


Роботизированная рука из переработанных материалов
Компоненты и расходные материалы
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 |
Приложения и онлайн-сервисы
 |
| |||
 |
|
Об этом проекте
Роботы-манипуляторы - один из самых популярных проектов DIY, который вы найдете в Интернете. Когда мы сели за разработку нашей версии манипулятора Arduino, мы решили принять вызов и создать его из переработанных материалов. То, как мы это видим, как производитель, также означает нестандартное мышление и вопрос о том, как использовать различные доступные вам материалы, не производя дополнительных отходов. Из деревянных обрезков и пластиковых бутылок мы собрали корпус робота-манипулятора. Мы сделали термоусадку из пластиковых бутылок с помощью изящной техники, которую мы узнали в Интернете, и использовали картофель (!) В качестве груза, чтобы робот не опрокинулся.
Этот проект доставил нам массу удовольствия, поскольку он напомнил нам, почему мы любим создавать так много.
Вы также можете найти полное руководство для этого и других проектов в нашем блоге.
Примечание. В video вы увидите более раннюю версию circuito.io, поэтому лучше следовать инструкциям в руководстве.
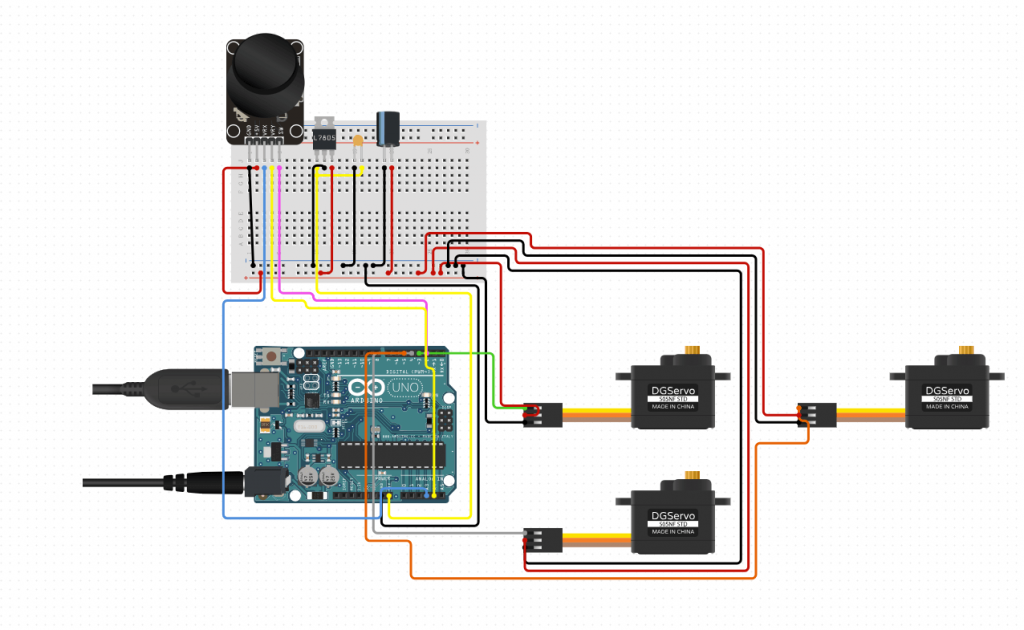
Электроника
Основные компоненты
- Arduino UNO
- 3 сервопривода SparkFun (стандартный Metal Gear)
- 2-осевой модуль джойстика PS2
Вторичные компоненты
- Стабилизатор напряжения 5 В
- Электролитический конденсатор - 1 мкФ / 50 В
- Керамический конденсатор 100 нФ
- Радиатор ТО-220
- Доска для хлеба - половинного размера
- Комплект соединительных проводов - M / M
Щелкните здесь, чтобы увидеть схему подключения
Код руки робота
- Сначала вам нужно загрузить код схемы . из вкладки кода на сайте circuito.io.
- Следуйте инструкциям, чтобы проверить правильность подключения.
- Замените тестовый код firmware.ino из circuito.io кодом firmware.ino из репозитория. Остальные библиотеки оставьте как есть.
- Не забудьте оставить «Включить библиотеки» и «Определения контактов». Убедитесь, что определения контактов совпадают.
Материалы

- Мы использовали деревянные обрезки толщиной 1 см, которые были у нас в мастерской. В некоторых местах мы склеили 2 части вместе для дополнительной прочности и надежности. Вы можете проверить, есть ли поблизости другие материалы, но убедитесь, что они прочные, но гибкие.
