


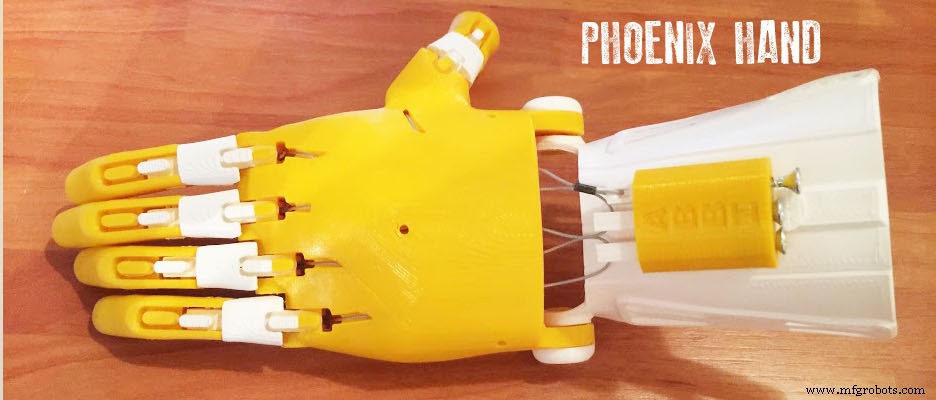
Протез руки, напечатанный на 3D-принтере с емкостным датчиком прикосновения
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
В этом проекте я предложил идею, которая может быть реализована на существующих протезах рук, напечатанных на 3D-принтере. В существующем протезе с электрическим приводом мне не удалось найти применение технологии емкостного сенсорного датчика . для срабатывания пальцев . Этот проект сочетает в себе две очень крутые вещи:Arduino с емкостным датчиком касания для срабатывания и ремикс руки e-NABLE Phoenix дизайн.
В основном рука Феникса - это рука с телом. В рамках этого проекта я преобразовал его в протез с электрическим приводом, выбрав необходимую конструкцию детали.
Преимущество емкостного определения прикосновения заключается в том, что с помощью прикосновения вы можете легко приводить в действие пальцы. В настоящее время эта модель не может управлять отдельными пальцами, и требуется дальнейшее развитие способности выдерживать вес и хватать.
Соберите детали:
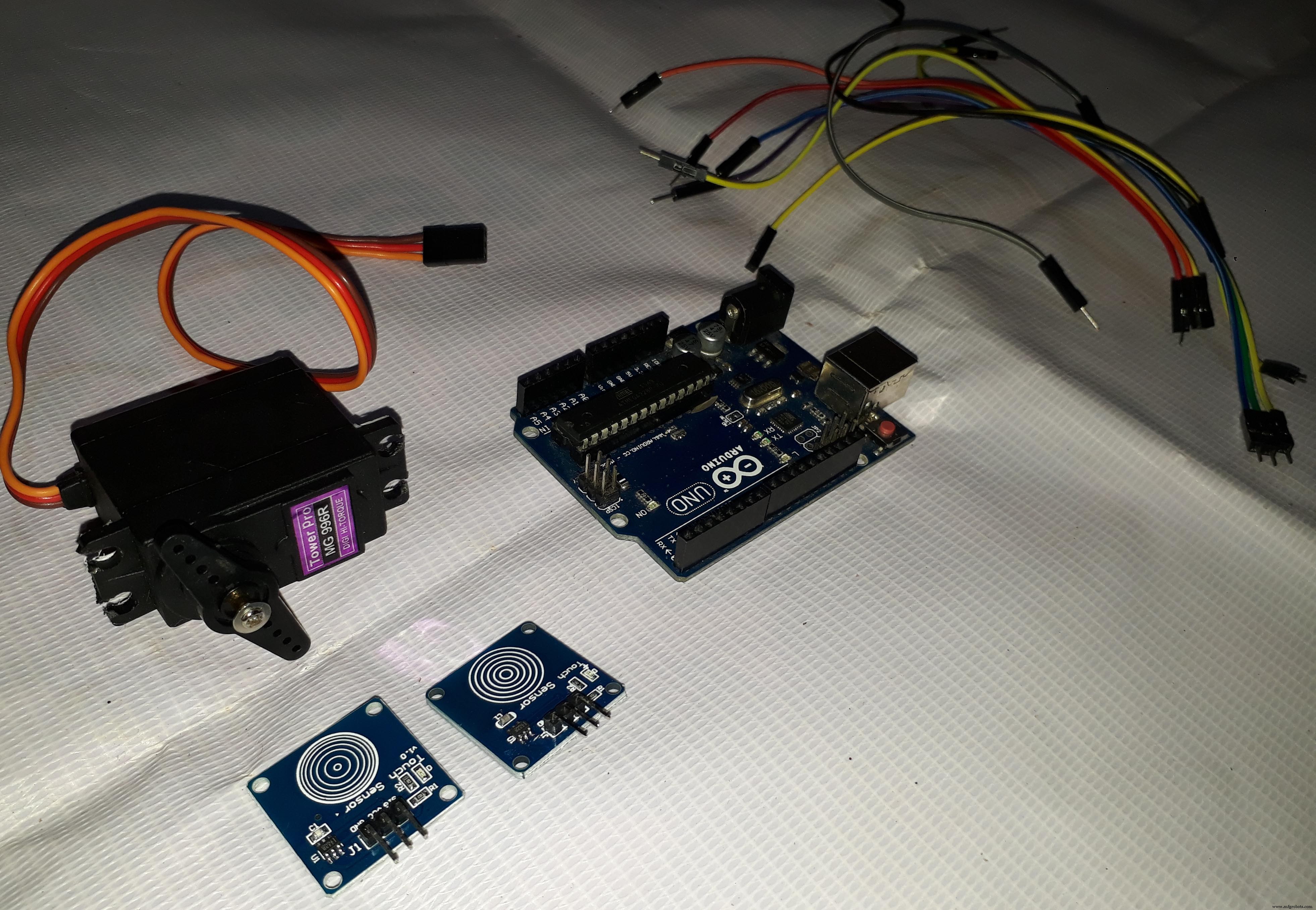
- Arduino Uno
- Датчик касания TTP223 -2
- Серводвигатель MG996R
