


Моторизация Интернета вещей с помощью шаговых двигателей с батарейным питанием
В этой статье рассматривается, как шаговые двигатели хорошо работают в задачах, ориентированных на Интернет вещей, таких как размещение камер видеонаблюдения и удаленных датчиков или срабатывание вентиляционных отверстий, клапанов и окон. охватывает.
Смарт-объекты, оснащенные датчиками, уже играют жизненно важную роль в качестве «глаз и ушей» Интернета вещей. Но до недавнего времени существовало несколько практических решений, позволяющих наделить IoT-приложениями практичными и доступными «руками и руками», которые могли бы обращаться через Интернет и реагировать на то, что они видят или ощущают физически. Однако это меняется с появлением экономичных электронных драйверов, поддерживающих IoT, которые могут использовать небольшие аккумуляторные блоки для питания двигателей, шаговых двигателей, соленоидов и других типов исполнительных механизмов, которые переводят виртуальные намерения кибер-мира в реальные действия. .
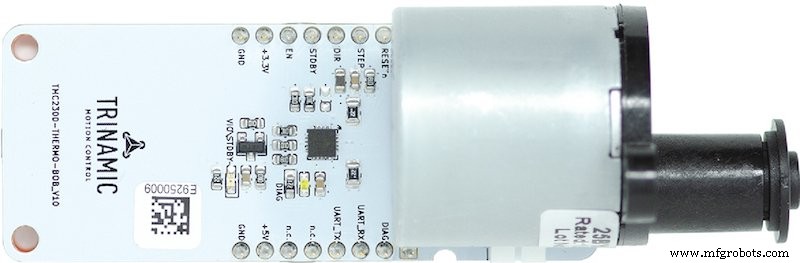
Рисунок 1а. Шаговые двигатели находят все большее применение в Интернете вещей, например в этом дистанционно активируемом контроллере радиатора.
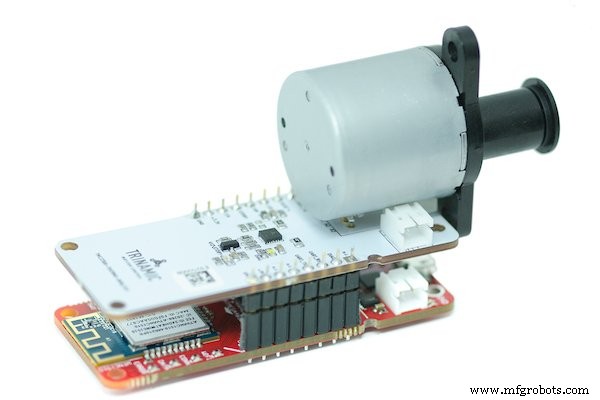
Рисунок 1b. Контроллер радиатора показан с платой разработки Microchip AVR IoT.
В этой статье мы сосредоточимся на шаговых двигателях, потому что их сегментированный ротор и структура якоря позволяют им вращаться небольшими, точными, дискретными шагами и сохранять свое положение без питания. Это позволяет им хорошо работать с задачами, ориентированными на Интернет вещей, такими как размещение камер видеонаблюдения и удаленных датчиков или активация вентиляционных отверстий, клапанов и оконных крышек.
Работа с источником ограниченного питания
Хотя некоторые моторизованные устройства IoT питаются от сети, в настоящее время требуется, чтобы все большее количество приложений работали в удаленных местах, часто с использованием относительно небольших источников энергии с низким напряжением, таких как один литий-ионный элемент или батарея AA или AAA. В случае многих приложений Интернета вещей дома и в офисе, эти приложения должны сливаться с окружающей средой, то есть у них не может быть кабеля питания.
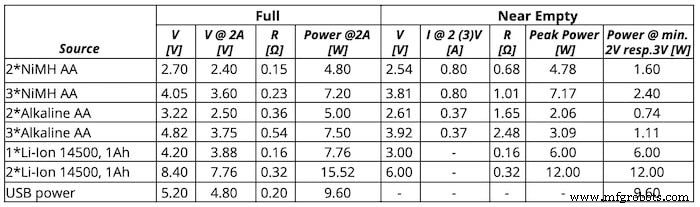
Теоретически питание от батареи будет работать для многих из этих приложений, потому что они используют двигатель нечасто, поэтому их влияние на ограниченную емкость батареи относительно невелико. Но батарея может быть не в состоянии обеспечить более высокое управляющее напряжение и относительно большие импульсы тока, которые требуются шаговому двигателю для питания его катушек. Как показано в таблице 1, наиболее распространенные батареи имеют значительное внутреннее сопротивление, которое снижает их выходное напряжение по мере увеличения выходного тока.
Таблица 1. Характеристики небольших батарей
К счастью, существует несколько простых стратегий для преодоления этих ограничений, включая буферизацию питания, повышающие преобразователи и настраиваемые шаговые двигатели. Давайте посмотрим, как работает каждая из этих стратегий.
Буферизация предложения
Простой метод, известный как «буферизация питания», можно использовать для дополнения ограниченной выходной мощности небольшой батареи путем добавления суперконденсатора, который может подавать короткие сильноточные импульсы.
Размер суперконденсатора можно рассчитать по формуле:
C =dU * I / t
Где:
dU =максимально допустимое внутреннее падение напряжения батареи,
Я =ток, необходимый для дополнения выходной мощности батареи, и
т =желаемое время работы
В настоящее время суперконденсаторы допускают максимальное рабочее напряжение всего 2,7 В и требуют схемы защиты, если напряжение питания может превышать это значение. Если требуются более высокие напряжения, два или более суперконденсатора могут быть включены последовательно, но в схему необходимо включить стабилитрон или какое-либо другое устройство для балансировки напряжений (рисунок 2).
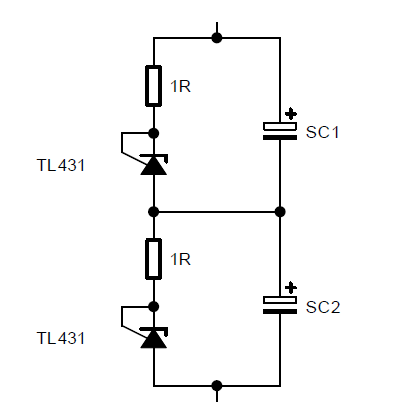
Рисунок 2. Схема балансировки суперконденсатора с защитой от перенапряжения на стабилитроне (2,5 В).
Суперконденсаторы, подходящие для этих типов приложений, сейчас широко доступны от многих производителей компонентов, включая Maxwell, Skeleton и Vishay.
Повышающие преобразователи
Некоторые ИС, в том числе многие популярные драйверы двигателей, испытывают трудности при работе на низком напряжении, доступном от небольших аккумуляторных блоков, особенно когда срок их службы подходит к концу. Повышающие преобразователи - это недорогие ИС, которые можно использовать для повышения напряжения батареи в три-четыре раза и для поддержания напряжения питания вашей системы на постоянном уровне к концу срока службы батареи. Эти преобразователи очень эффективны (90% -95%) при высоких нагрузках, но их эффективность несколько падает при небольшой нагрузке. Их можно использовать как автономное решение или вместе с суперконденсатором.
Производители ИС, производящие повышающие преобразователи, включают Analog Devices, Maxim Integrated и Texas Instruments. Одним из наиболее часто используемых преобразователей для этого типа приложений является MAX8969 от Maxim.
Степперы с индивидуальной настройкой
Большинство шаговых двигателей, даже небольших, рассчитаны на работу при напряжении от 5 до 12 В, тогда как большинство небольших батарейных блоков вырабатывают от 1,5 до 5 В. Для работы на этих более низких напряжениях шаговым двигателям требуются обмотки с меньшим количеством витков из более толстого провода с меньшим сопротивлением. К счастью, большинство производителей настроены на выполнение индивидуальных заказов за разумную плату или бесплатно.
Чтобы заказать двигатель с нестандартной обмоткой, вам необходимо указать ток катушки (ICOIL), определяемый как среднеквадратичный ток двигателя, который дает номинальный крутящий момент в состоянии покоя. Для этих типов приложений хорошо использовать двигатель, который будет обеспечивать необходимый крутящий момент при 50% -70% от его максимального номинального тока, чтобы минимизировать резистивные потери и обеспечить некоторый запас прочности.
Первым шагом в выборе обмоток является использование исходных технических характеристик двигателя производителя для расчета тока, необходимого для создания крутящего момента, необходимого для вашего приложения. Используйте это значение, чтобы рассчитать необходимое напряжение для данного типа двигателя, используя формулу ниже.