- Для соединения деталей мы сделали термоусадочные изделия из пластиковых бутылок. Это потрясающая техника, которую вы можете сделать из пластиковых бутылок, которые есть у вас дома. Поиграйте и проверьте их немного, и вы удивитесь, насколько они сильны.
- Рычаг движется по трем осям, поэтому мы будем использовать 3 серводвигателя. Вот хорошая статья, в которой объясняется, как выбрать серводвигатель для вашего проекта. Мы собираемся использовать Sparkfun Servo - обычную металлическую шестеренку.
Сборка
База
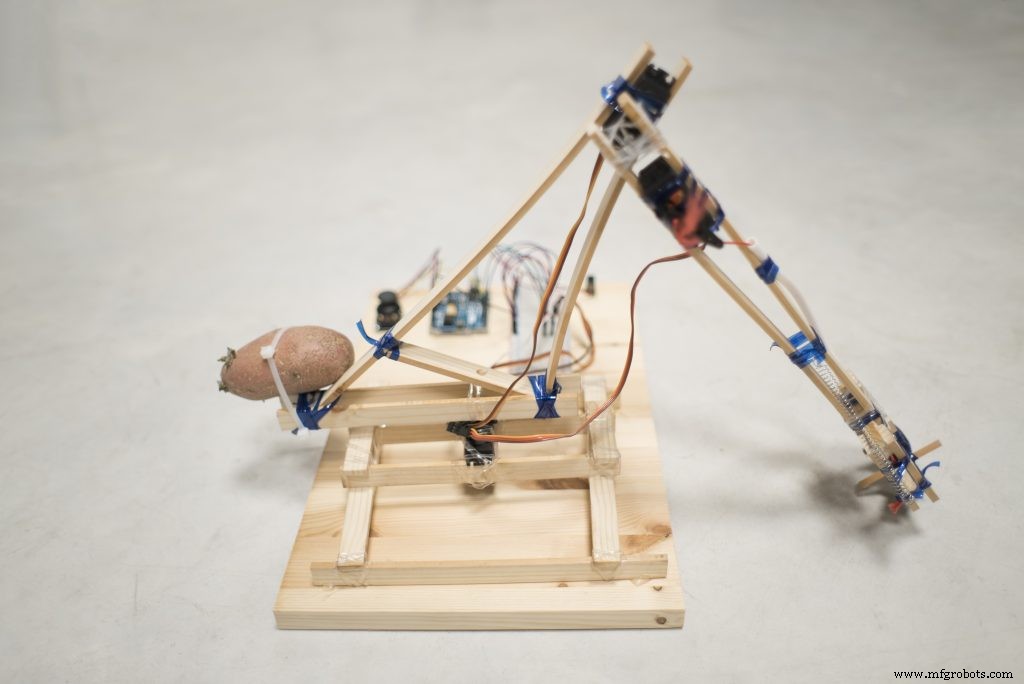
Начните сборку с твердой основы, чтобы рука не опрокидывалась. В то же время нам также необходимо понять, как лучше всего связать и связать куски дерева вместе, чтобы основание было прочным.
На изображении ниже вы можете увидеть, как мы использовали термоусадочную пленку и картофель (!) В качестве основы в качестве веса. Только не забывайте время от времени заменять :)
Баланс
Размещение второго сервопривода было более сложной задачей, и мы чувствуем, что эта область все еще требует некоторого внимания. После создания прототипа мы поняли, что недостаточно продумали балансировку плеча. Следовательно, серводвигатель потребляет большой ток, и это можно преодолеть, используя противовес на противоположной стороне плеча.
Захват
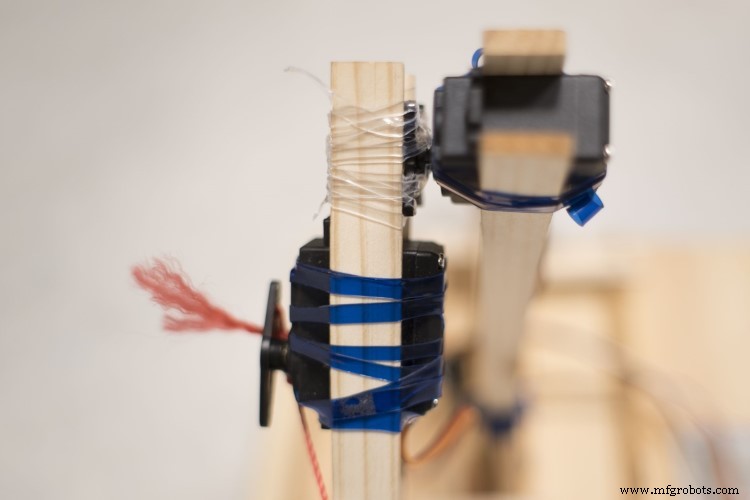
Мы рассматривали разные типы захватов и не совсем понимали, что будем здесь делать. В конце концов, мы решили сделать одну сторону захвата статичной, чтобы она имела надежный захват. Как вы можете видеть на изображении ниже, для движущейся части мы сделали соединение, которое управляется сервоприводом, и добавили пружину для закрытия и открытия.
