


Гибкий и растягиваемый волновод на основе нанорешетки для тактильного восприятия
Аннотация
На основе соответствующих характеристик оптического волновода и гибких оптических материалов предлагается гибкая и растягиваемая структура оптического волновода, ориентированная на тактильное восприятие. Принцип действия оптического волновода основан на механической деформации, вызванной потерей выходного света. Он преодолевает недостатки традиционных оптических волноводных устройств, которые не могут соответствовать неровной поверхности. Гибкий и растягиваемый оптический волновод изготавливается методом нанорепликации и применяется для измерения давления и деформации в области тактильного восприятия. Гибкий и растягиваемый оптический волновод имел диапазон обнаружения деформации от 0 до 12,5%, а диапазон обнаружения внешней силы от 0 до 23 × 10 –3 Н.
Введение
Оптический волновод - это структура, которая направляет передачу световой волны [1,2,3,4]. Обычные жесткие оптические волноводы не могут соответствовать требованиям гибкой электроники и мягкой робототехники [5,6,7]. Гибкие и растягиваемые устройства будут важной частью роботизированной системы тактильного зондирования, которая может реализовать восприятие взаимодействия человека и машины, и обладает высокой степенью гибкости, растяжимости, адаптируемости, чувствительности, биосовместимости и невосприимчивости к электромагнитным помехам [8, 9,10,11,12]. Wang et al. изготовлены гибкие биоинспирированные датчики давления на основе биокомпозитной пленки Ti3C2 / MC с чувствительностью к давлению 24,63 кПа −1 , а шелковая пленка Fibroin-MXene также использовалась в качестве датчика давления с биосовместимостью и высокой производительностью [13, 14]. Ран и др. изготовили гибкую биомиметическую систему усиления инфракрасного (ИК) обнаружения для высококонтрастной визуализации инфракрасного света, а пиковая светочувствительность может достигать 7,6 × 10 4 при длине волны 1342 нм [15]. Гибкий и растягиваемый оптический волновод на основе структуры с нанорешетками может быть превращен в тактильные сенсорные устройства с гибкостью и растяжимостью, и он имеет широкое применение в области носимой электроники и робототехники. Ли и др. изготовили гибкий волновод на основе изгибаемого халькогенидного стекла, и теория множества нейронных осей была использована для оптимизации распределения деформации [16]. Кроме того, стеклянный волновод был спроектирован в форме змеевика с растяжимостью, равной 42% деформации при растяжении. Помимо новых гибких оптических материалов, для изготовления гибких и растягиваемых волноводов использовались многие современные технологии изготовления [17, 18]. Samusjew et al. изготовили фотополимеризационный гибкий и растягиваемый оптический волновод с помощью струйной печати, и волновод имел растяжимость 120% [19]. Для достижения гибкости и растяжимости оптических волноводных устройств на основе структур с нанорешетками необходимы новые мягкие материалы с оптической прозрачностью в качестве краеугольных камней. В настоящее время постоянно разрабатываются новые материалы, используемые для изготовления гибких и растягиваемых устройств восприятия фотонов [11, 20]. У них есть несколько общих характеристик, включая прозрачность, гибкость и растяжимость. Эти новые оптические мягкие материалы можно разделить на следующие категории:эластомеры, коллоидные кристаллы, гидрогели и синтетические опалы [21,22,23]. С постепенным развитием гибких и растягиваемых оптических волноводов на основе гибких оптических материалов и технологий микро- / нанопроизводства, применение гибких и растягиваемых оптических волноводов в тактильном восприятии, носимой электронике и личной диагностике здоровья постепенно расширяется. Андреас и др. использовали полистирол в качестве покрывающего слоя и фторированный полимер в качестве передающего слоя для изготовления сверхвысокой растяжимости и упругопластичности оптических волноводных датчиков, предел прочности которых может превышать 300% [24]. Александр и др. использовали голографическую технологию и метод УФ-отверждения для изготовления гибкой дифракционной решетки света на материале PDMS, смешанном со светочувствительными молекулами бензофенона [25]. Хотя многие исследователи внедрили гибкий или растягиваемый оптический волновод, исследований гибкого и растягиваемого оптического волновода мало, особенно в области тактильного распознавания роботами.