Этот расчет для условий покоя также достаточно точен для работы в режиме замедленного движения, где есть небольшая обратная ЭДС. На более высоких скоростях следует также учитывать постоянную обратную ЭДС двигателя CBEMF, используя следующее:

Эта формула использует частное удерживающего момента и заданного тока катушки. Обратите внимание, что в любой ситуации уменьшение RCOIL шагового двигателя позволяет снизить UBAT.
Если вы обнаружите, что требуемое напряжение для выбранного вами шагового двигателя превышает напряжение, доступное от вашего источника питания, обратитесь к производителю двигателя по поводу версии с нестандартной обмоткой, которая будет работать при более низком напряжении с использованием более высокого тока.
Собираем все вместе
Если вам интересно узнать больше о методах, представленных в этой статье, вы можете загрузить Trinamic Application Note № 57, Как сделать термостат с TMC2300, где используются практические примеры для более глубокого изучения многих из этих тем.
Теория, лежащая в основе этих методов, объясняется еще более подробно в статье «Проектирование системы управления низковольтным двигателем для мобильных и беспроводных устройств Интернета вещей», которую я представил на Embedded World 2020.
Дополнительные ресурсы
- Мастерская Inventables:основы шаговых двигателей
- Выбор подходящего двигателя для вашего проекта - постоянный ток, шаговый или серводвигатель.
- Вождение шагового двигателя - Adafruit Industries
- Оценочный комплект TMC2300-THERMO-BOB (PDF)
- Техническое описание:шаговый драйвер низкого напряжения Trinamic TMC2300
Отраслевые статьи - это форма контента, позволяющая отраслевым партнерам делиться полезными новостями, сообщениями и технологиями с читателями All About Circuits, что не подходит для редакционного контента. Все отраслевые статьи подлежат строгим редакционным правилам с целью предлагать читателям полезные новости, технические знания или истории. Точки зрения и мнения, выраженные в отраслевых статьях, принадлежат партнеру, а не обязательно All About Circuits или ее авторам.
Интернет вещей
- Возможность интеграции визуальных данных с IoT
- В пути с IoT
- Секреты инфраструктуры Интернета вещей с умным городом
- Реальные приложения IoT и почему время автономной работы так важно
- Службы подключения по требованию обеспечивают потребности приложений Интернета вещей
- Мир Интернета вещей:день из жизни с Vertica
- С предложениями платформы Lumada IoT Hitachi соединяет точки
- С корпоративным IoT лучшее еще впереди
- Разблокируйте ценность Интернета вещей с помощью мониторинга производительности
- Последние достижения и приложения в технологии Интернета вещей