Сборка Длани Феникса:
Детали сборки руки Phoenix упоминаются в следующих шагах ...
Я использовала сгибатель в качестве лески . и разгибатели в виде резинки
Инструменты:
- 3D-принтер
- Клеевой пистолет
Печать руки:
В этом проекте используется ранее разработанный e-NABLE Рука Феникса.
В соответствии с моими требованиями я напечатал только следующие части
Пальцы
- finger_phalanx.stl -4 штуки
- fingertip_long.stl - 2 штуки
- fingertip_short.stl - 2 штуки
- thumb_phalanx.stl -1 штука
- thumbtip.stl -1 штука
Ладонь
- palm_right_new_supports.stl -1 штука
Кнопки
- fingertip_pin.stl - 4 штуки
- knuckle_pin_long.stl -1 штука
- knuckle_pin_short.stl -2 штуки
- thumb_knuckle_pin.stl - 1 штука
- thumbtip_pin.stl - 1 штука
Поскольку уже есть подробные инструкции по его созданию, я не буду вдаваться в подробности
Для печати я использовал 3D-принтер Flsun. Всего на печать ушло 10–12 часов
(примечание:эти части предназначены для правой руки)
Сборка рук:
Процесс сборки руки Феникса уже доступен, поэтому я не буду вдаваться в подробности. Если у вас есть сомнения, оставьте комментарий.
Я использовал сгибатели в качестве лески и разгибатели в качестве резинки.