В этой статье новый гибкий и растягиваемый оптический волновод был разработан и изготовлен с помощью процесса формования нанорепликата. Гибкий и растягиваемый оптический волновод является важным тактильным сенсорным устройством и может использоваться для определения давления и деформации в носимых устройствах и в медицинских целях. Гибкий растягиваемый волновод был изготовлен на кремниевой эталонной пластине с PDMS в качестве подложки. Мастер-пластина с нанорешеткой использовалась для создания решетчатых структур на оптическом волноводе в качестве входных / выходных элементов связи. Все связанные параметры были проанализированы и рассчитаны в процессе изготовления. Изготовленный гибкий и растягиваемый оптический волновод применялся для измерения давления и деформации в области тактильного восприятия.
Методы
Принцип гибкого и растягиваемого волновода
Для гибкого и растягиваемого оптического волноводного датчика показатель преломления управляемого слоя равен n waveguide . а коэффициент преломления волновода внешней среды равен n external , который удовлетворяет следующему соотношению:
$$ n_ {волновод}> n_ {внешний} $$ (1)В этой статье PDMS выбран в качестве слоя оптического волновода, а его коэффициент преломления составляет 1,41, что выше, чем коэффициент преломления воздуха 1,0, поэтому его можно использовать в качестве простого оптического волновода. Реализация тактильного зондирования требует, чтобы гибкий и растягиваемый оптический волновод, основанный на тактильном зондировании, мог определять различные физические параметры (давление, деформацию и т. Д.) Окружающей среды. Когда на гибкое и растяжимое оптическое волноводное чувствительное устройство воздействует внешняя среда, интенсивность выходной световой мощности неразрывно связана с механическими возмущениями, вызванными напряжением или деформацией. В соответствии с изменением интенсивности выходного света может быть установлена деформация гибкого и растягиваемого оптического волновода, вызванная внешней силой окружающей среды. Вычислив изменение интенсивности выходного света, можно количественно измерить внешние физические изменения.
Принципиальная схема гибкого и растягиваемого оптического волноводного чувствительного устройства, показанного на рис. 1а. Часть гибкого и растягиваемого оптического волновода включает:1, гибкую и растягиваемую пленку оптического волновода; 2, периодическая глубина нанорешетки; 3, длина оптического волновода; 4 Период нанографирования; 5, ширина наночастиц; 6, вход с решеткой, 7, выход с решеткой. Решетчатое соединение гибкого и растягиваемого оптического волновода состоит из части 6 - области связи решеток и части 7 - области связи решеток для входной и выходной интенсивности света. Измерение оптического волновода выполняется гибким растягиваемым оптическим волноводом с внешними физическими величинами (давлением, деформацией и т. Д.) Для получения соответствующей зависимости между интенсивностью выходного света и изменениями внешних физических величин, как показано на рис. 1b. .
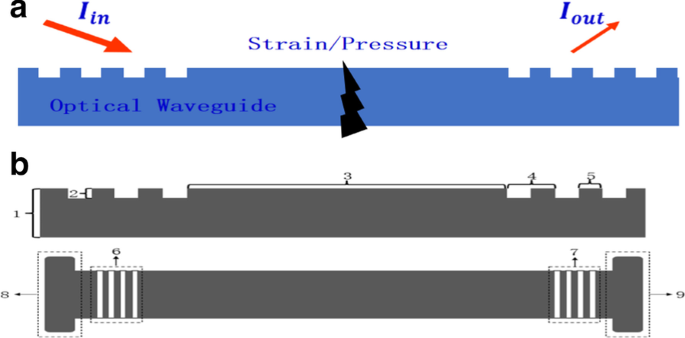
а Принцип измерения давления и деформации, b Схема гибкого растягиваемого оптического волновода
Когда пучок световой волны вводится в оптический волновод из решетчатого ответвителя под определенным углом, он проходит на расстояние L в оптическом волноводе, а затем выводится через выходную решетчатую ответвитель. Предполагается, что интенсивность выходного света I 0 . Когда гибкая и растягиваемая структура оптического волновода деформируется под действием приложенного внешнего давления F или деформации S, соответствующее изменение интенсивности света на выходе оптического волновода составляет ΔI 0 , поэтому соотношение между интенсивностью выходного света и давлением составляет:
$$ \ Delta I_ {0} =f \ left (F \ right) $$ (2)Связь между изменением интенсивности света и приложенной деформацией:
$$ \ Delta I_ {0} =f \ left (S \ right) $$ (3)Результаты моделирования и анализ
Гибкий и поддающийся растяжению материал конструкции оптического волновода представляет собой мягкий материал, обладающий гибкостью и растяжимостью. Когда гибкий растягиваемый оптический волновод выполняет тактильное распознавание, устройство может быть повреждено или работать неправильно из-за напряжения, возникающего в процессе деформации. Следовательно, при производстве гибких и растягиваемых оптических волноводов необходимо выполнять статическое моделирование фотонно-кристаллических структур, изготовленных из различных материалов, и анализировать распределение внутренних напряжений и деформаций в структуре, когда она подвергается воздействию внешней силы, вызывающей деформацию растяжения. . Для моделирования методом конечных элементов использовалась программа ABAQUS. Параметры модели были установлены следующим образом:период решетки 850 нм, скважность 0,5, толщина материала 2 мм, высота решетки 200 мкм, модуль Юнга 1 МПа, коэффициент Пуассона 0,48, плотность ПДМС установлена на 0,98 г / см. 3 . Нагрузка определяется как растягивающее смещение, приложенное к обеим сторонам оптического волновода, а другие направления фиксированы, что означает, что устройство растягивается на 10% в горизонтальном направлении. Диаграмма модального распределения напряжения – деформации оптического волновода PDMS показана на рис. 2. Из рис. 2а видно, что морфологические изменения деформации в основном распределяются в нижней части структуры решетчатого слоя, а деформация составляет распределены симметрично и более равномерно с обеих сторон. Концентрация напряжений в основном находится в той части, где соединяются решетчатая и блочная конструкции, а максимальное напряжение составляет менее 0,13 МПа, как показано на рис. 2b. Анализ механического моделирования показывает, что волновод с решетчатой структурой на основе PDMS имеет очень хорошие свойства при растяжении, а эксперимент по моделированию подтверждает стабильность функции измерения деформации гибкой и растягиваемой структуры оптического волновода.
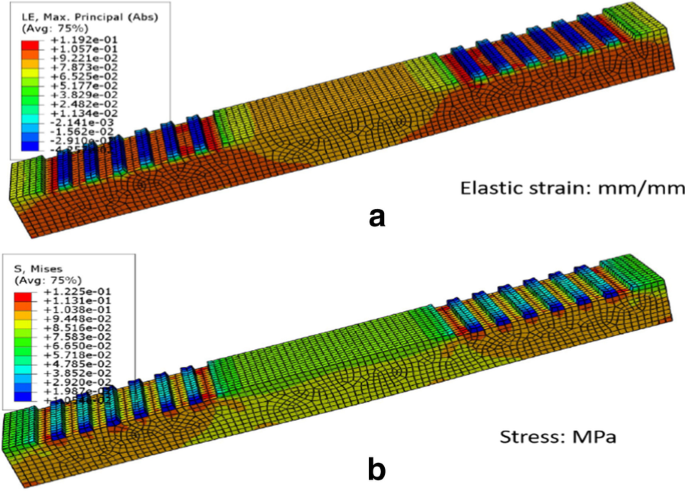
Конечно-элементное моделирование гибкого растягиваемого волновода: a Упругая деформация; б Стресс
Принцип восприятия тактильного датчика с гибким оптическим волноводом заключается в том, что, когда свет вводится в оптический волновод и проходит, потери передачи света возникают из-за внешнего напряжения и деформации, а цель измерения напряжения и деформации достигается путем вычисления потерь. Следовательно, для разработанного устройства оптического волновода на основе структуры с нанорешеткой требуется моделирование электрического поля для проверки состояния пропускания света в оптическом волноводе. В эксперименте по электромагнитному моделированию для анализа и проектирования используется программное обеспечение электромагнитного моделирования FDTD. Поскольку разработанный оптический волновод представляет собой симметричную структуру, в качестве объекта исследования выбраны решетчатые ответвители на обоих концах. Рабочий цикл решетки 0.5, период решетки, высота решетки. Его основная структура показана на рис. 3а. Когда гауссовы лучи красного света вводятся в оптический волновод под углом падения 13,54 градуса, большая часть луча белого света может попадать в оптический волновод и распространяться вдоль горизонтального направления оптического волновода. Эксперимент подтвердил, что, когда луч входит в оптический волновод под определенным углом падения, луч может частично распространяться в оптическом волноводе и выходить наружу, как показано на рис. 3b.
