


Регулятор напряжения с усилением переходных процессов со стабильностью и повышением отклонения источника питания
Аннотация
В этой статье предлагается высокостабильный стабилизатор напряжения (VR), который объединяет усиление переходных процессов и защиту от перегрузки по току (OCP). Принимая во внимание характеристики и преимущества низковольтных устройств по площади, большая часть управляющих элементов предлагаемых ВР питается от регулируемого выходного напряжения, которое образует метод автономного питания (SPT) с повышением отказа от источника питания (PSR). Кроме того, стабильность и переходная характеристика улучшены методом динамической нагрузки (DLT). Встроенный контур обратной связи по перегрузке по току также используется для защиты представленного VR от повреждений в ситуациях перегрузки. Предлагаемый VR реализован по стандартной 350-нм технологии BCD, результаты которой показывают, что VR может стабильно работать с входным напряжением 5,5–30 В, диапазоном нагрузки 0–30 мА и выходным конденсатором 0,1–3,3 мкФ. Регулировка линии 2,98 мкВ / В и регулировка нагрузки 0,233 мВ / мА достигаются при ограничении тока 40 мА. PSR лучше, чем - 64 дБ до 10 МГц с выходным конденсатором 0,1 мкФ.
Введение
В современных конструкциях систем на кристалле (SoC) нанометрового масштаба для разных субблоков обычно требуются разные шины питания для выполнения определенных функций. Кроме того, всей системе SoC может потребоваться работать в широком диапазоне входных напряжений и при этом обеспечивать высокую производительность, не зависящую от изменения условий питания [1]. Таким образом, стабилизатор напряжения (VR) с широким диапазоном входного напряжения, реализованный в нанометровом масштабе, может быть одним из наиболее подходящих кандидатов для такого рода приложений. По сравнению со своими переключающими аналогами, такими как импульсный стабилизатор и накачка заряда, линейный VR обладает преимуществом высокой точности, низкого выходного шума и компактных размеров. Большинство линейных VR выполняют свою функцию регулирования напряжения с одним источником напряжения, но лишь некоторые из них могут обеспечить сочетание широкого диапазона питания, низкого уровня шума, быстрых переходных процессов, высокой нагрузочной способности и дополнительных функций защиты [2,3,4] .
Для реализации широкого диапазона источников питания необходимо использование транзисторов, выдерживающих высокое напряжение. Однако такие транзисторы обычно занимают большую площадь и имеют худшие характеристики по сравнению со стандартными транзисторами. Двумя существующими решениями по сокращению использования высоковольтных транзисторов являются метод предварительного регулятора [5, 6] и метод пакетных низковольтных транзисторов [7, 8]. Первый использует дополнительный предварительный регулятор для обеспечения внутреннего напряжения питания для основного регулятора. Последний реализует хорошо спроектированные пакетные низковольтные транзисторы для поддержания выходных напряжений транзисторов в рамках технологических ограничений [7]. Однако эти методы ограничивают запас по напряжению. В этой статье используется метод самообеспечения (SPT) для достижения широкого диапазона электропитания, что означает, что большинство основных модулей в контуре регулирования питаются регулируемым выходным напряжением предлагаемого VR [9]. Без какой-либо дополнительной схемы производительность VR можно улучшить с помощью SPT, а также уменьшить количество высоковольтных устройств.
При использовании SPT на первый каскад усилителя ошибки (EA) подается регулируемое выходное напряжение предлагаемого VR. При тщательном проектировании второй ступени ЭП высокочастотный шум входного напряжения мало влияет на выходное напряжение ЭП. Кроме того, в этой статье принята архитектура силовых транзисторов N-типа. Таким образом, предлагаемый регулятор имеет высокий коэффициент подавления мощности (PSR) и хорошие шумовые характеристики [10,11,12,13,14,15].
Быстрый переходный отклик также является важным показателем для измерения производительности VR [16,17,18,19,20], что обычно достигается за счет добавления дополнительного цикла ускорения [21]. В этой статье улучшение переходных процессов реализовано с помощью метода динамической нагрузки (DLT). Во время процедуры переходного отклика DLT вводит дополнительный ток, изменяющийся соответственно с условиями нагрузки, чтобы действовать как динамическая нагрузка, с помощью которой могут быть подавлены выбросы и выбросы регулируемого выходного напряжения [9].
С помощью DLT стабильность контура в широком диапазоне нагрузок повышается, поскольку дополнительный ток нагрузки может уменьшить изменение недоминантного положения полюсов. Чтобы сделать контур стабильным, также используется компенсация Миллера с обнуляющим резистором для создания низкочастотного полюса и дополнительного нуля для компенсации выходного полюса. Кроме того, серия резисторов с выходным конденсатором вводит еще один ноль для компенсации полюса, генерируемого паразитной емкостью затвора силового транзистора [6, 9, 22, 23].
Наконец, встроенная петля ограничения тока предназначена для предотвращения повреждений от перегрузки по току и повышения надежности предлагаемого VR [9, 24,25,26,27].
Эта статья структурирована следующим образом. Принцип и механизм предлагаемого VR проиллюстрированы в разделе «Метод», включая схему максимальной токовой защиты (OCP), DLT и схему повышения переходных процессов, метод повышения стабильности и анализ PSR. Результаты производительности и сравнения с другой связанной опубликованной литературой показаны в разделе «Результаты и обсуждение». Раздел «Заключение» подводит итог предлагаемой ВР.
Метод
Подробная схема предлагаемого VR показана на рис. 1. Стандартные низковольтные МОП-транзисторы, высоковольтные транзисторы, биполярные транзисторы, обедненные LDMOS-транзисторы N-типа (MOS-транзисторы с латеральной диффузией) и диоды обозначены M n , ВН n , Q n , DN n , и D n соответственно на рисунке, где n - порядковый номер соответствующего устройства.
