


Роботизированная рука Arduino IoT
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 5 |
Приложения и онлайн-сервисы
 |
| |||
 |
|
Об этом проекте
Это моя первая роботизированная рука со следующими характеристиками:
- Робот 5DOF, на самом деле 4, если исключить захват.
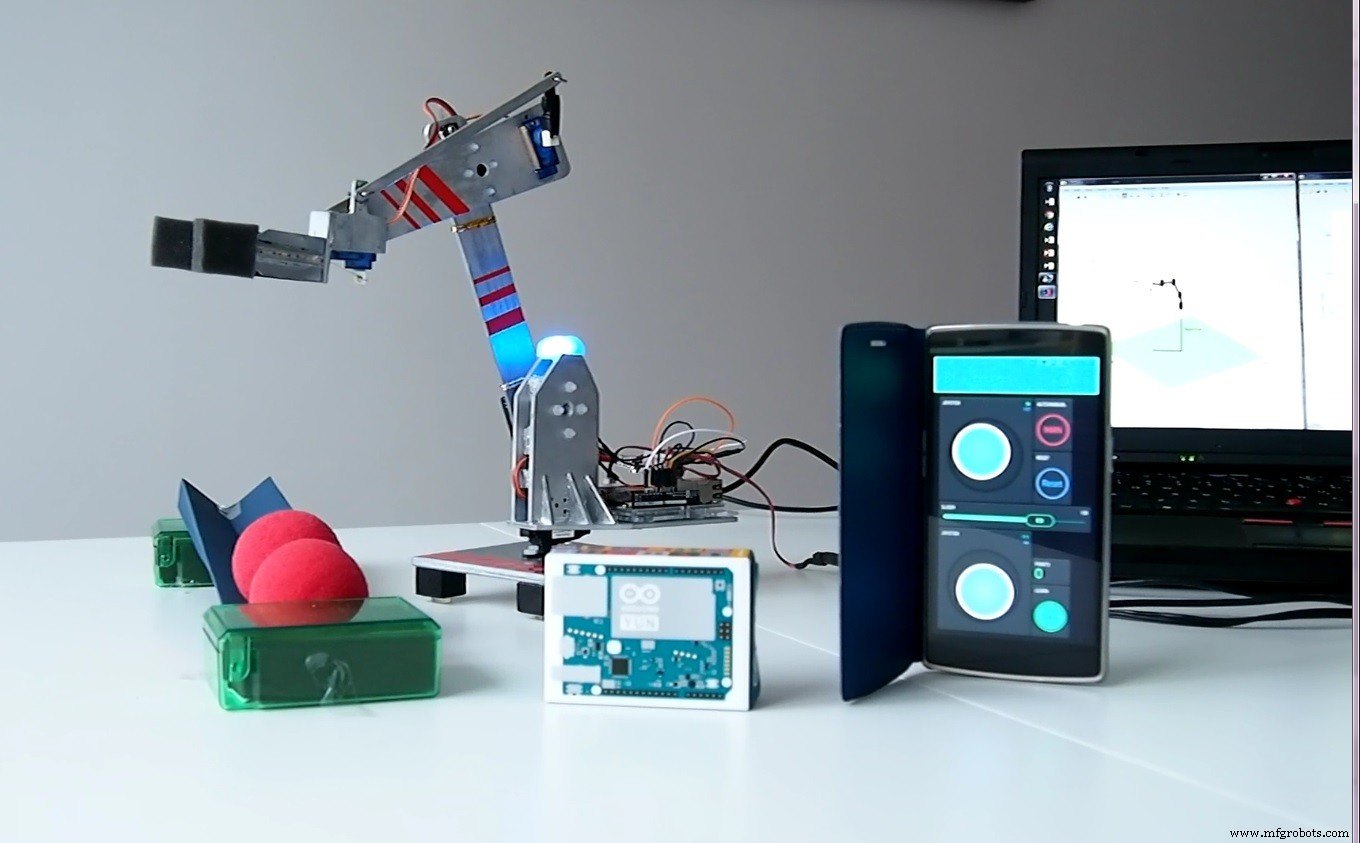
- мозг - это Arduino Yun с возможностями Интернета вещей
- интерфейс управления встроен в приложение Blynk
- прямая кинематика реализована в Matlab с помощью Robotics Toolbox
- написанная мной новая библиотека, обеспечивающая плавное движение.
