


Робо-морская звезда MIT CSAIL позволяет более подробно изучать водную жизнь
Ученые изобрели робо-морскую звезду, которая дает нам больше информации о водной жизни, как сообщает Адам Коннер-Саймонс или MIT CSAIL. (Смотрите видео ниже.)
Биологи уже давно столкнулись с проблемами документирования жизни в океане, поскольку многие виды рыб весьма чувствительны к подводным движениям человека.
В качестве возможного решения ученые-компьютерщики разрабатывают специальных морских роботов, которые могут незаметно перемещаться среди своих углеродных собратьев. Например, в 2018 году команда из Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института (CSAIL) изготовила мягкую роботизированную рыбу, которая автономно плавала вместе с настоящими рыбами вдоль коралловых рифов Фиджи.
Однако сложная динамика движения воды и ее способность быстро разрушать некоторые совершенно хорошие электронные системы сделали подводных роботов особенно сложными в разработке по сравнению с роботами для воздуха или земли.
Что касается рыбы, команде CSAIL пришлось пройти через месяцы проб и ошибок, чтобы вручную настроить конструкцию так, чтобы она могла надежно работать в воде.
Хотя этот робот был особенно сложным, группа под руководством профессоров Массачусетского технологического института Войцеха Матусика и Даниэлы Рус все еще чувствовала, что есть возможности для ускорения производственного процесса. Имея это в виду, они создали новый инструмент для моделирования и изготовления функционального мягкого робота за считанные часы.
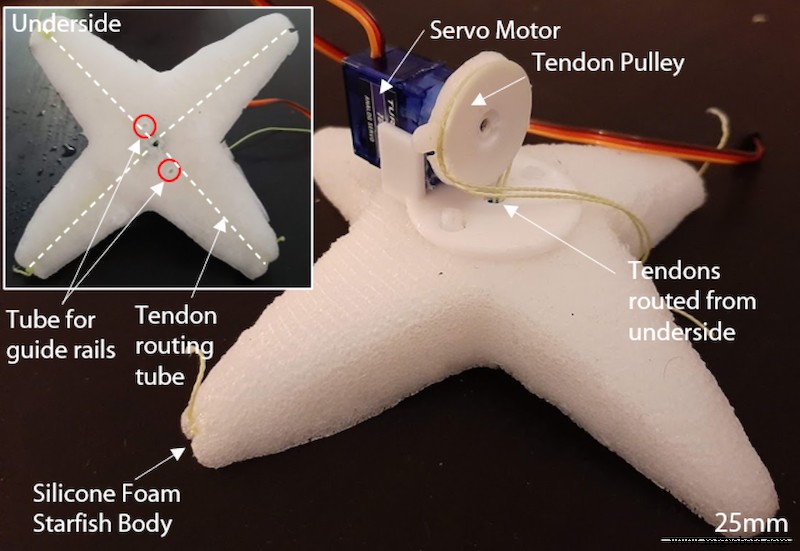
Команда использовала свою систему, чтобы сделать мягкую роботизированную морскую звезду из силиконовой пены, способную двигаться с помощью одного маломощного привода. Морская звезда передвигается с помощью сухожилий своих четырех ног, которые соединены с серводвигателем, который используется для сгибания и расслабления ног.
Постдоктор CSAIL Джозефин Хьюз, соавтор новой статьи о морской звезде вместе с аспирантом Тао Ду, говорит:«Пассивное взаимодействие между подводным роботом и силами жидкости вокруг него — будь то спокойное течение или волнообразная волна — гораздо сложнее, чем когда робот ходит по устойчивой местности, что делает создание его систем управления достаточно сложным.
«Но с помощью этого симулятора процесс, на который обычно уходят дни или недели, можно выполнить всего за несколько часов».
Ду говорит, что команда выбрала дизайн морской звезды из-за простоты и элегантности ее движения, когда ее ноги сжимаются и разжимаются, создавая движение вперед.
Тем не менее, команда обнаружила, что симулятор подходит для разных типов телосложения, поэтому в следующий раз они будут изучать конструкции, вдохновленные морскими черепахами, скатами манта и акулами, которые включают более сложные структуры, такие как суставы, плавники и ласты.
Инструмент группы включает в себя модель машинного обучения, выполняющую первоначальное моделирование и проектирование механизмов управления роботом, который затем быстро изготавливается.
Затем эксперименты с роботом в реальном мире используются для получения дополнительных данных для многократного улучшения и оптимизации его конструкции. В результате робота обычно приходится переизготавливать только один раз. (Отдельный документ о разработке инструмента моделирования в настоящее время находится на рассмотрении.)
«При моделировании роботов мы должны делать приближения, которые по определению создают разрыв между симуляцией и реальностью», — говорит Сесилия Ласки, профессор управления и мехатроники в Национальном университете Сингапура, не участвовавшая в исследовании. /Р>
«Эта работа предназначена для сокращения этого разрыва с реальностью с помощью смешанного цикла смоделированных и реальных экспериментов, что весьма эффективно».
Для тела морской звезды команда использовала силиконовую пену из-за ее эластичных свойств, естественной плавучести и способности быстро и легко изготавливаться. В экспериментах исследователи обнаружили, что морская звезда может двигаться в воде в четыре раза быстрее, чем при использовании контроллера, изготовленного вручную. экспертом-человеком.
Действительно, говорит Хьюз, команда обнаружила, что симулятор использует стратегии управления, о которых люди и не догадывались бы сами.
«В случае с морской звездой-роботом мы узнали, что в дополнение к вполне заметным движениям ног, которые они совершают, есть более тонкие высокочастотные движения, которые могут придать им важный импульс», — говорит Хьюз.
Проект основан на серии проектов CSAIL, посвященных мягким роботам, которые, по словам Раса, могут быть безопаснее, выносливее и маневреннее, чем их твердые аналоги.
Исследователи все чаще обращаются к мягким роботам для условий, требующих перемещения в тесных помещениях, поскольку такие роботы более устойчивы и способны восстанавливаться после столкновений.
Ласки говорит, что инструмент команды может быть использован для разработки роботов для измерения данных в разных местах в глубоком океане, а также для общего представления роботов, которые могут двигаться новыми способами, о которых исследователи еще не думали.
«Биоподобные роботы, такие как робот-морская звезда и SoFi, могут приближаться к морским обитателям, не беспокоя их», — говорит Рус. «В будущем благодаря быстрому проектированию и созданию роботизированных инструментов на основе биотехнологий можно будет создавать собственные обсерватории, которые можно будет использовать в дикой природе для наблюдения за жизнью».
Дю и Хьюз написали статью в соавторстве с Матусиком, Расом и выпускником Массачусетского технологического института Себастьяном Вахом. Статья была опубликована на этой неделе в Journal of Robotics Automation Letters, а в следующем месяце будет представлена практически на Международной конференции IEEE по мягкой робототехнике (RoboSoft).
Система управления автоматикой
- Sepro представляет своего первого робота «Сделано в Америке»
- Роботы в NPE:быстрее, сильнее, умнее
- Как занять роботов
- Литье под давлением:более быстрые роботы и коботы
- Роботы и создатели коботов объединяются
- 5-осевой универсальный диапазон роботов изменен
- Omron выпускает нового робота SCARA
- Nachi-Fujikoshi расширяет линейку компактных роботов
- 5 вещей, которые следует учитывать перед покупкой робота
- Роботы получают координацию рук и глаз