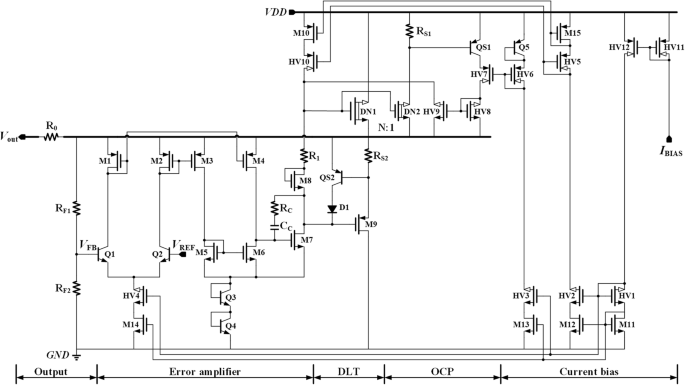
Подробная схема предлагаемого ВР
Предлагаемый VR в основном включает в себя пять подмодулей:смещение тока, OCP, DLT, EA и выходной каскад. Цепь смещения тока обеспечивает ток смещения для всей системы регулятора [12, 14]. Опорное напряжение можно генерировать разными способами [1], и подробная схема здесь не показана. Встроенный контур ограничения тока функционирует как цепь OCP для ограничения тока нагрузки до заданного значения. Схема улучшения переходных процессов, которая реализована в DLT, достигает перерегулирования и подавления отрицательных выбросов за счет адаптивного изменения тока нагрузки во время переходной процедуры. Контур регулирования с отрицательной обратной связью формируется EA и выходным силовым каскадом для регулировки выходного напряжения. Предполагая, что выходное напряжение V ВЫХОД и, следовательно, напряжение обратной связи V FB было ниже желаемого значения, напряжение на затворе силового транзистора DN1 будет увеличиваться с помощью контура регулирования для увеличения выходного напряжения, и наоборот. Наконец, выходное напряжение может стабилизироваться на
$$ {V} _ {\ mathrm {OUT}} \ приблизительно {V} _1 ={V} _ {\ mathrm {REF}} \ left ({R} _ {\ mathrm {f} 1} + {R} _ {\ mathrm {f} 2} \ right) / {R} _ {\ mathrm {f} 2} $$ (1)На рис. 1 можно заметить, что выходное напряжение предлагаемого VR также питает первый каскад усиления EA, который называется SPT. С помощью этого метода мультиплексирования мощности большинство устройств в контуре регулирования могут быть реализованы с помощью низковольтных устройств. По сравнению со своими высоковольтными аналогами низковольтные устройства имеют более высокие характеристики, более низкую стоимость и меньшую площадь, что значительно упрощает достижение хорошей регулирующей способностью предлагаемого контура регулирования. Что касается второй ступени EA, Q3 и Q4 добавлены для подъема шины заземления, которая используется для ограничения напряжения сток-исток M7, V DS_M7 . Другими словами, Q3 и Q4 могут предотвратить M7 от высокого напряжения.
Для простоты упрощенная схема используется для иллюстрации инновационных идей в последующем анализе.
Предлагаемая схема OCP
На рисунке 2 показана предлагаемая схема OCP. Предлагаемый контур ограничения тока может автоматически изменять режим работы в соответствии с различными условиями нагрузки. Максимальный ток предлагаемого VR может быть ограничен за счет уменьшения напряжения на затворе силового транзистора при возникновении перегрузки.
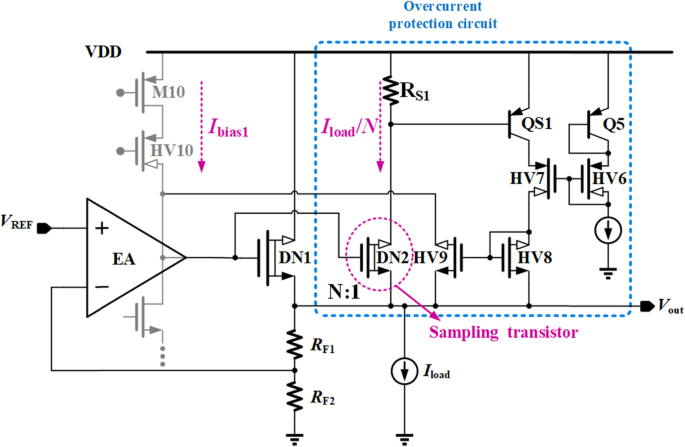
Принцип предлагаемого OCP
Механизм предлагаемого ОКП следующий. Пробоотборный транзистор DN2 пропорционально определяет ток, протекающий через DN1, который приблизительно равен току нагрузки I . Загрузить , что делает падение напряжения на R S1 , V RS1 , отражают текущий уровень нагрузки. Один раз V RS1 достигает напряжения включения QS1, HV8 и HV9 образует токовое зеркало для обхода тока от второй ступени EA. Затем можно уменьшить напряжение затвора DN1, чтобы ограничить ток нагрузки до заданного значения, которое можно выразить как
$$ {I} _ {\ mathrm {Load}} \ le N \ times \ left ({V} _ {EB \ left (\ mathrm {QS} 1 \ right)} / {R} _ {S1} \ right ) $$ (2)где N - отношение размерного фактора DN1 к DN2. Назначение Q5 и HV6 - обеспечить правильное напряжение смещения для HV7 и, таким образом, защитить QS1 от состояния перенапряжения.
В предлагаемой OCP встроена петля отрицательной обратной связи. Коэффициент усиления контура T и доминирующий полюс p доминирующий этого контура ограничения тока может быть задано как,
$$ T ={g} _ {m \ _ \ mathrm {DN} 2} {R} _ {S1} {g} _ {m \ _ \ mathrm {QS} 1} {R} _ {\ mathrm {gate } \ _ \ mathrm {OC}} $$ (3) $$ {p} _ {\ mathrm {dominant}} =1 / \ left ({R} _ {\ mathrm {gate} \ _ \ mathrm {OC} } {C} _ {\ mathrm {gate}} \ right) $$ (4)где g m_DN2 и g m_QS1 - крутизна DN2 и QS1 соответственно. R gate_OC ≈ ( г m_HV10 г o_HV10 г o_M10 ) || г o_M7 || г o_HV9 и C ворота ≈ C gs_DN1 - эквивалентное выходное сопротивление и емкость в затворе силового транзистора DN1 при возникновении перегрузки по току соответственно. Когда предлагаемый VR обычно работает без перегрузки по току, HV9 находится в области отсечки, и, следовательно, эквивалентное выходное сопротивление в узле затвора DN1 называется R ворота может быть выражено как [( g m_HV10 г o_HV10 г o_M10 ) || г o_M7 ].
