


Типы промышленных роботов и их различные применения
Откройте для себя множество типов промышленных роботов и их уникальные возможности. Получите четкое представление о каждом типе использования и применении роботов сегодня:роботизированные руки, мобильные роботы, воздушные дроны, подводные роботы и коботы.
Как вы решаете, какой тип промышленного робота вам подходит?
На рынке так много разных типов роботов - как узнать, какой из них использовать? Как и во многих вопросах проектирования и проектирования, «форма следует за функцией». То есть, какой тип робота нужен, зависит от его предполагаемой функции. Будет ли робот прикреплен к полу или другой поверхности, или он должен быть мобильным? Сколько единиц в час должен обрабатывать робот? Какой максимальный вес должен поднять робот? Если робот закреплен в одном месте, каков размер рабочего конверта? Рабочий конверт прямоугольный или круглый? Ответы на эти вопросы быстро сузят ваш выбор и позволят выбрать идеальный тип промышленного робота для ваших целей.
В этой статье мы исследуем разные типы роботов, их сильные и слабые стороны, а также то, как определить, для чего их использовать.
Содержание статьи
- Стационарные роботы (роботизированные манипуляторы)
- Автономные мобильные роботы
- Летающие роботы (воздушные дроны)
- Подводные роботы
- Как найти идеальный тип робота для вашей организации.
Стационарные роботы (роботизированные манипуляторы)
На рынке доступно семь основных типов стационарных роботов. Под стационарными мы подразумеваем роботов, которые прикреплены болтами к полу, потолку или какой-либо другой поверхности - они не мобильны. Как правило, стационарные роботы - это роботизированные манипуляторы, предназначенные для таких задач, как сбор и размещение, сортировка, сборка, сварка и отделка.
Здесь мы рассмотрим различные типы роботизированных манипуляторов, их характеристики и способы использования.
- Шарнирно-сочлененные манипуляторы
- Декартовы или прямоугольные роботы
- Роботы SCARA
- Полярные или сферические роботы
- Дельта или параллельные роботы
- Портальные роботы
- Цилиндрический
- Совместные роботы / коботы
Шарнирно-сочлененные руки роботов
Преимущества: Наиболее гибкое движение из всех типов манипуляторов роботов. Может быть довольно мощным, способен поднимать тяжелые предметы.
Недостатки: Может быть, нужно отгородить. Медленнее, чем у некоторых других манипуляторов. Дороже, чем другие роботы-манипуляторы. Нуждается в более сложных системах управления.
По сравнению с другими типами манипуляторов роботов движение шарнирно-сочлененной руки робота больше всего напоминает движение руки человека. Типичная шарнирная рука имеет шесть осей или суставов. Их может быть меньше или больше, в зависимости от приложения и производителя. Чем больше суставов у робота, тем более плавным и менее «роботоподобным» становится его движение. Эта гибкость движения описывается степенями свободы .
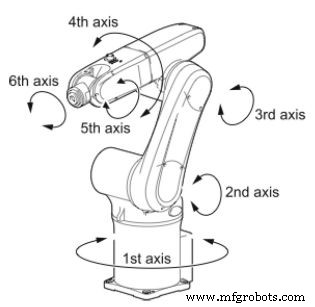
Интересный факт: Создатели искусственных рук считают, что человеческая рука имеет 27 степеней свободы. Рука человека имеет 7 степеней свободы, что в сумме дает 34 степени свободы для руки и кисти человека.
Воспроизвести все тонкие способы движения руки и кисти человека было бы слишком дорого и сложно для промышленного робота. Принято считать, что 6 степеней свободы манипулятора промышленного робота достаточно для выполнения практически любой задачи.
Робот не сможет играть на пианино, но и не обязательно!
В зависимости от области применения роботизированная рука может быть оснащена захватом, роботизированным эквивалентом руки. Обычно захваты роботов намного проще человеческой руки. Иногда они могут быть такими простыми, как присоска или электромагнит. Или, возможно, трехпалый мягкий захват можно использовать для захвата деликатных предметов, например свежих продуктов или яиц. Существует множество различных типов захватов, и пока не найдено ни одного робота-захвата, который мог бы справиться со всеми задачами.
