрались до Луны, вы можете разработать подходящую альтернативу!
Шаг 2:Постой! Давайте откалибруем!
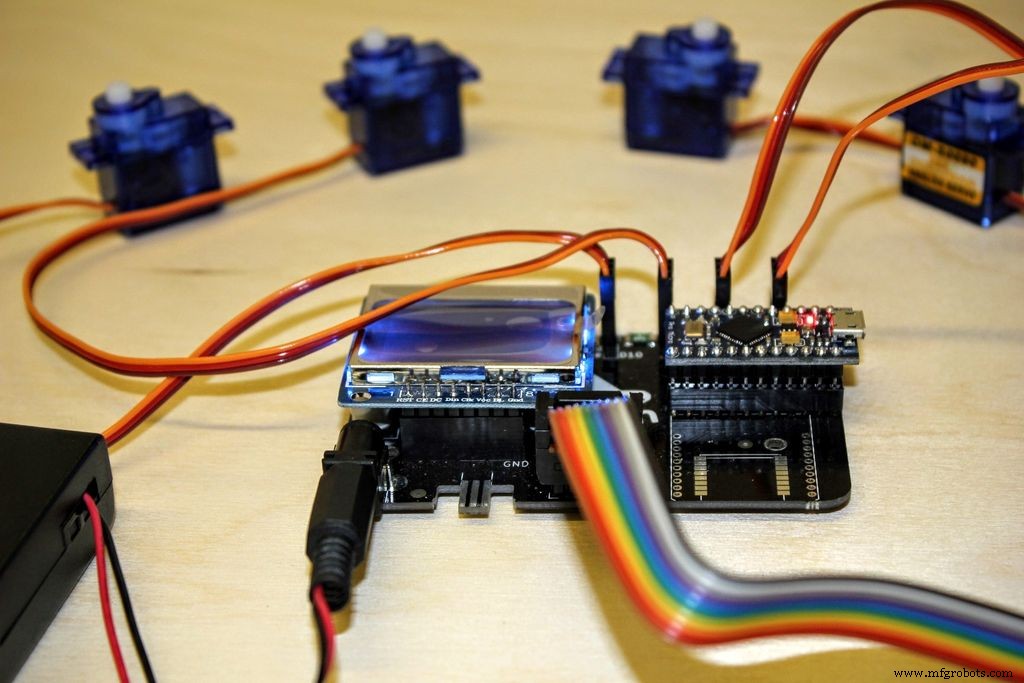
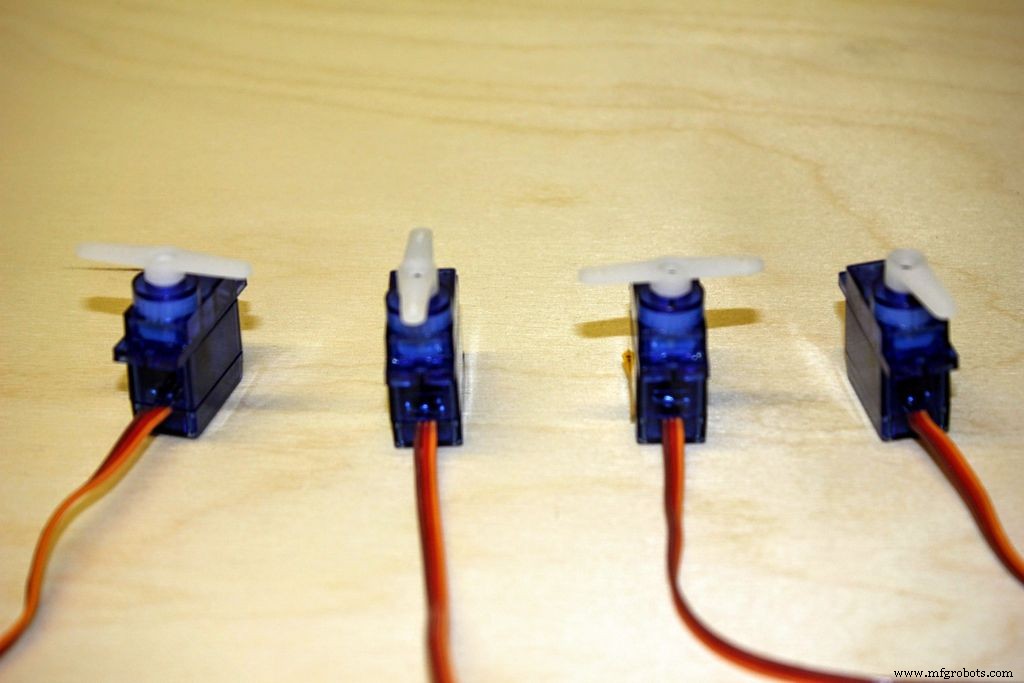

Если вы вырезали детали лазером или приобрели один из наших комплектов, вы действительно захотите его собрать. Но сначала вам нужно выполнить жизненно важный шаг. Нам нужно откалибровать сервоприводы. Здесь мы будем использовать нашу доску мозга, которая совместима с Arduino, но вы можете использовать все, что будет генерировать сигнал ШИМ для их калибровки. Код MeArm доступен для Arduino, Raspberry Pi, Beaglebone Black, Sparkcore и Espruino.
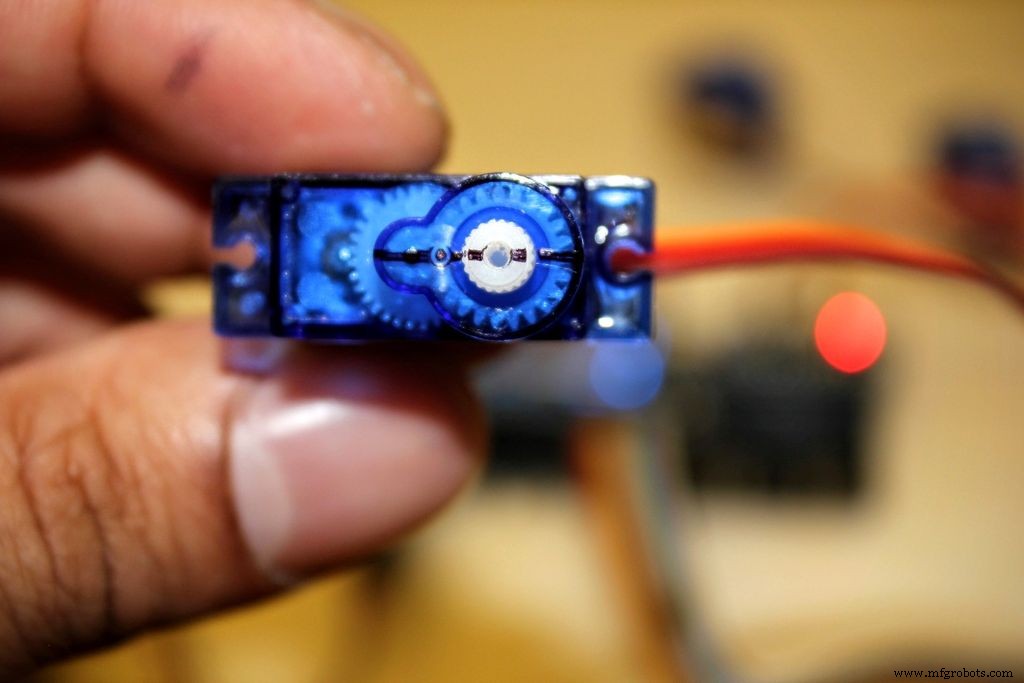
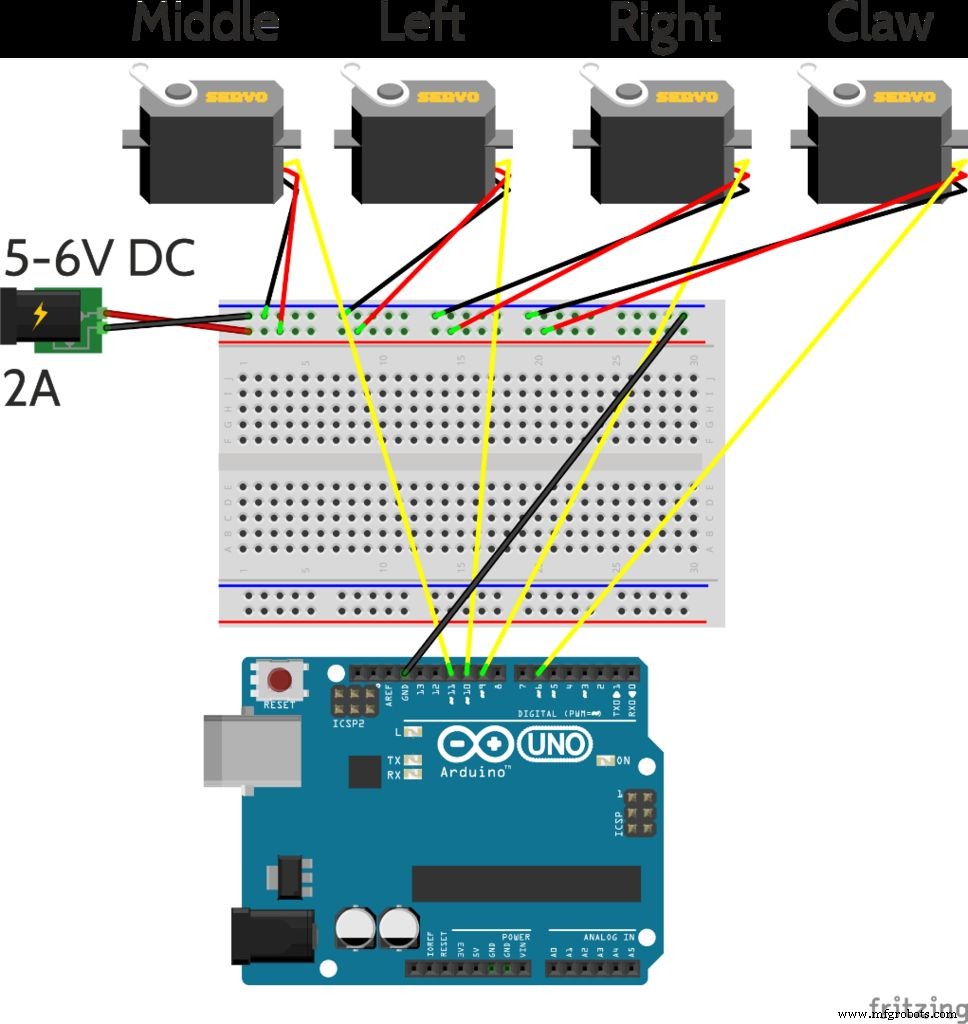
Используя нашу доску мозга, он будет запрограммирован на переход в позиции по умолчанию. Которые равны 90, 90, 90 и 25 для сервоприводов для центра, левого, правого и когтя соответственно. Отметьте центральную линию на шпинделе и корпусе сервопривода, и вы также можете отметить их c, l, r и c или с помощью другой системы, которая будет что-то значить для вас.
Не поддавайтесь искушению повернуть их вручную, крутящий момент, создаваемый вашей могучей силой, может повредить сервоприводы. По той же причине очень важно, чтобы вы проделали этот процесс до создания MeArm.
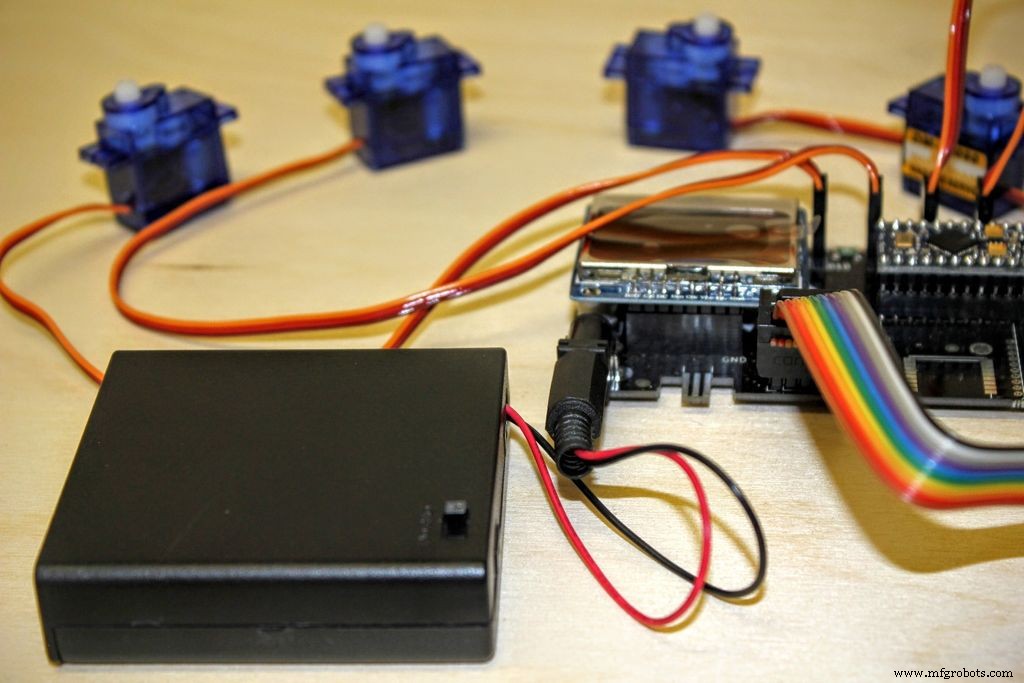
Если вы используете и Arduino, то установка, показанная на изображении выше, и этот код дадут вам тот же результат. Мы используем Codebender для нашего демонстрационного кода и хотели бы футболку. Поэтому используйте эту ссылку, если собираетесь открыть счет.
Самая важная часть, которую необходимо понять при настройке сервоприводов, - это то, что вы не можете управлять ими через свой микроконтроллер. Вам понадобится отдельный источник питания 5-6 В 2 А с общей массой для микроконтроллера. Ознакомьтесь с установочным изображением Arduino для получения дополнительной информации.
Шаг 3. Поехали!
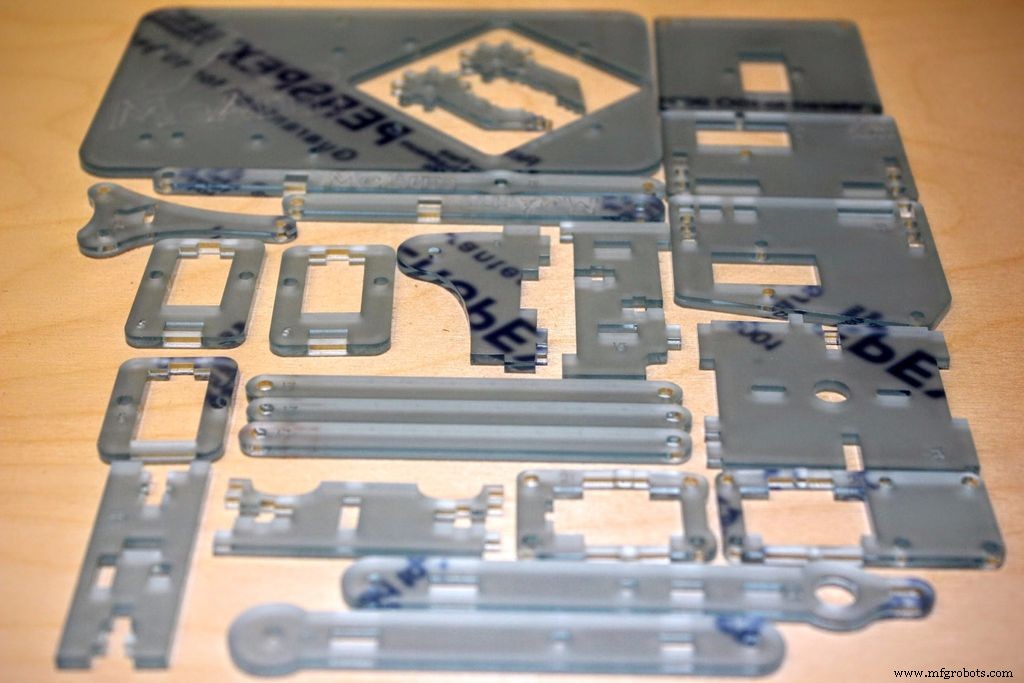
Когда ваши сервоприводы откалиброваны, мы можем получить трещину. Буквально, если у вас есть один из наших наборов оснастки!
