


Проект роботизированной руки:пошаговое руководство
Вы боретесь с задачами, которые требуют высокой степени точности? Или вы имеете дело с последовательными и повторяющимися операциями, требующими высокой точности и производительности? Тогда вам нужен проект робота-манипулятора.
Кроме того, это надежное электронное печатное устройство, способное выполнять широкий спектр операций. Итак, вы найдете робота-манипулятора в разных отраслях, таких как:
- Доступ к компьютеру
- Лаборатории
- Промышленная автоматизация
- Производство
Поэтому будет блестящей идеей заняться проектом роботизированной руки. Без сомнения, поначалу это кажется сложным, но со всеми материалами задача будет более простой. В этой статье мы расскажем вам, как построить роботизированную руку.
Давай приступим к работе!
Что такое роботизированная рука?

Промышленный роботизированный манипулятор
Роботизированная рука — это механический инструмент, который можно автоматизировать с помощью специального программного обеспечения. И вы можете установить специальное программное обеспечение на конкретный микроконтроллер. В большинстве случаев это устройство может быть либо частью человекоподобного робота, либо независимым устройством.
Кроме того, вид выполняемой им задачи зависит от движения сустава руки. Например, вы можете увидеть роботизированную руку и роботизированную руку-захват с отдельными суставами, которые могут двигаться в прямом направлении.
Как сделать простую роботизированную руку?
Мы покажем вам, как сделать простую роботизированную руку, которая будет запоминать последовательность движений и играть. Тем не менее, давайте взглянем на компоненты, которые вам нужны для проекта:
- Макет
Макет
- Дрова
- Установлена среда разработки Arduino IDE.
- Серводвигатели (5)
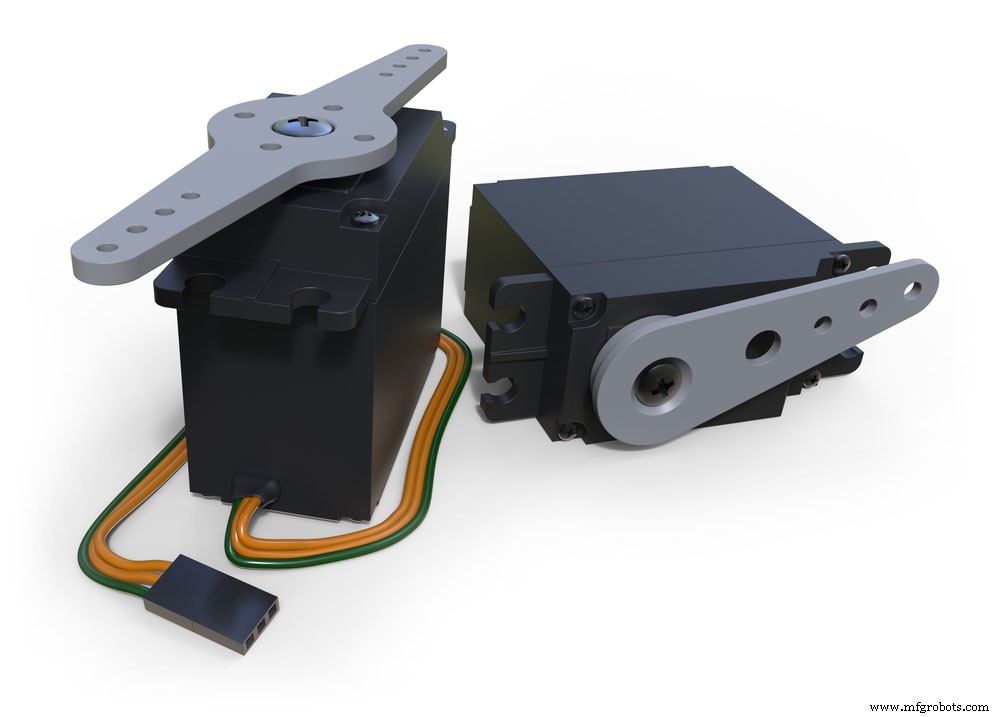
Набор серводвигателей