В качестве альтернативы, оснастка End of Arm Tooling (EoAT), как ее называют, может быть каким-то инструментом, возможно, вращающимся инструментом, который удерживает сверло, или какой-либо другой коронкой для удаления заусенцев, шлифования или фрезерования. Есть много возможностей, включая специализированные EoAT для сварки, окраски, шлифования, лазерной резки и многого другого.
Шарнирно-сочлененные роботы очень гибкие, поскольку все их суставы могут вращаться, в отличие от линейных или поступательных суставов, которые могут двигаться только по прямой линии.
Шарнирно-сочлененные роботы используются в таких областях, как захват и установка, дуговая сварка, точечная сварка, упаковка, обслуживание машин и транспортировка материалов. Способность создавать дуги (или аналогичные узоры) в труднодоступных местах делает шарнирных роботов хорошим кандидатом для автомобильной промышленности и других производств, где эта способность требуется.
Исторически сложилось так, что большие и мощные роботы с шарнирно-сочлененной рамой, способные поднимать предметы весом в тонну или более, не были оснащены датчиками, которые позволяли бы им знать об окружающей среде. Если бы человек встал на пути такого робота, он мог бы получить серьезные травмы или даже погибнуть.
В результате такие роботизированные манипуляторы необходимо выделить в отдельное пространство. Только квалифицированный персонал, который полностью понимает принцип работы робота, имеет право входить в отгороженное или огороженное пространство, в котором работают такие роботы.
Однако, если шарнирно-сочлененная рука робота оснащена соответствующими датчиками и управляющим программным обеспечением, она может безопасно работать рядом с людьми. Например, используя компьютерное зрение с камерой или, возможно, датчиком LiDAR, если такой робот чувствует, что что-то находится на пути его движения, или даже что человек или объект приближается, но еще не мешает, робот может замедлиться или остановиться. Другие датчики могут обнаружить столкновение - если рука на что-то наткнется, она остановится и / или изменит курс. Обычно шарнирно-сочлененные руки, которые можно безопасно использовать вместе с людьми, имеют ограниченную скорость и силу.
Декартовы или прямоугольные роботы
Преимущества: Простая система управления. В зависимости от модели может поднимать очень тяжелые предметы. Точный. Жесткий по всем трем осям. Дешевле, чем шарнирно-сочлененные руки.
Недостатки: Не может делать вращательные движения.
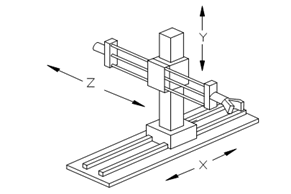
Эти роботы используют декартову систему координат (X, Y и Z) для линейных перемещений по трем осям (вперед и назад, вверх и вниз и из стороны в сторону). Все три сустава являются поступательными, что означает, что движение сустава ограничено движением по прямой. Поэтому таких роботов еще называют «линейными».
Декартовы роботы могут использоваться для захвата и размещения, погрузочно-разгрузочных работ, автоматизации упаковки, хранения и извлечения, резки и сверления, а также для многих других приложений.
Они жесткие во всех трех измерениях, что делает их очень точными и воспроизводимыми. Они проще, чем шарнирные роботизированные руки, с более простым программным управлением и могут быть менее дорогими в зависимости от области применения.
Портальные роботы - разновидность декартовых роботов
Преимущества: В зависимости от модели может поднимать очень тяжелые предметы. При желании может быть сделана очень большой, охватывая всю длину помещения. Может быть очень рентабельным для правильных приложений.
Недостатки: Не может делать вращательное движение.

Декартовы или линейные роботы могут быть сконфигурированы как портальные роботы. Портальные роботы перемещаются по эстакаде. В зависимости от конструкции портальные роботы могут справляться с очень тяжелыми грузами и перемещать их быстро и точно. При необходимости их можно сделать очень большими, покрывающими всю площадь помещения. Меньшие портальные роботы могут быть полезны для подбора и других операций, требующих высокой точности и хорошей жесткости.
Поскольку аспект управления движением линейного робота относительно прост, он часто обходится дешевле, чем другие типы роботов, и может быть очень рентабельным решением для многих задач автоматизации.
