


Что сдерживает интеграцию промышленных роботов?
Интеграция промышленных роботов - это узкоспециализированный, очень творческий и хитрый процесс, а люди, которые его практикуют, часто делают заслугу самой идеи человеческой изобретательности и изобретательности. Во многих отношениях интеграторы робототехники представляют собой корпус узкоспециализированных, высококвалифицированных архитекторов решений, которые помогают производителям стремительно повышать свою производительность.
К сожалению, есть несколько факторов, сдерживающих охват и охват интеграции промышленного робота назад. Кроме того, больше всего страдают от этого проверенные временем мастера - интеграторы робототехники, которым мы доверяем. Это не только потому, что трудно найти людей с нужными навыками для интеграции робототехники, но и потому, что сама работа может быть сложной, утомительной и иметь ограниченную отдачу во многих производственных сценариях.
Что их сдерживает в робототехнике? Ну, во-первых, программирование - это настолько сложный процесс, что усилия по его упрощению не оказали существенного влияния на многих интеграторов. Даже там, где программирование проще, роботы сегодня не созданы для адаптации к большому количеству деталей или неструктурированных средах, что эффективно защищает их от попадания на многие фабрики. Трехмерное зрение, объединение сенсоров и различные технологии обещают сделать роботов более автономными, но пока еще не было необходимых навыков и программного обеспечения, чтобы упростить задачу.
К счастью, правильные решения могут помочь интеграторам роботов, наконец, решить все эти проблемы сразу. Когда они это сделают, они откроют двери в различные отрасли, процессы и возможности обслуживания, которые раньше были просто невозможны.
Еще недостаточно упростить программирование
Сама концепция робототехники по сравнению с другими практиками современной инженерии все еще в некоторой степени граничит с областью научной фантастики. Как можно надежно автоматизировать процесс сто, тысячу или даже миллион раз без риска поломки, остановки или катастрофического повреждения?
Предлагаемые сегодня промышленные роботы - будь то от FANUC, Kuka, ABB, Kawasaki, Universal Robots или от других новых и нишевых поставщиков - на самом деле обычно соответствуют таким стандартам производительности, где, конечно, соблюдаются их технологические ограничения и требования к обслуживанию.
Достижения в области материалов сделали роботов от каждого из этих известных производителей легче, маневреннее и точнее, чем мы могли ожидать от людей. Это позволило каждому разработать разные толчки, возможности драйверов и многое другое.
Во всех этих случаях для достижения функций и необходимого уровня удобства использования были приняты важные решения при разработке и проектировании. Хотя этот процесс является кропотливым, он также приводит к расхождению в возможностях, программировании и пригодности разных роботов для разных операций. Опытные интеграторы роботов знают, как управлять моделями и работать в предпочтительных сценариях, но когда дело доходит до нехватки навыков и среды для развертывания - где они в противном случае могли бы расти и диверсифицировать свой бизнес - такое сочетание требований к программированию роботов может показаться невыгодным. путь.

В этом случае некоторые могут подумать, что объединяющее промежуточное программное обеспечение является основным способом «гармонизации» всех различных типов и функций роботов, чтобы упростить планирование и программирование операций роботов.
ROS (или, достаточно творчески, «Операционная система роботов») была выпущена в 2007 году для достижения этой цели. ROS, по крайней мере, предоставила систему, которая была полезна для ученых при разработке и совместном использовании приложений для роботов. К сожалению, это в конечном итоге не решило проблему, которую необходимо было решить промышленным интеграторам:возможность принципиально обойти многие ограничения, связанные с планированием, программированием и обработкой различных деталей и пространственных ограничений. Вместо этого все это могло бы позволить им встраивать, интегрировать и продавать больше роботов в новые процессы и отрасли.
Необходимость ограниченных или минимальных серий
В конечном счете, промежуточное ПО для роботов существенно не ускоряет интеграцию роботов, потому что «цикл остается открытым» - с каждым продуктом, процессом и программой, которую берет на себя робот, каждый шаг должен быть запрограммирован, протестирован и подтвержден в 100% предсказуемом наборе сценариев. . В конечном итоге это означает, что независимо от того, насколько инкрементным или вспомогательным является сценарий, на его подготовку уйдет столько же времени, сколько на подготовку вашего самого важного роботизированного процесса. Даже если вы упростите программирование, процесс, который требует постоянного повторения, это будет не так просто.
Хотя некоторые производители промышленных роботов рекламируют более простые языки программирования и методологии, в том числе более широкое использование HMI (человеко-машинных интерфейсов), каждый процесс все же в какой-то степени необходимо программировать вручную. Эта программа, созданная человеком, должна быть утверждена. Это означает, что в конечном итоге в процессе интеграции робототехники можно сэкономить лишь ограниченное количество времени.
Например, среди механических цехов растет тенденция к использованию роботов с ограниченным личным программированием для повторяемого процесса. Этот процесс позволит, например, быстро автоматизировать партию нескольких сотен металлических деталей с приличной степенью точности, но в конечном итоге по-прежнему потребует значительных человеческих усилий, контроля и переделок.