Предлагаемая схема DLT и улучшения переходных процессов
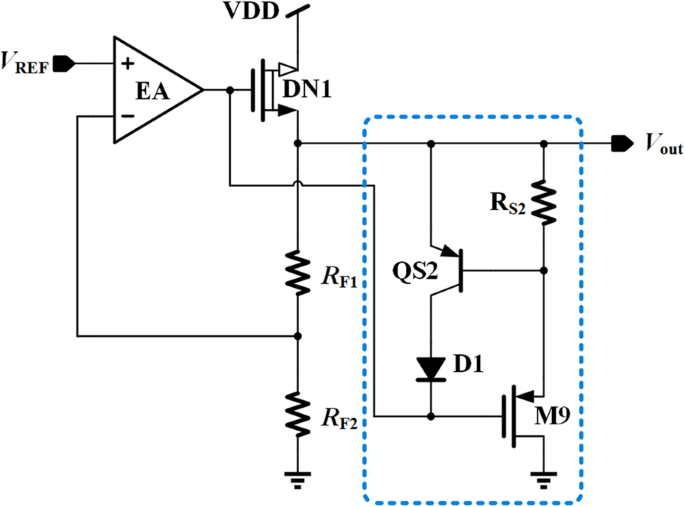
На рисунке 3 показана схема улучшения переходных процессов с использованием DLT. Поскольку ток нагрузки пропорционален Vgs_DN1 и обратно пропорционален Vsg_M9, ток, протекающий через M9, больше в условиях малой нагрузки и близок к нулю в условиях большой нагрузки. Следовательно, по мере увеличения тока нагрузки в общую выходную нагрузку может быть внесен уменьшенный ток. С помощью этого метода эту схему можно уравнять с динамической нагрузкой, что может быть полезно как для улучшения переходных процессов, так и для повышения стабильности контура регулирования.
Предлагаемая схема улучшения переходных процессов
Подробный принцип работы улучшения переходных процессов заключается в следующем. Если ток нагрузки внезапно уменьшается, ток, протекающий через силовой транзистор DN1, не изменится сразу из-за ограниченной способности регулирования контура и скорости нарастания. Этот ток, показанный на рис. 4a желтым путем, вызовет выброс выходного напряжения и, таким образом, увеличит падение напряжения на R S2 и M9. Затем дополнительный ток, протекающий через R S2 и M9, показанный на рис. 4a как синий путь, генерируется на регулируемом выходе для компенсации нежелательного тока желтого пути. Таким образом, скачки выходного напряжения эффективно уменьшаются.
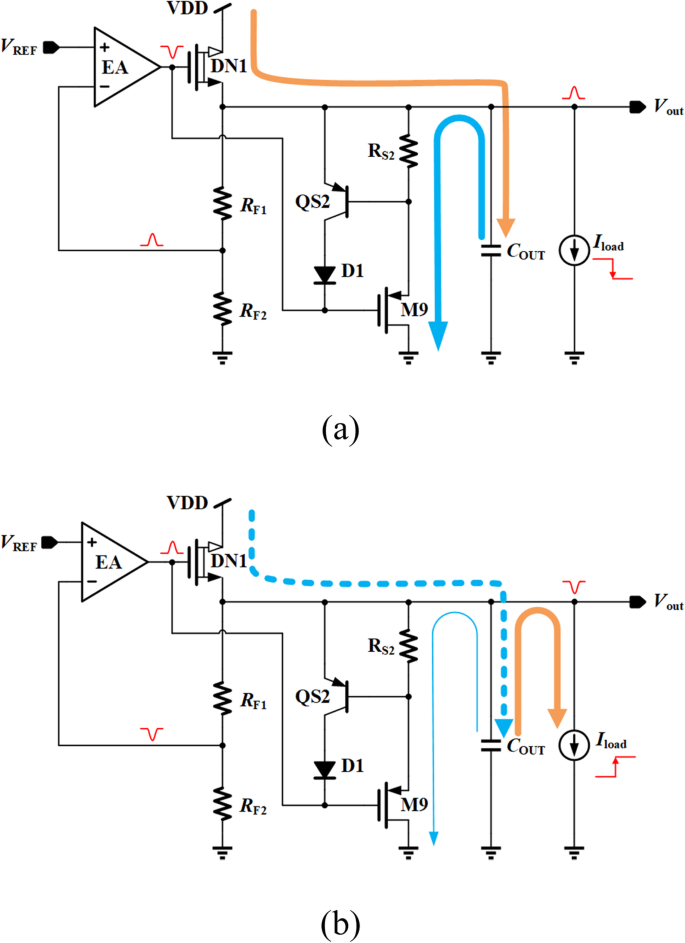
Переходный отклик предлагаемой VR. а изменение тока тяжелой нагрузки на легкую. б изменение тока от легкой до большой нагрузки
На рис. 4b показан случай изменения тока нагрузки с легкой на большую, когда на регулируемом выходе происходит выброс, а затем ток, протекающий через R S2 и M9 уменьшается. Это может быть эквивалентно обеспечению пониженной токовой нагрузки, поэтому чистый ток, протекающий через силовой транзистор DN1, увеличивается, и может быть достигнуто подавление провалов напряжения.
Для защиты M9 от перегрузки по току добавлены QS2 и D1. Когда напряжение на R S2 больше, чем напряжение включения QS2, дополнительный ток будет течь в QS2 и D1. Максимальный ток в M9 установлен на
$$ {I} _ {\ mathrm {M} 9 \ _ \ max} \ le \ left ({V} _ {BE \ _ QS2} / {R} _ {S2} \ right) $$ (5)Назначение D1 - предотвратить падение QS2 в область обратного усиления и прохождение в ней обратного тока, что является ненормальным состоянием функции ограничения тока M9.