Рабочая зона декартового робота прямоугольная. Добавление вертикального движения означает, что рабочий конверт имеет форму коробки.
Роботы SCARA
Преимущества: Отлично подходит для многих сборочных приложений. Быстро и точно. Экономичен при сборочных операциях.
Недостатки: Не такой гибкий, как шарнирно-сочлененные. Не так точно, как декартовы руки. Не так быстро, как роботы-манипуляторы Delta.
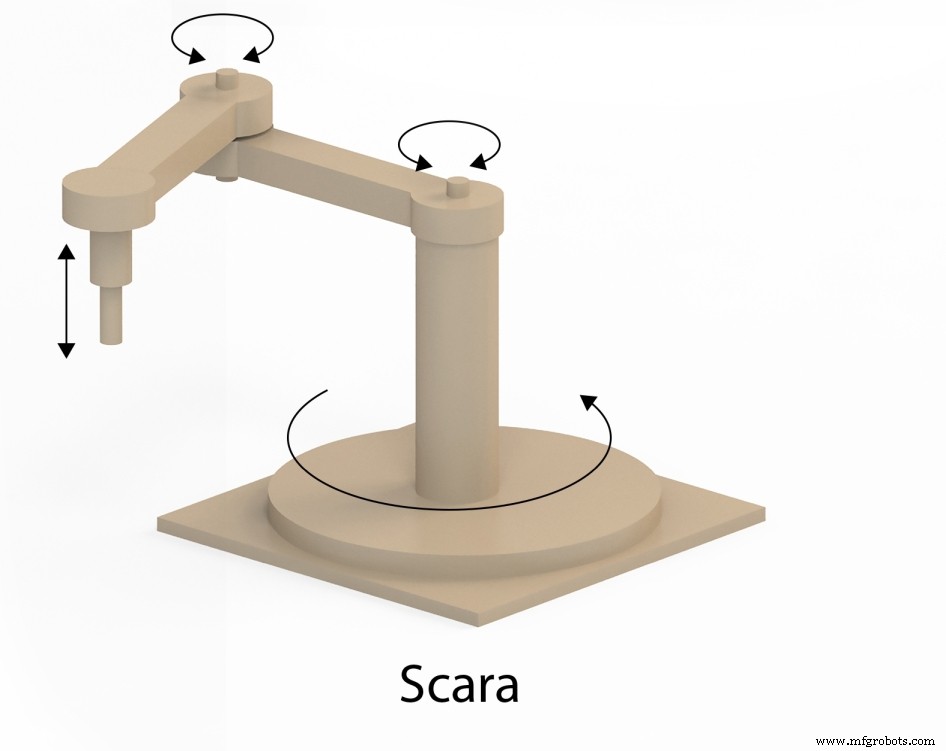
Роботы SCARA (рука робота избирательной сборки соответствия) похожи на декартовых роботов в том, что они перемещаются по 3 суставам или осям. Однако, в отличие от декартовых роботов, два сустава роботов SCARA вращаются. Следовательно, они способны к более сложным движениям, чем декартовы роботы. Как правило, они быстрее и обладают большей гибкостью в движении, но менее точны, чем декартовы роботы.
Интересный факт: Широкое использование роботов SCARA произвело революцию в малой электронной промышленности. Благодаря малой занимаемой площади, простоте и конструктивным характеристикам они отлично подходят для этой области применения и доказали свою высокую рентабельность.
Как следует из слова «сборка» в названии, роботизированная рука SCARA была изобретена для сборочных приложений. Робот SCARA был создан в 1981 году Хироши Макино из Университета Яманаси в Японии. «Соответствие» в названии означает некоторую отдачу. То есть, если вы толкнете робота SCARA в горизонтальной плоскости, он немного поддается - он будет двигаться, он не совсем жесткий. Однако в вертикальной плоскости робот SCARA достаточно жесткий, и он не будет «давать», если вы толкнете его в этом направлении. Следовательно, он имеет «выборочное» соблюдение. Он податлив в горизонтальной плоскости, а не в вертикальной.
