


Что такое робот-манипулятор? Руководство
Все части робота играют роль в его действиях и определяют виды задач, для которых он может быть использован. Поэтому глубокое понимание таких деталей было бы первым шагом к выбору подходящего промышленного робота . для ваших нужд. Хотя есть много частей, которые следует рассмотреть, возможно, было бы полезно начать с одной из ключевых; робот-манипулятор.
Робот - это машина, которая запрограммирована на предсказуемое автоматическое выполнение определенных задач. Для этого он должен обрабатывать объекты и либо перемещать их, либо воздействовать на них с помощью таких действий, как сварка или сверление. Именно эта обработка или процедуры, выполняемые с объектами, называются роботизированными манипуляциями. Таким образом, это определение дает нам контекст для определения роботов-манипуляторов.
Робот-манипулятор представляет собой конструкцию в виде руки, присоединенную к телу робота и используемую для выполнения задач. Робот без манипулятора был бы эквивалентом человека, выполняющего задачу со связанными за спиной руками, это просто невыполнимо. Фактически, именно по этой причине роботы-манипуляторы также известны как манипуляторы. Источник:Kawasaki
Роботы-манипуляторы состоят из серии соединений и звеньев, объединенных в их внутреннюю структуру. Снаружи рука робота-манипулятора только кажется, что он установлен на роботе. Однако ряд суставов и звеньев проходят дальше в тело робота, чтобы связать их. Это гарантирует, что робот и манипулятор работают вместе в скоординированных плавных движениях.
Связи - это жесткие компоненты, которые объединяют разные части робота. Хотя их жесткость обеспечивает прочную конструкцию, это затрудняет перемещение частей робота во время выполнения задач. В результате к звеньям добавляются шарниры для облегчения гибкости. Соединения - это подвижные компоненты, которые скользят друг относительно друга, чтобы облегчить линейное, вращательное или революционное движение частей робота. Они устроены и работают так же, как человеческие локти или колени. Источник:www. brainkart.com
Типы и количество суставов, которые имеет робот-манипулятор, определяют его степени свободы, форму его рабочего диапазона и способы его применения. Это, в свою очередь, определяет классификацию роботов. Для иллюстрации рассмотрим различные типы роботов и конструкции их роботов-манипуляторов.
Декартов робот - его манипуляторы связаны с помощью 3 призматических шарниров, перпендикулярных друг другу и обеспечивающих только линейные скользящие движения. В результате декартовы роботы классифицируются как 3-осевые роботы и имеют геометрическую рабочую область.
Полярный робот - рука и тело полярного робота соединены поворотным шарниром. Этот тип шарнира обеспечивает круговые движения, которые позволяют манипулятору полярного робота перемещаться в пределах 3 осей в системе полярной геометрии.
Цилиндрический робот - Цилиндрическая рука робота работает с использованием поворотного шарнира в основании и линейного шарнира, который позволяет ему перемещаться вдоль вертикальной оси. Расположение этих соединений позволяет манипулятору удлиняться и втягиваться, но его рабочий диапазон по-прежнему ограничен небольшой цилиндрической формой.
Робот SCARA - шарниры в роботе SCARA являются вращающимися и облегчают его движения по осям XY, оставаясь при этом жесткими по оси Z. Поскольку стыки представляют собой горизонтальную плоскость, роботы SCARA имеют широкие рабочие зоны полукруглой формы.
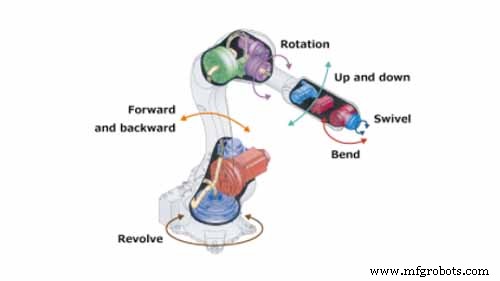
Шарнирно-сочлененный робот - шарнирно-сочлененный робот имеет самые гибкие манипуляторы среди всех других роботов. Рука робота-манипулятора связана с корпусом робота поворотным шарниром, а локоть и другие части руки связаны с помощью шарнирных соединений. Поворотные шарниры позволяют руке вращаться, наклоняться и рыскать, создавая таким образом 6-осевого робота.
Гибкость различных роботов-манипуляторов можно использовать для автоматизации процессов в различных отраслях промышленности. Примеры такого применения включают:
Роботизированная хирургия - в этом приложении шарнирный робот-манипулятор оснащен хирургическими инструментами в качестве конечных эффекторов. Хирург дистанционно управляет им для выполнения хирургических манипуляций.
Выберите и поместите - Это обычное промышленное приложение, в котором роботы-манипуляторы применяются для повторяющихся задач по подбору и размещению, таких как упаковка товаров.
Сборка печатной платы - в этом случае робот-манипулятор заменяет руки человека-рабочего для сборки микродеталей на печатной плате с высокой точностью и скоростью.
Можно с уверенностью сказать, что значение роботизированного манипулятора в робототехнике идет дальше, чем просто функция. Далее идет определение структуры и способов применения робота. Качественные манипуляторы от известного производителя манипуляторов поэтому будет достойным вложением средств для любого, кто занимается робототехникой. 
Содержание
Что такое манипуляции с роботами?

Из чего состоят роботы-манипуляторы?
Роботы-манипуляторы в разных роботах

Приложения роботов-манипуляторов
Заключение
Промышленный робот
- Какие отрасли и компании используют роботов
- Промышленные роботы - полное руководство
- Что такое роботизированная автоматизация процессов и ее преимущества
- Полное руководство по роботизированной сварке на производстве
- Роботизированная рука:как это сделано?
- Робототехника в автомобилестроении
- Система складирования роботов:что это такое и как используется
- M2M или межмашинное взаимодействие, что это такое?
- Термография, что это такое и для чего она используется
- Индустрия 4.0, что она включает?