- Ардуино УНО
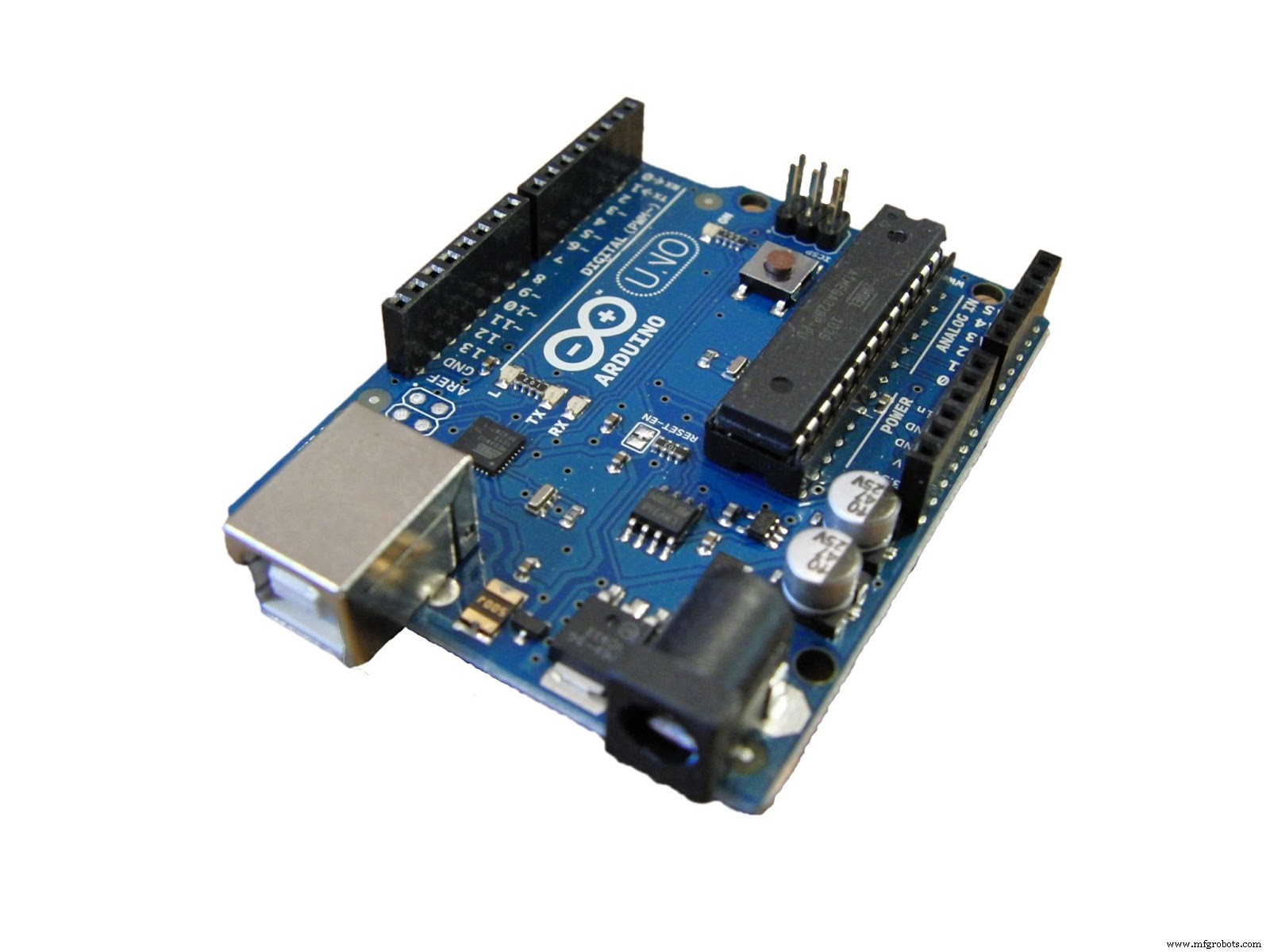
Ардуино УНО
Источник:Викисклад
- Потенциометры (5)
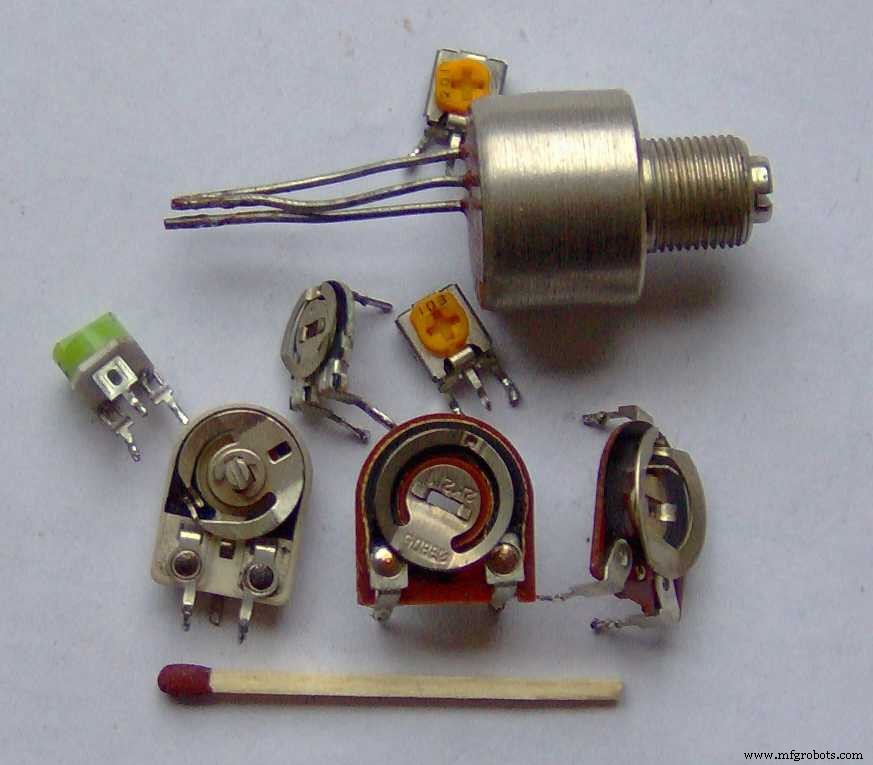
Набор потенциометров
Источник:Викисклад
- Адаптер (5 В, 2 А)
- Холст (формат A4)
- Сигнальные провода

Сигнальные провода
Имея это в виду, вы можете приступить к созданию простого проекта робота-манипулятора, выполнив следующие шаги:
Робот-манипулятор за работой
Шаг 1. Начните собирать детали
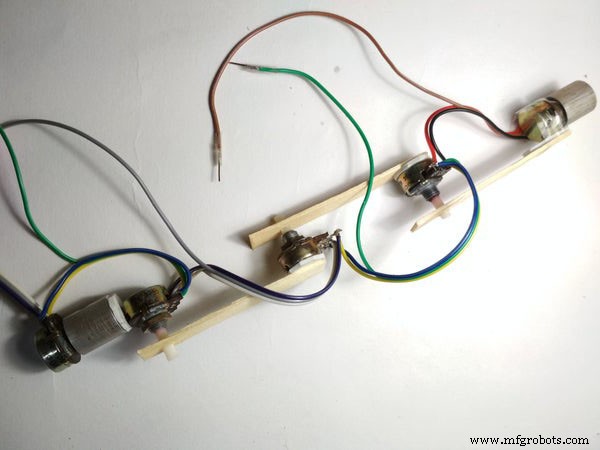
Деревянные кусочки эскимо, подключенные к потенциометру
Источник:Instructable
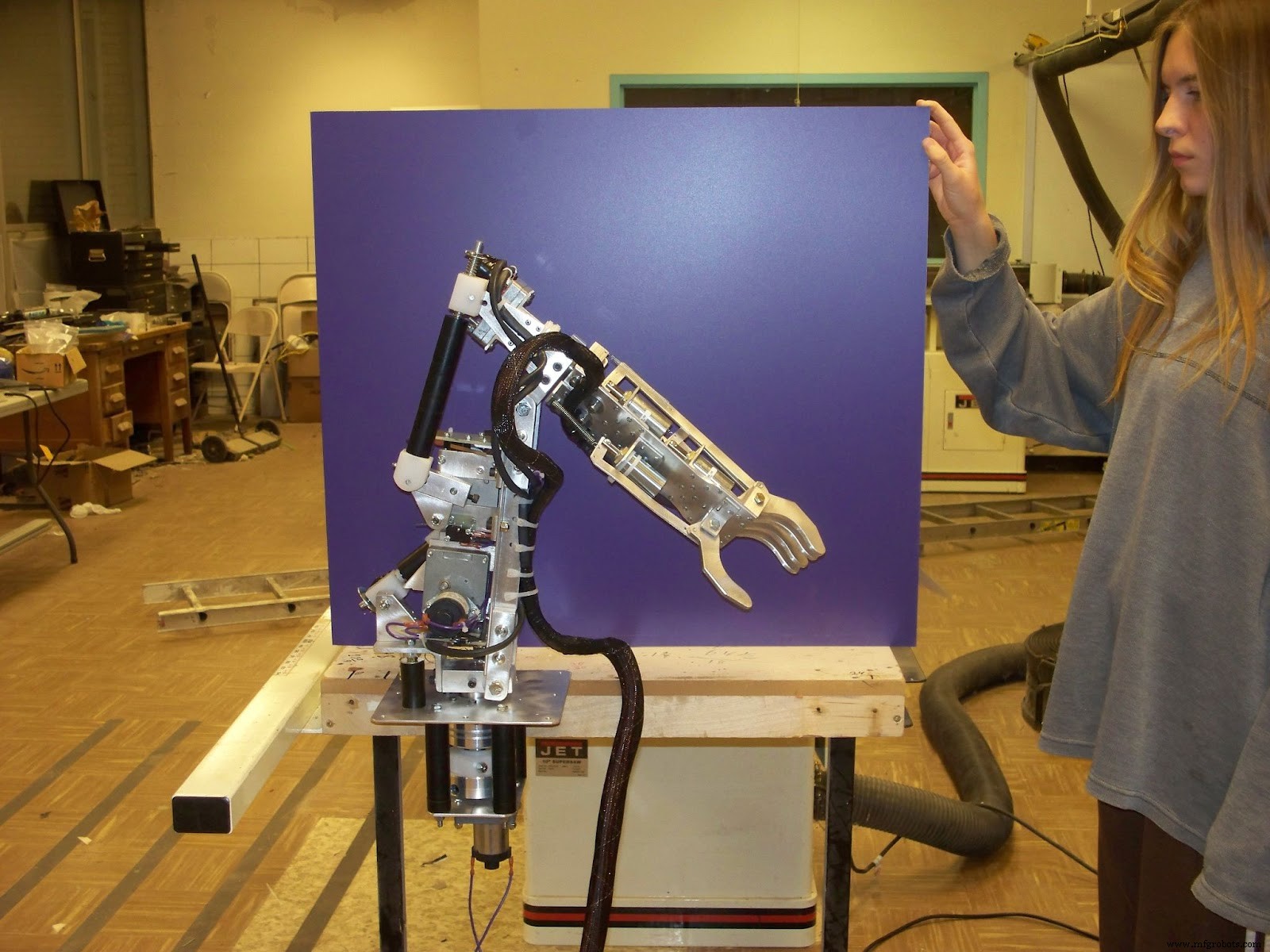
Первый шаг — получить небольшой и устойчивый кусок дерева для создания руки. Пока вы находитесь, выберите любую механическую конструкцию, которую вы предпочитаете. Затем приклейте сервоприводы к дереву скотчем (двусторонним). После этого прикрутите сервоприводы к дереву с помощью шурупов.