Выборочное соответствие весьма полезно при сборочных операциях, когда деталь необходимо вставить, например, в печатную плату. Такой вид сборки часто требует, чтобы деталь вставлялась в отверстие. Для центрирования детали в отверстии часто требуется небольшая «податливость», чтобы найти центральную точку - немного покачиваться или немного «уступить». Затем усилие введения, двигающееся вниз, должно быть твердым и жестким.
Роботы SCARA менее жесткие, чем декартовы роботы, а также ограничены по весу, который они могут поднять, по сравнению с декартовым роботом, который может поднимать довольно тяжелые предметы. Роботы SCARA занимают мало места и обычно используются в приложениях, в которых расстояние перемещения относительно невелико. У них меньше степеней свободы, чем у шарнирных рычагов. С другой стороны, они обладают высокой точностью и достаточно воспроизводимы. И они дешевле, чем шарнирно-сочлененная рука.
Рабочая зона робота SCARA имеет цилиндрическую форму, что также необходимо учитывать при рассмотрении заявки. Роботы SCARA, как правило, быстрее шарнирных манипуляторов, хотя и не так быстры, как роботы Delta.
Полярные или сферические роботы
Преимущества: Более простая система управления, чем шарнирный рычаг. Может иметь большой радиус действия. Очень хорошо подходит для многих сварочных работ. Может быть быстрее, чем шарнирная рука.
Недостатки: Не такой гибкий, как шарнирно-сочлененные манипуляторы. Старая технология. Часто требуется довольно большая занимаемая площадь. Не так быстро, как оружие Delta.
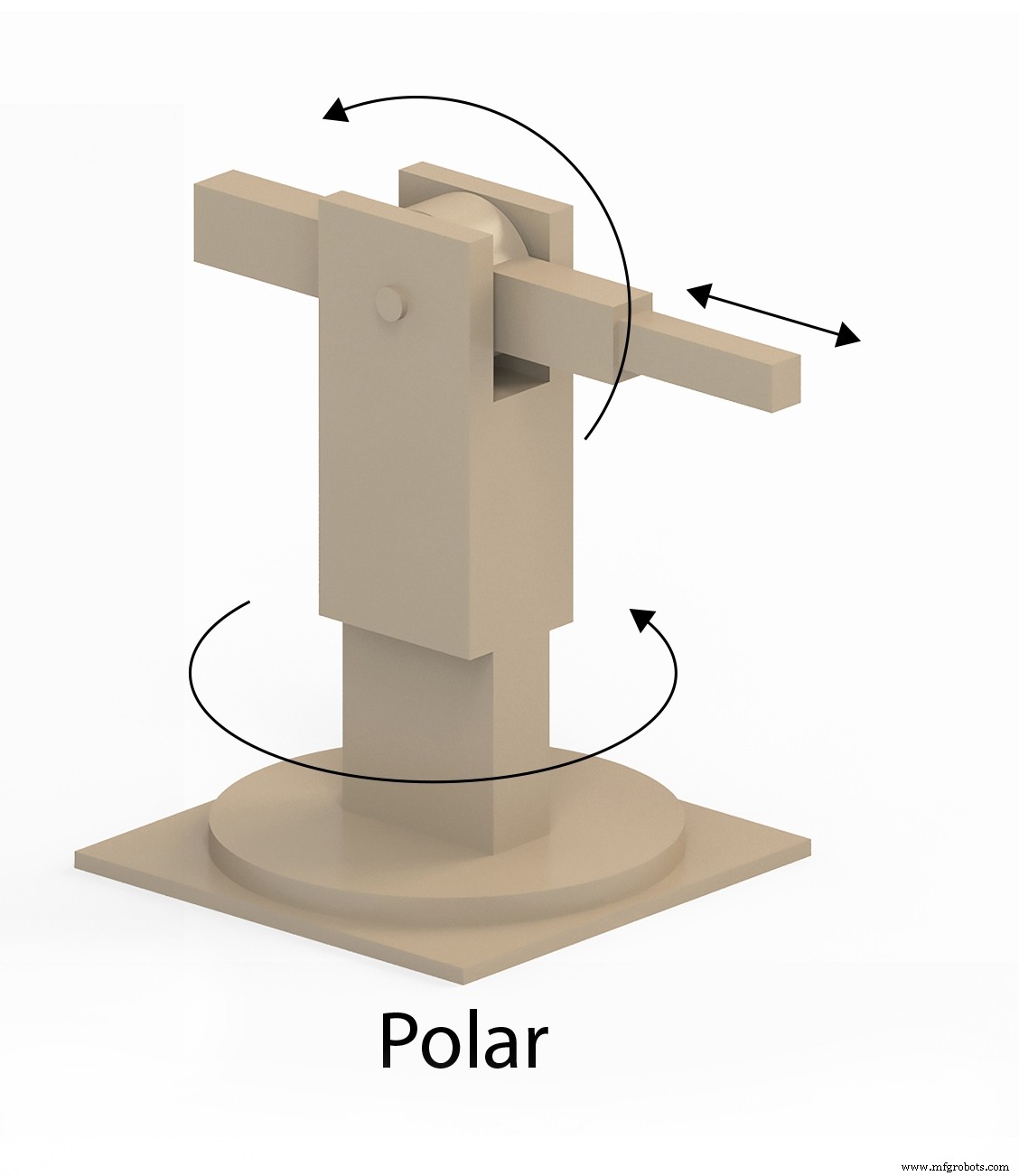
Полярные роботы (иногда называемые сферическими роботами) имеют комбинацию двух вращательных шарниров и одного линейного шарнира. Их конструкция создает рабочее пространство сферической формы.
Интересный факт: Первый промышленный робот (созданный в 1950-х годах), названный «Unimate», был сферическим роботом.