Результатом очень довольна. Поэтому я хотел бы поделиться с вами своим опытом и способами его создания.
Компоненты и материалы
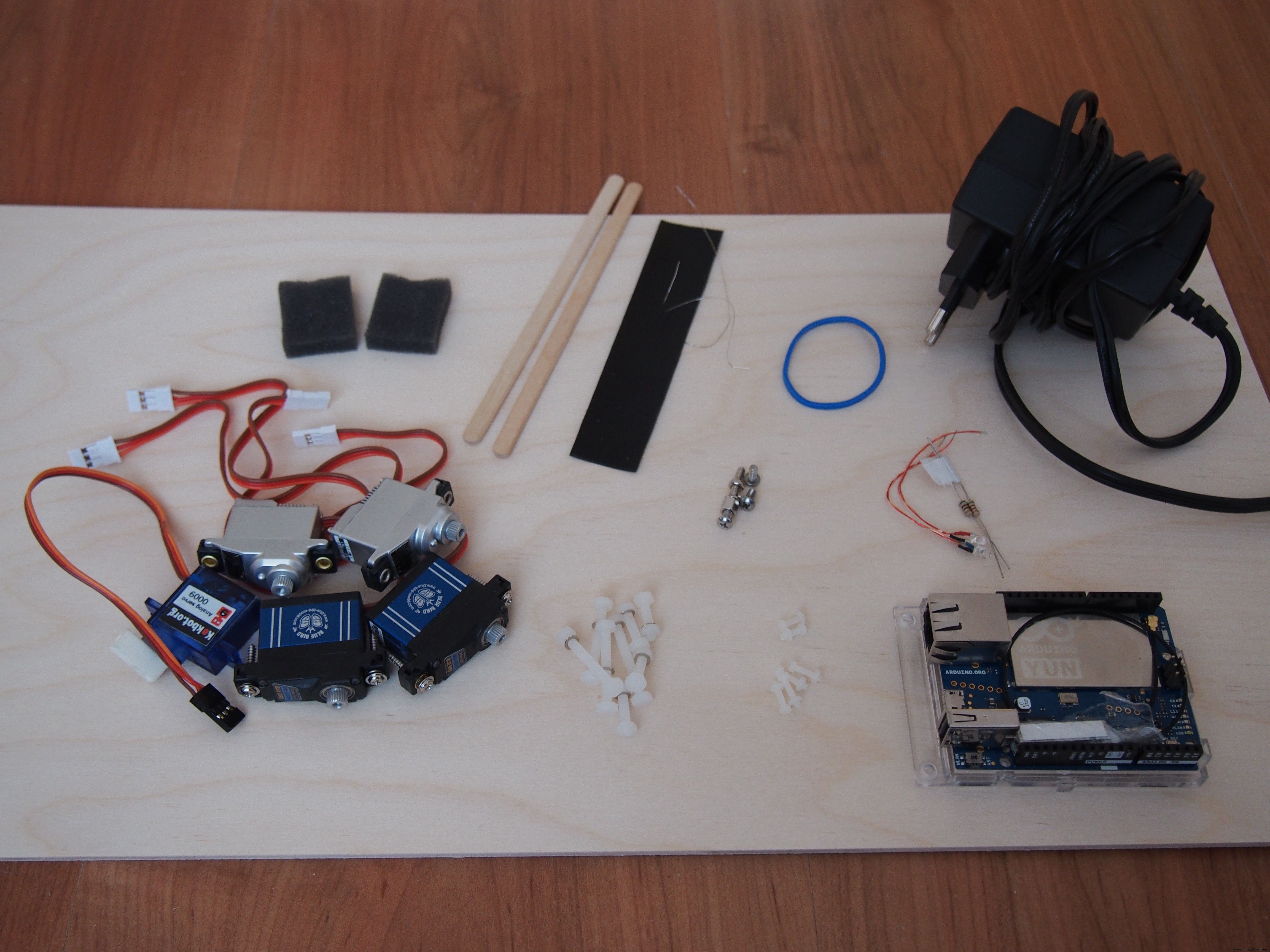
Для сборки робота вам потребуется:
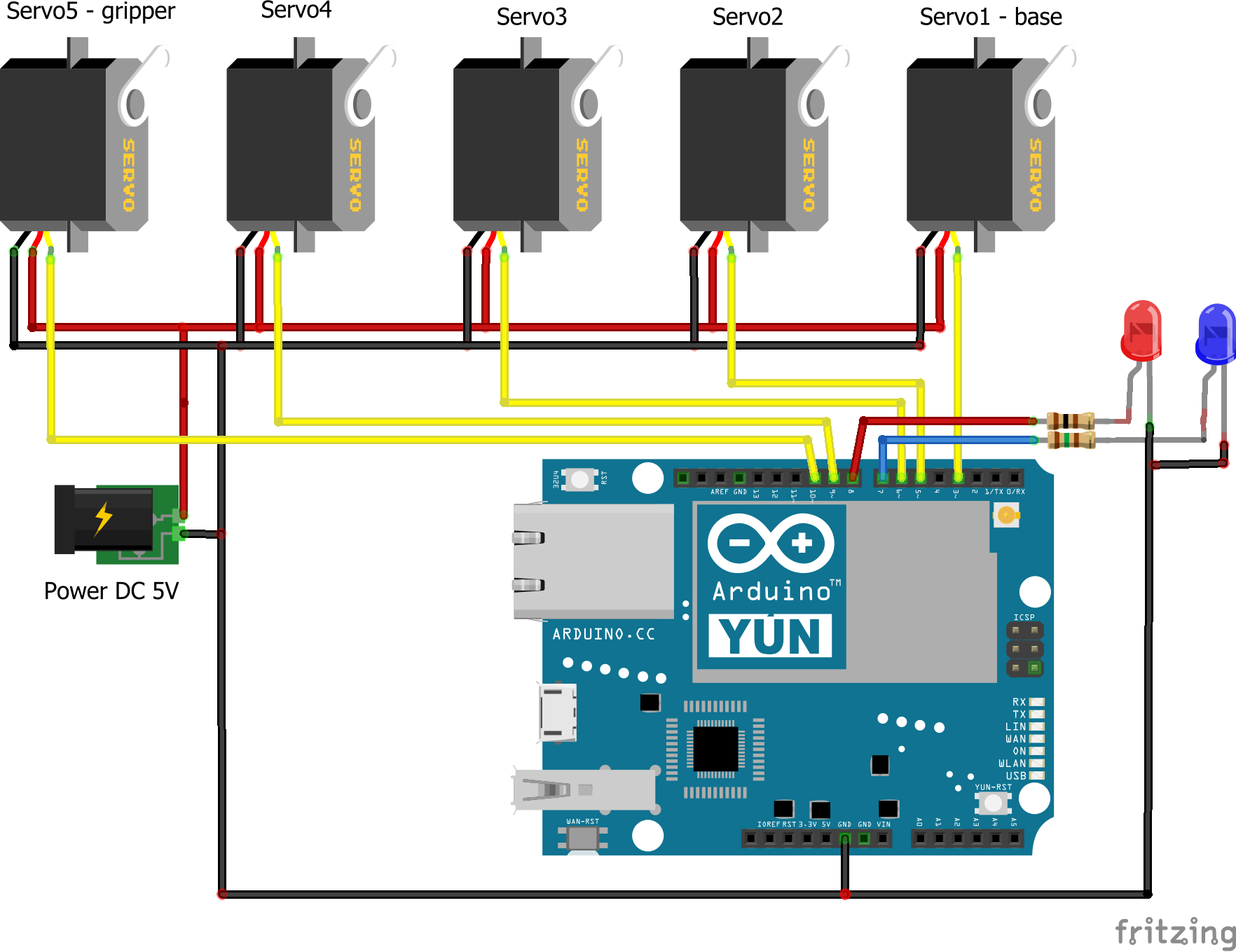
- 1 x Arduino Yun (или любая плата Arduino)
- 5 серводвигателей
- 1 зарядное устройство на 5 В, мин. 2,5 А
- 2 светодиода
- 2 резистора, 100 Ом (для красного светодиода) и 150 Ом (для синего светодиода) соответственно.