** может потребоваться сглаживание для гладкой посадки
Электронные компоненты:
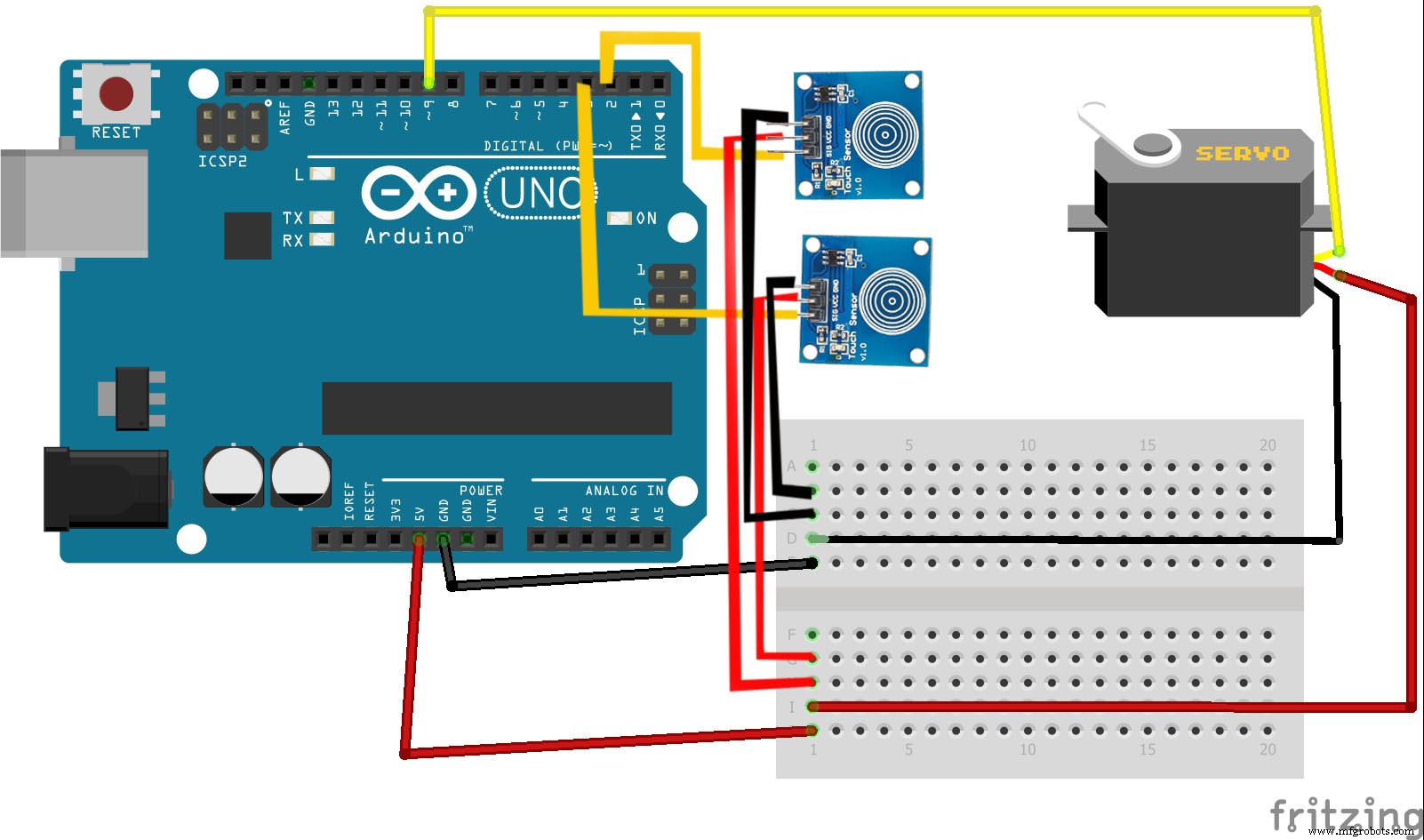
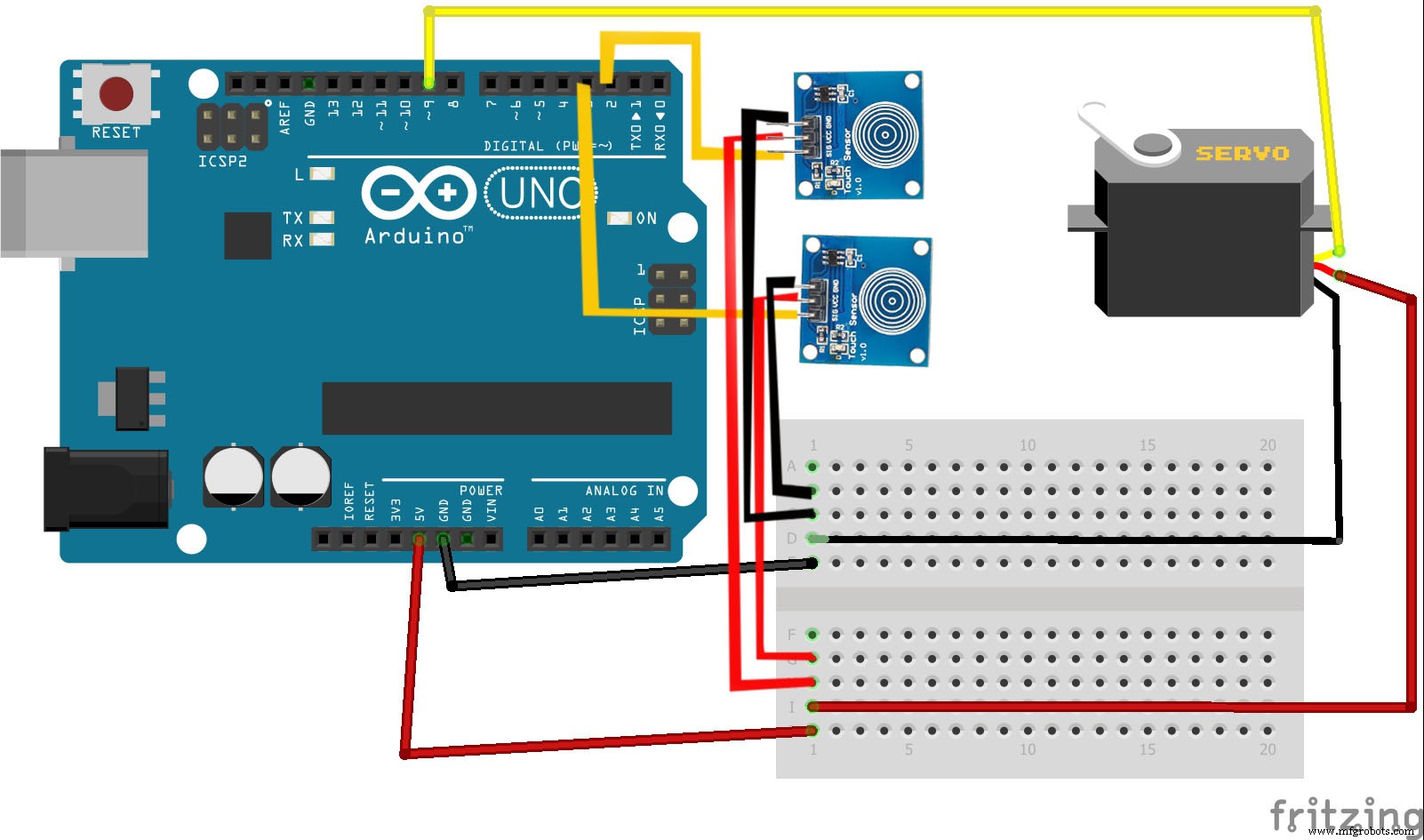
Срабатывание контролируется двумя сенсорными датчиками (TTP223). Вход от сенсорного датчика открывает и закрывает пальцы через серводвигатель.
Принципиальная схема и код Arduino:
Счастливо изготовление!
Большое спасибо за чтение, если вам нужна дополнительная информация, не стесняйтесь спрашивать в комментариях, и я постараюсь ответить вам.
Код:
#include Серво-резервуар; #define CTS1Pin 2 // Вывод емкостного сенсорного датчика 1 # define CTS2Pin 3 // Вывод емкостного сенсорного датчика 2int pos; void setup () {myservo.attach (9); // подключает сервопривод на выводе 9 к сервообъекту} void loop () {int CTSValue1 =digitalRead (CTS1Pin); int CTSValue2 =digitalRead (CTS2Pin); if (CTSValue1 ==HIGH) {for (pos =0; pos <=180; pos + =1) myservo.write (pos); задержка (15); } если (CTSValue2 ==HIGH) {для (pos =180; pos> =0; pos - =1) myservo.write (pos); задержка (15); }} Код
- Эскиз Arduino
Эскиз Arduino Arduino