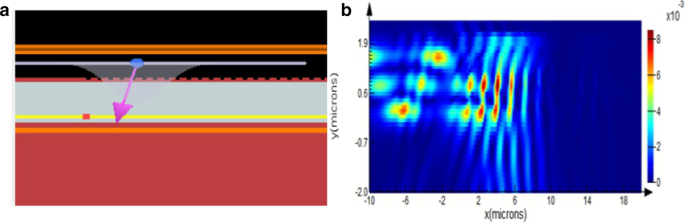
а Структура моделирования процесса световой связи, b электромагнитное распределение входящего света
Изготовление
Режим входа и выхода гибкого и растягиваемого оптического волновода - это решетчатая связь, которая изготавливается методом нанорепликации с использованием Si-шаблона решетки. Гибкие оптические материалы, которые могут использоваться для изготовления гибких и растягиваемых оптических волноводов, включают PDMS, SU8, PMMA и гибкое халькогенидное стекло. Процесс изготовления гибкого и растягиваемого волновода выглядит следующим образом:(1) Шаблон мастер-пластины. Шаблон нанорешетки имеет период решетки 850 нм, коэффициент заполнения 0,5 (LightSmyth Technologies, Inc.). (2) Модификация поверхности. Подготовленный шаблон кремниевых пластин помещали в гидрофобный силан и вымачивали на 15 мин. Затем его очищали IPA и сушили газообразным азотом, чтобы изменить поверхностные свойства шаблона Si-решетки (с гидрофильных на гидрофобные). (3) Жертвенный слой. Раствор поливинилового спирта (ПВС) (концентрация 10%) был нанесен методом центрифугирования на 4 '' кремниевую пластину, а затем высушен при 75 0 C в течение 30 мин. 4. Шаблон решетчатого волновода. Две Si-решетки 855 нм были помещены поверх временного слоя ПВС. Убедитесь, что ориентация двух шаблонов решеток одинакова, решетки направлены вверх, а расстояние между шаблонами соответствует относительному расстоянию. (5) Покрытие неотвержденного ПДМС. Смешивание неотвержденного ПДМС и отвердителя в соотношении 10:1. Затем неотвержденный ПДМС перемешивают до равномерного перемешивания. После этого смесь помещают в вакуумный бокс и дегазируют в течение 10 мин. Наконец, неотвержденный PDMS наносится методом центрифугирования на решетчатый волноводный шаблон. (6) Зачистка волновода на основе PDMS. Поместите оптический волновод, затвердевший на ПВС, в воду и купите в течение 10 ч для растворения ПВС. Извлечение гибкого растягиваемого оптического волновода и отслаивающегося волновода от шаблонов с кремниевой решеткой, как показано на рис. 4. Размер гибкой и растягиваемой структуры оптического волновода, разработанной в этой статье, можно регулировать. В последующих приложениях исследователи могут регулировать структурный размер оптического волновода в соответствии со своими требованиями. Гибкий и растягиваемый оптический волновод можно регулировать, главным образом, в следующих двух аспектах:(1) уменьшить размер Si-шаблона; (2) уменьшить расстояние передающего слоя решетки. С помощью двух вышеуказанных методов размер гибкого и растягиваемого оптического волновода может быть адаптирован и изготовлен в соответствии с потребностями упаковки.
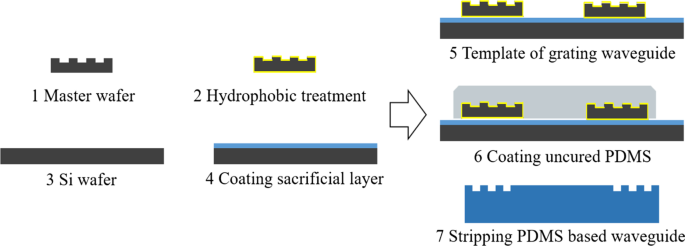
Процесс изготовления гибкого и растягиваемого оптического волноводного датчика Nanoreplica
Структура нанорешетки изготовлена путем масштабного копирования и формования. Выбранный шаблон кремниевой решетки имеет период 850 нм, рабочий цикл 0,5 и высоту решетки 200 нм, как показано на рис. 5a. Качество морфологии нанорешетки определяет эффективность связи входящего и выходного света. АСМ-изображение нанорешеток на основе формования реплик показано на рис. 5b. Из рисунка видно, что структура нанорешетки может быть перенесена с шаблона кремниевой решетки на подложку PDMS с хорошей консистенцией. Можно сделать вывод, что выбранный метод формования нанореплик может удовлетворить требованиям изготовления гибких и растягиваемых оптических волноводов.