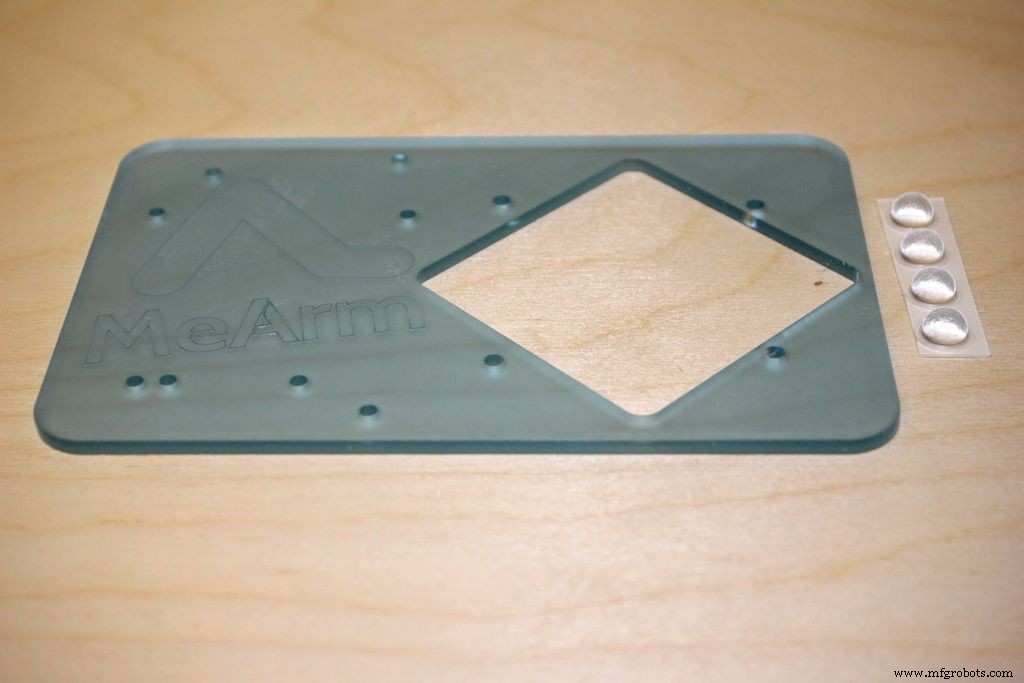
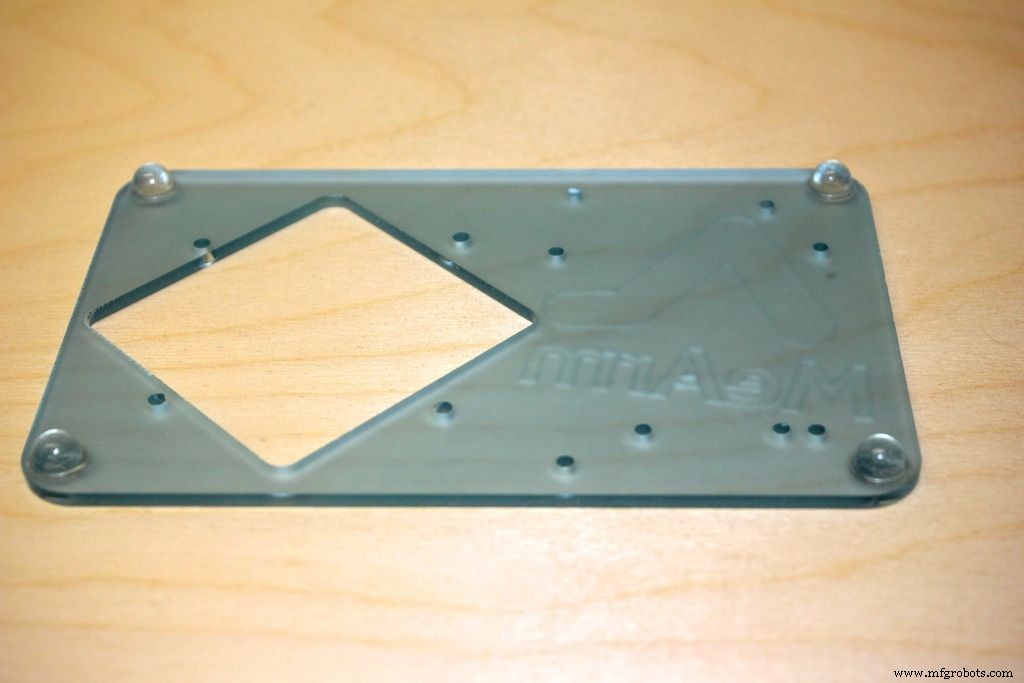
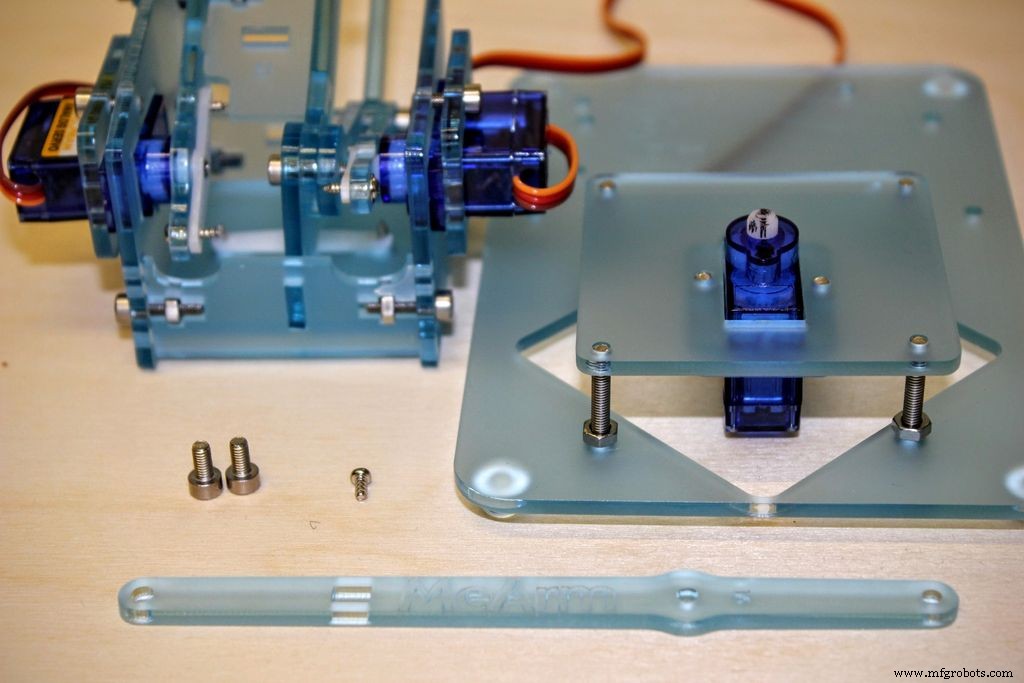
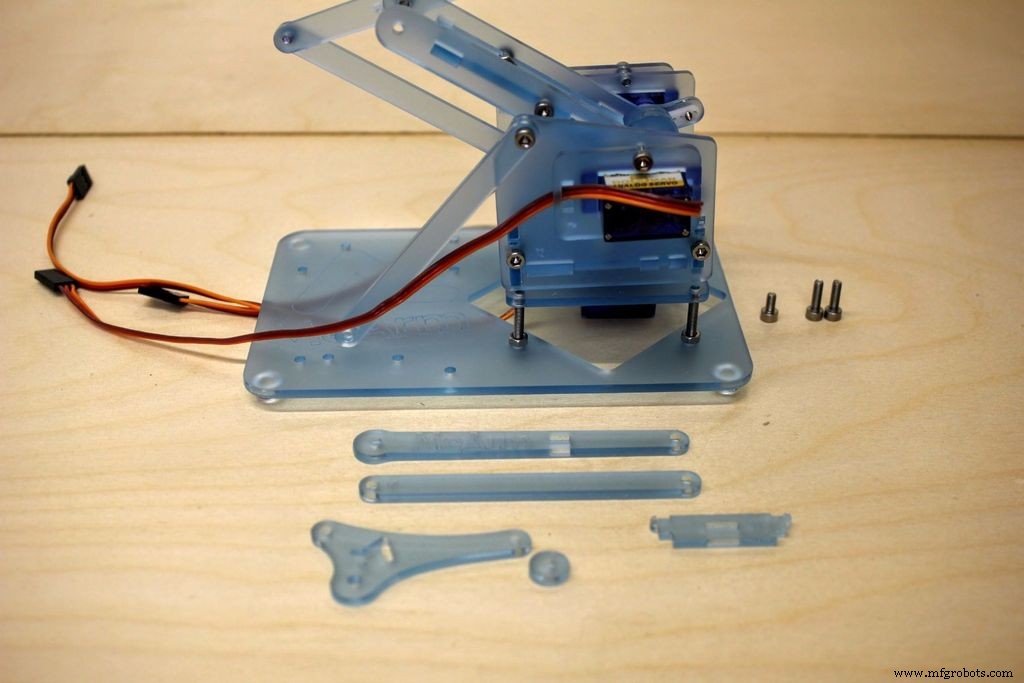
Возможно, вам придется потратить некоторое время на снятие защитной основы с акриловых деталей. Вы можете делать это на ходу или все сразу. Ваш звонок.
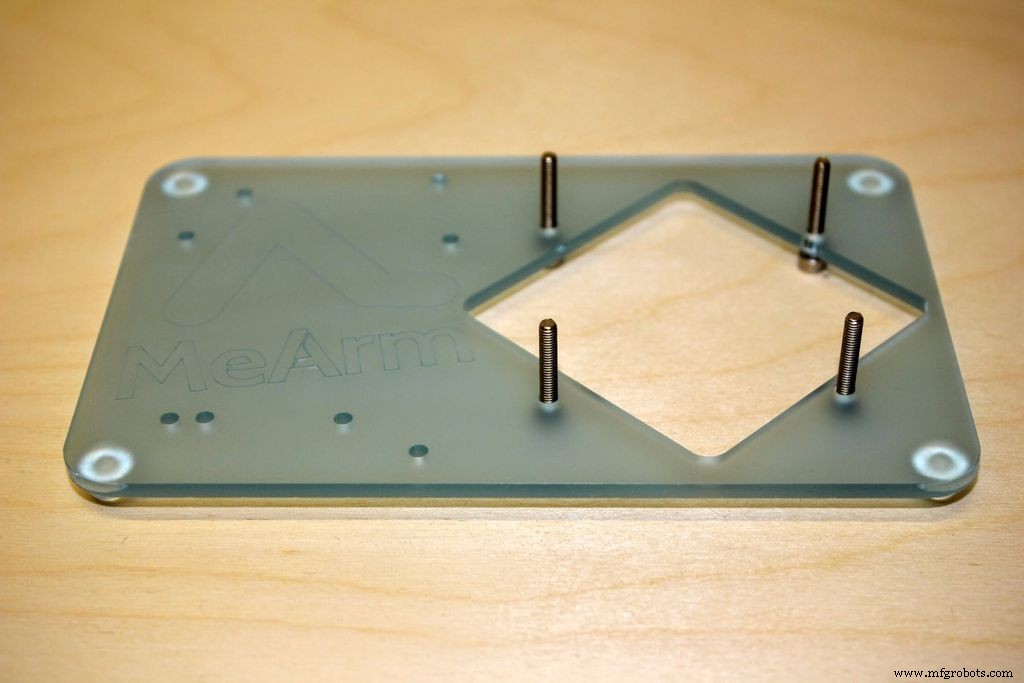
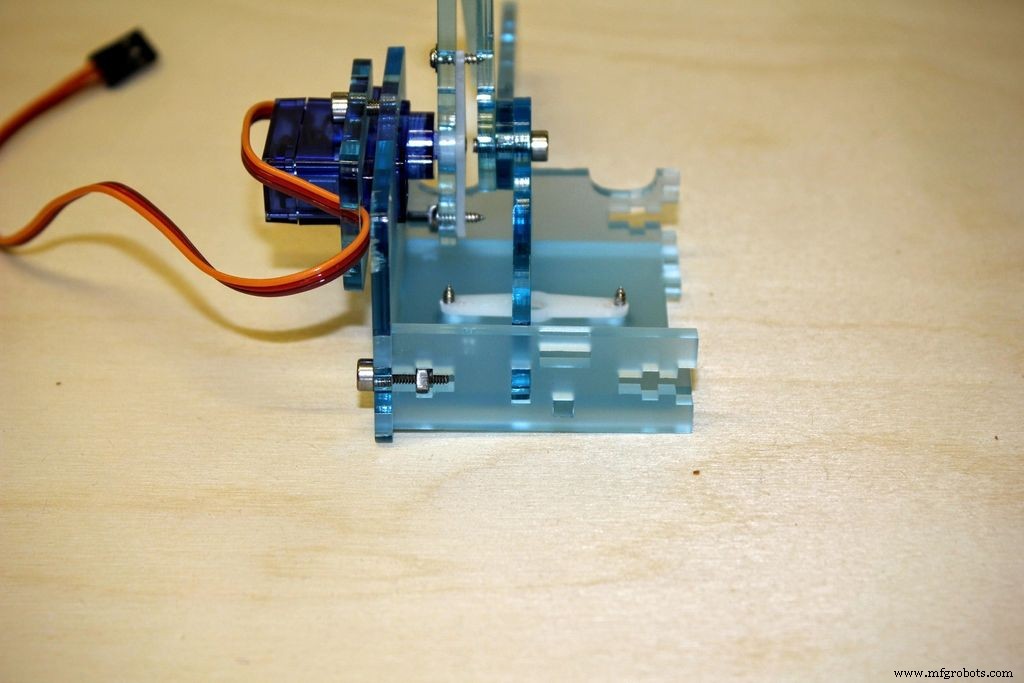
Найдите самую большую часть (# 1) и прикрепите липкие ножки к ее углам. Затем вставьте четыре 20-миллиметровых винта с нижней стороны и прикрутите четыре гайки до середины. Теперь найдите деталь №2, №3, центральный сервопривод и два 8-миллиметровых винта. Проденьте сервопривод через часть № 3, которую мы называем воротником. Протолкните винты через воротник, а затем вверните их в деталь №2.
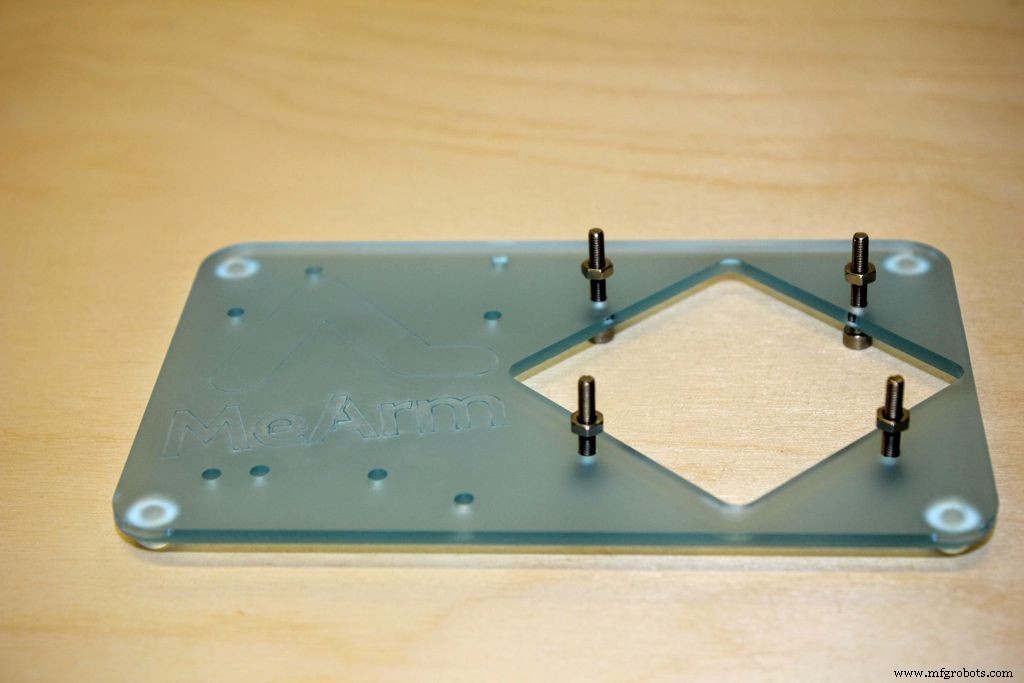
Винты сами вкручиваются в деталь № 2, это означает, что они нарезают собственную резьбу. На MeArm есть отверстия двух размеров:одно - около 3 мм, через которое вы можете протолкнуть винт, а другое - около 2,6 мм, где мы хотим, чтобы винт саморез. Это метод, который мы позаимствовали у замечательного PlotClock Джу.
Теперь мы прикрепляем узел сервопривода / втулки к детали №1 с помощью 20-миллиметровых винтов, они будут саморезаться, и ориентация отверстий на деталях должна означать, что вы не сможете сделать это неправильно. Это называется Poka-yoke и представляет собой метод защиты от неправильного обращения. Если у вас есть ранняя модель v1.0, вы увидите, что моя попытка излишне усердна, поскольку есть только 1/8 способов сделать это правильно (если вы не можете совместить отверстия, переверните деталь). Более поздняя версия была смягчена советом Скотта Пирса и имела 1/2 пути.