Хотя это можно рассматривать как выполнение большей части «беготни», это лишь ограниченно увеличивает производительность данного магазина и, кроме того, предоставляет ограниченные возможности для роста интеграторов роботов за счет продажи услуг новым клиентам. В то же время он не решает проблему переключения роботов между частями или в неструктурированных средах, или просто тех, которые не связаны с обширной отсадкой.
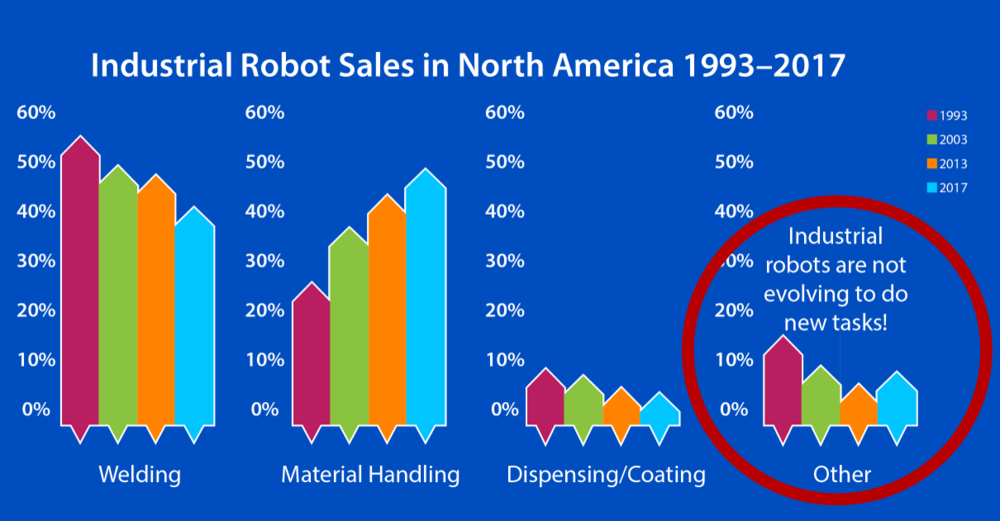
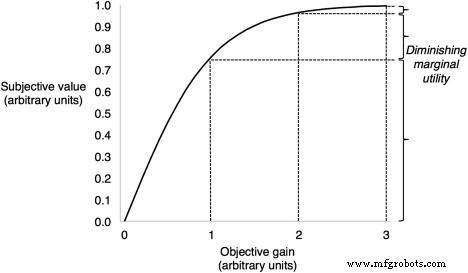
В конечном итоге это все равно становится жертвой закона «Убывающая предельная полезность». Для массовых производителей предельная полезность роботов относительно высока. Для механических цехов сейчас он выше, чем был раньше, но все еще слишком низок, чтобы обеспечить надежную клиентскую базу для интеграторов робототехники. Для производителей широкого ассортимента - тех, у которых тысячи артикулов и которые составляют большую часть обрабатывающей промышленности - предельная полезность роботов настолько мала, что немногие, если таковые имеются, регулярно используют робототехнику.
В этих случаях роботам нужна способность реально реагировать на детали и среду как можно ближе к «реальному времени». Новые достижения в области трехмерного зрения дают интеграторам робототехники возможность дать роботам эти чувства и, в конечном итоге, решить их проблемы программирования раз и навсегда - если, конечно, роботам будет предоставлена возможность программировать себя.
Ограниченные возможности восприятия и зрения
Примерно в то же время, когда ROS находилась в зачаточном состоянии, был разработан совершенно новый подход к трехмерному зрению. Sensor Fusion - изначально разработанный для виртуальных трехмерных сред, подобных тому, что было достигнуто с помощью системы Microsoft Xbox Kinect, - обеспечил относительно точный рендеринг объектов и сред, понятный компьютеру.
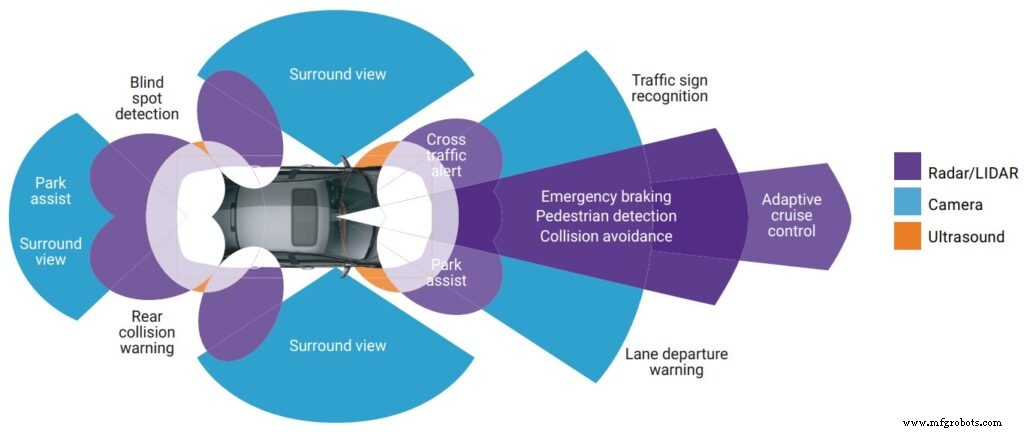
Перенесемся через несколько лет, и сочетание датчиков будет интегрировано в беспилотные автомобили и автономных мобильных роботов, а в системах виртуальной реальности, которые их породили, находит еще больше применений. Эта концепция - а не чисто визуальные датчики - уходит корнями в глобальную систему позиционирования (GPS), а также находит относительную поддержку во всем, от мониторинга HVAC до медицинских устройств.