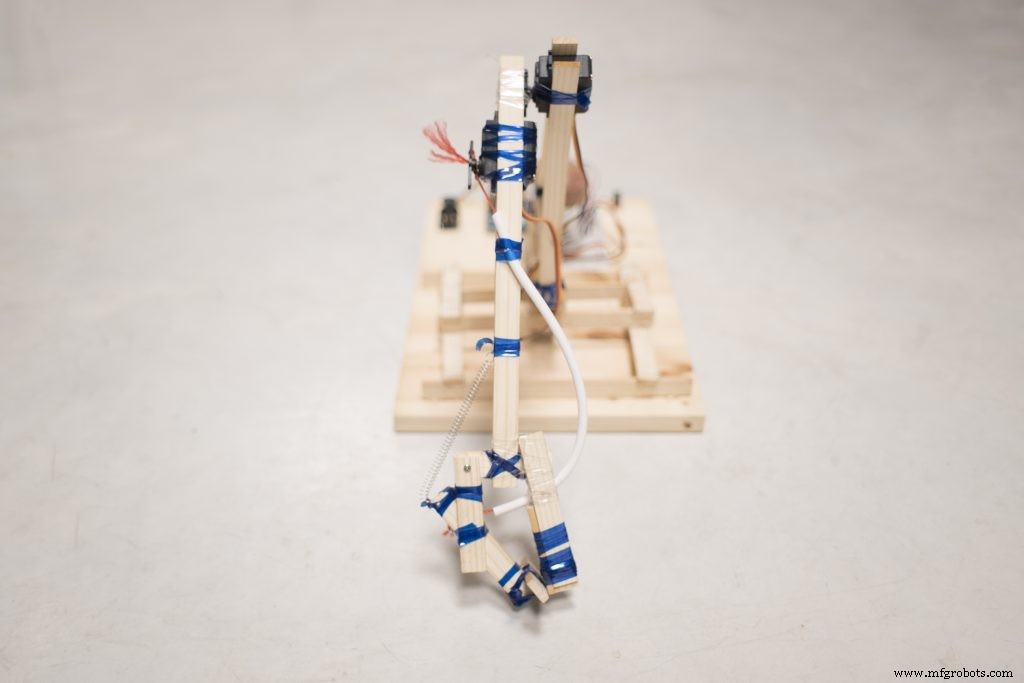
В конце концов, мы поместили веревку в эластичную трубку, чтобы соединить серводвигатель и захват, тот же механизм, который вы можете найти в велосипедных тормозах.
Вот и все! Возможно, вам потребуется внести незначительные поправки и изменения в код и механику в соответствии с используемыми материалами и электроникой. Если у вас есть идеи или комментарии, мы будем рады их услышать! Поделитесь ими с нами на нашем форуме или в комментариях ниже
Код
Код роботизированной руки
1. Замените тестовый код firmware.ino из circuito.io на код firmware.ino из этого репозитория2. Остальные библиотеки оставьте как есть 3. Не забудьте оставить «Включить библиотеки» и «Определения контактов» 4. Убедитесь, что определения контактов совпадают. Https://github.com/Circuito-io/Robotic-ArmПроизводственный процесс
- Робот-рука с открытым исходным кодом, напечатанная на 3D-принтере от Haddington Dynamics
- Робот SCARA с двумя руками
- Различия между роботом-манипулятором и роботизированной рукой
- Рука робота MeArm - Ваш робот - V1.0
- Роботизированная рука, напечатанная на 3D-принтере Arduino
- Роботизированная рука, управляемая нунчук (с Arduino)
- Рука робота, управляемая через Ethernet
- Автоматизированная роботизированная рука для пайки
- GXO запускает пилотный роботизированный манипулятор для логистики модной электронной коммерции
- Промышленный роботизированный манипулятор — производственный бум