Шаг 4. Левая сторона
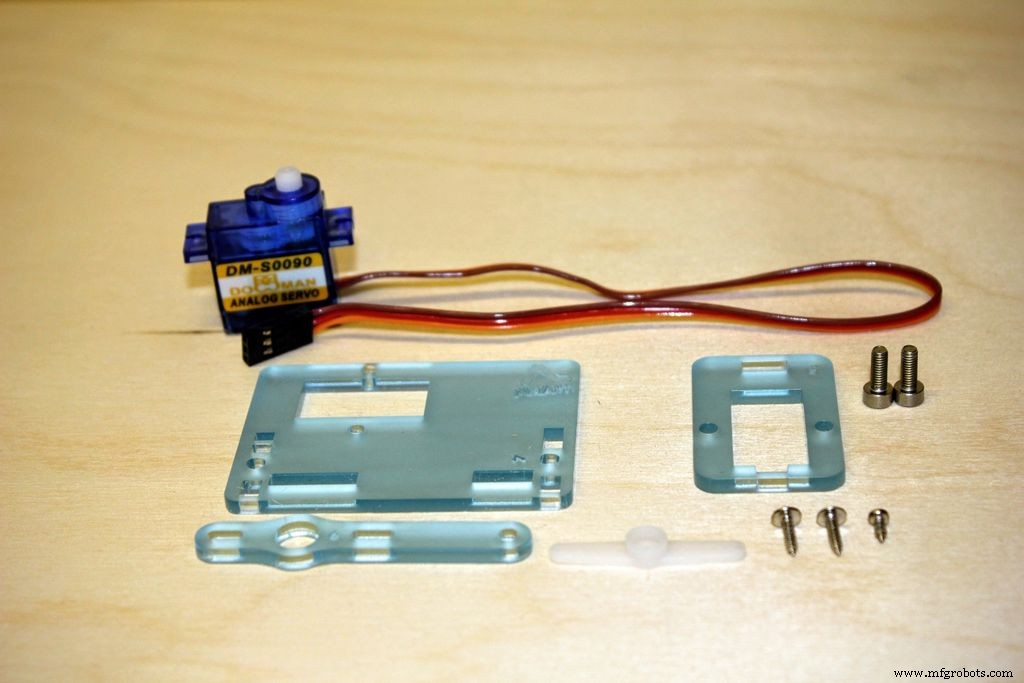
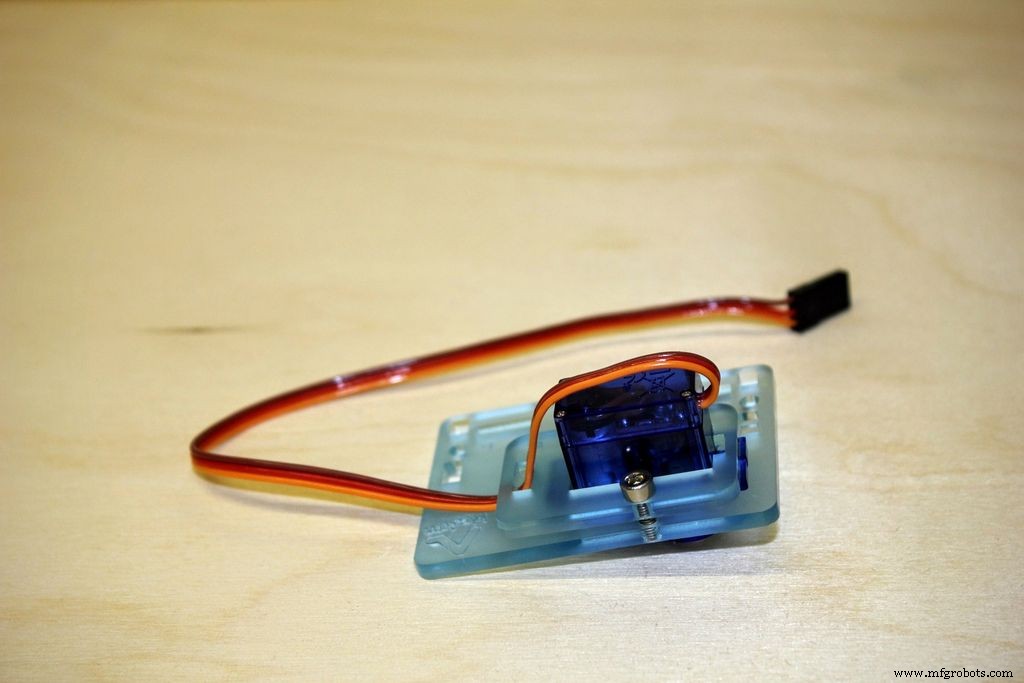

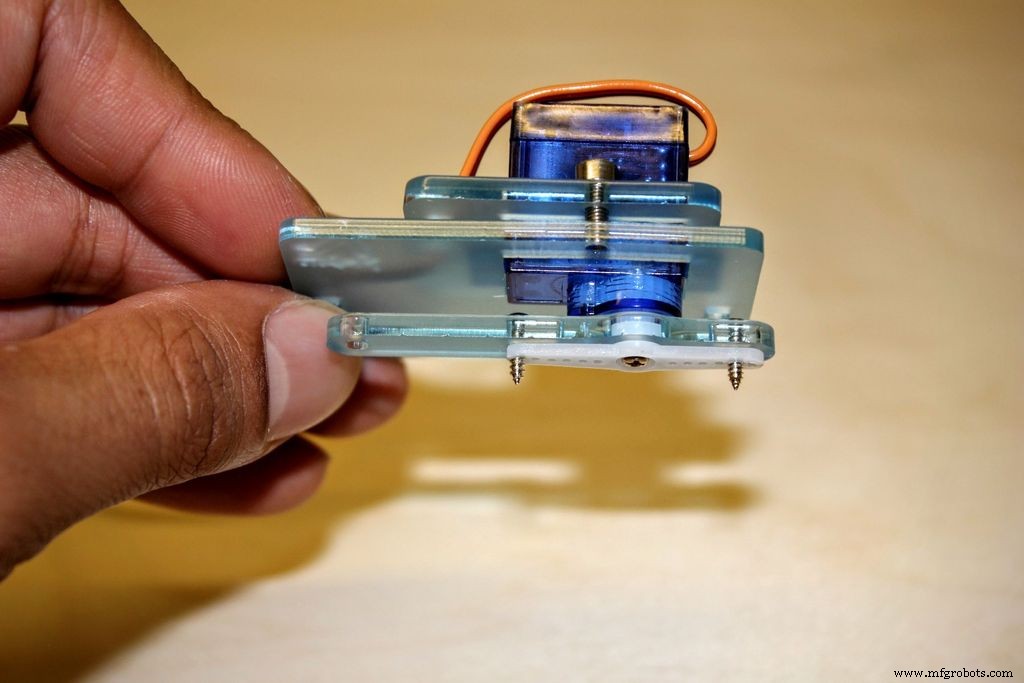
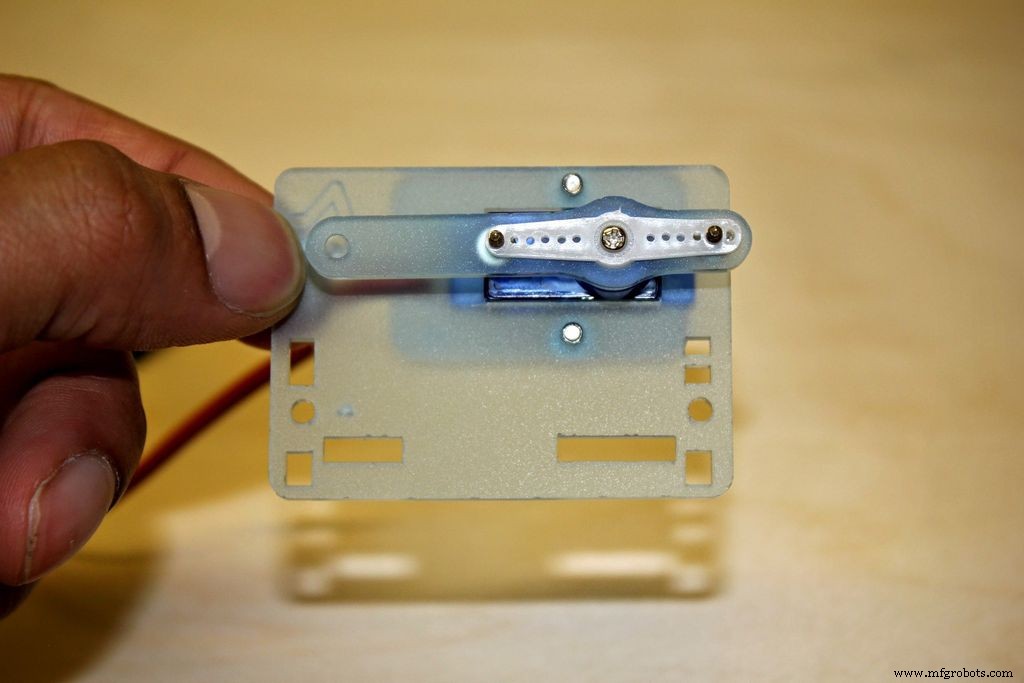
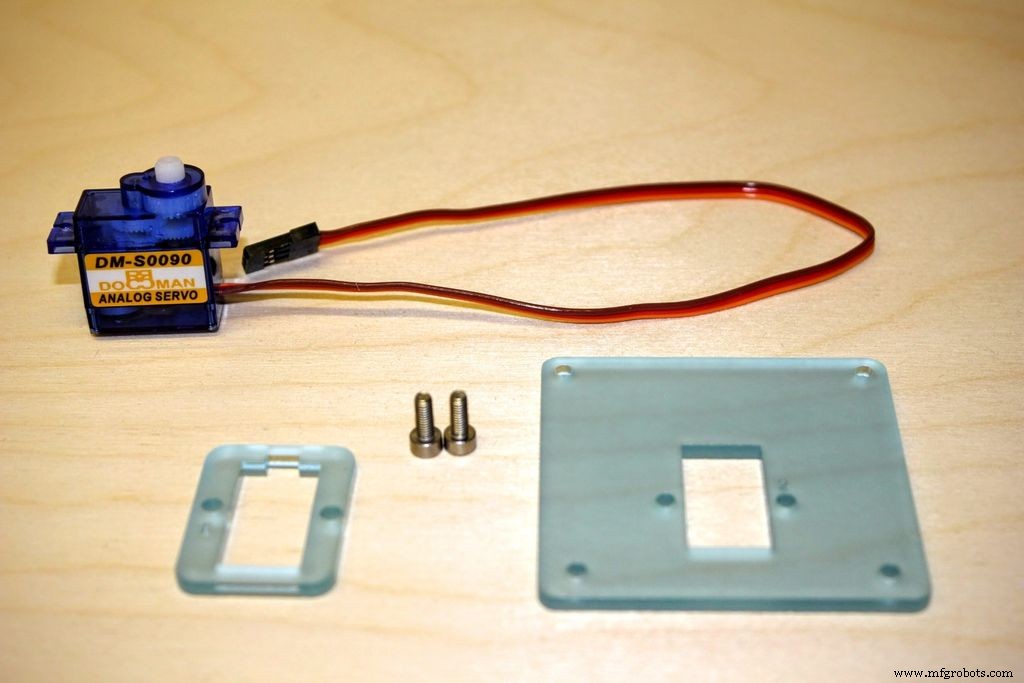
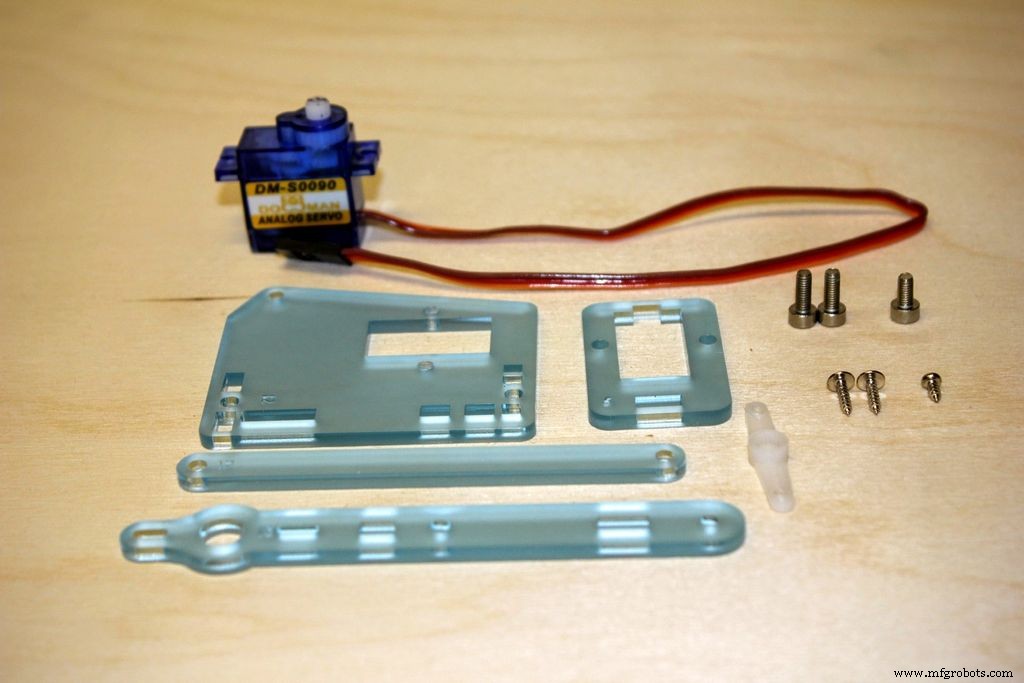
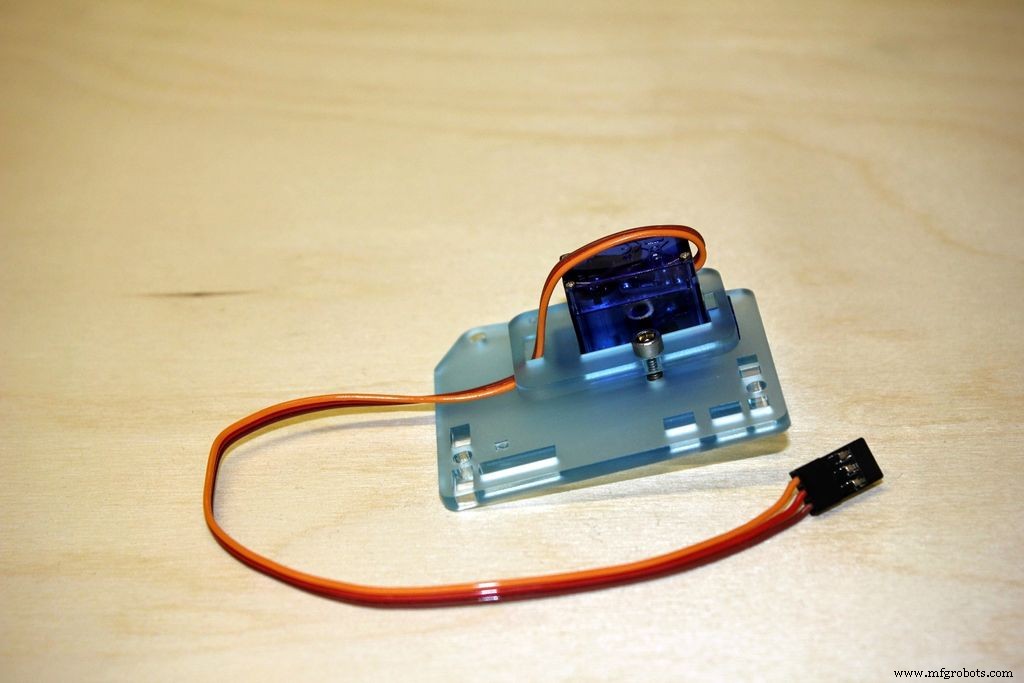
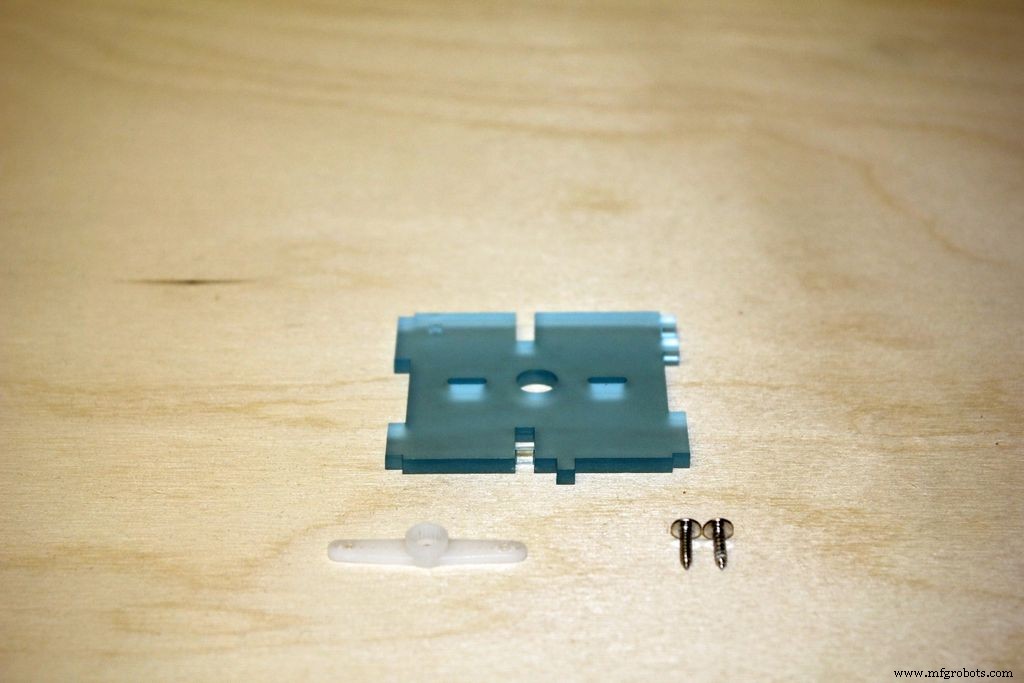
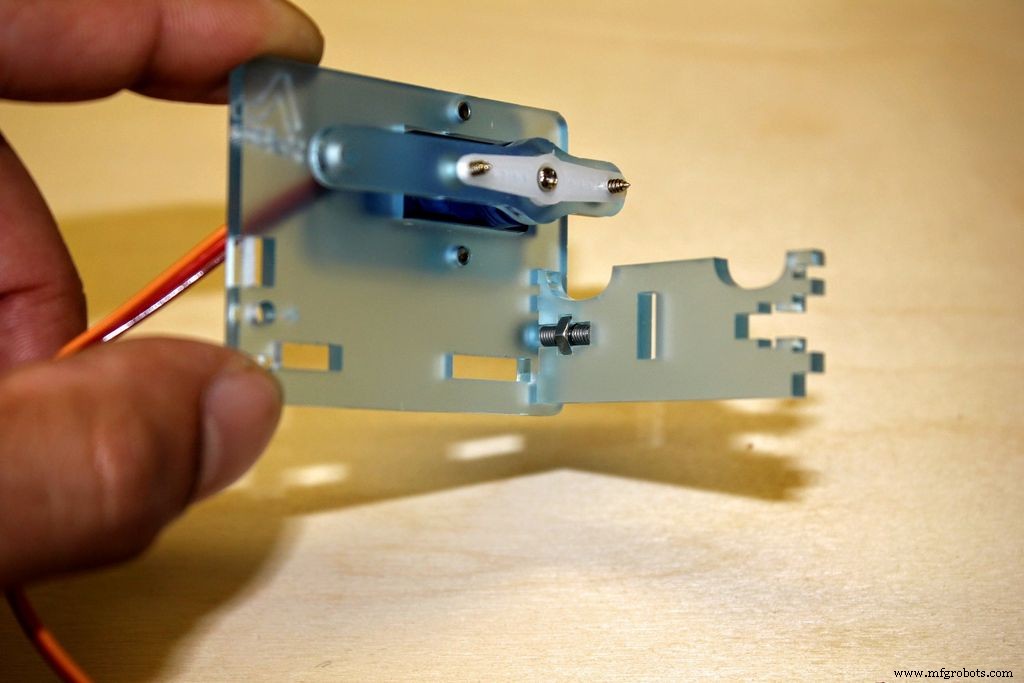
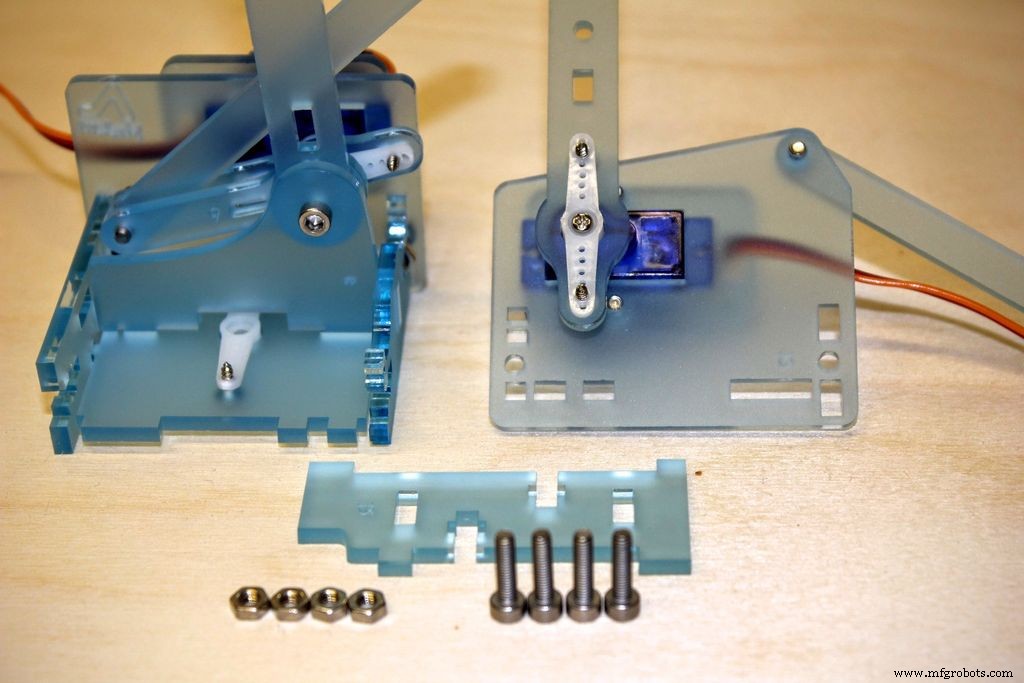
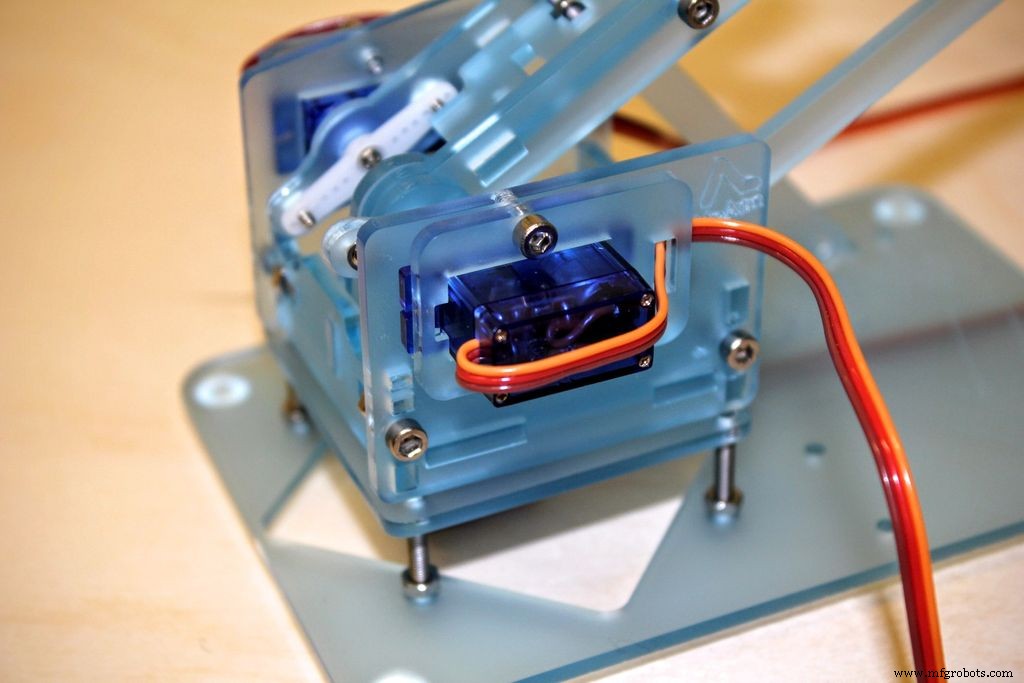
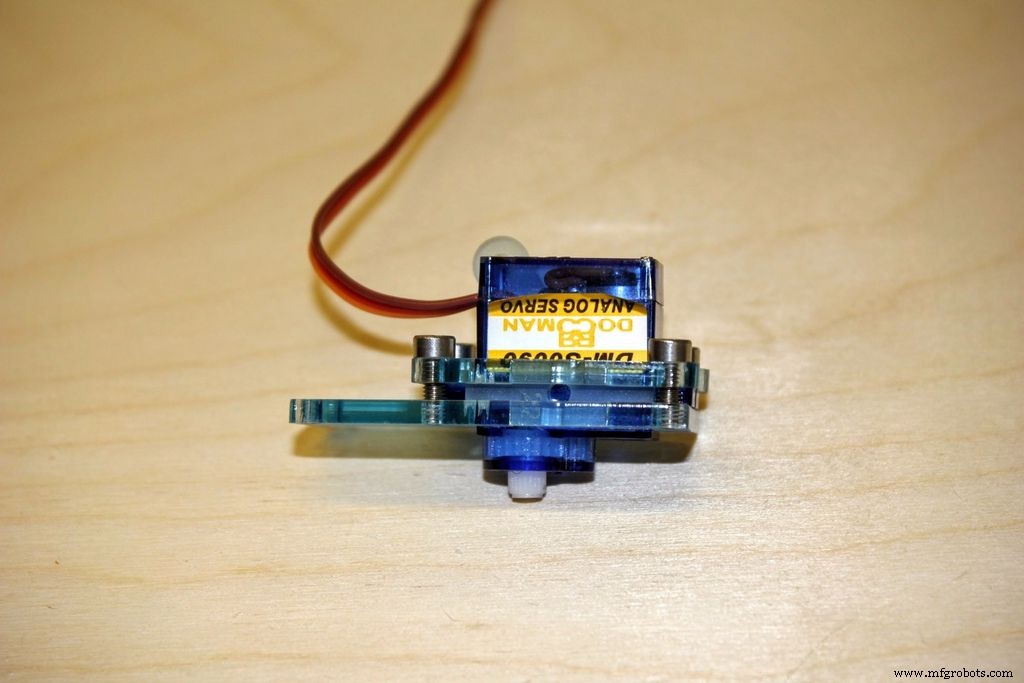
Теперь найдите детали №4, №5, №6, левый сервопривод, два 8-миллиметровых винта и комплект для крепления сервопривода.