Роботы Polar могут использоваться для литья под давлением, окраски, дуговой сварки и точечной сварки. Они могут иметь большой радиус действия, если оснащены линейным рычагом подходящего размера.
Полярные роботы являются более старой технологией и могут быть заменены роботами с шарнирно-сочлененной рукой (которые также имеют сферическую рабочую зону), хотя в некоторых приложениях полярный робот может быть более рентабельным, чем его альтернативы.
Дельта-роботы
Преимущества: Самая быстрая разработка манипуляторов для операций по подбору и размещению. Легкий. Точный.
Недостатки: Ограничено относительно небольшими и легкими объектами. Не подходит для работы с объектами в вертикальной плоскости. Ограниченный охват.
Роботы Delta (также называемые параллельными роботами) имеют три роботизированных руки в форме параллелограммов. Обычно дельта-робот располагается над заготовками на подвесной эстакаде. Поскольку все двигатели находятся на основании, суставы и руки робота очень легкие по сравнению с другими роботами. Робот Delta имеет перевернутую куполообразную рабочую зону.
Интересный факт: Робот Delta изначально был разработан для того, чтобы производитель шоколада мог собирать кусочки шоколада и складывать их в коробку.

Конструкция робота Delta обеспечивает высокую скорость и точность работы. Роботы Delta в основном используются при подборе и размещении. Дополнительные области применения включают дозирование клея, пайку и сборку. Роботы Delta не могут нести тяжелую нагрузку, и это ограничивает типы инструментов End of Arm (EoAT) и задачи, с которыми они могут справиться.
В гибридных конструкциях роботов Delta иногда размещаются вращающиеся шарниры на концах рук, чтобы увеличить гибкость их движения.
Цилиндрические роботы
Преимущества: Жесткий. Точный. Идеально подходит для приложений, требующих круглой геометрии.
Недостатки: Старая технология. Ограниченная гибкость движений.