Повышение стабильности предлагаемой виртуальной реальности
Как показано на рис. 5, имеется три полюса ω p1 , ω p2 , и ω p3 , и два нуля ω z1 и ω z2 в контуре управления, а коэффициент усиления предлагаемого VR составляет
$$ {A} _ {\ mathrm {Vloop}} ={A} _O \ beta $$ (6)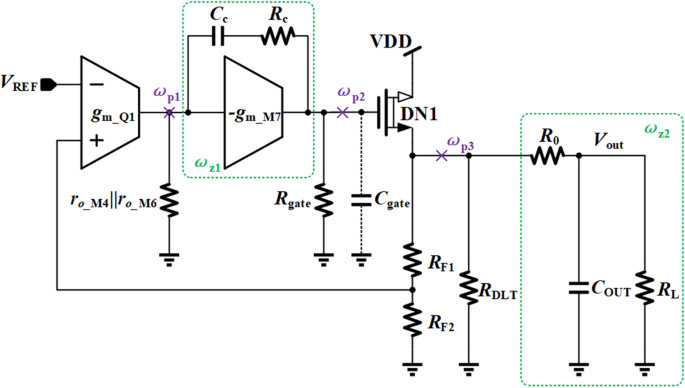
Распределение полюсов и нулей предлагаемой ВР
где A O - коэффициент усиления разомкнутого контура VR, а β коэффициент обратной связи,
$$ {A} _O ={A} _ {\ mathrm {CD} 0} {A} _ {E0} \ frac {\ left (1 + s / {\ omega} _ {Z1} \ right) \ left ( 1 + s / {\ omega} _ {Z2} \ right)} {\ left (1 + s / {\ omega} _ {P1} \ right) \ left (1 + s / {\ omega} _ {P3} \ right) \ left (1 + s / {\ omega} _ {P2} \ right)} $$ (7) $$ \ beta =\ frac {R _ {\ mathrm {F} 2}} {R _ {\ mathrm {F} 1} + {R} _ {\ mathrm {F} 2}} $$ (8)где A CD0 ≈ 1 - низкочастотный коэффициент усиления силового каскада, который работает как повторитель напряжения, а A E0 - низкочастотное усиление советника,
$$ {A} _ {E0} ={g} _ {m \ _Q1} \ left ({r} _ {o \ _M4} \ Big \ Vert {r} _ {o \ _M6} \ right) {g} _ {m \ _M7} {R} _ {\ mathrm {gate}} $$ (9)Учитывая эффект Миллера и паразитную емкость в узле затвора DN1, полюса и нули записываются как [13]
$$ {\ omega} _ {p1} =1 / \ left [{g} _ {m \ _M7} {R} _ {\ mathrm {gate}} {C} _c \ times \ left ({r} _ { o \ _M4} \ Big \ Vert {r} _ {o \ _M6} \ right) \ right] $$ (10) $$ {\ omega} _ {p2} ={g} _ {m \ _M7} / { C} _ {\ mathrm {gate}} $$ (11) $$ {\ omega} _ {p3} =1 / \ left \ {\ left [{R} _L \ Big \ Vert \ left ({g} _ {m \ _ \ mathrm {DN} 1} ^ {- 1} \ Big \ Vert {R} _ {\ mathrm {DLT}} + {R} _0 \ right) \ right] {C} _ {\ mathrm { OUT}} \ right \} $$ (12) $$ {\ omega} _ {z1} =1 / \ left [{C} _c \ left ({R} _c-1 / {g} _ {m \ _M7 } \ right) \ right] $$ (13) $$ {\ omega} _ {z2} =1 / \ left [\ left ({R} _0 \ Big \ Vert {R} _L \ right) {C} _ {\ mathrm {OUT}} \ right] $$ (14)где R DLT - эквивалентное сопротивление переходной схемы усиления; C ВЫХОД выходной конденсатор предлагаемого ВР.
Поскольку компенсационный конденсатор C C увеличивается на ( g m_M7 R ворота ) из-за эффекта Миллера в узле p1 полюс ω p1 является доминирующим полюсом. Второй полюс должен быть ω p3 , потому что C ВЫХОД обычно находится в пределах нескольких микрофарад. Хотя паразитный конденсатор C ворота относительно велика, она все же меньше эквивалентной емкости в узле p1 и выходного конденсатора. Кроме того, сопротивление в узле p2 составляет всего 1 / g . m_M7 . Следовательно, полюс ω p2 находится на высокой частоте. Нулевой ω z1 отменяет полюс средних частот ω p3 . Резистор R 0 генерирует нулевой ω z2 для компенсации внутреннего паразитного полюса ω p2 . Стабильность предлагаемого ВР может быть улучшена резистором R . 0 увеличивается. Однако резистор R 0 увеличит погрешность выходного напряжения из-за падения напряжения, вызванного током нагрузки. Следовательно, резистор R 0 должен быть установлен в разумное значение, чтобы найти хороший компромисс между точностью выходного напряжения и стабильностью контура.
В обычном регуляторе напряжения без DLT полюс на выходном узле будет иметь другую частоту из-за изменения тока нагрузки, индуцированного изменением крутизны силового транзистора. По мере увеличения тока нагрузки крутизна силового транзистора g м _DN1 увеличится, и, таким образом, выходной полюс будет двигаться в сторону высокой частоты, в то время как другие нули и полюса останутся в том же положении, как показано на рис. 6a. Это может затруднить частотную компенсацию системы и замедлить переходные процессы в условиях небольшой нагрузки. А если серьезно, то система может работать нестабильно.
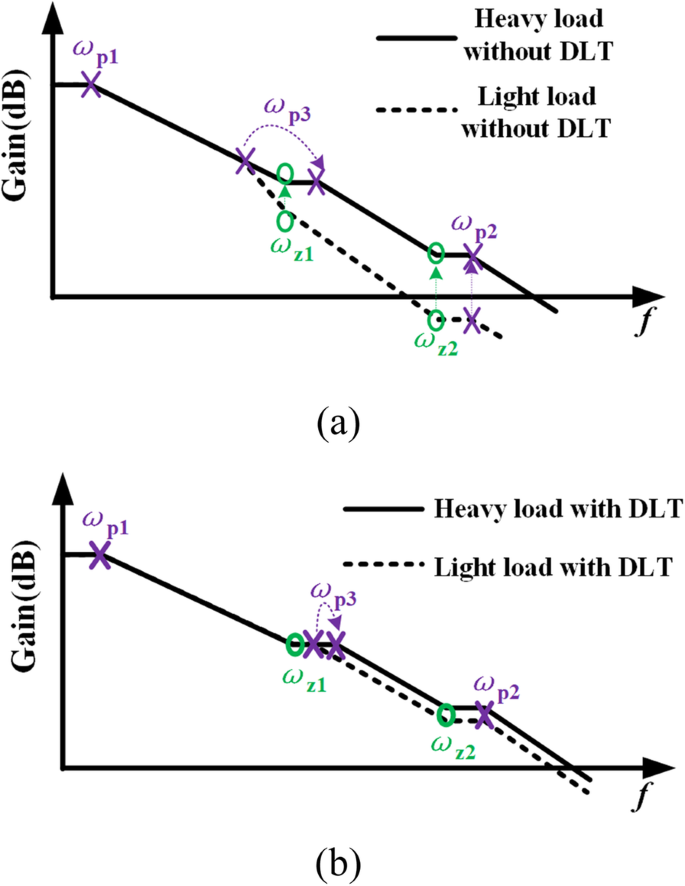
Амплитудно-частотная характеристика регулятора напряжения. а Стабилизатор напряжения без техники динамической нагрузки. б Предлагаемый регулятор напряжения с динамической нагрузкой
С помощью предложенного DLT представленный VR имеет лучшую устойчивость при различных нагрузках. Как было проанализировано ранее, ток в цепи динамической нагрузки уменьшается по мере увеличения тока нагрузки в установившемся режиме и наоборот. Поскольку этот ток обеспечивается DN1, он может подавлять изменения крутизны DN1 в более широком диапазоне тока нагрузки, что полезно для стабильности системы и постоянства полосы пропускания в более широком диапазоне нагрузки за счет использования предлагаемого DLT. Частотная характеристика предлагаемого VR представлена на рис. 6b, что может гарантировать стабильность при быстром переходном процессе.