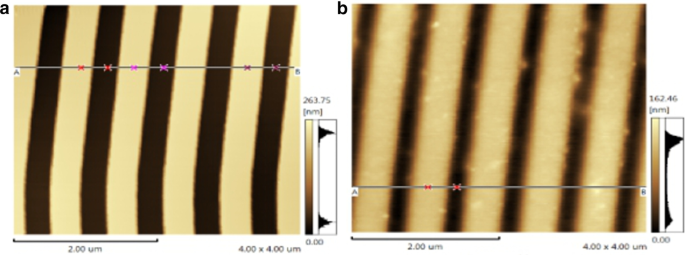
АСМ изображения нанорешеток: а Шаблон Si-нанорешетки, b формовочные решетки нанореплика на ПДМС
Результаты и обсуждение
Платформа обнаружения
Чтобы измерить напряжение и деформацию для тактильного восприятия с помощью гибкого и растягиваемого волновода, была построена гибкая платформа для тактильного восприятия. Вся экспериментальная платформа с гибким и растягиваемым оптическим волноводом показана на рис. 6а и в основном включает в себя следующий процесс:(1) Источник падающего света. В качестве падающего света выбрана лазерная точка с длиной волны 632,8 нм. (2) Устройство регулировки положения и положения источника света. Это механическое устройство, используемое для фиксации положения источника падающего света и регулировки его угла падения в реальном времени. (3) Устройство измерения растяжения. Устройство измерения растяжения, состоящее из штангенциркуля Вернье и нестандартных фиксированных деталей, которое можно использовать для точного измерения начальной длины гибкого и растягиваемого оптического волновода и соответствующего изменения длины растяжения в эксперименте. (4) Фотоприемник. Фотодетектор PM100D (Thorlabs, Inc.) имеет диапазон обнаружения интенсивности света от 500 нВт до 500 мВт. В этой экспериментальной платформе фотодетектор используется для обнаружения изменения интенсивности выходного света на гибком и растягиваемом оптическом волноводе на основе PDMS, и соответствующие давление и деформация могут быть рассчитаны на основе величины изменения интенсивности выходного света. Эта экспериментальная платформа для тактильного зондирования имеет низкую стоимость, совместима и может использоваться для определения давления и деформации для тактильного зондирования. Точность деформации может достигать 0,1%, точность штангенциркуля - 0,02 мм. В то же время фотодетектор используется для обнаружения изменения интенсивности выходного света, а разрешение фотодиодного зонда составляет 10 ПВт. Гибкий и растягиваемый оптический волновод, изготовленный методом нанорепликации, показан на рис. 6. Цветная квадратная область - это входная и выходная часть гибкого и растягиваемого оптического волновода, а прозрачная область в средней области - это область пропускания света. Красочный эффект создается за счет дифракции света на поверхности решетки. Гибкий растягиваемый оптический волновод показан на рис. 6b, цветная область - это входной и выходной порт гибкого растягиваемого оптического волновода, а средняя прозрачная область - это область передачи оптического волновода. Цветное изображение входного и выходного порта связи решетки вызвано дифракцией света на поверхности решетки.
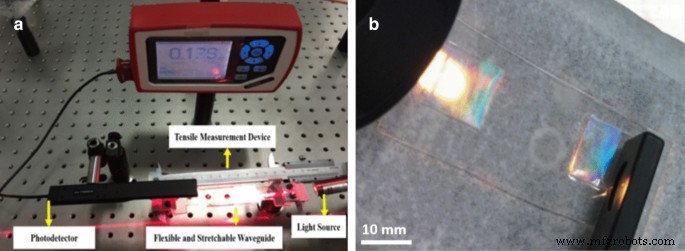
а Платформа тактильного восприятия, b Гибкий растягиваемый оптический волновод на основе нанорешетки
Эксперименты по тактильному восприятию
При тактильном восприятии давление и деформация - это две физические величины, которые часто используются в тактильных сенсорах роботов при взаимодействии с внешней средой. Точное восприятие давления и деформации в режиме реального времени может позволить роботам точно определять степень механической деформации при взаимодействии с внешними объектами, чтобы облегчить последующую оптимальную работу с обратной связью.
