


Почему 6-осевые роботы-манипуляторы так распространены?
В промышленной робототехнике нет недостатка в марках, моделях, цветах, формах и размерах. Но когда дело доходит до механической конструкции, у всех брендов наблюдается много общего.
Промышленные шарнирно-сочлененные роботы-манипуляторы часто воспринимают как изображение высокотехнологичного производственного предприятия. Даже обычные валентинки-коллаборативные роботы (коботы) придерживаются одних и тех же механических структур - транспортировки полезных грузов, штабелирования, сортировки, укладки на поддоны, сборки и множества других повторяемых задач.
Видео предоставлено RobotWorx
Для всех марок и моделей выделяется одна общая характеристика:шесть осей движения. У некоторых моделей их больше, у многих меньше, но стандартная цель - 6-осевая. Что делает это число таким распространенным? Это приводит к двум связанным вопросам:будет ли менее шести осей плохой инвестицией; аналогично, если шесть - это хорошо, следует ли отдавать предпочтение семи или более осям?
Идеальный 6-осевой диапазон движения
Проще говоря, рука робота, имеющая шесть точек, вокруг которых может происходить движение, дает возможность захвату достигать любой точки внутри общего рабочего радиуса и достигать любой точки с помощью захвата (инструмент на конце руки или EOAT) в любом месте. ориентация.
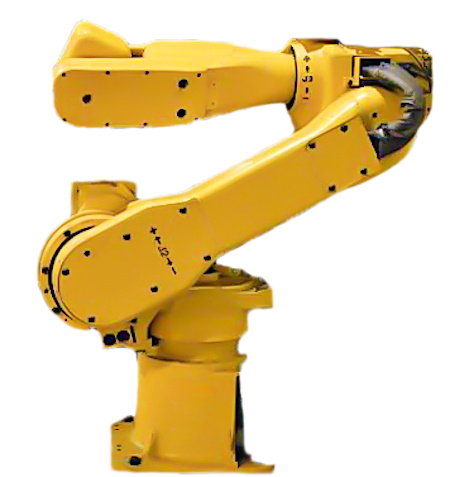
Рисунок 1. S-6 FANUC, один из их 6-осевых роботов. Изображение предоставлено RobotWorx
У этого упрощенного ответа есть несколько ограничений. Во-первых, общая рабочая зона (или конверт) может быть достигнута только с полностью вытянутым захватом, как если бы вы вытянули руку, чтобы дотянуться до объекта на расстоянии. Если угол захвата изменится, это определенно ограничит общий радиус действия. Кроме того, что, вероятно, совершенно очевидно, захват не может входить в твердую металлическую основу робота. Жесткие и мягкие ограничения по осям могут предотвратить такие столкновения.
Оси в типичном шарнирном рычаге представляют собой вращающиеся шарниры, поэтому они вращаются вокруг оси, определяемой центром двигателя или ведущего шкива. Напротив, некоторые разновидности роботов, такие как робот типа «дельта» или SCARA, используют линейные скользящие оси движения. Но шарнирно-сочлененные руки вращаются, а это означает, что положение сустава является измерением угла, а не линейным расстоянием.
Таким образом, этот «идеальный» 6-осевой робот может достичь любой возможной точки в пределах своего рабочего диапазона с любой ориентацией EOAT, что делает его идеальным выбором, если ваша заготовка находится под углом, не параллельным основанию робота.
Недостатки роботов с меньшим количеством осей
Этот вопрос может возникнуть при разработке системы, в которой 4- или 5-осевая модель может быть доступна по более низкой цене:будет ли пяти осей достаточно для моего приложения? Это не простой ответ "да" или "нет", но один фактор, безусловно, послужит поводом для расследования.
Предположим, робот будет работать с деталью или брать / извлекать предмет из места, не параллельного земле, на котором сидит робот. Затем вы должны внимательно подумать, будут ли работать пять осей.
Представьте себе сценарий, в котором горизонтальный конвейер подает продукт к роботу, прямо прикрепленному к полу, затем поднимает его и передает на другой горизонтальный конвейер. В этом случае может быть достаточно даже 4-осевого робота. Если концевой захват также необходимо повернуть для ориентации продукта, тогда необходимо использовать пятую ось.

Рисунок 2. Робот, работающий над конвейерной системой.
В более сложном сценарии лоток, расположенный под углом 45 градусов от земли, подает продукт, который должен извлечь робот. Это возможно только с 6-осевым роботом, если эта попытка не выровнена идеально, так что шестая ось не требуется.
Конечно, ситуацию не так легко определить, как «да» или «нет» для каждой ситуации. Тем не менее, эта проверка того, ориентированы ли объекты не параллельно основанию робота, а не параллельно, указывает на то, что следует проявлять осторожность.
Если робот предназначен для сварки, нанесения клея или любого другого следования пути, он почти наверняка должен иметь шесть осей.
Преимущества роботов с большим количеством топоров
Навесные оси обычно устанавливаются в индивидуальном порядке. Одним из распространенных примеров седьмой оси является подвижный стол, по которому робот может перемещаться, что позволяет ему одновременно обслуживать несколько станков с ЧПУ или выполнять разные этапы в процессе длинной сборочной линии. Если немного усложнить программирование, он может сэкономить огромные суммы инвестиций по сравнению с альтернативой покупки нескольких роботов.

Рисунок 3. 6-осевой манипулятор, работающий с высокоточным лазером с ЧПУ.
Иногда ось скольжения бывает вертикальной, а не горизонтальной, что может позволить роботу-палетоукладчику штабелироваться выше или системе складирования / извлечения можно выбирать из бункеров высоко над землей. В других случаях, вместо самого робота, установленного на подвижной базе, заготовка может располагаться на вращающемся столе. Это может позволить стационарному роботу охватить гораздо более широкий диапазон.
Другой пример - когда две 6-осевые руки установлены на пьедестале, образуя почти гуманоидный торс. Эти роботы могут иметь номера осей 12 и более, поскольку они состоят из 6-осевых рычагов.
У всех этих роботов есть явные преимущества, и они могут оказаться достойным вложением средств. Но если дополнительные оси не нужны, некоторые из них могут быть слишком сложными и более подверженными сбоям. В любом случае стоит обратиться за советом к профессионалам, чтобы изучить процесс и среду, чтобы определить, какой робот лучше всего подходит для каждого приложения.
Промышленный робот
- Что такое рычаги смещенного рычага?
- Почему вам следует прекратить программировать своих роботов
- Почему DSP внезапно стали повсюду
- Почему важны системы решеток из стекловолокна?
- DIY-Robot? Вот 4 важных момента, которые следует учитывать
- Почему печатные платы обычно зеленые?
- Что такое коботы?
- Почему мы поднимаем серию B
- Почему нужны мельхиоровые лады?
- Зачем вам нужен робот для напитков?