Выходной конденсатор устанавливает положение нуля ω z2 . Размещая нулевой полюс разумно, система будет иметь лучшую стабильность при различных C ВЫХОД .
Анализ PSR предлагаемой виртуальной реальности
PSR является одним из критических параметров для измерения характеристик регуляторов напряжения, и он относится к способности подавления высокочастотных пульсаций и шума, возникающих из-за напряжения питания. В этом разделе принят метод анализа PSR, предложенный Gupta 12, основная идея которого состоит в том, чтобы упростить всю систему регулятора в виде модели делителя напряжения. Как показано на рис. 7, есть два пути шума от V дд в V вне :путь 1 напрямую передает шум со стока силового транзистора DN1 на V вне ; путь 2 - от второго каскада ЭА до затвора силового транзистора DN1. Эффект пути 2 можно выразить как
$$ {A} _ {\ mathrm {path} 2} \ приблизительно \ frac {r_ {o \ _M7}} {g_ {m \ _ \ mathrm {HV} 10} {r} _ {o \ _ \ mathrm { HV} 10} {r} _ {o \ _M10}} $$ (15)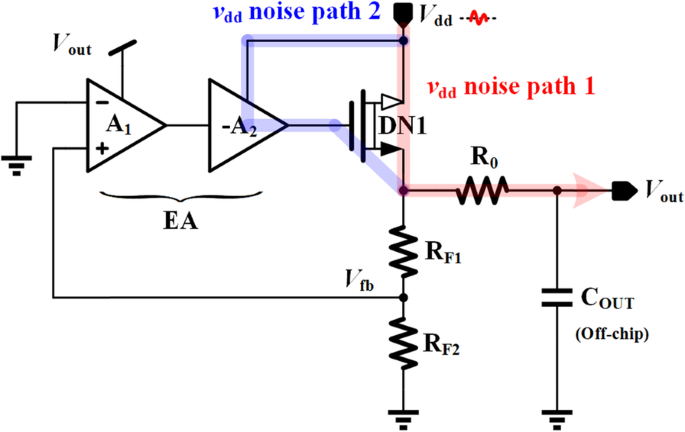
PSR анализ предлагаемой VR
Как показано в (15), A путь2 является довольно малогабаритным с помощью предложенной конструкции SPT и каскодного токового зеркала. Это делает влияние пути 1 доминирующим в анализе PSR.
Упрощенная модель PSR предлагаемой VR показана на рис. 8, где r o_DN1 - выходное сопротивление силового транзистора DN1, учитывающее шумовой тракт 1, управляемый источник тока исходит из шумового тракта 2, Z B состоит из R F1 , R F2 , R 0 , и C ВЫХОД действует как фильтр на высоких частотах, и Z SH_FB - эквивалентный импеданс, включая функцию контура отрицательной обратной связи. Я SH_FB может быть выдан
$$ {Z} _ {SH \ _ FB} =\ frac {1} {g_ {m \ _ DN1} \ left (1+ \ beta {A} _E \ right)} $$ (16) <картинка>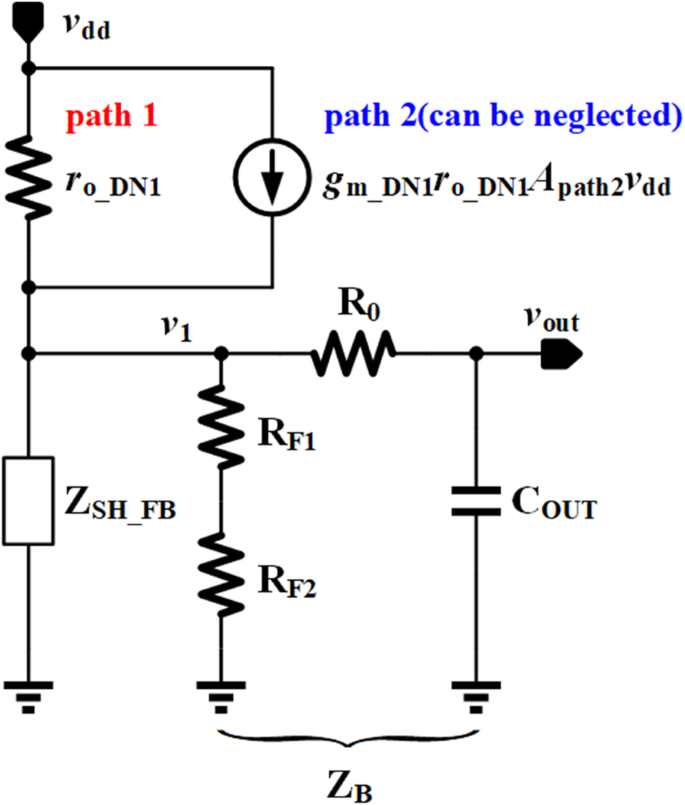
Упрощенная модель PSR
где g m_DN1 крутизна силового транзистора DN1. Следовательно, передаточная функция PSR может быть выражена как
$$ \ mathrm {PSR} =\ frac {V _ {\ mathrm {out}}} {V _ {\ mathrm {dd}}} =\ frac {\ left (1+ {g} _ {m \ _ \ mathrm { DN} 1} {r} _ {o \ _ \ mathrm {DN} 1} {A} _ {\ mathrm {path} 2} \ right) \ left ({Z} _B \ Big \ Vert {Z} _ { \ mathrm {SH} \ _ \ mathrm {FB}} \ right)} {r_ {o \ _ \ mathrm {DN} 1} + {Z} _B \ Big \ Vert {Z} _ {\ mathrm {SH} \ _ \ mathrm {FB}}} $$ (17)Умышленно установив собственное усиление HV10 намного больше, чем у силового транзистора DN1, g m_DN1 г o_DN1 А путь2 <<1 может быть достигнуто, и, таким образом, управляемым источником тока можно пренебречь. Выражение PSR можно упростить следующим образом:
$$ \ mathrm {PSR} \ приблизительно \ frac {Z_B \ Big \ Vert {Z} _ {\ mathrm {SH} \ _ \ mathrm {FB}}} {r_ {o \ _ \ mathrm {DN} 1} + {Z} _B \ Big \ Vert {Z} _ {\ mathrm {SH} \ _ \ mathrm {FB}}} $$ (18)Поскольку Z B и Z SH_FB будет меняться при изменении частоты, необходимо проанализировать частотную характеристику PSR.