#includeСерво-резервуар; #define CTS1Pin 2 // Вывод емкостного сенсорного датчика 1 # define CTS2Pin 3 // Вывод емкостного сенсорного датчика 2int pos; void setup () {myservo.attach (9); // подключает сервопривод на выводе 9 к сервообъекту} void loop () {int CTSValue1 =digitalRead (CTS1Pin); int CTSValue2 =digitalRead (CTS2Pin); if (CTSValue1 ==HIGH) {for (pos =0; pos <=180; pos + =1) myservo.write (pos); задержка (15); } if (CTSValue2 ==HIGH) {для (pos =180; pos> =0; pos - =1) myservo.write (pos); задержка (15); }}
Схема
Производственный процесс
- Печатная плата
- Обработка 3D-печатных деталей ... мелками?
- Введение в емкостные акселерометры:измерение ускорения с помощью емкостного считывания
- Протезирование с 3D-печатью - будущее
- Divide By Zero представляет 3D-печатные карты своими руками с помощью Google Maps
- Лучший контроль качества с 3D-печатными деталями
- Закрепите себя функциональными деталями, напечатанными на 3D-принтере!
- Трансформация цепочки поставок с помощью человеческого вмешательства
- Стандартный токарный станок с сенсорным экраном
- Универсальное тактильное восприятие с электромеханически связанными проводниками