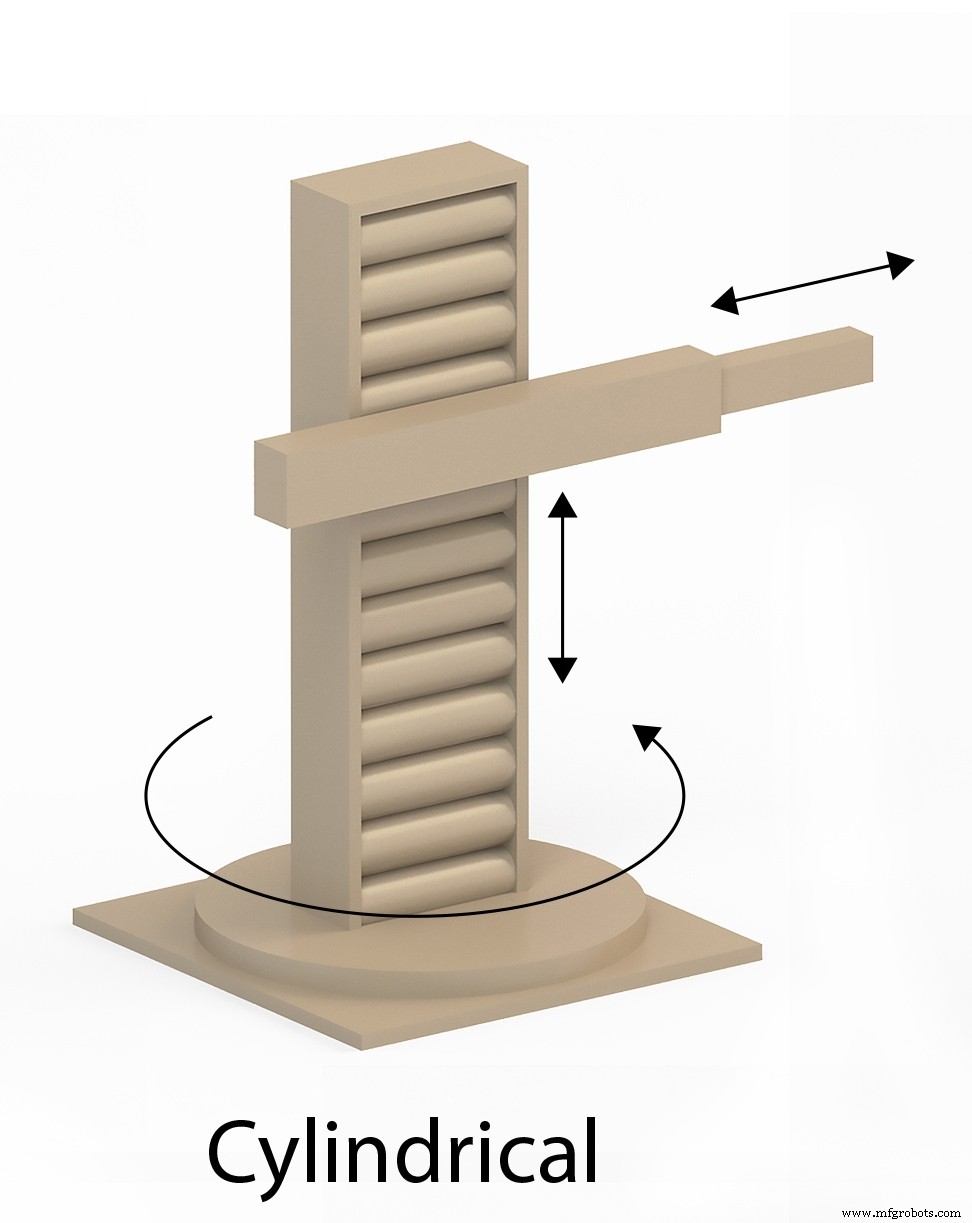
Цилиндрические роботы иметь как минимум одно вращающееся соединение в основании и два линейных шарнира. Такой дизайн приводит к рабочему пространству цилиндрической формы.
Цилиндрические роботы обычно используются в тесных рабочих пространствах, и они идеально подходят для объектов, которые должны иметь круговую симметрию (например, провода, трубы). При шлифовании, сборке и точечной сварке используются цилиндрические роботы.
Совместные роботы (коботы)
Преимущества: Безопасно работать вместе с людьми. Современные интерфейсы позволяют «научить» манипулятор робота, что делать без написания кода.
Недостатки: Не всегда самый быстрый робот-манипулятор. Ограничены по силе и скорости.
Совместные роботы (коботы) обеспечивают взаимодействие человека и робота в безопасной рабочей среде без необходимости использования ограждений или других мер безопасности, применяемых в традиционных промышленных роботах. Однако меры безопасности приводят к снижению скорости работы.