Низкая частота
На низкой частоте усиление EA очень велико, и C ВЫХОД можно рассматривать как разомкнутую цепь. Таким образом, Z B >> Z SH_FB и PSR можно записать как
$$ {\ mathrm {PSR}} _ {\ mathrm {LF}} \ приблизительно \ frac {1} {g_ {m \ _ \ mathrm {DN} 1} {r} _ {o \ _ \ mathrm {DN} 1} \ left (1+ \ beta {A} _ {E0} \ right)} $$ (19)Средняя частота
Импеданс Z SH_FB увеличится, потому что усиление контура уменьшается на средней частоте. На этом этапе Z SH_FB все еще невелик, и на PSR в основном влияет усиление контура. Что касается (7), PSR можно выразить как
$$ {\ mathrm {PSR}} _ {\ mathrm {MF}} \ приблизительно \ frac {1} {g_ {m \ _ \ mathrm {DN} 1} {r} _ {o \ _ \ mathrm {DN} 1} \ left (1+ \ beta {A} _ {E0} \ right)} \ frac {1 + s / {\ omega} _p} {1 + s / \ left [{\ omega} _p \ left (1 + \ beta {A} _ {E0} \ right) \ right]} $$ (20)Как показано в (20), PSR ухудшается, а шум выходного напряжения становится более серьезным при увеличении частоты в пределах частоты с единичным усилением.
Высокая частота
Из-за увеличения частоты Z SH_FB становится большим и в конечном итоге приближается к 1 / g m_DN1 . Импеданс C ВЫХОД становится меньше, но по-прежнему намного больше, чем R 0 . Итак, R 0 может быть опущен, как и раньше. Высокочастотный PSR зависит от деления напряжения между r o_DN1 и 1 / г m_DN1 параллельно с C ВЫХОД , который может быть представлен как
$$ {\ mathrm {PSR}} _ {\ mathrm {HF}} \ приблизительно \ frac {1} {g_ {m \ _ \ mathrm {DN} 1} {r} _ {o \ _ \ mathrm {DN} 1}} \ frac {1} {1 + s {C} _ {\ mathrm {OUT}} / {g} _ {m \ _ \ mathrm {DN} 1}} $$ (21)На высокой частоте шум на выходе напряжения может быть значительно подавлен из-за эффекта C ВЫХОД .
Как было проанализировано ранее, хорошая антишумовая способность во всем частотном диапазоне предлагаемого VR гарантируется тремя аспектами. Во-первых, принимается высокое усиление контура; Во-вторых, SPT снижает влияние шума источника питания на затвор силового транзистора; В-третьих, выходной конденсатор С ВЫХОД может улучшить PSR на высоких частотах с помощью свойства фильтрации.
Результаты и обсуждение
Предлагаемый VR реализован по стандартной технологии BCD 0,35 мкм. Фотография микросхемы изготовленного регулятора представлена на рис. 9, активная площадь сердечника которого составляет 290 мкм × 900 мкм.
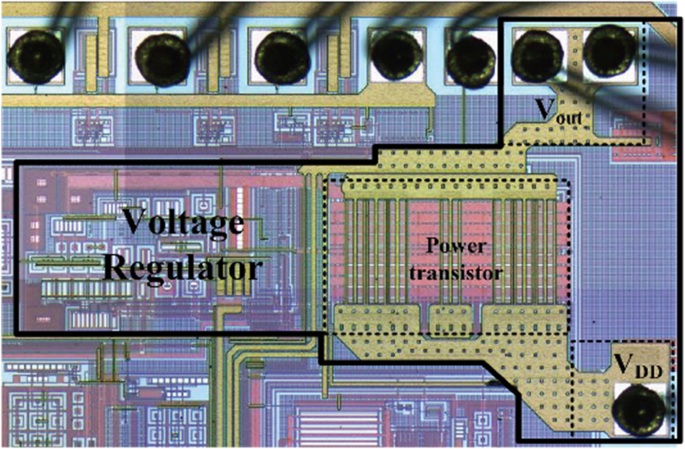
Фото микросхемы предлагаемой ВР
Регулируемое выходное напряжение предлагаемого ВР составляет 5 В при напряжении питания от 5,5 до 30 В. Выходной конденсатор представляет собой недорогой керамический конденсатор. Емкость выходного конденсатора может быть установлена от 100 нФ до 3,3 мкФ.
На рисунке 10 показана частотная характеристика предлагаемого VR при различных условиях нагрузки с выходным конденсатором 100 нФ и 3,3 мкФ. Предлагаемый LDO может поддерживать стабильность в широком диапазоне значений выходного конденсатора, а форма сигнала частотной характеристики контура имеет очень небольшую разницу между током нагрузки 0 и 30 мА, что выгодно от предложенного DLT, проанализированного ранее.
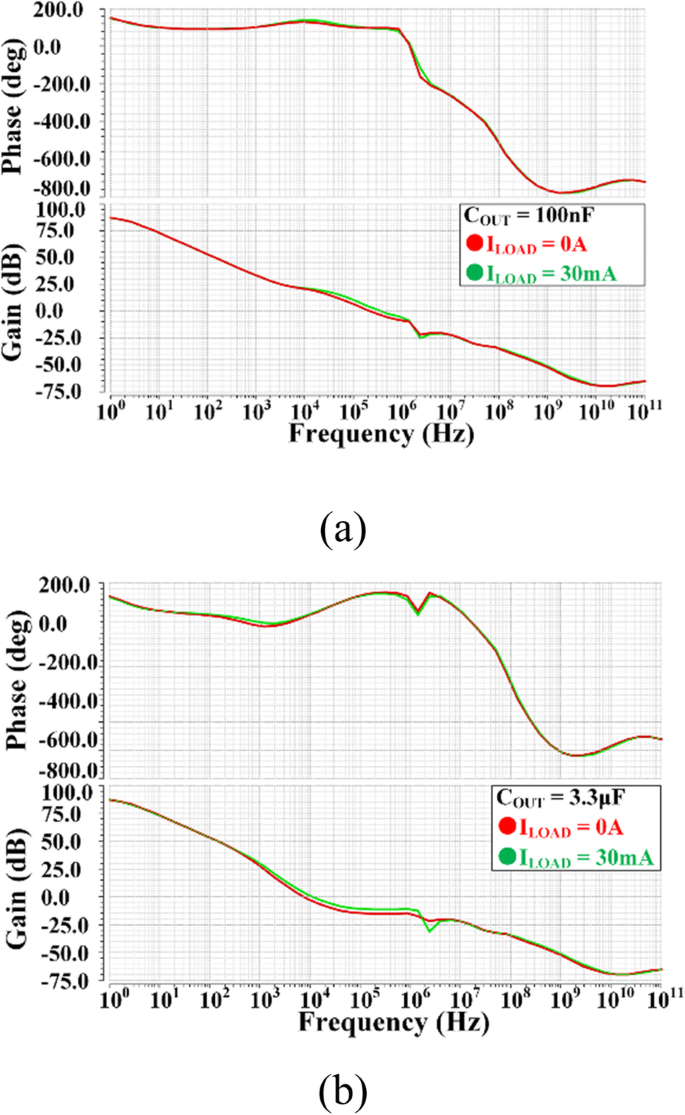
Амплитудно-частотные характеристики петли предложенного VR при разном значении I Загрузить и C ВЫХОД условия. а C OUT =100 нФ, b C OUT =3,3 훍 F. Красно-зеленая линия представляет I Загрузить 0 А и 30 мА соответственно
Результат проверки PSR с выходным конденсатором 0,1 мкФ показан на рисунке 11, где достигается значение - 110 дБ на низкой частоте и лучше, чем - 64 дБ, до 10 МГц. На низкой частоте предлагаемый VR имеет хороший PSR из-за высокого коэффициента усиления контура. PSR становится плохим в пределах частоты с единичным усилением из-за доминирующего полюса ω p . Выходной конденсатор С ВЫХОД улучшает характеристику PSR на высокой частоте. Эти результаты показывают, что они согласуются с предыдущим анализом, а предлагаемый VR обеспечивает лучший PSR во всем частотном диапазоне.