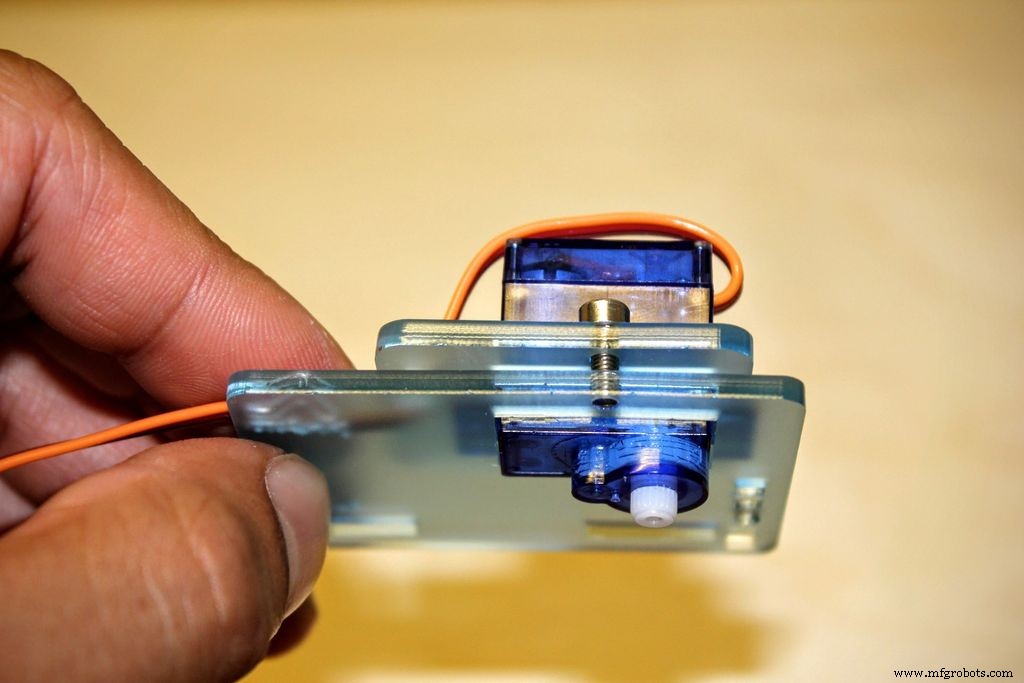
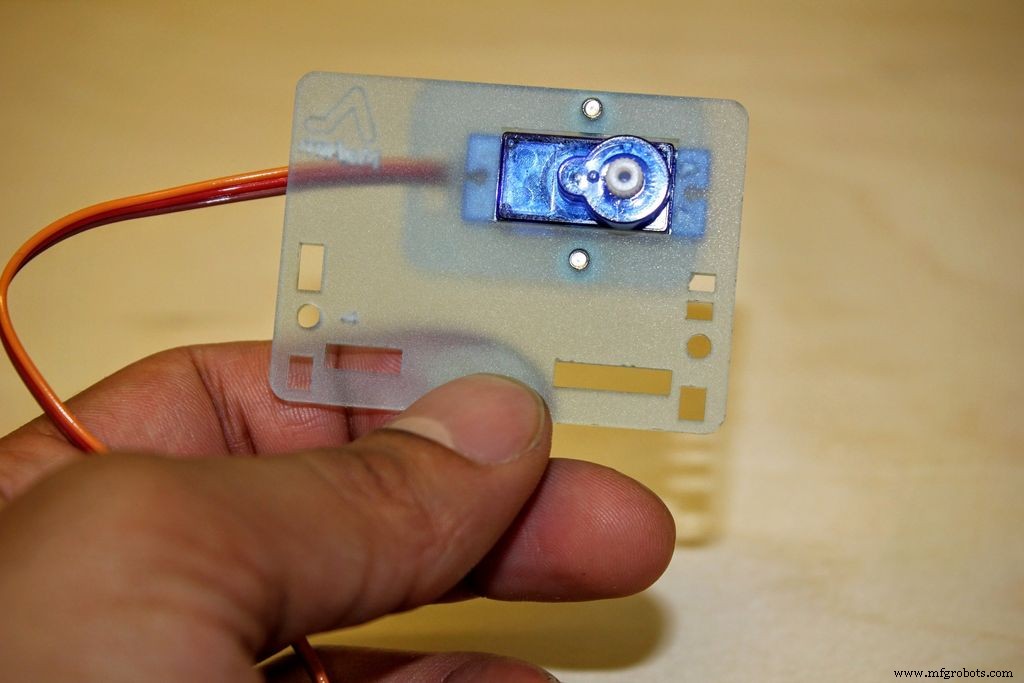
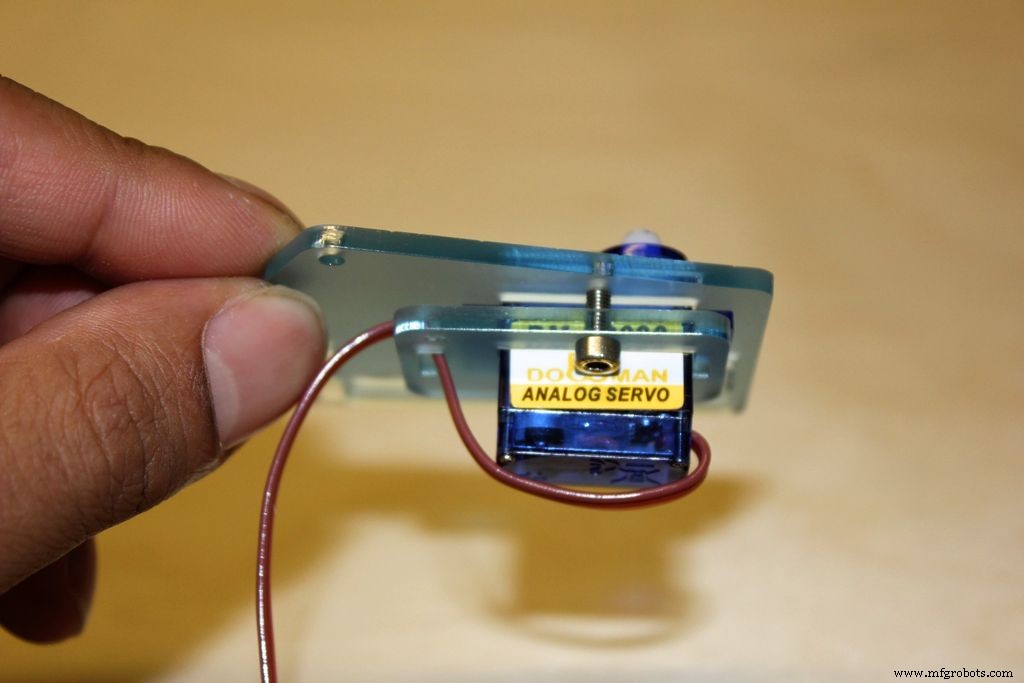
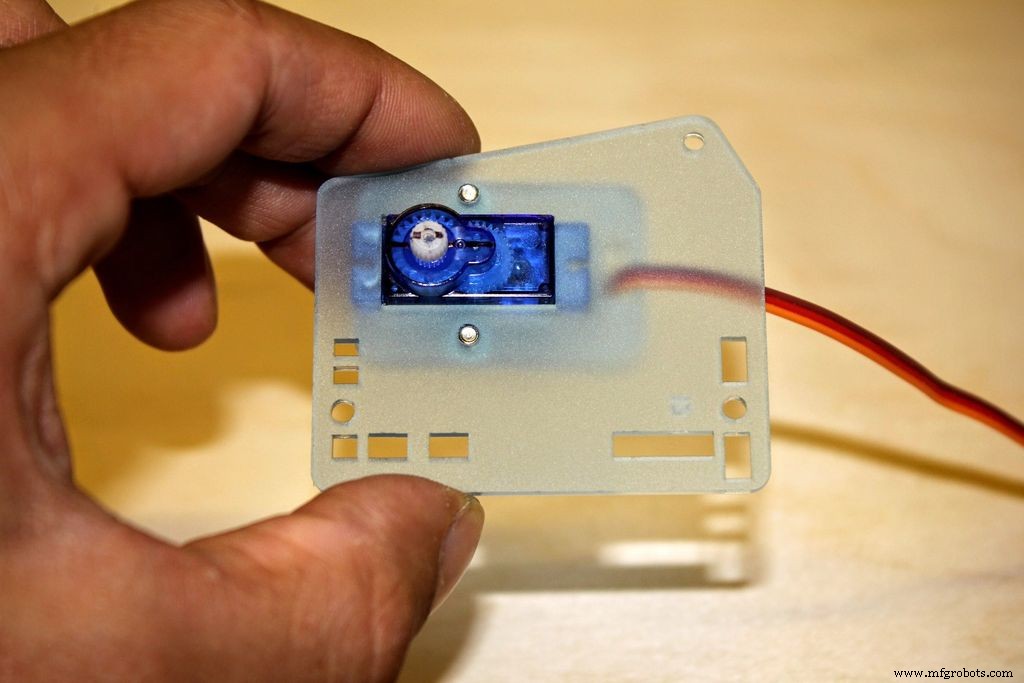
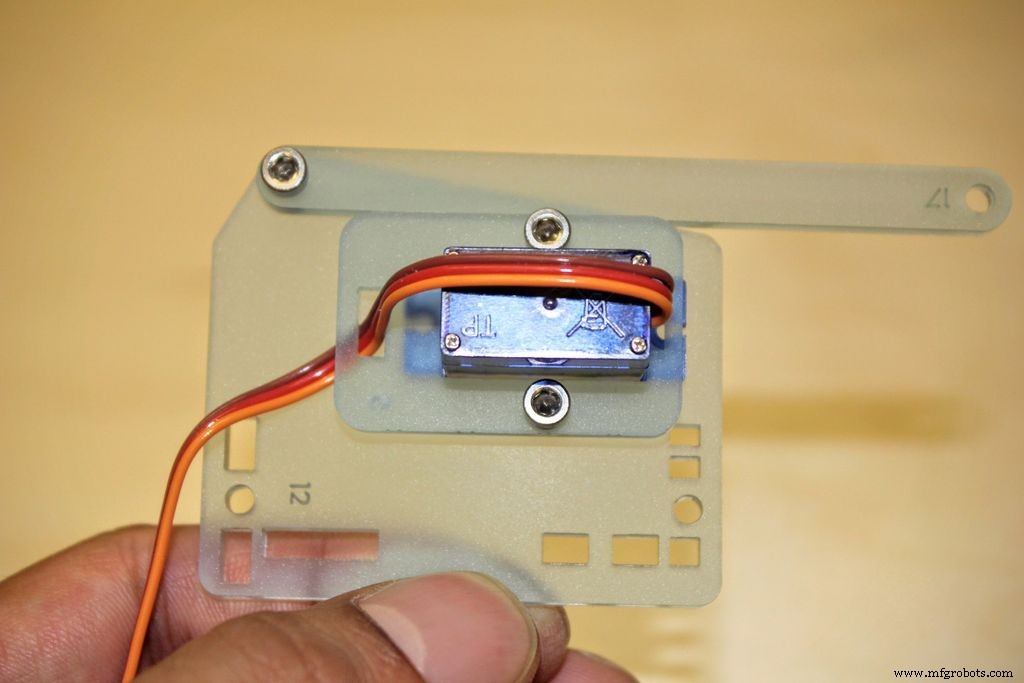
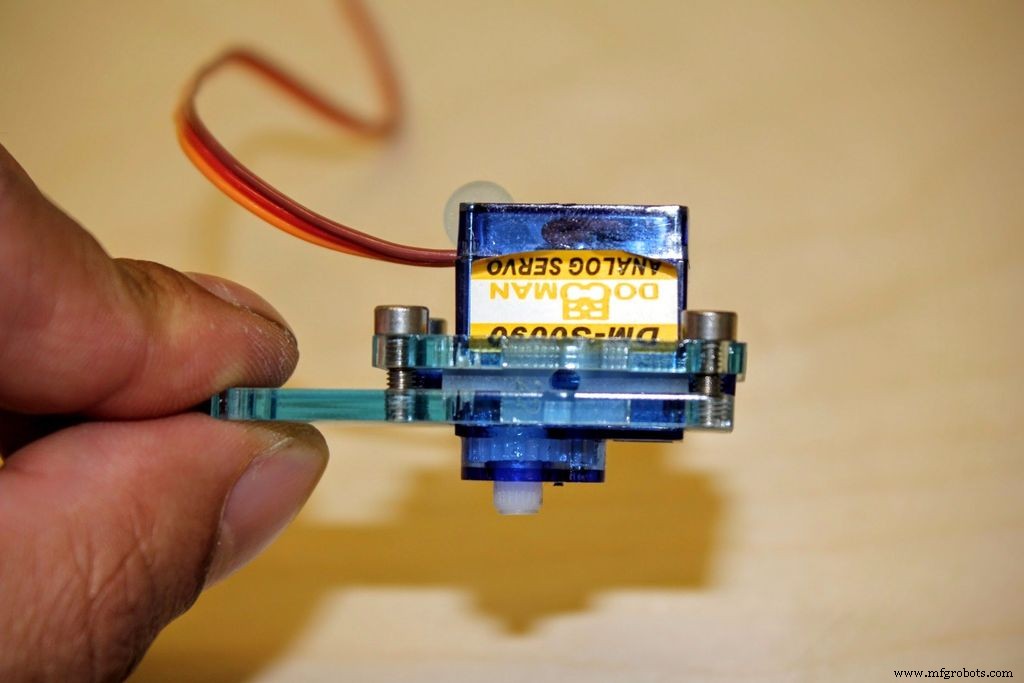
Пропустите сервопривод через воротник (деталь № 5), а затем сервокабель через отверстие для кабеля. Прикрутите хомут к детали № 4 с помощью 8-миллиметровых винтов, стараясь не затягивать слишком сильно . . Вы не хотите, чтобы акрил гнулся, просто удерживайте сервопривод на месте.