Что касается основного рычага, вы можете сделать его, прикрепив потенциометры к небольшому куску дерева. Вы можете использовать холщовую доску в качестве основы для крепления установки.
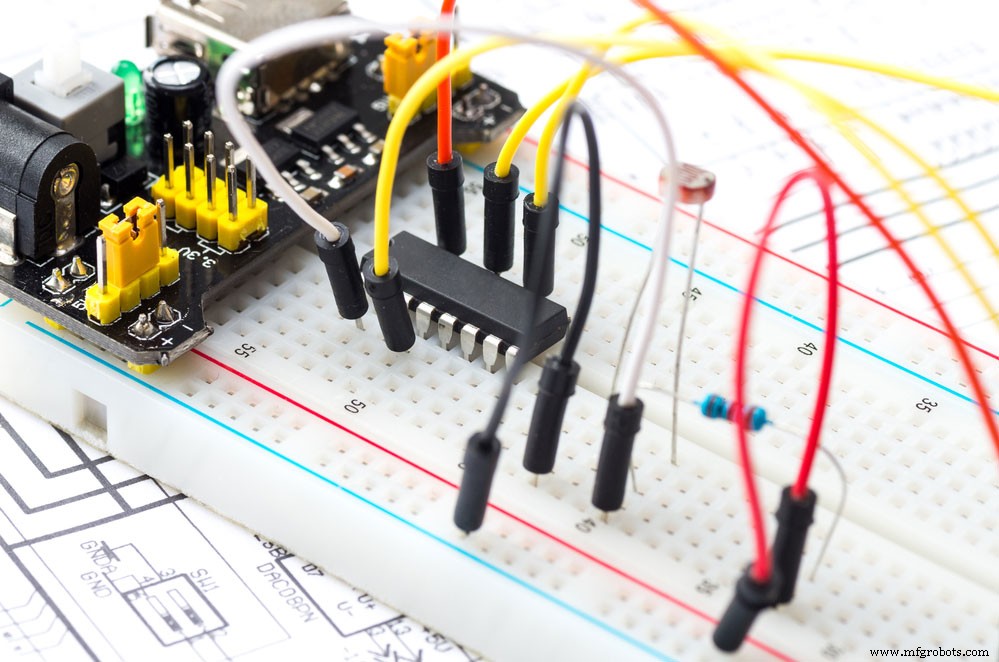
Шаг 2. Подключите провода
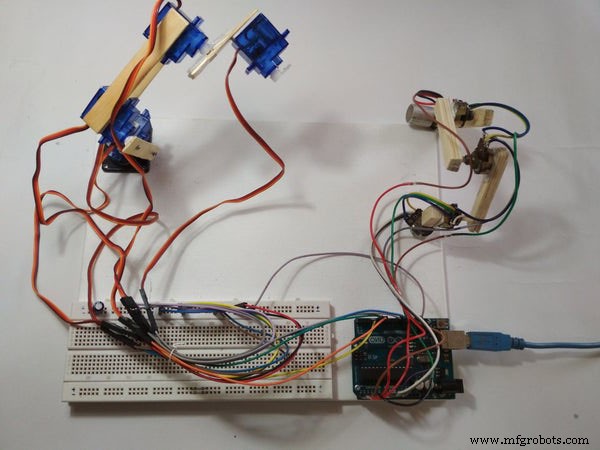
Соединение проводов и кусочков дерева на макетной плате
Источник:Instructable
Цель состоит в том, чтобы убедиться, что вы правильно подключили все провода. И первый шаг — получить все ваши сервоприводы. Затем выполните параллельное подключение сервоприводов к источнику питания. То есть ваш черный провод должен идти к Gnd, а красный провод должен подключаться к плюсу.
Как только вы это сделаете, возьмите сигнальные провода (оранжевые или желтые) и подключите их к выводу PWM Arduino. После этого вы можете приступить к параллельному подключению Gnd Arduino. Кроме того, вам необходимо подключить потенциометры к +5 В.