Однако для промышленных производителей технология Sensor Fusion как полезное приложение только начинается. В то время как многие осваивают волну Индустрии 4.0 / IoT и пытаются интегрировать датчики в большем количестве мест, чтобы обеспечить удаленный мониторинг, варианты использования граничной обработки или профилактическое обслуживание, включение машинного зрения и робототехники на самом деле является лучшим способом, которым они могут хоть как-то реагировать. их роботы в производственных процессах. Предоставляя роботам возможность идентифицировать и обрабатывать объекты в космосе, они могут предоставить роботам своих заводов ту же автономию, которая присуща технологиям беспилотных автомобилей.
Некоторые из этих приложений существуют сегодня, но только для сложных сценариев или готовых наборов датчиков, которые поставляются крупными производителями промышленных роботов и периферийного оборудования. Они предлагают отличную отправную точку для интеграции большего количества роботов в средах с большим количеством участников, но они ограничиваются в основном выбором вариантов использования, а не процессами с добавленной стоимостью, где узкие места производства являются наиболее распространенными. В конечном итоге, пока робот не сможет самостоятельно сгенерировать программу на основе того, что он видит, он будет предлагать только постепенные улучшения в средах с высоким уровнем микширования.
Упрощение выхода в новые отрасли
Как интегратор робототехники, возможно, у вас действительно не будет времени для создания новых решений, включающих трехмерное зрение, объединение датчиков или новые и более сложные типы предложений с высоким уровнем смешивания. Многие могут быть вполне довольны своим бизнесом в автомобильной и аналогичной отраслях. Многие другие, возможно, будут счастливы постепенно переходить к большему количеству механических цехов и операций с высокой производительностью, где размер партии достаточно велик, чтобы оправдать использование роботизированного решения.
Однако для интеграторов, которые ищут способ развернуть больше робототехнических решений в отраслях, которые еще не видели их и не знают, с чего начать, технология Shape-to-Motion ™ от Omnirobotic может предложить способ. Эта технология ВИДЕТ, ПЛАНИРУЕТ и ВЫПОЛНЯЕТ процессы промышленного распыления, идентифицируя объекты по форме - независимо от их расположения в пространстве - с помощью 3D-зрения, а затем использует искусственный интеллект и технологические ноу-хау для создания уникального движения робота для каждой обрабатываемой детали. Затем он может выполнять процесс с высокой степенью детализации, качества и повышенной производительности, работая с существующими драйверами движения промышленных роботов.
Эта технология в конечном итоге позволяет интеграторам робототехники выполнять внедрение в сложных сценариях, будь то аэрокосмическая промышленность, тяжелое оборудование, основная мебель и бытовая техника. Это лишь некоторые - но не все - сценарии, в которых нанесение покрытий может выиграть от более усовершенствованных и точных роботизированных операций, но при этом просто имеет слишком много типов деталей чтобы оправдать время программирования, необходимое для любого из сегодняшних решений ручного программирования.
Omnirobotic предоставляет роботам технологию самопрограммирования, которая позволяет им видеть, планировать и выполнять важные промышленные процессы распыления и отделки. Команда Omnirobotic сочетает многолетний опыт с новыми возможностями искусственного интеллекта, чтобы обеспечить это с помощью так называемой технологии Shape-to-Motion ™, которая генерирует уникальные движения робота в реальном времени для каждой детали и конкретных требований. Посмотрите, какую окупаемость вы получите здесь .
Промышленный робот
- Какие промышленные роботы для покраски работают лучше всего?
- Промышленный робот
- Шарнирно-сочлененные роботы:руководство по самому знакомому промышленному роботу
- Типы промышленных роботов и их различные применения
- 12 самых популярных приложений промышленных роботов и их использования
- Профилактическое обслуживание промышленных роботов
- 6 шагов к успешной интеграции промышленного робота на вашем предприятии
- Промышленные роботы в автомобильной промышленности
- Оснащение промышленных роботов для работы в экстремальных условиях склада
- Три главных мифа об интеграции промышленных роботов