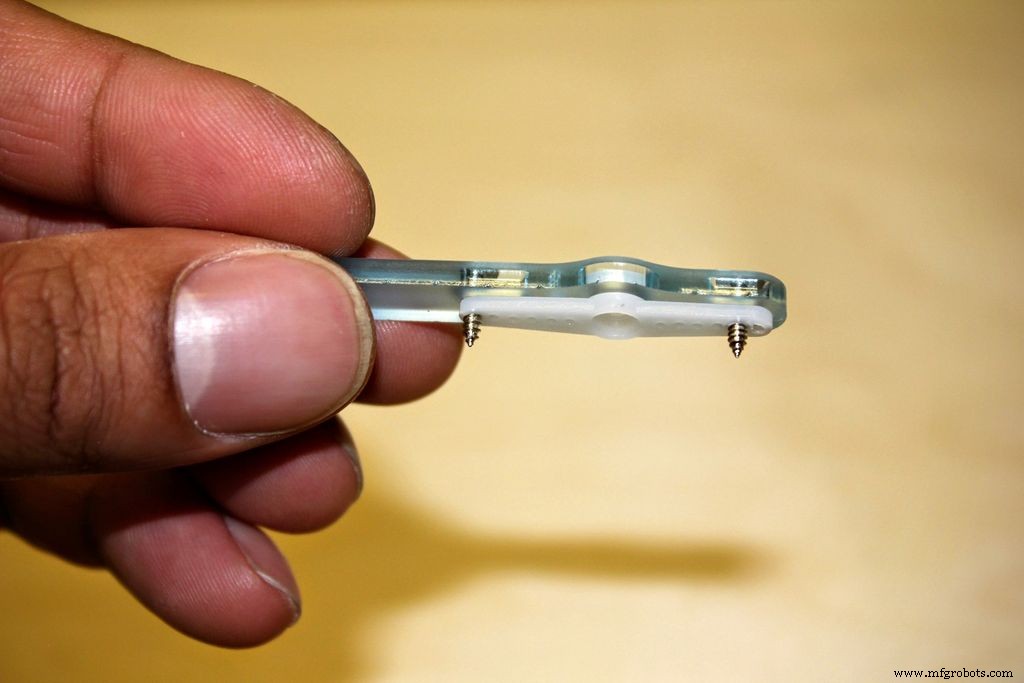
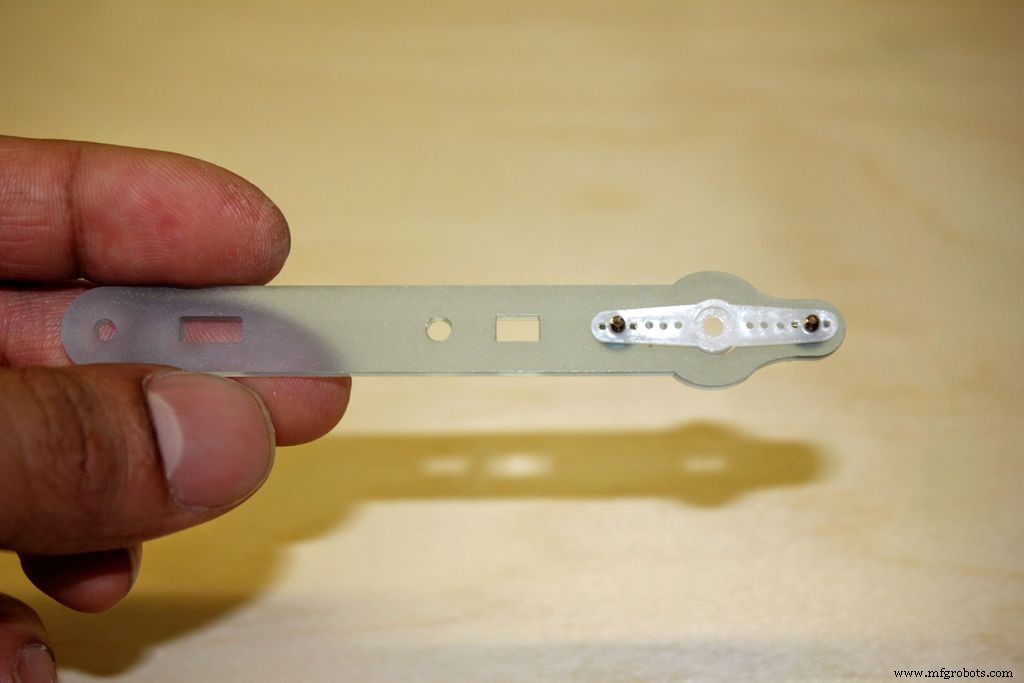
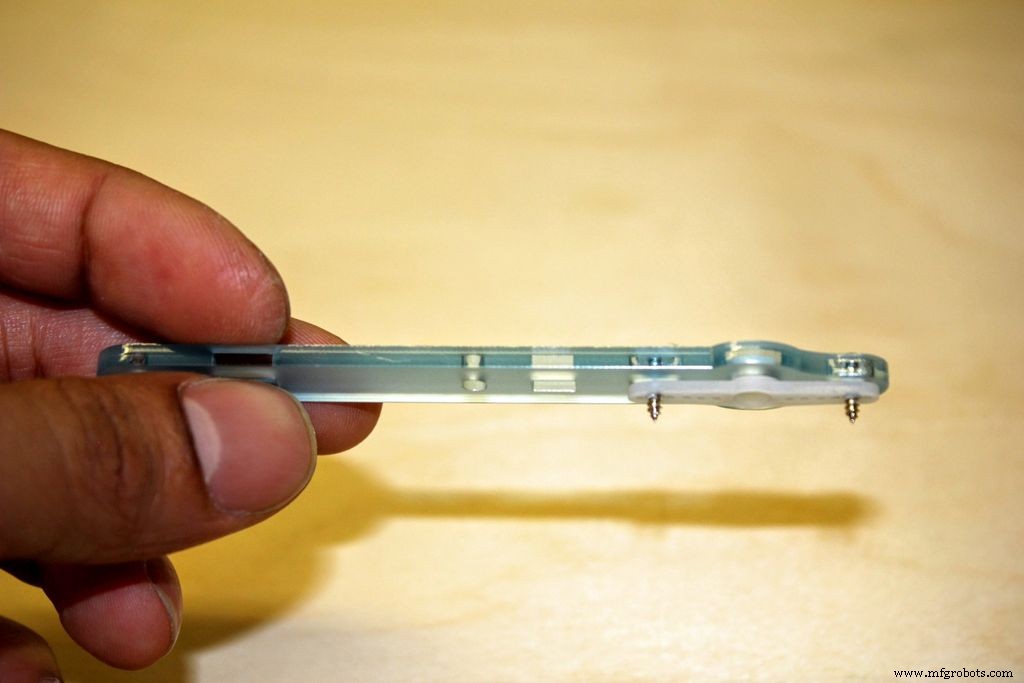
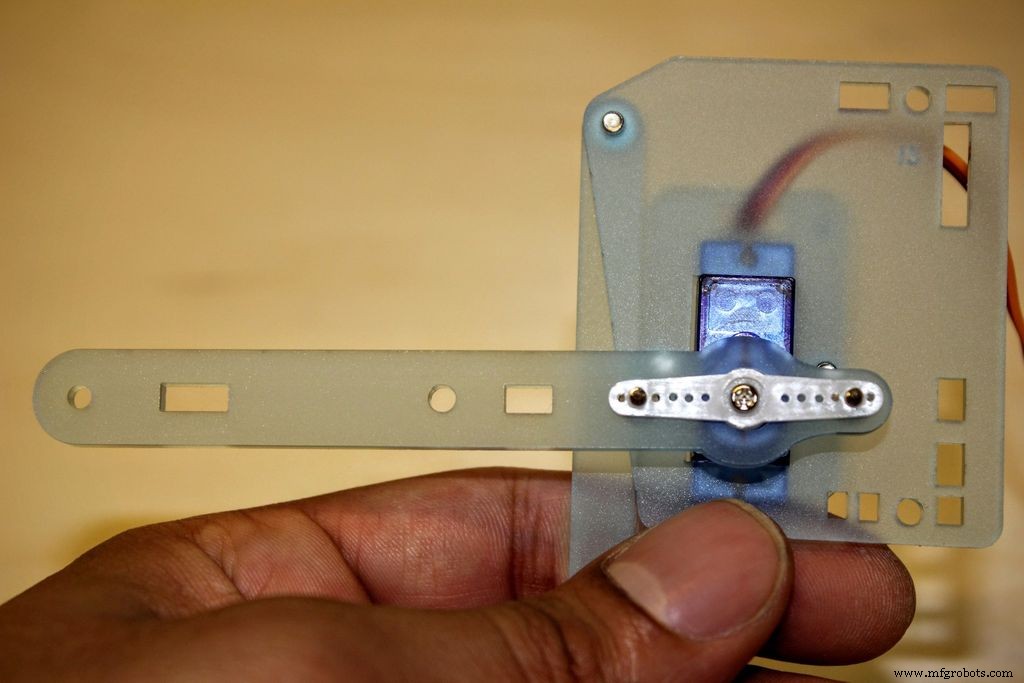
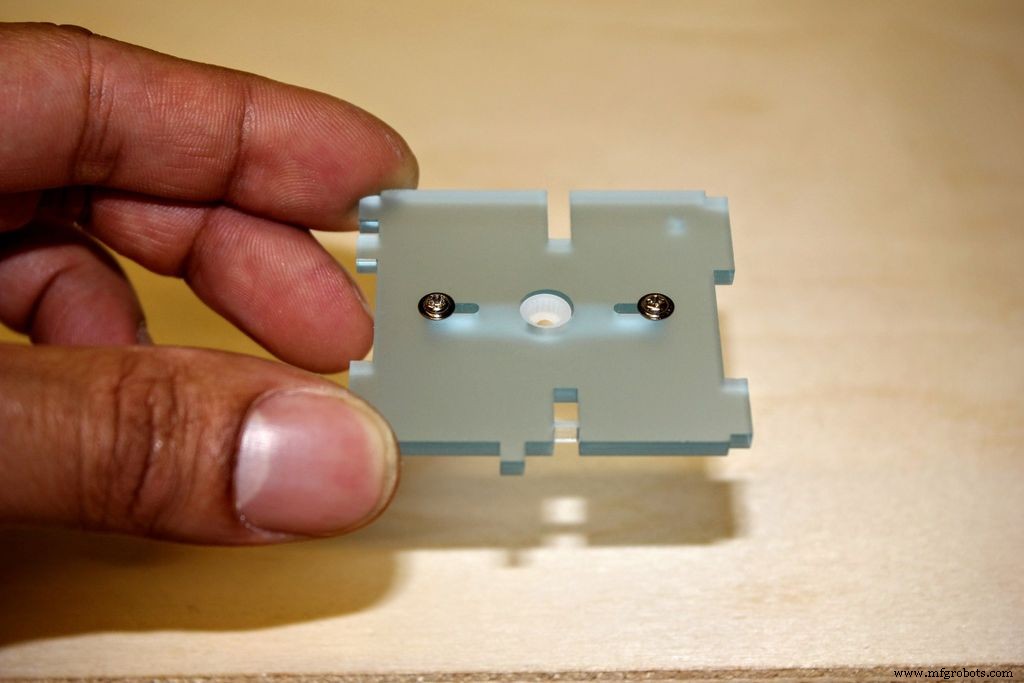
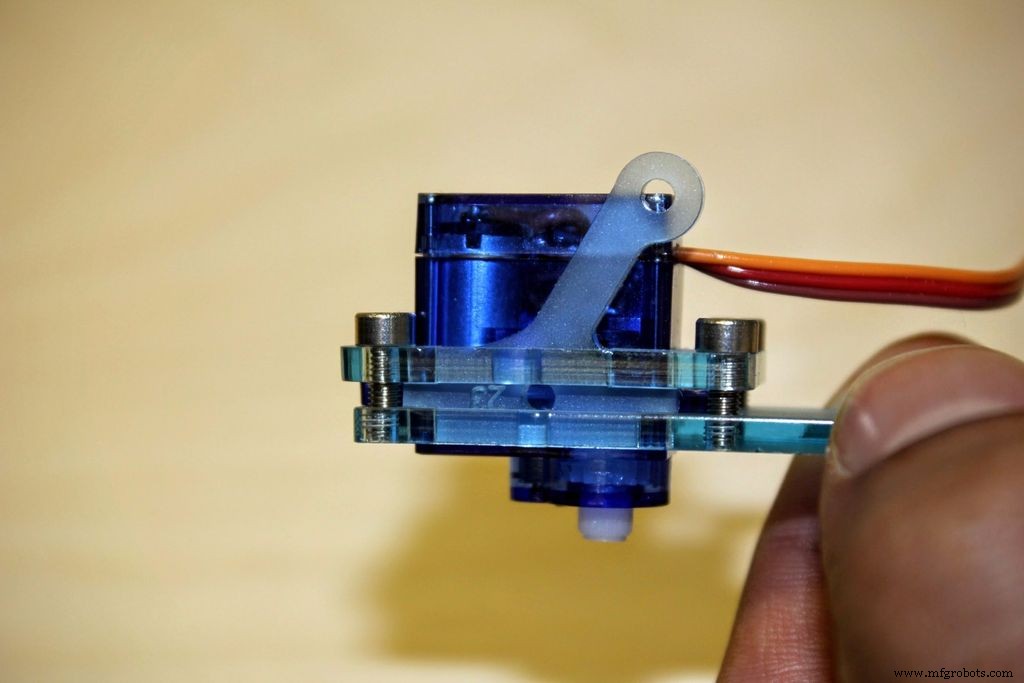
Теперь прикрепите фиксатор сервопривода (белая штука, они называются рогами) к рычагу сервопривода (№6), используя острые винты из набора для фиксации сервопривода. Они будут автоматически вставляться в белый пластиковый рог сервопривода. Они могут быть немного сложными, поэтому будьте осторожны. Если вы строите вместе с ребенком, то вам нужно вовремя принять участие.
Прикрепите фиксатор сервопривода к откалиброванному сервоприводу, как показано, оно должно быть параллельно самой длинной стороне детали №4, а линии, которые вы нарисовали ранее, должны совпадать. Используя небольшой крепежный винт из сервопривода, закрепите его на сервоприводе, но опять же не затягивайте слишком сильно!
Шаг 5. Правая сторона
Вот детали, которые нам нужны:
№ 5, № 12, № 13, № 17, два винта 8 мм, винт 6 мм, правый сервопривод и набор фиксаторов сервопривода.
Пропустите сервопривод через хомут, а кабель - через кабельную приборку, как прежде, прикрепите к боковой пластине с помощью 8-миллиметровых винтов, снова соблюдая осторожность, чтобы не сломать пластину из-за чрезмерного затягивания. Прикрепите белый рог сервопривода к рычагу сервопривода (# 13), используя острые винты, как раньше. Присоедините его к сервоприводу, повернув рычаг под углом 90 градусов к самой длинной стороне боковой пластины. Снова черные линии, которые вы нарисовали, должны выровняться.
Наконец, на этом этапе прикрепите деталь № 17 к боковой пластине с помощью винта 6 мм.