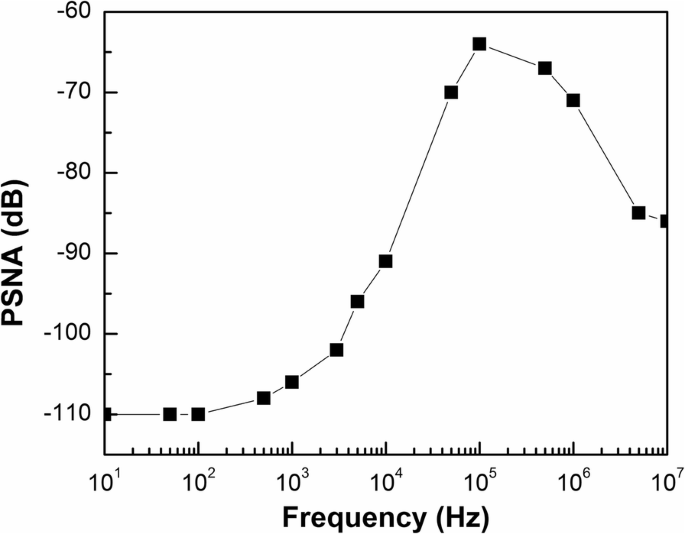
PSR предлагаемой VR
Результат линейного регулирования предлагаемого VR показан на рис. 12. В диапазоне входного напряжения от 5,5 до 30 В выходное напряжение изменяется только на 73,53 мкВ, что приводит к линейному регулированию всего на 2,98 мкВ / В. Это подтверждает эффективность предлагаемого СПТ.
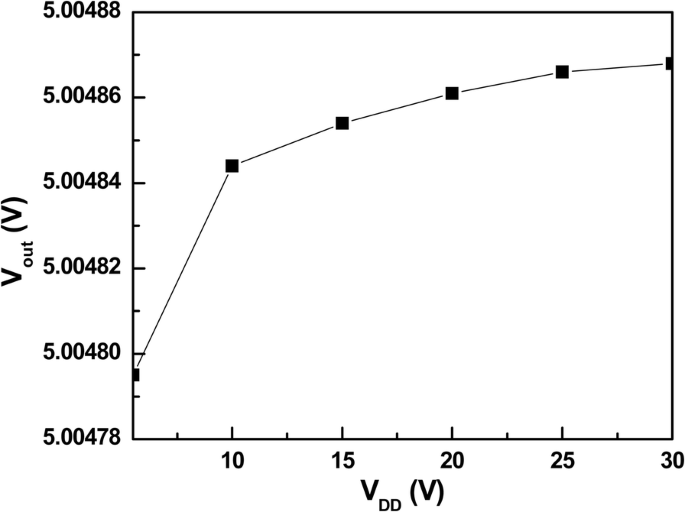
Линейное регулирование предлагаемой ВР
На рисунке 13 показана переходная характеристика выходного напряжения из-за разного тока нагрузки. Скачки и провалы регулируемого выходного напряжения составляют около 43 мВ, 65 мВ, 83 мВ при изменении тока нагрузки от 0 до 18 мА, 28 мА и 32 мА соответственно. Это приводит к регулированию нагрузки 0,233 мВ / мА, что в основном вызвано R 0 для стабильности с широким диапазоном выходной емкости.
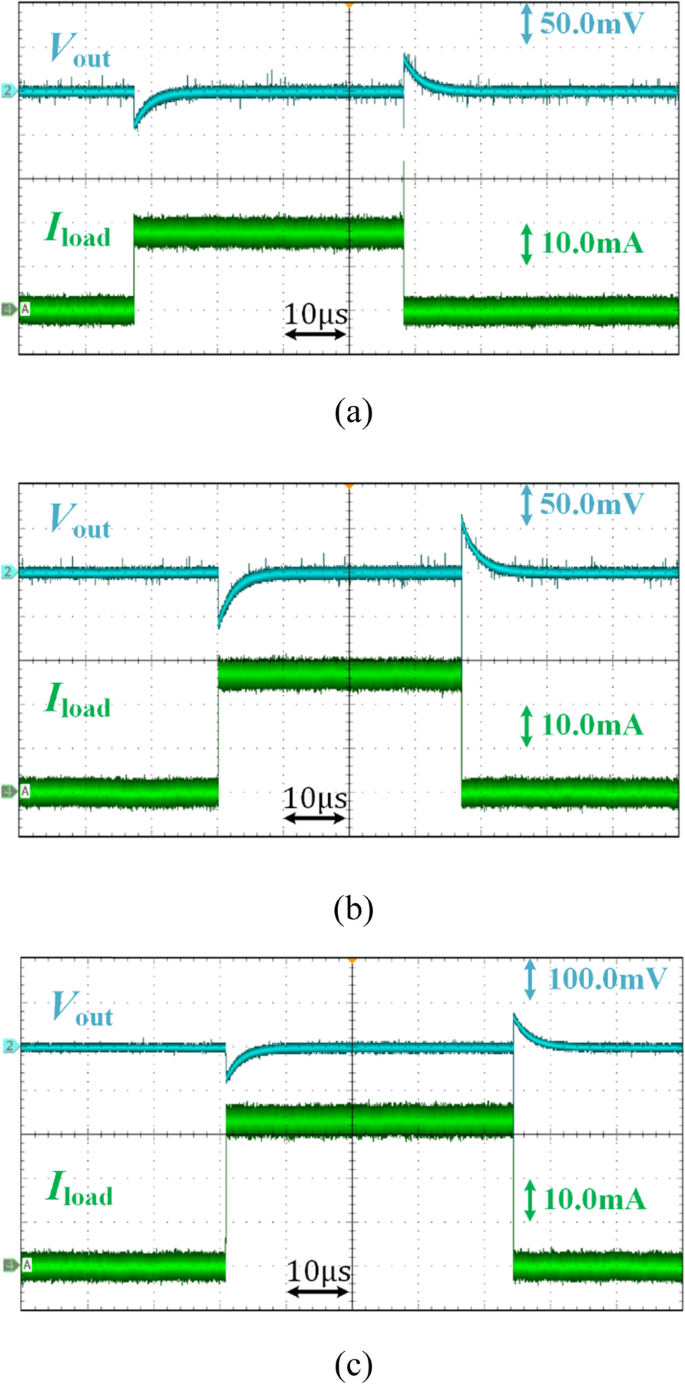
Форма волны переходной характеристики предлагаемого VR из-за другого шага тока нагрузки. а От 0 до 18 мА; б От 0 до 28 мА; c От 0 до 32 мА
Измеренные OCP показаны на рис. 14. Чтобы проверить эффективность OCP, на рис. 14a принято короткое замыкание. Как показано на рис. 14а, когда происходит перегрузка по току, когда выходное напряжение подтягивается к земле, выходной ток предлагаемого VR поддерживается на уровне около 40 мА. На рисунке 14b показана переходная характеристика между перегрузкой по току и нормальной нагрузкой, которая указывает на то, что предлагаемый VR имеет способность самовосстановления при выходе из перегрузки.