Метод тестирования гибкого и растягиваемого оптического волновода заключается в следующем:(1) Стабильный световой пучок используется для падения на волноводный передающий слой гибкого и растягиваемого оптического волновода через решетку связи под фиксированным углом. На другом конце оптического волновода фотодетектор используется для сбора выходного света от выходного решетчатого элемента связи. (2) Когда к гибкому и растяжимому оптическому волноводу приложена внешняя сила, структура оптического волновода изменится, что приведет к ослаблению интенсивности выходного света. Анализируя ослабление интенсивности света, можно точно измерить внешнюю силу. (3) Когда к гибкому и растяжимому оптическому волноводу прилагается внешняя деформация, деформация также может быть точно измерена в соответствии с изменением интенсивности выходного света. Было проведено испытание давлением гибкого растягиваемого оптического волновода. В этом эксперименте гибкий и растягиваемый оптический волновод фиксируется двумя скользящими головками штангенциркуля Вернье, а лазерные источники с длиной волны 632,8 нм настраиваются для подключения к входному отверстию решетки под оптимальным углом. Положение оптимального угла связано с максимальной мощностью, получаемой измерителем мощности на выходном конце решетки. В средней части гибкого и растягиваемого оптического волновода используется измеритель давления для постепенного давления на него, и записываются соответствующие данные о значении давления и интенсивности света.
Результаты экспериментов показаны на рис. 7а. Согласно фигуре, интенсивность выходного света оптического волновода уменьшается по мере увеличения приложенного давления, и существует линейная корреляция между изменением давления и интенсивностью выходного связанного света. Диапазон измерения давления гибкого растягиваемого оптического волновода составляет от 0 до 25 × 10 –3 . Н.
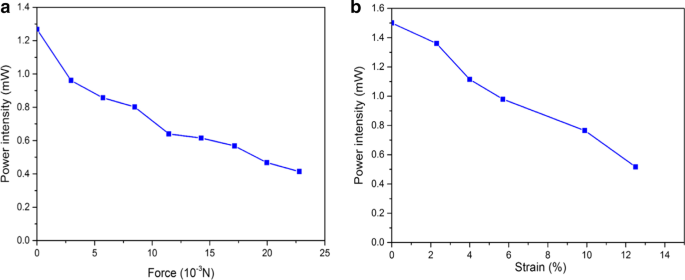
Эксперименты по зондированию с гибким и растягивающимся оптическим волноводом: a график зависимости давления от потери интенсивности света, b график зависимости деформации от потери интенсивности света
Эксперимент по измерению деформации гибкого и растягиваемого оптического волновода проводится с помощью механизма растяжения со шкалой. Во-первых, гибкий и растягиваемый волновод предварительно растягивается, чтобы избежать изгиба под действием силы тяжести, так что он находится в горизонтальном состоянии, а его начальная длина L 0 регистрируется штангенциркулем. Затем гибкий и растягиваемый оптический волновод растягивается зажимным механизмом на обоих концах штангенциркуля, и длина после растяжения записывается как L, тогда соответствующая деформация S может быть рассчитана как:
$$ {\ text {S}} =\ frac {{L - L_ {0}}} {{L_ {0}}} $$ (4)Результаты экспериментов по измерению деформации на основе гибкого растягиваемого оптического волновода показаны на рисунке. Согласно рисунку, с увеличением приложенной деформации выходная оптическая интенсивность гибкого и растягиваемого оптического волновода постепенно уменьшалась. Более того, оптическая мощность уменьшалась по мере увеличения приложенной деформации, и между ними существует линейная корреляция. Между тем, диапазон измерения деформации гибкого и растягиваемого оптического волновода составляет от 0 до 12,5% с точностью до 0,1%, как показано на рис. 7b.