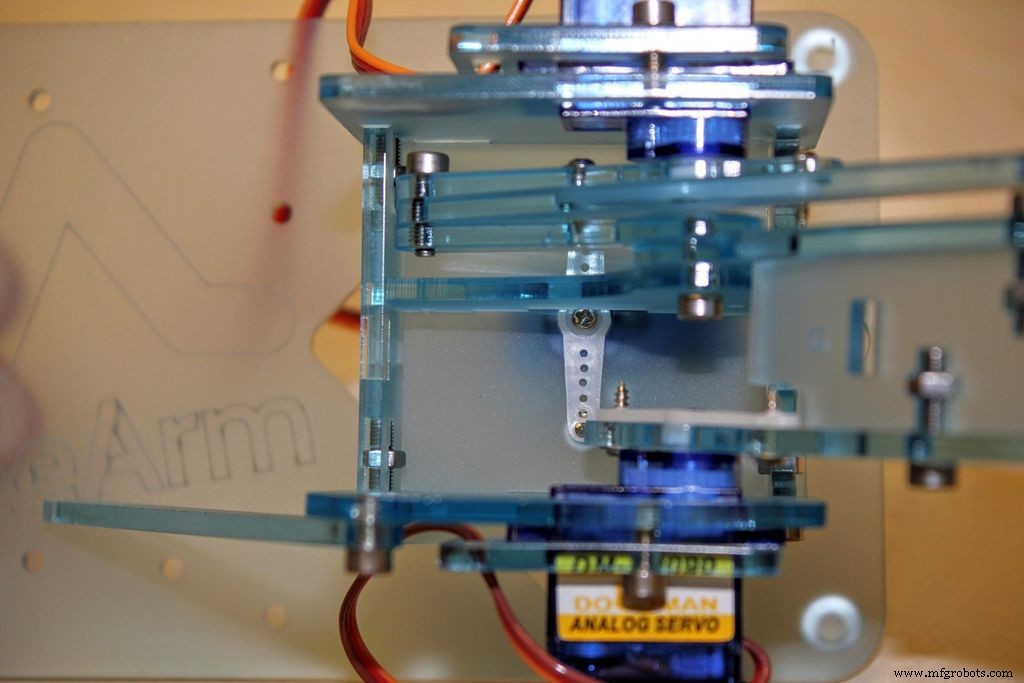
Шаг 6. Создайте середину
Эти части соединяют вместе левую и правую секции. Мы называем их базой и свиньей.
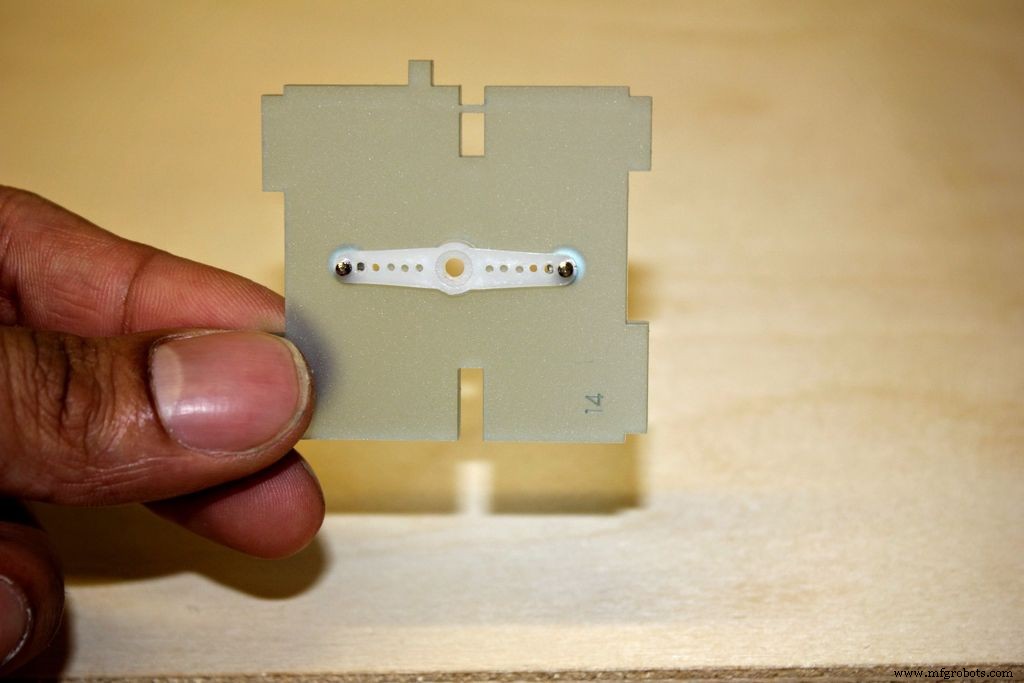
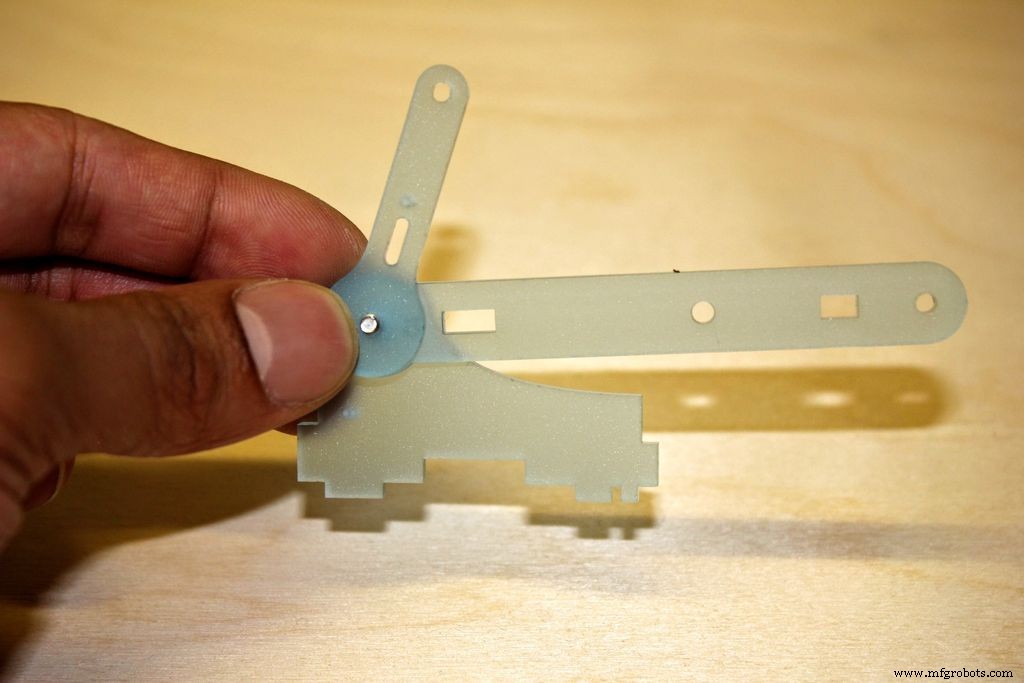
Для основания найдите деталь № 14 и набор фиксаторов сервопривода. Тщательно соблюдая ориентацию, прикрепите рог сервопривода с помощью острых винтов. На этом этапе поднесите его к левой боковой части, чтобы проверить, все ли у вас правильно. Пока-ярмо укажет вам путь сюда.
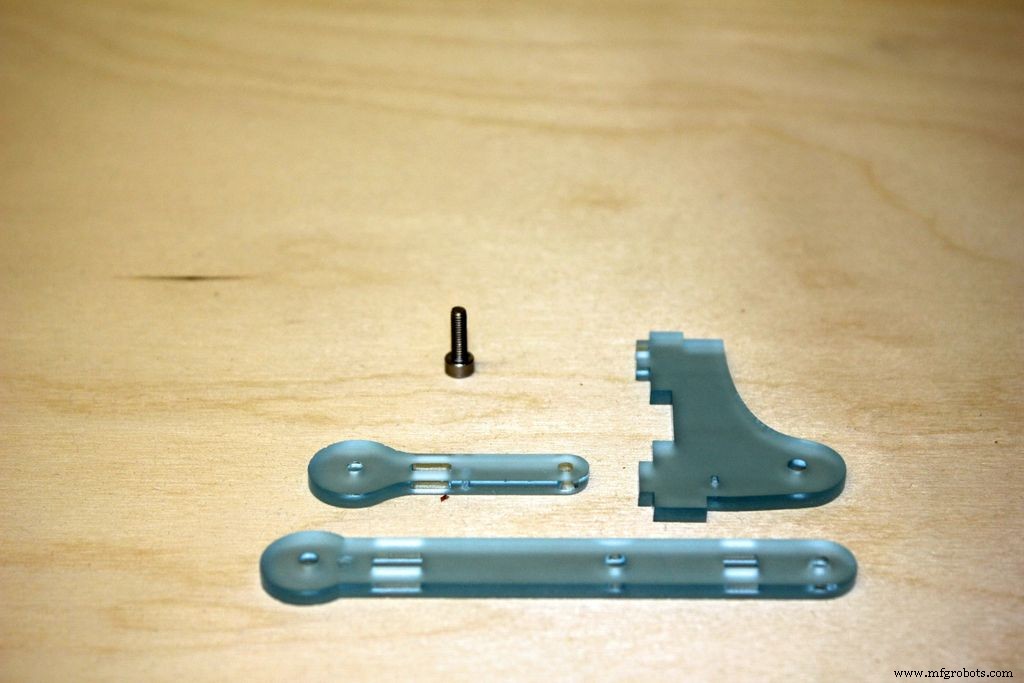
Для свиньи найдите детали №8, №9, №10 и 10-миллиметровый винт. Прикрутите их вместе в показанном порядке, который должен быть №9, №10, №8 с винтом, входящим со стороны №8 и саморезом в №9. Извините, что это сбивает с толку, но, честно говоря, я впервые записал это с числами! Важно, чтобы они двигались вокруг оси (винта) по прямой траектории и свободно перемещались. Если они не двигаются по прямому пути, отвинтите, удерживайте их вместе и снова закрутите так, чтобы все они были как можно параллельны.
Шаг 7. Слева в середину
Теперь мы хотим соединить левую и правую части вместе, используя средние части.
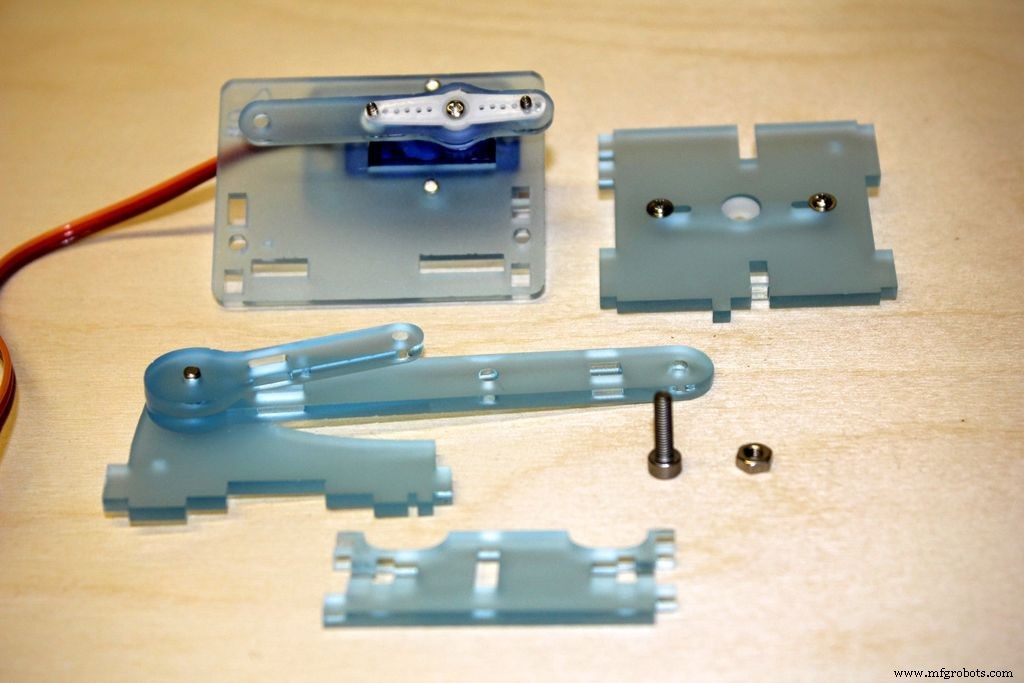
Сначала прикрепите левый узел к детали № 7 с помощью 12-миллиметрового винта и гайки. Самый простой способ сделать это - протолкнуть 12-миллиметровый винт через левый узел и повернуть гайку на пол-оборота или около того. Наденьте паз детали №7 на гайку и начните затягивать винт. Не затягивайте слишком сильно.
Вы должны увидеть прорезь для скребка на детали № 7 (передняя стойка). Поместите скребок в прорезь, затем вставьте основание в прорези на левой сборке и поднимите рычаг вверх, чтобы соединить прорези на скребке. Дважды проверьте здесь сервопривод, если он у вас перевернут, вы будете очень раздражены позже.
Установив скребок на место, вы можете прикрепить рычаг (# 17), дополнительную прокладку (# 20) к серворычагу (# 6) и рычаг на скребке (# 9) вместе с винтом 12 мм или 10 мм в зависимости от того, вам нужна распорка. Сервоприводы Doman, показанные здесь, не требуют проставки, в отличие от последних используемых нами сервоприводов. Для этого в нашем пакете есть запчасти.
Теперь прикрепите заднюю стойку, деталь № 11, используя 12-миллиметровый винт и гайку, как на передней стойке. Он должен проходить над задней частью скребка, а также над выступом на опорной плите. Затяните его, но оставьте немного провисания, так как регулировка пригодится при стыковке правой части.
Шаг 8:прикрепите справа
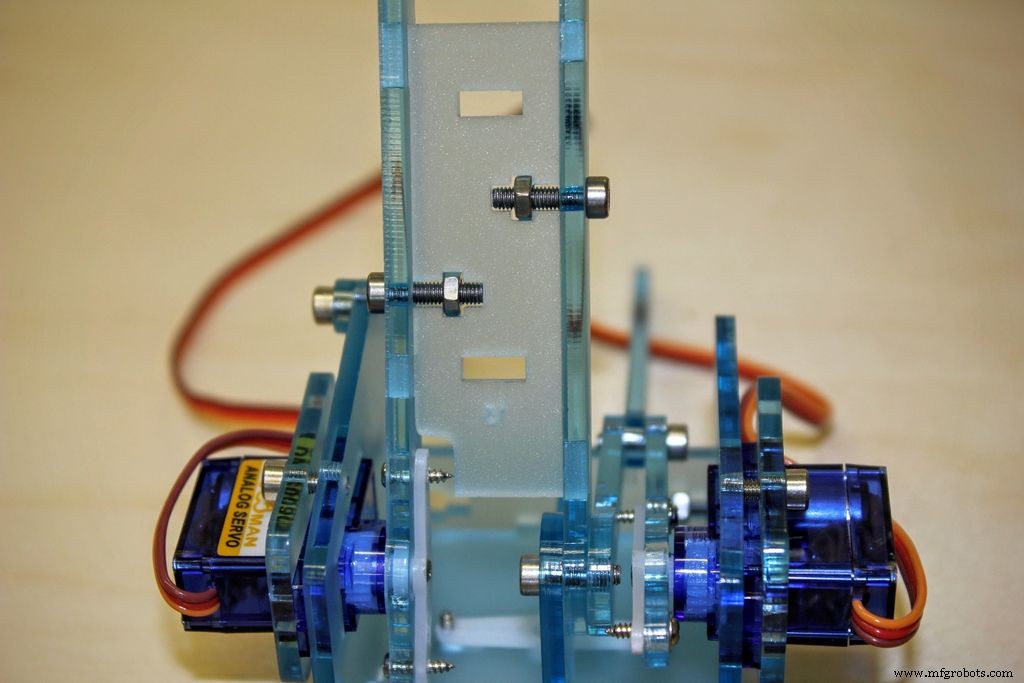
Теперь мы соединяем правую сторону с нашей сложной сборкой, это также включает в себя установку части лямки №15.
Присоедините деталь №15 к детали №10 (на скребке) с помощью 12-миллиметрового винта и гайки.
Теперь приступаем к прикреплению правой стороны к остальной части сборки. Вы можете продеть 12-миллиметровые винты и гайки через правую сторону, прежде чем пытаться состыковать детали, или вы можете оставить их и надеть после. Здесь вы пытаетесь разместить несколько деталей в слотах одновременно, и это может быть непросто
Не торопитесь и будьте терпеливы. Этот шаг самый сложный во всей сборке. Как только вы это сделаете, обещаю, станет легче!