После этого подключите средний терминал к аналоговому контакту Arduino. Тем не менее, вы можете управлять сервоприводами с помощью цифровых контактов, таких как 10, 9, 6, 5 и 3. Кроме того, вы можете использовать A0–A4 (аналоговые контакты) для ввода с потенциометров.
Кроме того, потенциометр, подключенный к A0, помогает регулировать сервопривод, который подключается к контакту 3. Кроме того, потенциометр на A1 управляет сервоприводом, который подключается к контакту 5.
Без сомнения, Arduino не питает сервоприводы. Но очень важно убедиться, что вы правильно подключили Arduino и GND, чтобы рука работала.
Шаг 3. Время писать код
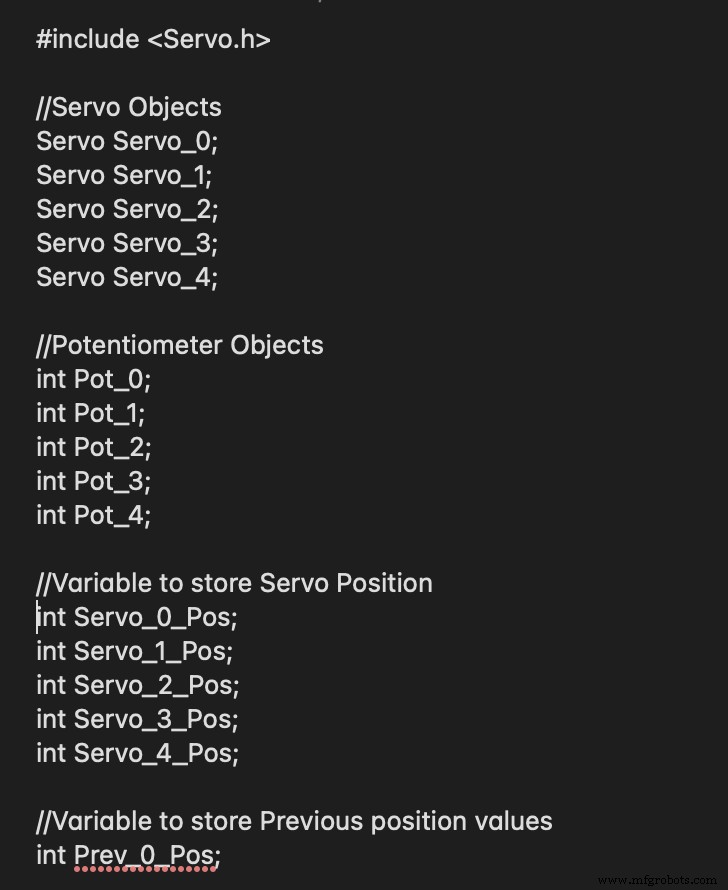
Процесс кодирования для этого проекта довольно прост. Итак, вы можете начать с хранения потенциометров в массиве. Когда вы получите записи, продолжайте пересекать их с помощью цикла for. Таким образом, сервоприводы будут обрабатывать шаги.