- 2 деревянные палочки для смешивания
- 1 металлический провод (или аналогичный)
- 1 пластиковый лист (я взял его из флакона с гелем для душа)
- 1 резинка
- 2 маленьких губки (см. левый верхний угол)
- 9 пластиковых винтов M3.
- 6 пластиковых винтов M2,5
- 1 деревянная пластина 3 мм (30 x 50 см должно быть более чем достаточно)
- 1 шт. столярного клея.
- время писать код
Сборка робота
Для создания робота начните с измерения размера сервоприводов и проверки крутящего момента сервоприводов. Это даст вам представление о размере рук и, в конечном итоге, о размере робота. В моем случае я заказал 2 разных микро сервопривода с высоким крутящим моментом:первую пару и вторую пару. Они могут двигаться до 140 градусов, даже если они рассчитаны на 120 градусов. Однако я советую покупать сервоприводы на 180 градусов, чтобы иметь больший угол хода.
Для захвата нет необходимости в сервоприводе с высоким крутящим моментом. Самый дешевый микро-сервопривод на ebay справится с этой задачей.
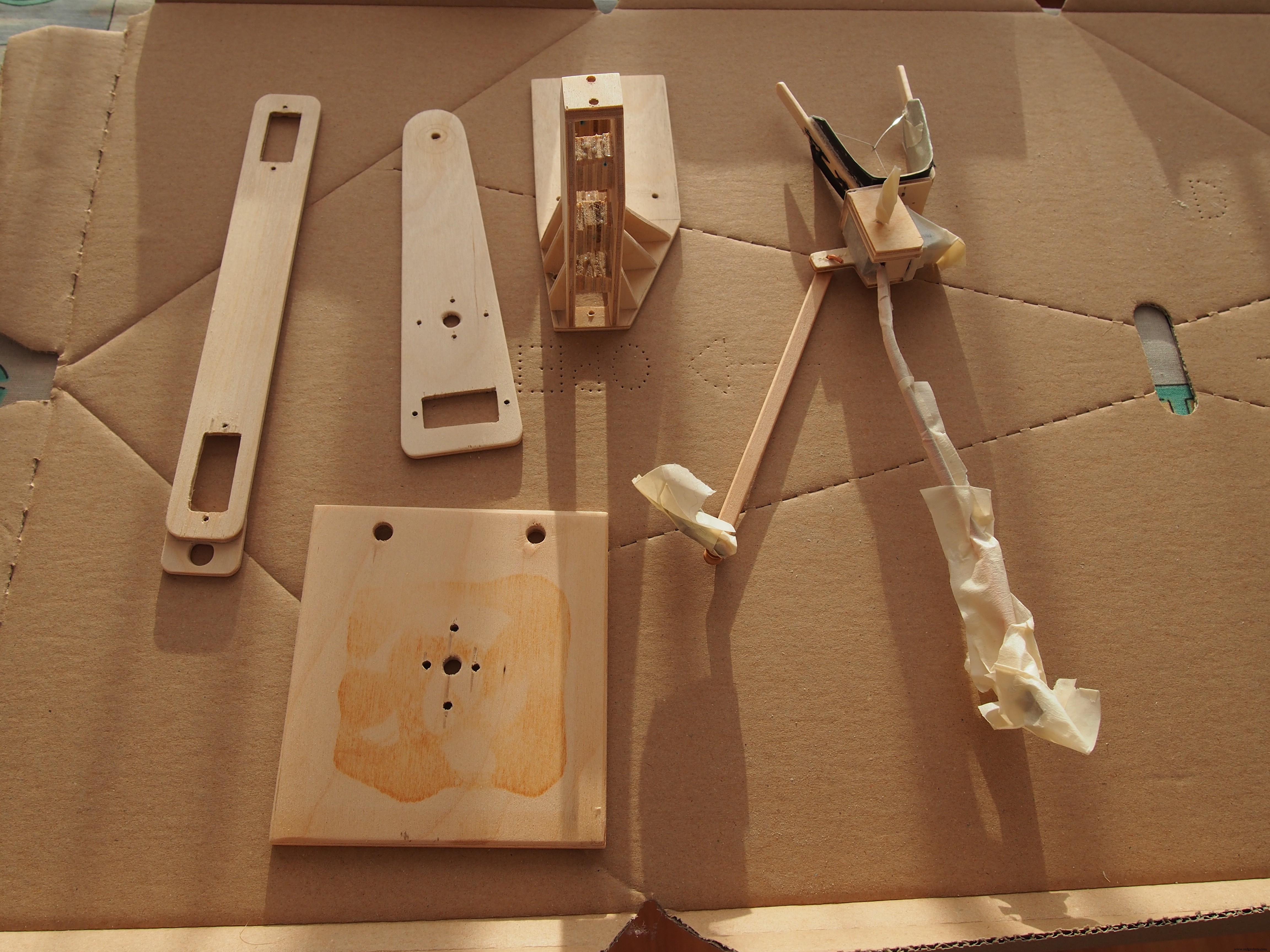
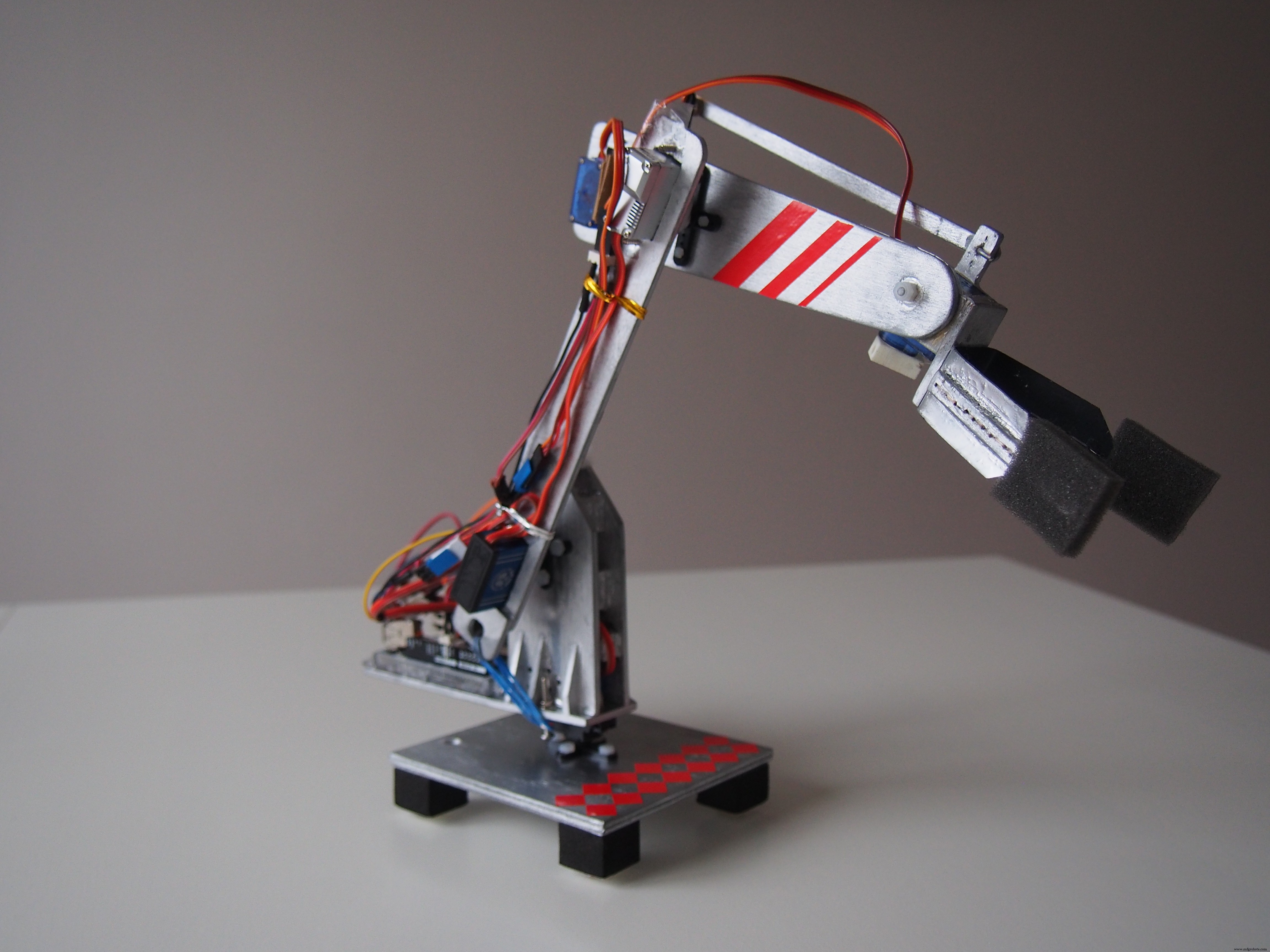
Начните с обрезки рук, как вы видите на фото 1. Здесь вы можете проявить творческий подход, здесь нет фиксированного дизайна, вы можете придумать свой собственный дизайн. Затем соберите захват, используя одну палочку для смешивания, разрезанную пополам, и пластиковый лист в качестве пружинного возврата. С помощью проводов, подключенных к внутренней стороне, вы можете закрывать и открывать захват. Для моего робота я использовал один винт M3, чтобы повернуть захват. Поворот захвата осуществляется сервоприводом, расположенным с другой стороны рычага, чтобы получить баланс веса. Мощность передается через другую микшерную ручку (см. Фото 2, верхняя часть робота).
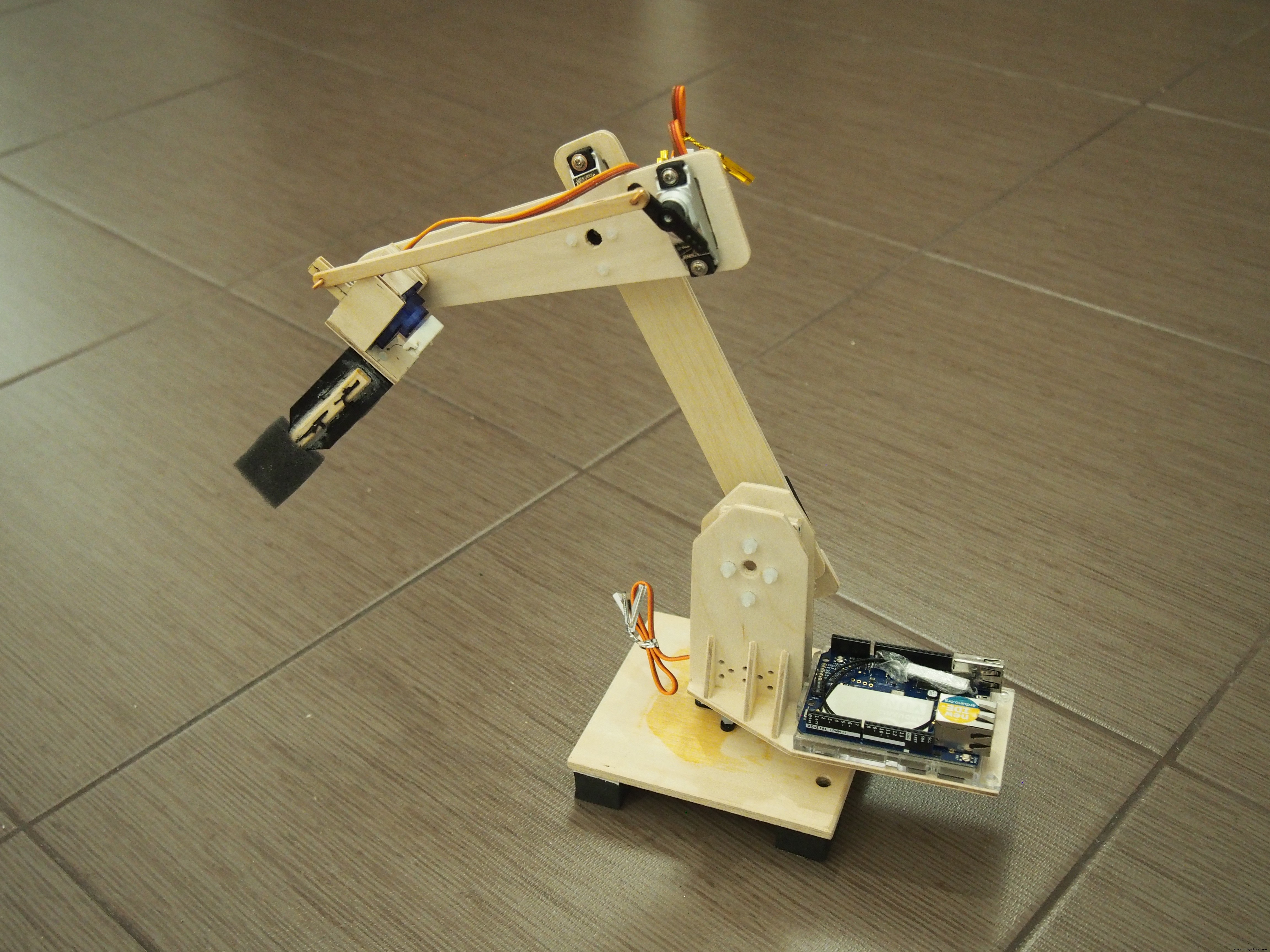
