


Роботизированная рука, напечатанная на 3D-принтере Arduino
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 |
Необходимые инструменты и машины
 |
| |||
 |
|
Приложения и онлайн-сервисы
 |
|
Об этом проекте
В этом проекте используется 4шт. дешевые серводвигатели SSG 90 с питанием от платы Arduino. Вы можете загрузить файлы .stl для 3D-печати по приведенной ниже ссылке или прямо на веб-сайте Thingiverse
https://www.thingiverse.com/thing:1015238
где вы можете найти более подробную инструкцию по изготовлению этой роботизированной руки.
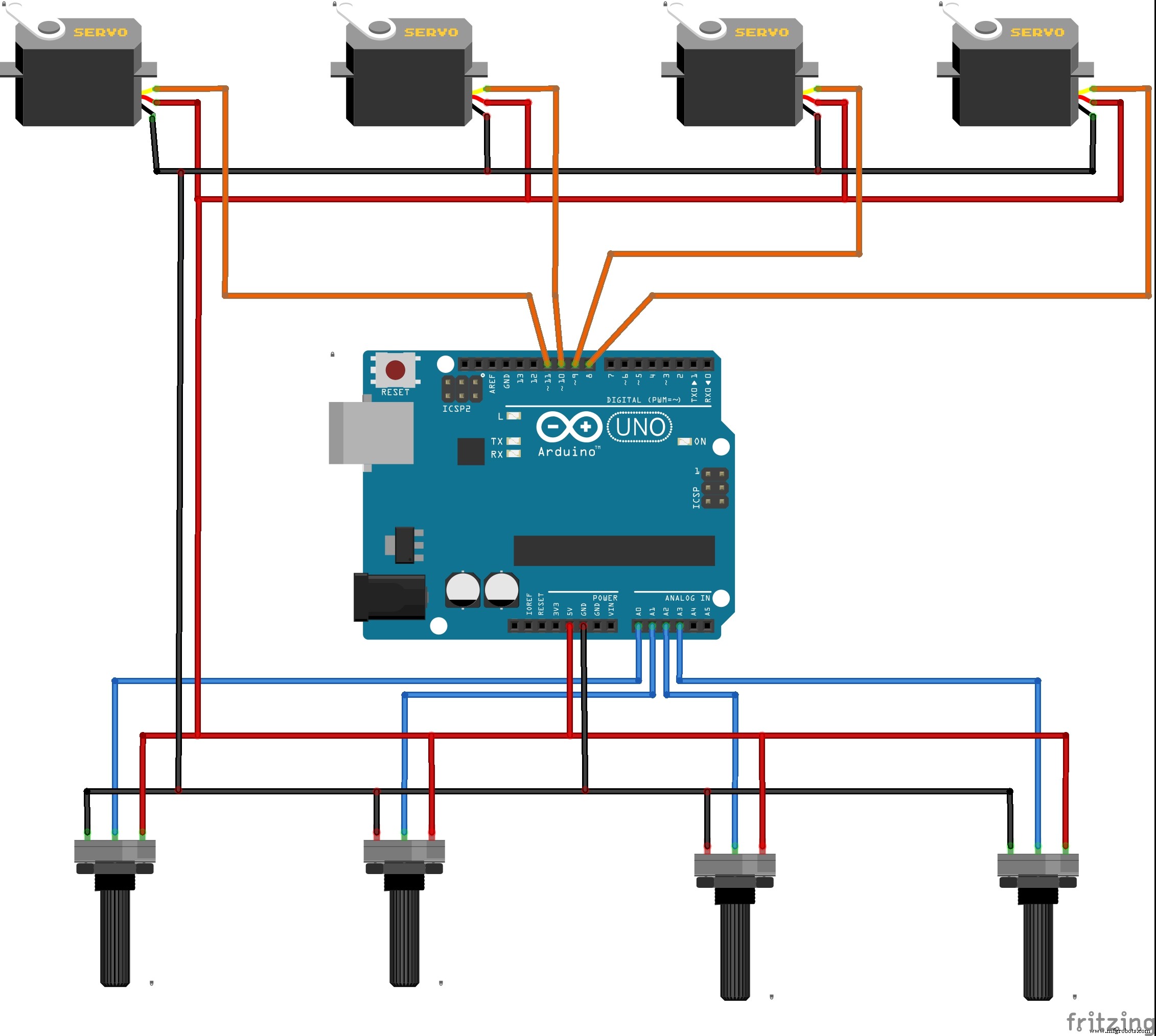
Как упоминалось ранее, серводвигатели управляются от платы Arduino. Для этой цели я также написал простой код, чтобы каждый сервопривод управлялся подходящим потенциометром. После небольшого упражнения работа с потенциометрами становится очень простой и интересной, как это видно на видео.
В будущем я попытаюсь расширить код, добавив в него возможность захвата и автоматического выполнения определенных движений серводвигателей, что позволило бы получить полноценного промышленного робота.
Схему можно увидеть на картинке ниже.
Код
- код
код Arduino
#includeServo myservo; // создаем сервообъект для управления servoServo myservo1; Servo myservo2; Servo myservo3; int potpin =0; // аналоговый вывод, используемый для подключения потенциометра int potpin1 =1; int potpin2 =2; int potpin3 =3; int val; // переменная для чтения значения из аналогового pinint val1; int val2; int val3; void setup () {myservo.attach (8); // подключает сервопривод на выводе 8 к сервообъекту myservo.attach (9); myservo.attach (10); myservo.attach (11);} цикл void () {val =analogRead (potpin); // считывает значение потенциометра (значение от 0 до 1023) val =map (val, 0, 1023, 0, 180); // масштабируем его для использования с сервоприводом (значение от 0 до 180) myservo.write (val); // устанавливает положение сервопривода в соответствии с масштабированным значением delay (15); // ждет, пока сервопривод доберется туда val1 =analogRead (potpin1); значение1 =карта (значение1, 0, 1023, 0, 180); myservo1.write (значение1); задержка (15); val2 =аналоговое чтение (potpin2); значение2 =карта (значение2, 0, 1023, 0, 180); myservo2.write (значение2); задержка (15); val3 =analogRead (potpin3); значение2 =карта (значение3, 0, 1023, 0, 180); myservo3.write (val3); задержка (15); }
Изготовленные на заказ детали и корпуса
eezybotarm_uVD6bjbxQi.zipСхема
Производственный процесс
- Цифровые игральные кости Arduino
- Использование Интернета вещей для удаленного управления манипулятором
- Железный человек
- Найди меня
- Управление увлажнителем Arduino
- Роботизированная рука, управляемая нунчук (с Arduino)
- Простая и умная роботизированная рука с использованием Arduino
- NeoMatrix Arduino Pong
- Джойстик Arduino
- FM-радиоприемник Arduino TEA5767