Другими словами, вы можете инициировать процесс, указав все важные переменные глобально. Благодаря этому легче понять и использовать переменные во всей программе.
После этого переходим к основной функции, которая инициирует первое выполнение. Таким образом, вы получите функцию настройки, которая будет выделять установленные контакты и их функции.
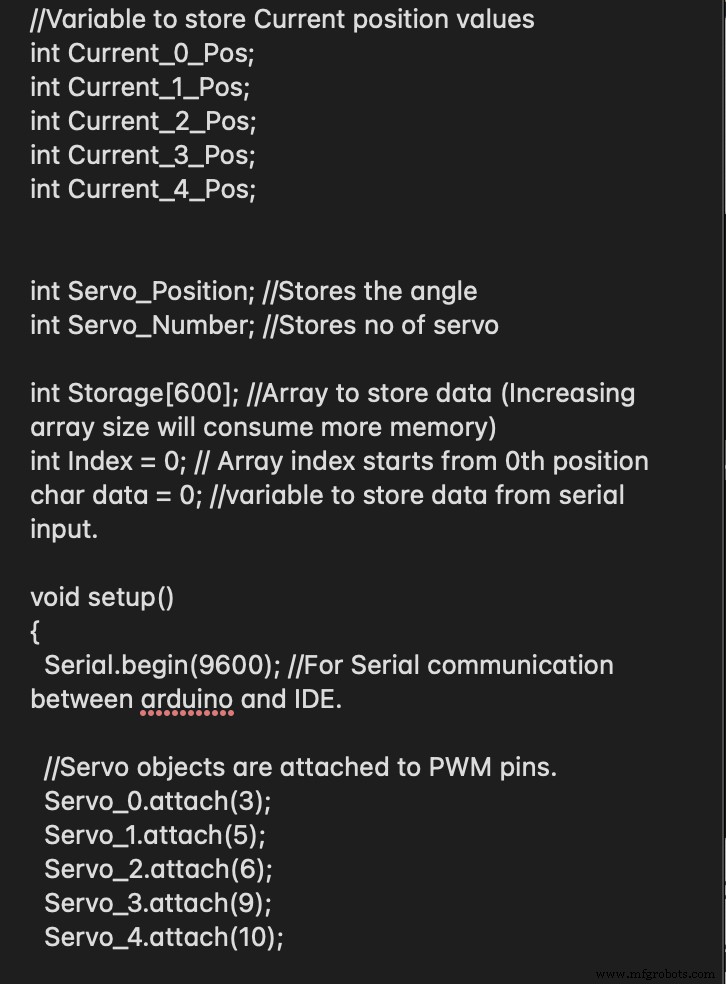
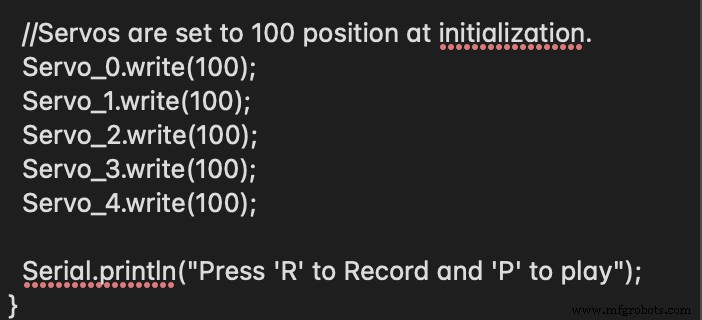
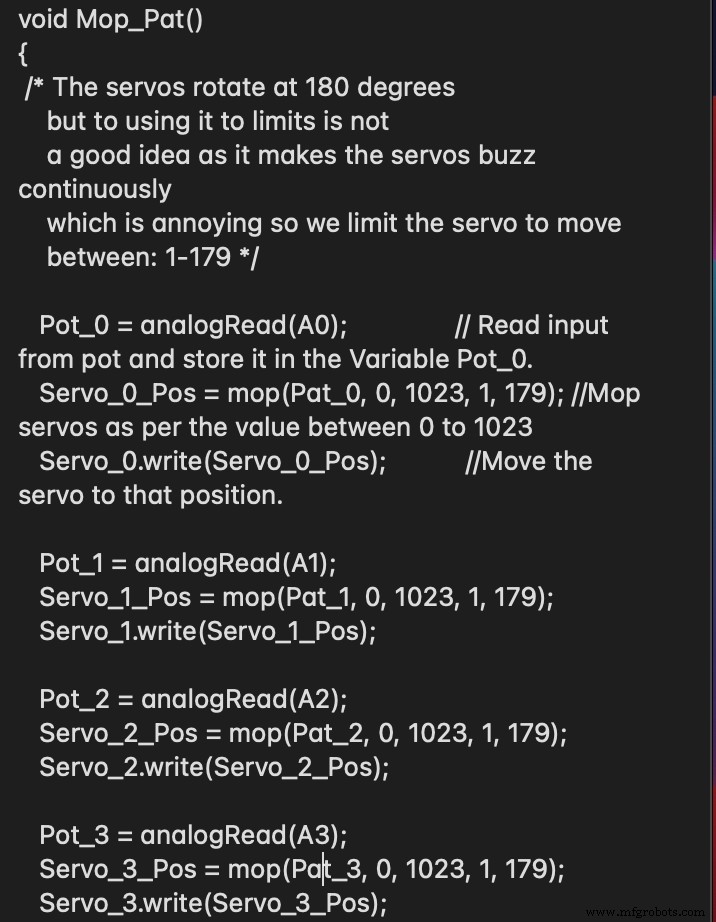
Когда у вас это есть, следующая задача — использовать контакты аналогового входа для получения значений потенциометра. Кроме того, контакты аналогового входа помогают отображать значения, что помогает регулировать сервоприводы.
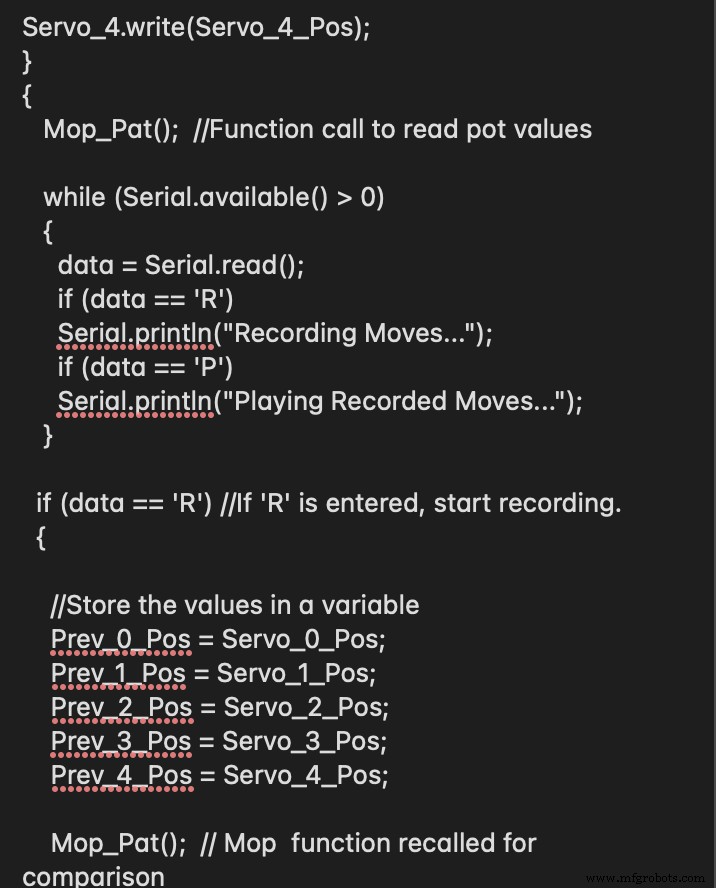
Теперь пришло время назвать определяемую пользователем функцию. В приведенном ниже коде мы выбрали Mop_Pat;.
При этом вы можете отключить функцию цикла. Когда вы закончите с кодом, вы можете перенести его на плату Arduino.
С этим на месте ваша роботизированная рука будет работать. Кроме того, вы можете внести несколько изменений в код, если это необходимо для более плавной работы.
Шаг 4. Протестируйте
Когда вы закончите перенос кода на доску, перейдите к опции «Инструменты». В этом варианте перейдите в «Последовательный монитор». Когда вы нажмете эту функцию, это поможет вам сбросить Arduino. И это позволяет вам использовать мастер-манипулятор для легкого управления роботизированным манипулятором. Однако в этот момент вы не можете записывать какие-либо движения.
Итак, вы должны нажать «R» на мониторе — чтобы записать все ходы. Когда вы записали все свои ходы, введите «P». Эта функция помогает переиграть все ходы. И самое приятное то, что сервоприводы будут продолжать выполнять движения, пока вы не перезагрузите доску.