Затем постройте основание и пластину, которая удерживает базовый сервопривод и плату Arduino Yun (или другую плату). Сложите все вместе, и у вас должно получиться что-то вроде фото 2.
Если вы хотите, чтобы дизайн выглядел лучше, отшлифуйте деревянные детали и покрасьте их (как на фото 3) в нужный цвет. Для своего робота я выбрал серебристый цвет (имитирующий металл) с красными полосами. Окончательный результат показан на фото 4.

Программное обеспечение
Что касается программного обеспечения, я начал с создания интерфейса в Blynk. Если вы раньше не использовали Blynk, посетите их веб-сайт, чтобы узнать, как это сделать. Должно быть очень просто и понятно.
Примечание. Если у вас нет платы, которая может подключаться к Интернету, не волнуйтесь, вы все равно можете использовать Blynk с обычной платой, например, Arduino Uno, через порт USB. Об этом читайте здесь.
Затем перейдем к Arduino IDE и напишем код. Для вашего удобства я прикрепил код, так что вы можете просто использовать его :) Для запуска вам необходимо сделать следующее:
- Настройте плату Arduino Yun.
- Установите библиотеку Blynk в свою среду разработки Arduino, выбрав Sketch> Включить библиотеку> Управление библиотеками, найдите Blynk и установите его.
- Добавьте библиотеку SimpleTimer в папку с именем SimpleTimer в папку библиотеки Arduino, обычно Arduino \ libraries \
- Добавьте написанную мной библиотеку MotionGenerator в папку с именем MotionGenerator в папку библиотеки Arduino.
- Скомпилируйте и загрузите RobotArm_instructables.ino (Примечание:не забудьте обновить свой токен Blynk)
Примечание. Библиотека MotionGenerator - это аналитическое решение, которое обеспечит плавные приятные переходы от одной точки к другой. Это позволяет ограничивать максимальную скорость и ускорение.