Помимо безопасности работы вместе с людьми, одной из функций, которые делают коботов более совместными, является способность оператора обучать манипулятор робота совершать движения без необходимости писать программный код. Оператор хватает манипулятор робота и физически перемещает его в нужном направлении. Затем рука робота может воспроизвести продемонстрированное движение.
Стандартный кобот обычно не предназначен для работы с очень тяжелыми предметами. Это накладывает ограничения на диапазон продуктов, которыми он может управлять.
Совместные роботы имеют широкий спектр применений, таких как обслуживание машин, захват и установка, сборка, дуговая сварка, но, как правило, они не подходят для тяжелых условий эксплуатации или задач с очень высокой скоростью.
Автономные мобильные роботы

AMR или автономные мобильные роботы представляют собой быстрорастущий сегмент рынка промышленных роботов. Они бывают разных форм и размеров, оптимизированные для задач, для которых они предназначены.
Колесные тележки
AMR в виде тележек или транспортных средств с колесами обычно используются для перевозки товаров на заводе или складе. Они оснащены датчиками, бортовой вычислительной мощностью и электродвигателями, которые позволяют им перемещаться по объекту и создавать его внутреннюю карту. Часто это делается с человеком, который следит за AMR и направляет его с помощью пульта дистанционного управления.
После создания внутренней карты AMR может быть проинструктирован относительно пунктов назначения, в которые он должен отправиться. Ключевой особенностью AMR является то, что они могут независимо («автономно») перемещаться из одного места в другое, избегая препятствий на своем пути. Если человек, погрузчик или другой объект преграждает им путь, они могут свернуть, чтобы избежать препятствия, или даже спланировать совершенно новый маршрут к месту назначения.
Автономные возможности AMR делают их очень гибкими по сравнению с конвейерной системой.
AMR в виде колесных тележек можно использовать по отдельности для перевозки товаров, а также их можно использовать как часть роя или парка роботов. Например, Amazon использует парки AMR. Amazon использует так называемую конфигурацию «товары для человека», в которой каждый робот берет целую полку продуктов и приносит их человеку на станции сбора заказов. Затем человек берет товар (-ы) с полки и помещает его в контейнер для выполнения заказа в электронной коммерции.
В последнее время достижения в области компьютерного зрения, искусственного интеллекта и технологий захвата сделали возможным заменить человека на сборочной станции шарнирно-сочлененной роботизированной рукой. В этом случае колесная тележка AMR доставляет товары в руку робота для взаимодействия робота с роботом.
Автономные транспортные средства (AGV)
AGV обычно имеют форму транспортного средства с колесами, и это более старая технология, чем AMR. У них меньше бортового интеллекта и, следовательно, они не так автономны, как AMR. У AGV нет возможности составить карту объекта. Вместо этого они полагаются на проложенные для них пути. Пути определяются проводами, помещенными в пол, или специальной лентой, или другими видами направляющих. Если AGV встречает препятствия на своем пути, он может только остановиться и позвать на помощь.
Однако различия между AGV и AMR становятся все более размытыми. AGV получают больше бортовых вычислительных мощностей, и некоторые из них теперь имеют возможность преодолевать препятствия на своем пути.
AMR с роботизированными руками
Роботизированный манипулятор может быть установлен на тележке AMR на колесиках. Это увеличивает гибкость робота и увеличивает разнообразие задач, которые он может выполнять. Одно из применений - использовать такого робота для обслуживания целого ряда станков. Робот может выгружать готовую деталь и загружать новую заготовку в один станок, а затем двигаться вниз по ряду и повторять операции для ряда станков.
Роботы на ножках
Миллионы людей видели на YouTube видео танцующих роботов, созданное Boston Dynamics, и поэтому видели двуногих и четвероногих роботов. Одно из промышленных применений роботов на ногах предполагает их развертывание для доставки посылок. Другой вариант использования - поисково-спасательные операции.
Использование ног вместо колес имеет определенные преимущества. Ноги позволяют роботу перемещаться по местности, которую тележки с колесами могут найти трудными или невозможными. Ноги позволяют подниматься по лестнице, а также легче садиться в автомобиль и выходить из него, чем тележка с колесами.