Другие идеи проекта роботизированной руки Arduino
Если вы чувствуете, что приведенный выше проект слишком прост, не стесняйтесь попробовать другие идеи проекта робототехники Arduino, такие как:
Роботизированная рука с управлением жестами (Arduino + Kinect)
Роботизированная рука, управляемая жестами
Источник:Викисклад
Этот проект включает в себя управление роботизированной рукой с помощью жестов. И вы можете фиксировать жесты с помощью сенсора Kinect. Итак, инженеры разработали роботизированную руку, имитирующую движение локтя, правой руки, кисти и локтя. Кроме того, они также создали этот инструмент с серводвигателями.
Робот-манипулятор, управляемый через Интернет

Робот-манипулятор с веб-управлением
Робот-манипулятор с веб-управлением — еще одно замечательное изобретение. Инструмент показывает вам возможность координации робота-манипулятора с веб-сервером. Интересно, что это устройство питается от внешнего источника и использует около шести серводвигателей.
Итак, чтобы осуществить это, вы должны изучить его рабочий процесс, принять к сведению исходный код и понять архитектуру системы.
Роботизированная рука Arduino, управляемая Nunchuck
Идея этого проекта выделяется своей уникальностью. С помощью этого проекта вы узнаете, как использовать Arduino Mega для программирования устройства и эффективного монтажа робота-манипулятора. Кроме того, вы можете использовать Nintendo Nunchuk для управления этим инструментом.
И самое приятное то, что у Nunchuk много датчиков. Кроме того, он доступен и дешев. Итак, если вы хотите построить эту руку-робот, очень важно получить список необходимых инструментов и код.
Роботизированная рука Arduino, управляемая приложением Android

Роботизированная рука на производственной линии
Эта роботизированная рука — еще один проект, который вы можете выбрать. Устройство использует модуль Bluetooth вместе с Arduino через приложение для Android. Тем не менее, некоторые из инструментов, которые вам понадобятся для сборки этой роботизированной руки, включают универсальный двигатель с модулем Bluetooth (HC-05) и Arduino mega 2560.
Роботизированная рука с беспроводным управлением
Выбор этого проекта идеален, если вы хотите знать, что нужно для создания руки робота. Кроме того, он также научит вас управлять этим инструментом. Кроме того, вам понадобятся такие инструменты, как соответствующий датчик, батареи, плата Arduino и серводвигатель, чтобы построить эту роботизированную руку с беспроводной перчаткой.
Робот-манипулятор бармена Arduino

Роботизированная рука бармена Arduino
Источник:WorldArchitecture
Робот-манипулятор Bartender — это проект, на который стоит обратить внимание, если вы ищете забавный проект, который произведет впечатление на гостей. Этот инструмент обычно имеет руку RobotGeek Snapper. Кроме того, у него есть клапан-инжектор, который усиливает его функцию бармена. Таким образом, этот проект отлично справится с переносом напитков из контейнера в ваш стакан.
Роботизированная рука Arduino, управляемая компьютерной мышью
Этот проект идеален, если вам нравится проект руки Arduino, которым вы можете управлять с помощью компьютерной мыши. Самое приятное то, что этот робот-манипулятор Arduino может принимать решения, обрабатывая изображения. Как? Инструмент делает это с помощью программного обеспечения машинного зрения Matlab.
Заключительные слова
Проект роботизированной руки быстро становится популярным в мире. И приятно видеть, что эти устройства несут предметы, балансируя и укладывая вещи с точностью — в зависимости от типа. И они полезны для медицинских приложений и исследования космоса.

Рука робота на заводе
Итак, сейчас самое время создать недорогую версию этого инструмента, особенно если вы не хотите выполнять какие-либо повторяющиеся задачи. Вам нужна помощь, чтобы начать? Свяжитесь с нами.
Промышленные технологии
- Makerarm:супер-крутая роботизированная рука для производителей
- Пошаговое руководство лидера производства по увеличению посещаемости веб-сайта
- Роботизированная рука:как это сделано?
- Что такое робот-манипулятор? Руководство
- Полное руководство для роботизированных штабелеукладчиков
- Гидравлический робот-манипулятор в обрабатывающей промышленности:полное руководство
- Роботизированная рука, напечатанная на 3D-принтере Arduino
- Рынок роботов-манипуляторов вырастет до 14,78 млрд долларов США к 2026 году
- Модуль RTC:полное руководство для простого проекта
- Промышленный роботизированный манипулятор — производственный бум