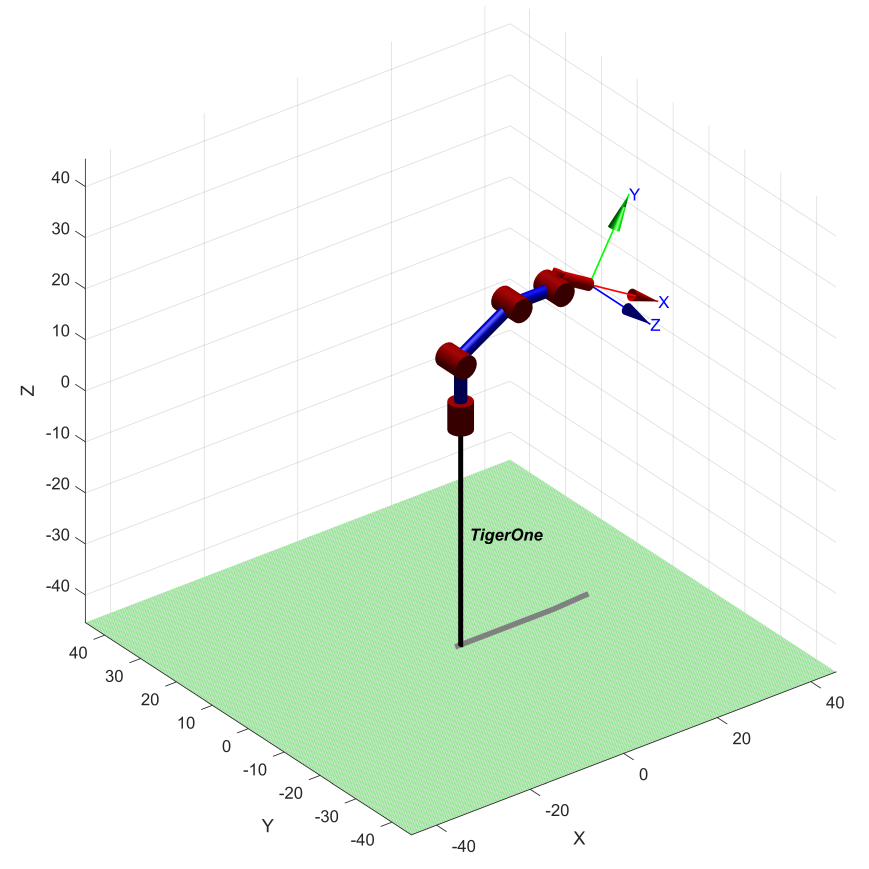
Необязательно (прямая кинематика, см. фото 3 выше): Для этого вам понадобится Matlab и Robotics Toolbox. Если у вас есть все это, убедитесь, что ваш робот подключен к Blynk и подключен к USB-порту вашего компьютера. Matlab будет собирать информацию от Arduino через последовательную связь. Поэтому не забудьте указать правильный COM-порт в MainScrip.m. Наконец, просто запустите MainScrip.m.
Примечание:кинематика робота предназначена для моего собственного робота. Для вашего робота размеры могут быть другими (вы можете изменить их в robotKinematicsFcn.m).
Код
- Исходные файлы
Исходные файлы C / C ++
Zip-архив, содержащий файлы исходного кода.Без предварительного просмотра (только загрузка).
Схема
Производственный процесс
- Makerarm:супер-крутая роботизированная рука для производителей
- Плата Arduino предназначена для промышленного Интернета вещей
- Роботизированная рука:как это сделано?
- Монитор сердечного ритма с использованием Интернета вещей
- Использование Интернета вещей для удаленного управления манипулятором
- Роботизированная рука, напечатанная на 3D-принтере Arduino
- Роботизированная рука, управляемая нунчук (с Arduino)
- Простая и умная роботизированная рука с использованием Arduino
- Бассейн Azure IoT
- Промышленный роботизированный манипулятор — производственный бум