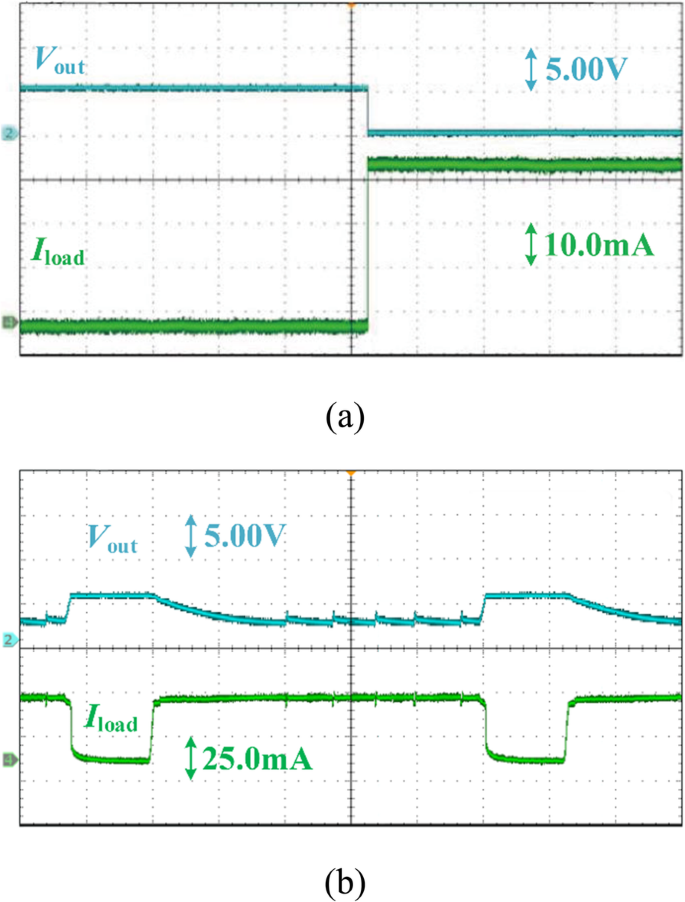
Измерение OCP предлагаемой VR. а короткое замыкание на выходе; б переходный процесс между перегрузкой по току и нормальной нагрузкой
В таблице 1 представлено сравнение производительности предлагаемого LDO и некоторых других ранее опубликованных LDO. Для сравнения, этот LDO имеет лучшее регулирование линии и PSR, которое выигрывает от предлагаемого SPT. Активная область будет еще больше уменьшена, если изготавливаться в более сложном процессе.
В таблице 2 представлено еще одно сравнение производительности, в котором основное внимание уделяется LDO-стабилизаторам, которые также имеют широкий диапазон источников питания. С помощью предложенных DLT и SPT эта работа имеет лучшую линейную стабилизацию и самый широкий диапазон питания по сравнению с другими LDO. Дополнительная функция OCP делает эту работу более конкурентоспособной и надежной.
Заключение
Высокостабильный SPT VR с DLT и OCP реализован в стандартном процессе BCD 0,35 мкм. С помощью SPT большая часть контура регулирования питается регулируемым выходным напряжением, что полезно для стабильности и улучшения PSR. Предлагаемый DLT полезен для кратковременного отклика и стабильности. Кроме того, встроенная схема OCP может предотвратить повреждение представленного VR в результате перегрузки или короткого замыкания. Линейное регулирование предлагаемого VR составляет 2,98 мкВ / В с VDD от 5,5 до 30 В, при этом регулируемое выходное напряжение составляет 5 В, а регулирование нагрузки составляет 0,233 мВ / мА при токе нагрузки от 0 А до 30 мА. Напряжение выбросов и провалов при изменении тока нагрузки также невелико при использовании представленной схемы усиления переходных процессов. PSR на низких частотах составляет - 110 дБ, а на частотах до 10 МГц лучше - 64 дБ. High loop stability can be achieved in a wide range of output capacitor and load current, and thus the proposed VR is suitable for applications that require high performance and reliability under variations of output capacitor and load current.
Доступность данных и материалов
All data generated or analysed during this study are included in this published article.
Сокращения
- VR:
-
Voltage regulator
- OCP:
-
Overcurrent protection
- SPT:
-
Self-power technique
- PSR:
-
Power supply rejection
- DLT:
-
Dynamic load technique
- EA:
-
Error amplifier
Наноматериалы
- Регулятор напряжения
- Уравнения и законы цепи постоянного тока
- Averager and Summer Circuits
- Напряжение и ток
- Конденсаторы и вычисления
- Комплексные вычисления напряжения и тока
- Maxim:двойной приемопередатчик IO-Link с регулятором DC-DC и защитой от перенапряжения
- ST:импульсный стабилизатор с широким диапазоном напряжений
- Настойчивость и настойчивость в руководстве
- 5 шагов для переосмысления операционной архитектуры и улучшения результатов с помощью Интернета вещей