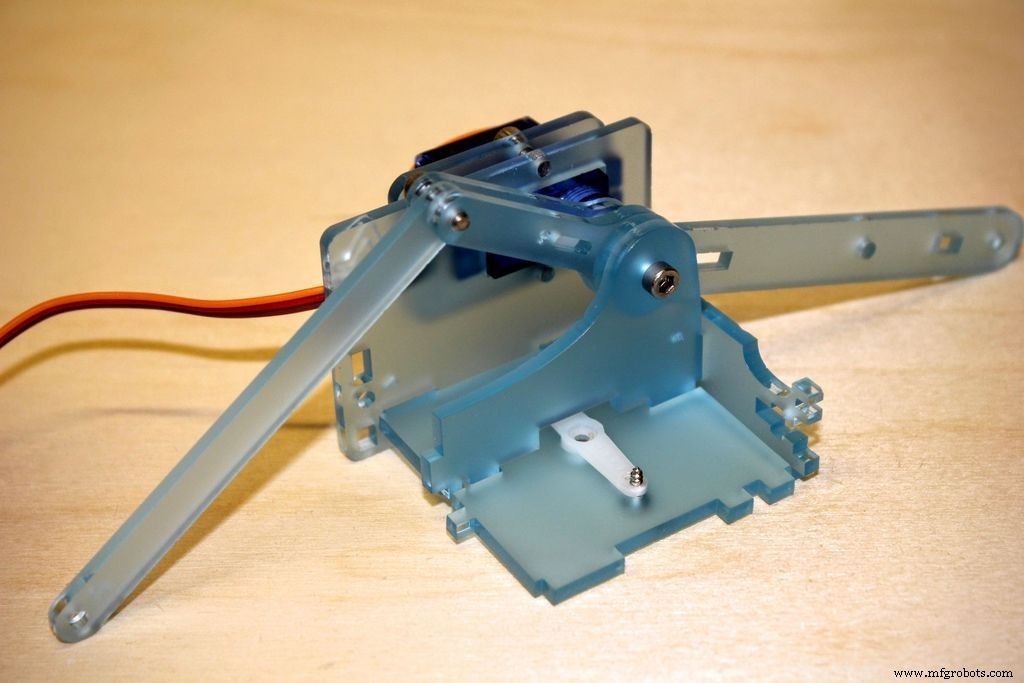
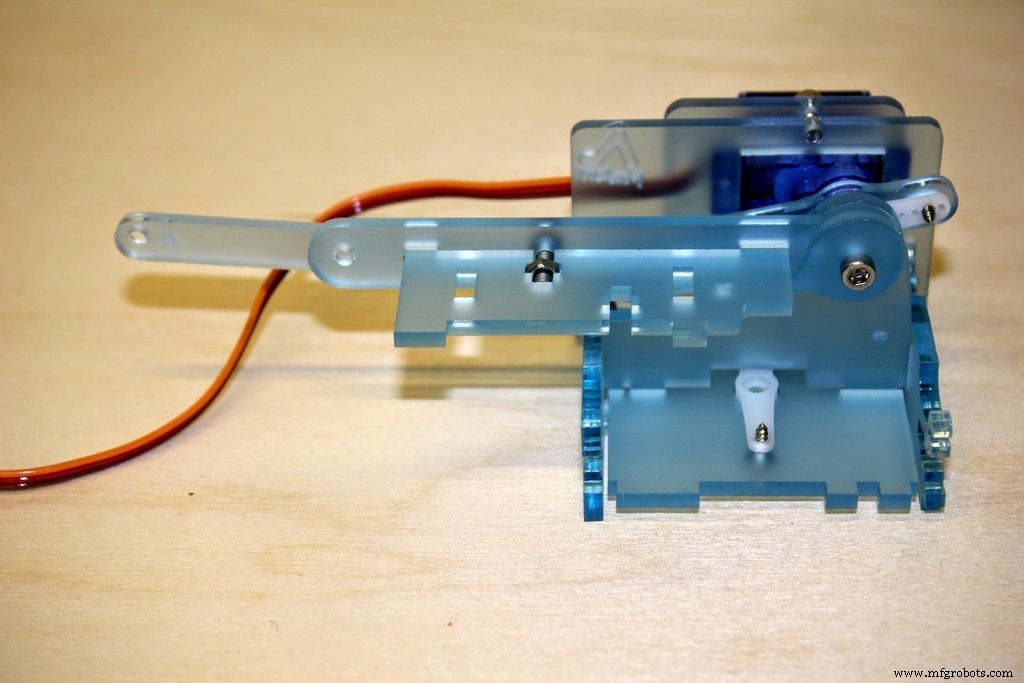
Шаг 9:Прикрепите к базе, добавьте левое предплечье
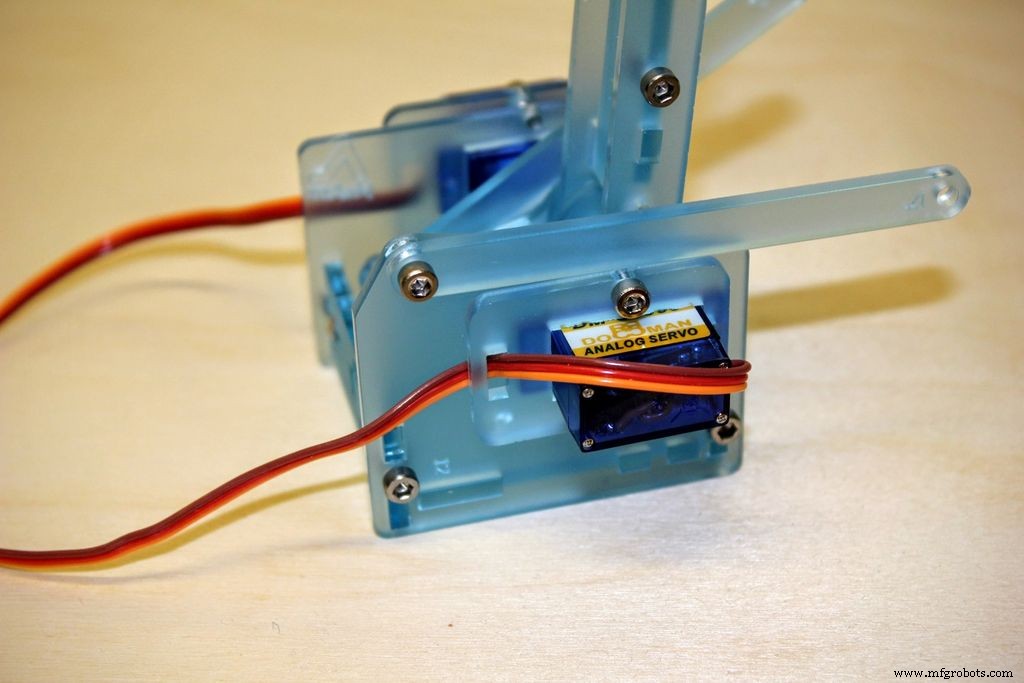
Теперь у нас есть прекрасная центральная сборка, и мы можем прикрутить ее к основанию.
Это вопрос соединения рупора сервопривода с центральным сервоприводом и закрепления винтом.
Теперь мы можем добавить деталь №16 с помощью двух 6-миллиметровых винтов. Он будет прикручиваться к деталям № 10 и № 17. Благодаря этой новой детали вы сможете легко перемещать сервопривод!
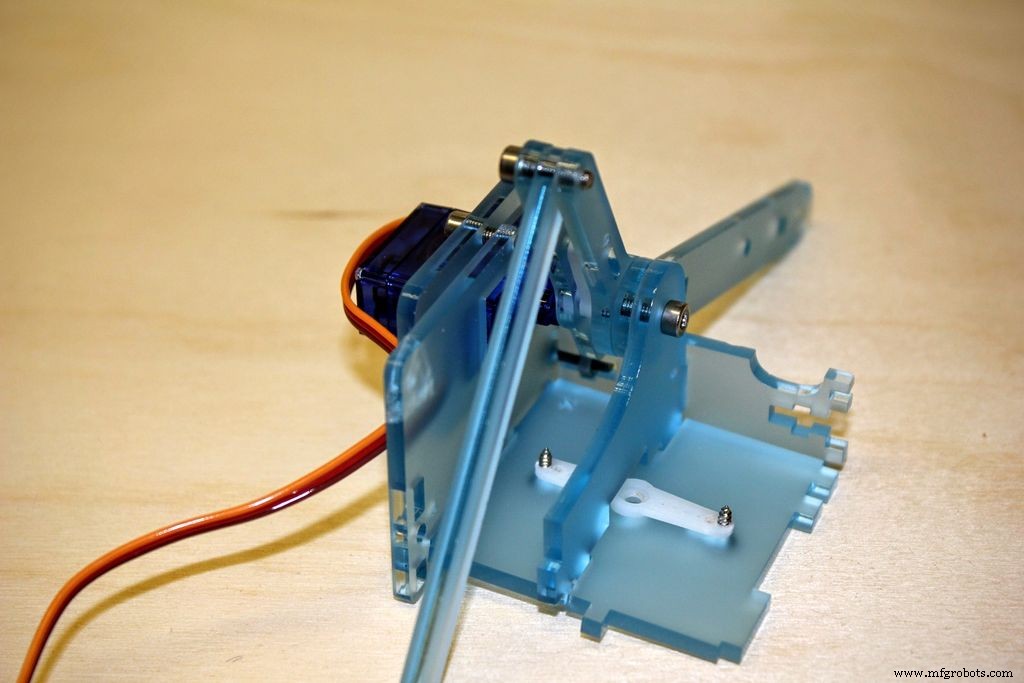
Шаг 10:правое предплечье
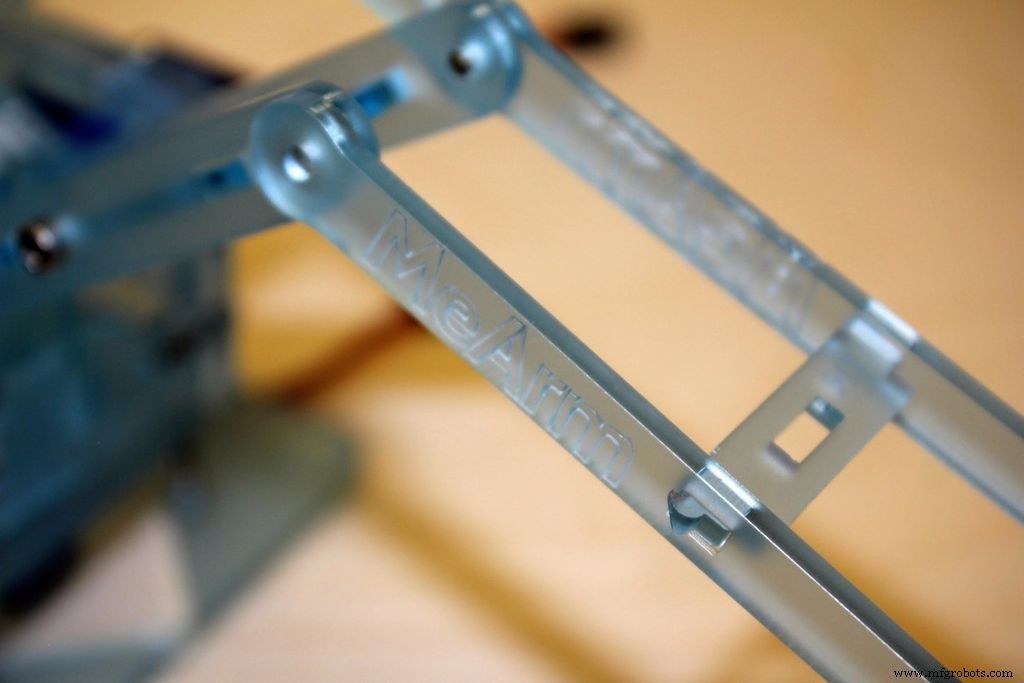


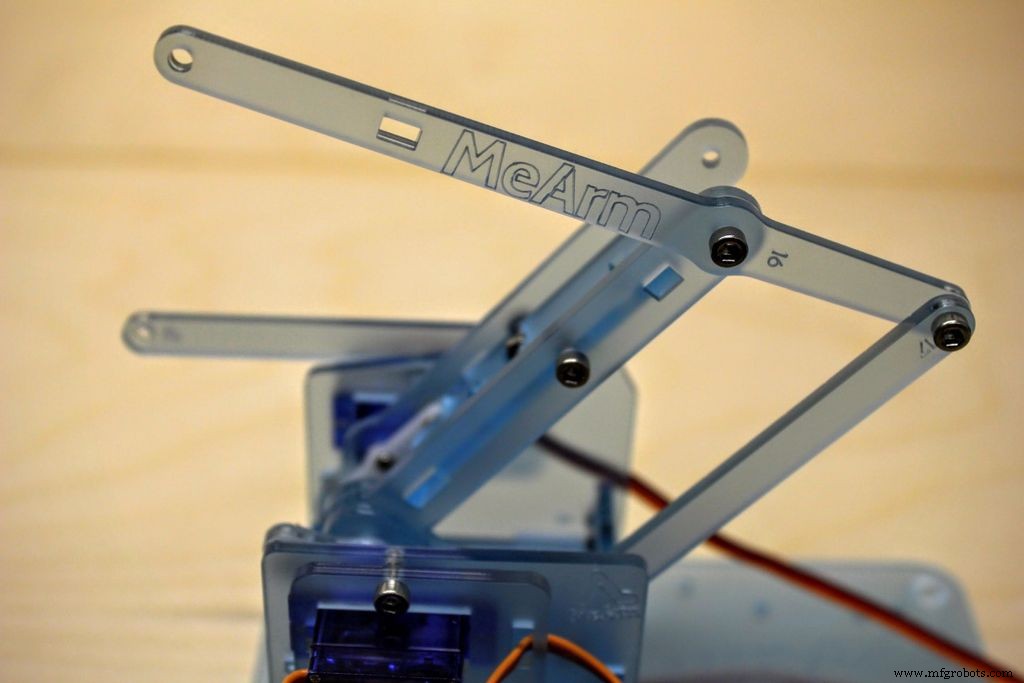
Далее строим правое предплечье.
Первое, что нужно сделать, это зацепить деталь №18 на левую часть предплечья, которую вы только что прикрепили, а затем на правое предплечье, которое мы назовем деталью №31, поскольку, похоже, она не пронумерована!
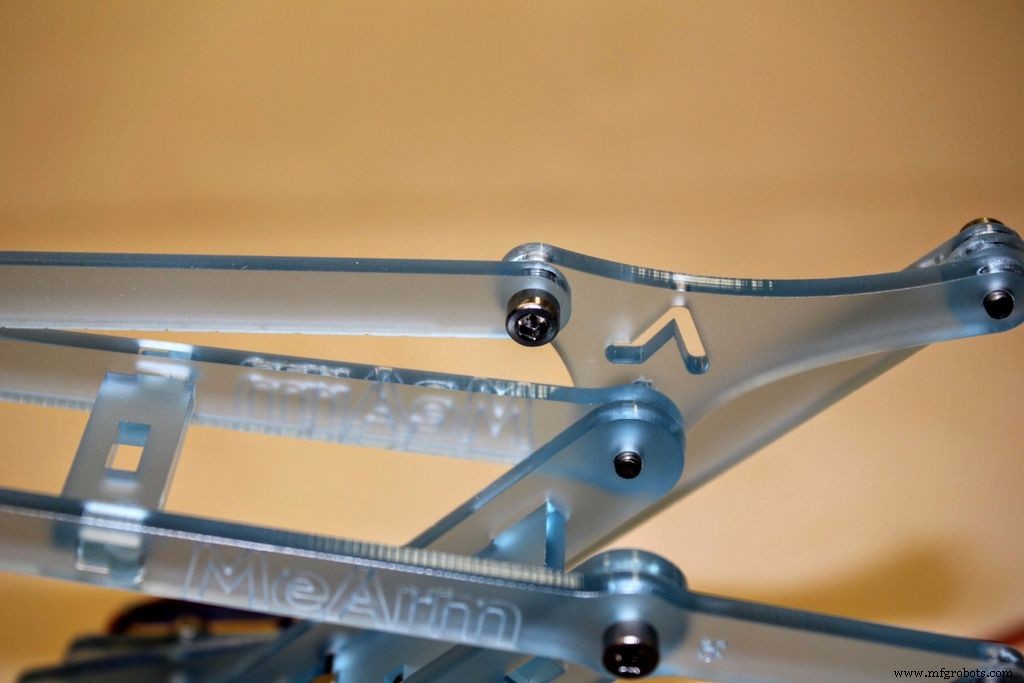
Присоедините треугольную деталь № 19 к детали № 31 и к детали № 13 (бит, которая прикреплена к сервоприводу) винтом 10 мм. Не затягивайте слишком сильно, так как нам нужно, чтобы все эти части двигались свободно.
Присоедините заднюю часть детали № 19 к детали № 17, прикрепленной к правой боковой пластине, используя 10-миллиметровый винт и проставку (№ 20) между ними.
Затем прикрепите последнюю деталь № 17 к внутренней передней части детали № 19 с помощью винта 6 мм.
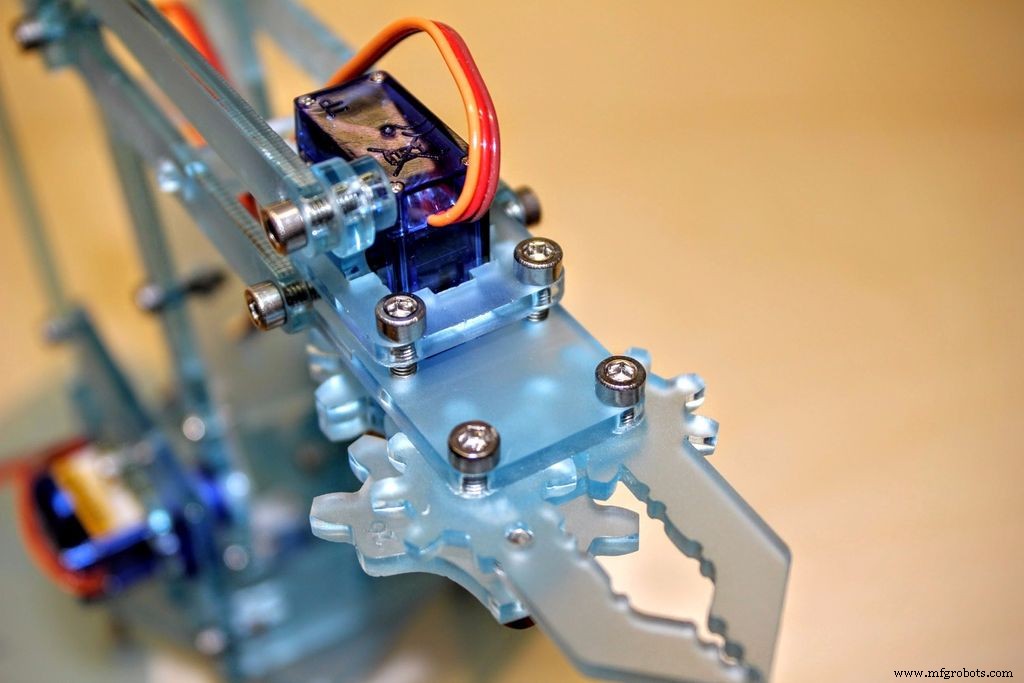
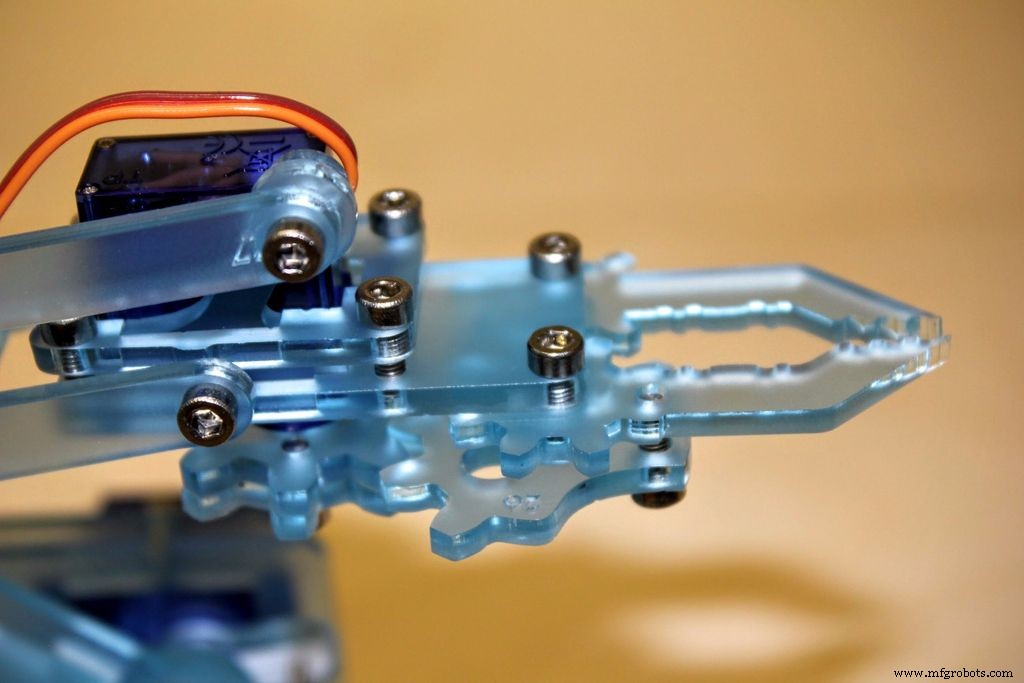
Шаг 11. Создайте коготь!