Сферические AMR
Автономные мобильные роботы в форме шара коммерчески доступны и имеют особые преимущества перед другими форм-факторами. Компоненты системы AMR сферической формы герметизированы внутри прочной оболочки. Это позволяет им работать в суровых условиях. Они также могут плавать и путешествовать по воде. Сферические AMR могут быть амфибиями, путешествовать как по воде, так и по суше.
Силовая установка сферического AMR чаще всего основана на смещении центра тяжести.
Промышленные применения сферических AMR - это, прежде всего, наблюдение и дистанционный контроль. Оснащенные камерами и средствами связи, они могут передавать видео обратно удаленному оператору. Для агрессивных сред, в которых может быть токсичный газ или другие опасные условия, сферический AMR может быть идеальным.
Летающие роботы (дроны)
Беспилотные летательные аппараты (БПЛА) или дроны все чаще используются в различных промышленных целях. Одно из приложений - использовать дроны на складах для инвентаризации. Дрон может летать по проходам склада и с помощью компьютерного зрения подсчитывать количество предметов в коробках на полках.

В зависимости от конструкции промышленный дрон может быть разновидностью автономного мобильного робота (AMR), поскольку некоторые модели могут автоматически обнаруживать препятствия и избегать их, а также самостоятельно прокладывать путь к месту назначения. Некоторым промышленным дронам можно дать «задание», которое может состоять в полете над горнодобывающей промышленностью или над инфраструктурным проектом. Дрон выполняет свою миссию автономно и может записывать видео проекта или производить определенные измерения и записывать их. Такие дроны можно использовать для наблюдения за ходом строительства.
Amazon и другие компании уже ограниченно используют дроны для доставки товаров длительного пользования и продуктов.
Подводные роботы

Существует множество роботов, предназначенных для использования под водой. Некоторые подводные роботы спроектированы как автономные (автономные подводные аппараты - БПЛА), а некоторые созданы для дистанционного управления, по беспроводной связи или с помощью проводного троса. Некоторые подводные роботы используют гребные винты в качестве двигательной установки, аналогичные подводным лодкам. С другой стороны, многие такие роботы имитируют действия живых существ для их движения. Некоторые имитируют действия дельфинов, другие - змей, а третьи двигаются, как рыбы. Подобное подражание природе называется «биомимикрией», потому что действия робота имитируют биологические существа.
Подводные роботы могут использоваться для обследования морских нефтяных платформ, трубопроводов и для научных исследований. Другие приложения включают использование подводных роботов для осмотра дна мостов, осмотра водозаборов гидроэлектростанций и осмотра коралловых рифов.
Подводные роботы используются полицейскими управлениями для записи на видео дна водоемов в поисках улик. Военные также интересуются подводными роботами. Может ли гидролокатор отличить робота-дельфина от настоящего?
У подводных роботов много преимуществ. Такие роботы означают, что не нужно нести риск и расходы, связанные с дайверами-людьми. Роботы могут оставаться под водой дольше людей. Equipping underwater robots with sensors enables them to measure and record an almost infinite number and types of properties
How to source the ideal robot type for your organization
HowToRobot is a global platform helping companies to succeed with automation. By using the HowToRobot worldwide directory of over 15,000 robotics companies, you can find the type of robot you need, ideally suited for your application.
If you already know what type of robot you need, and want to get more information from robotics vendors, you can get quotes and receive product information and pricing from multiple vendors through HowToRobot.
If you are not sure what kind of robotic component or part you need and would like to simply describe your application and some of your Key Performance Indicators (KPIs) and goals you’d like to achieve through automation, you can submit a Request for Information and receive responses from vendors who can supply you information about their solutions.
Please note there are impartial HowToRobot experts who can help you navigate through the process. Click here to set up a consultation with an expert advisor.
Промышленный робот
- Различные типы промышленных лестниц и их применение
- Типы кранов EOT и их использование
- Различные сорта алюминиевой бронзы и их применение
- 5 важных промышленных металлических сплавов и их применение
- Различные типы ударов и их использование
- Каковы различные типы ударов и их использование
- Понимание различных типов штамповочных инструментов и их основных применений
- Различные типы цветных металлов и их использование
- Различные типы литья под давлением и их применение
- Разновидности токарных станков и их классификация