Сенсорную систему можно разделить на две части:гибкий растягиваемый оптический волновод и детектор света (которым является цифровой измеритель мощности PM100D). Поскольку задержка света, передаваемого в оптическом датчике на основе PDMS, действительно мала и ею можно пренебречь, скорость отклика и восстановления в основном зависит от светового датчика. А частота срабатывания измерителя мощности в нашей системе обнаружения составляет 25 Гц. Таким образом, время отклика гибкого растягиваемого оптического волноводного датчика составляет 40 мс. Стабильность цикла гибкого и растягиваемого оптического датчика исследуется путем нагружения и разгрузки приложенной деформации и давления. В случае определенной приложенной нагрузки мы подсчитываем количество растяжек в повторных экспериментах. И результат показывает, что его можно растянуть более 3000 раз со стабильностью. Кроме того, если материал PDMS смешать с PAAm (полиакриламидом), материал выдержит более 30 000 циклов нагрузки [26].
В настоящее время существуют некоторые проблемы при изготовлении гибких и растягиваемых оптических устройств. Основная причина в том, что количество прозрачных и гибких оптических материалов, которые можно использовать для растяжения, действительно ограничено. Другая причина заключается в том, что необходимо разработать новые производственные технологии, которые можно использовать для быстрого создания прототипов и изготовления микро- и наноструктур на основе гибких оптических материалов. Гибкий и растягиваемый оптический волновод представляет собой оригинальную конструкцию, потери в волноводе будут увеличены при использовании PDMS в качестве основного слоя волновода. Недавно были предложены некоторые гибкие оптические материалы [21, 27, 28, 29, 30]. Ван и др. изготовили гибкую фотонную бумагу с нанокристаллами целлюлозы и полиуретановым латексом на водной основе [31]. В будущем структура оптического волновода может быть улучшена с помощью соответствующих гибких оптических материалов.
Заключение
Таким образом, гибкие и растягиваемые волноводы подходят для приложений в области тактильного зондирования, здравоохранения и гибкой электроники. Гибкий и растягиваемый оптический волновод изготавливается на гибких оптических материалах с шаблоном кремниевой решетки, а структура нанорешетки может быть перенесена на гибкий оптический материал путем формования нанорепликации. Изготовленный гибкий и растягиваемый оптический волновод имеет преимущества быстрого прототипирования, низкой стоимости и простоты изготовления. Была изучена технология изготовления гибкого и растягиваемого оптического волновода, и была разработана оптимальная технология изготовления путем сочетания процесса подготовки жертвенного слоя, подготовки шаблона кремниевой решетки, гидрофобной обработки и технологии подготовки гибкого материала. Гибкий и растягиваемый оптический волновод имел диапазон обнаружения деформации от 0 до 12,5%, а диапазон обнаружения внешней силы - от 0 до 23 × 10 –3 N. Гибкие и растягиваемые чувствительные устройства на основе оптических волноводов обладают характеристиками гибкости, растяжимости и легкости прилегания к изогнутой поверхности по сравнению с обычными жесткими оптическими волноводами. Гибким оптическим материалом, используемым в этом устройстве, является PDMS, который можно использовать для улучшения свойств растяжения гибкого и растягиваемого оптического волновода до более чем 50%. Устройство может полностью раскрыть растяжимость и гибкость гибкого растягиваемого оптического волновода и точно измерить изменение выходной интенсивности оптической мощности оптического волновода, вызванное изменениями внешних физических величин (давления, деформации и т. Д.). / P>
Доступность данных и материалов
Все данные полностью доступны без ограничений.
Сокращения
- IPA:
-
Изопропиловый спирт
- DI вода:
-
Деионизированная вода
- FDTD:
-
Временная область с конечной разницей
- PDMS:
-
Полидиметилсилоксан
Наноматериалы
- Future Electronics:платформа быстрой разработки для тепловидения и ИК-зондирования
- ADI:импеданс и потенциостат AFE для биологического и химического зондирования
- Интеллектуальная защита цепей и проектирование датчиков для замков и контроля доступа в умном доме
- Звуковые, визуальные и тактильные осмотры для персонала профилактического технического обслуживания
- Нановолокна и нити для улучшенной доставки лекарств
- Демонстрация гибкого биосенсора на основе графена для чувствительного и быстрого обнаружения клеток рака яи…
- Магические математические отношения для нанокластеров - исправления и приложение
- Компания ABB и Ericsson объединяются для ускорения беспроводной автоматизации для гибких производств
- Мягкие сенсорные самовосстанавливающиеся материалы для роботизированных кистей и предплечий
- Технология психосенсорной электронной кожи для искусственного интеллекта и развития гуманоидов