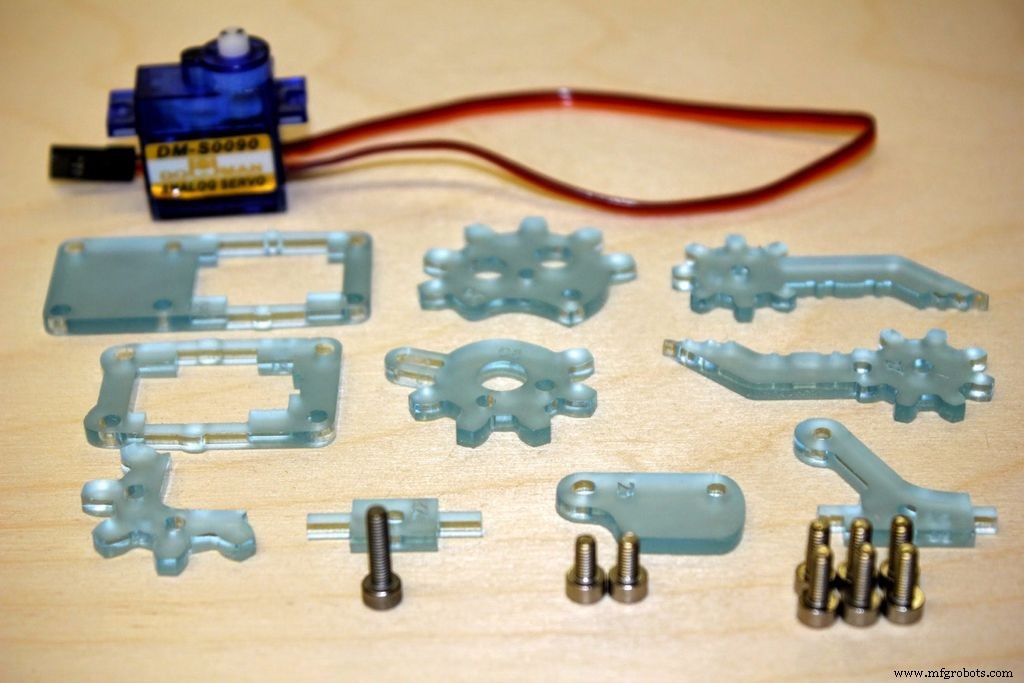
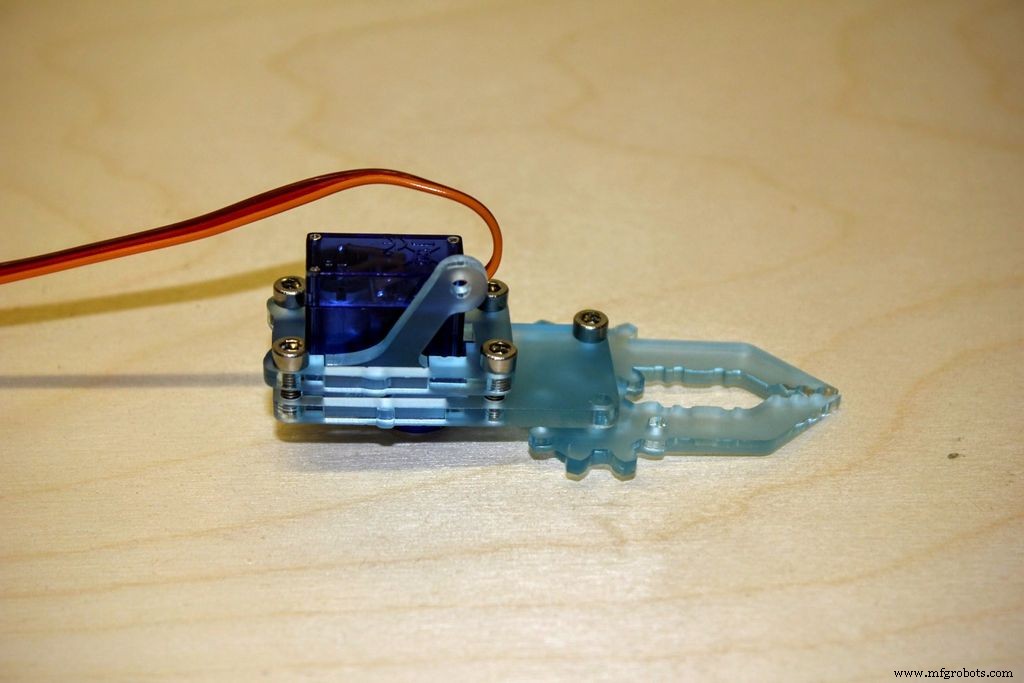
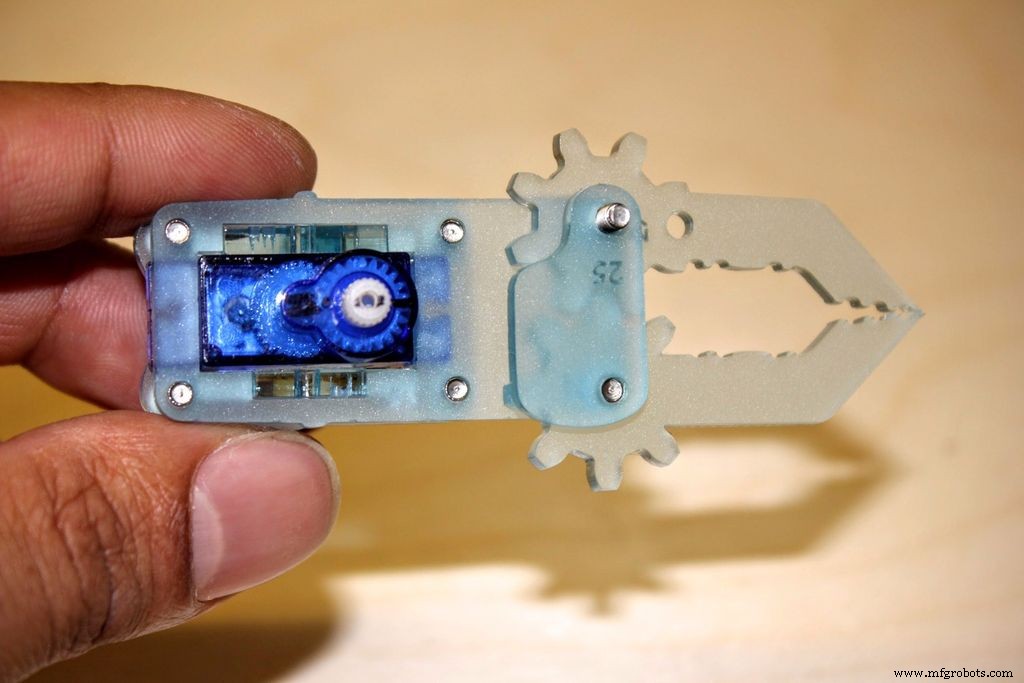
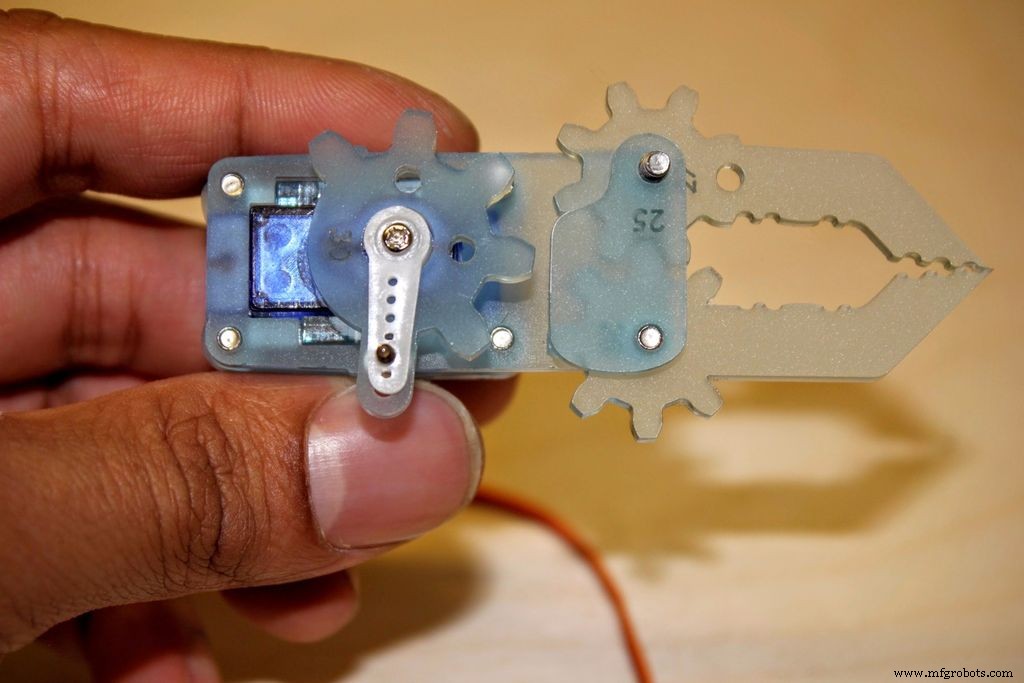
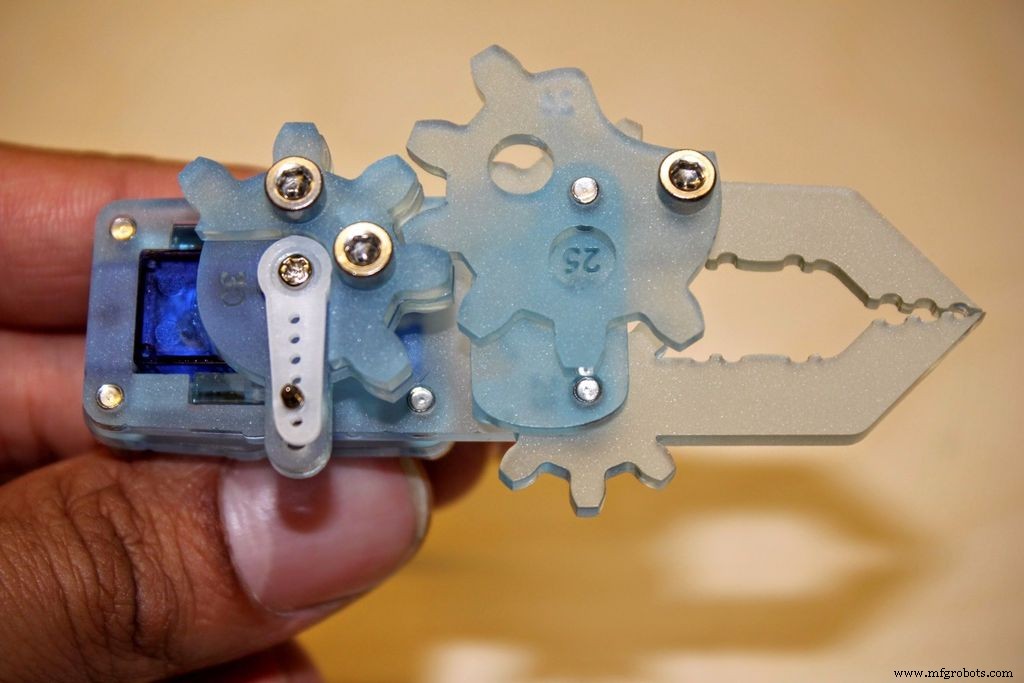
Проденьте сервопривод через оставшееся кольцо # 21. Вставьте детали №22 и №23 в боковые прорези, сделанные сервоприводом, и деталь №21, затем с помощью детали №24 закрепите их четырьмя 8-миллиметровыми гайками. Опять же, будьте осторожны, мы почти у цели, вы не хотите ничего ломать.
Следующие части будут немного незакрепленными, пока не будет установлен последний винт, поэтому не волнуйтесь, если вы что-то уроните сейчас. Закрепите деталь № 28 через левое отверстие на головке с помощью винта 8 мм в детали № 25. Затем зацепите шестерни на детали № 27 и проденьте через нее 12-миллиметровый винт, головку в сборе и деталь № 25. Это еще не безопасно, но держит его в секрете.
Присоедините рог сервопривода к детали № 30 и закрепите его на сервоприводе с помощью крепежного винта. Прикрепите № 29 к № 30 с помощью двух 6-миллиметровых винтов.
Теперь вы можете прикрепить № 26 к свободному 12-миллиметровому винту и прикрепить его к дополнительному отверстию в детали № 27 с помощью 8-миллиметрового винта.
Шаг 12:Добавьте голову
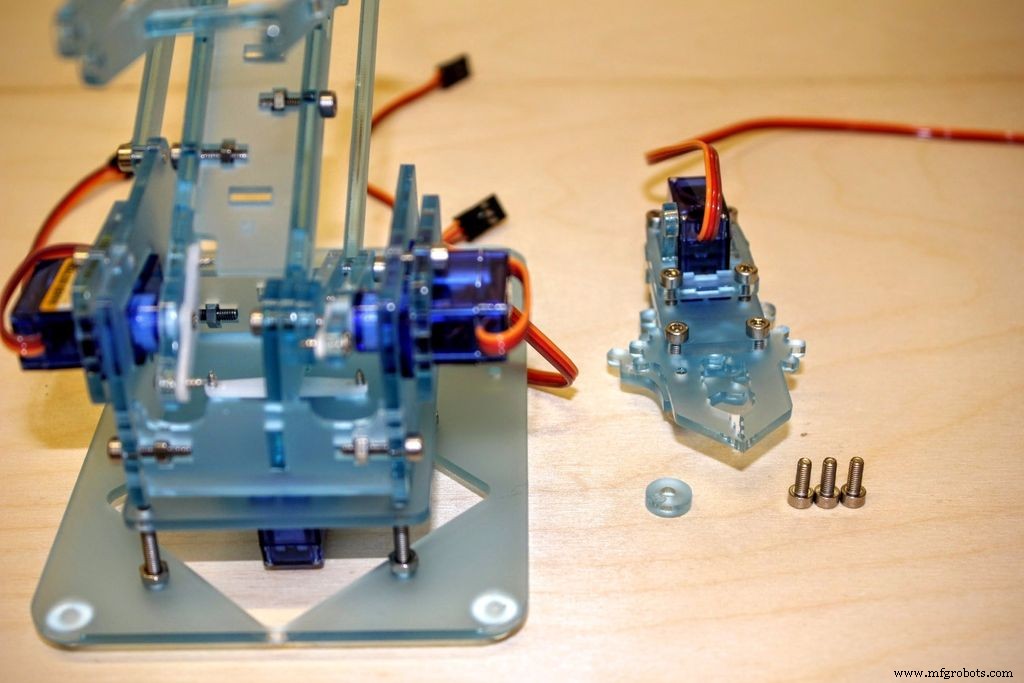
Последняя часть - прикрепить голову.
Это крепится двумя винтами 8 мм через предплечья к частям №22 и №23 на голове. Возможно, вам будет проще ослабить 8-миллиметровые винты на зажиме сервопривода головки.
А теперь включай и играй!
Шаг 13:Устранение неполадок
Этот раздел со временем будет заполняться общими проблемами. Если он у вас есть, дайте нам знать, и мы сможем его добавить.
Левый рычаг сервопривода застрял. Обычно это связано с жестким суставом. Люди забывают о насадке для сборки головы.
Код
- Файл без названия
Файл без названия Arduino
#includeСерво средний, левый, правый, коготь; // создает 4 "сервообъекта" void setup () {Serial.begin (9600); средн. прикрепить (11); // прикрепляет сервопривод на выводе 11 к среднему объекту left.attach (10); // прикрепляет сервопривод на выводе 10 к левому объекту right.attach (9); // прикрепляет сервопривод на выводе 9 к правому объекту claw.attach (6); // прикрепляет сервопривод на выводе 6 к объекту «коготь»} void loop () {middle.write (90); // устанавливает положение сервопривода в соответствии со значением (в градусах) left.write (90); // делает то же самое правильно .write (90); // и снова claw.write (25); // да, вы догадались delay (300); // не обновляет постоянно сервоприводы, которые могут их поджарить}
Создатель кода
https://codebender.cc/sketch:148456Изготовленные на заказ детали и корпуса
Производственный процесс
- Портальный робот:автоматизация самых больших приложений
- Технический документ:как определить потенциал своего робота
- Важность безопасности роботов на заводе
- Создание собственной руки-робота:стоит ли рисковать?
- Робот SCARA с двумя руками
- Рука робота, управляемая через Ethernet
- Littlearm 2C:создание напечатанной на 3D-принтере руки робота Arduino
- Вебинар:автоматизируйте свой процесс с помощью робота Techman
- Токарный центр с манипулятором
- Robot сочетает в себе манипулятор для совместной работы с мобильной платформой