


Введение в емкостные акселерометры:измерение ускорения с помощью емкостного считывания
В этой статье мы обсудим, как использовать емкостное зондирование для измерения ускорения.
Акселерометры находят применение в различных областях применения. Например, в автомобилях акселерометры используются для активации системы подушек безопасности. В камерах используются акселерометры для активной стабилизации изображений. Жесткие диски компьютеров также используют акселерометры для обнаружения внешних ударов, которые могут повредить головку чтения / записи устройства. В этом случае акселерометр приостанавливает работу привода при возникновении внешнего удара. Это всего лишь несколько приложений для акселерометра.
На самом деле возможности использования этих устройств безграничны. Огромный прогресс в технологиях микропроизводства позволил создать сегодня небольшие недорогие микромашинные акселерометры. Фактически, небольшой размер и низкая стоимость - два основных фактора, которые позволяют нам применять эти устройства в таком широком спектре приложений.
В этой статье мы рассмотрим физику измерения ускорения. Мы увидим, как структура масса-пружина-демпфер (также известная как масса-демпфер-пружина) может преобразовывать ускорение в величину смещения и как можно применить подход емкостного измерения для преобразования этого смещения в электрический сигнал, пропорциональный величине смещения. применяемое ускорение.
Измерение ускорения с помощью пружины-демпфера
Для измерения ускорения можно использовать конструкцию масса-пружина-демпфер, показанная на рисунке 1.
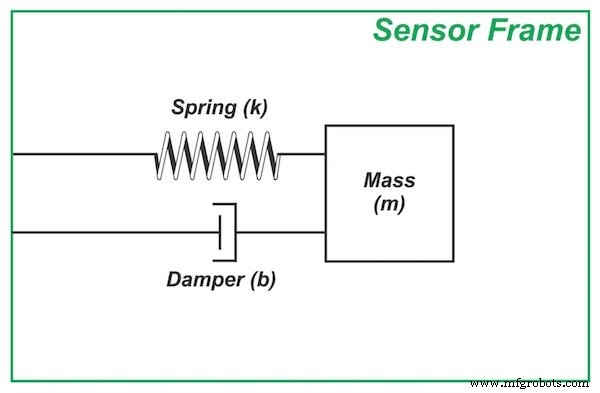
Рисунок 1. Структура "масса-пружина-демпфер"
Известная масса, обычно называемая контрольной массой (или испытательной массой), соединяется с рамой датчика через пружину.
Хотя демпфер является жизненно важным компонентом этой системы, мы отложим его до следующей статьи из этой серии, поскольку он может быть немного загадочным для EE и может потребоваться несколько абзацев для ознакомления с основными концепциями демпфера.
Давайте посмотрим, как структура, показанная на рисунке 1, может определять ускорение.
Когда рама датчика ускоряется из-за внешней силы, контрольная масса имеет тенденцию «держаться назад» из-за своей инерции. Это изменяет относительное положение контрольной массы относительно корпуса датчика, как показано ниже.
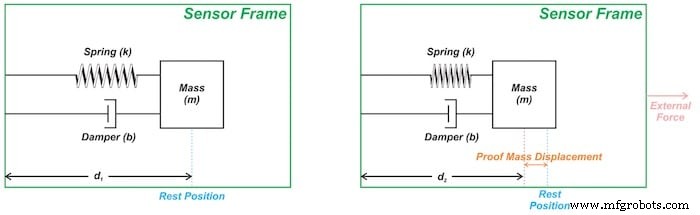
Рисунок 2. (а) Контрольная гиря находится в исходном положении при отсутствии внешней силы. (b) Когда рамка ускоряется вправо, наблюдатель в рамке датчика замечает, что контрольная масса смещена влево от своего положения покоя.
На рис. 2 (а) показан контрольный груз в положении покоя при отсутствии внешней силы. Когда к раме прикладывается внешняя сила, как показано на рисунке 2 (b), рама ускоряется вправо. Контрольная масса изначально стремится оставаться в покое, что изменяет относительное положение контрольной массы по отношению к раме (d 2
Наблюдатель в неинерциальной (то есть ускоряющейся) системе отсчета датчика замечает, что контрольная масса смещена влево от своего положения покоя. Пружина сжимается из-за смещения контрольной массы и оказывает на пробную массу силу, пропорциональную смещению. Сила, создаваемая пружиной, толкает контрольную массу вправо и заставляет ее ускоряться в направлении внешней силы.
Если соответствующие значения выбраны для различных параметров системы, смещение контрольной массы будет пропорционально значению ускорения рамы (после того, как переходная характеристика системы прекратится).
Подводя итог, можно сказать, что конструкция "масса-пружина-демпфер" преобразует ускорение корпуса датчика в смещение контрольной массы. Остается вопрос:как мы можем измерить это смещение?
Измерение смещения пробной массы:подход емкостного измерения
Смещение контрольной массы можно измерить несколькими способами. Одним из распространенных методов является емкостное зондирование, показанное на рисунке 3.
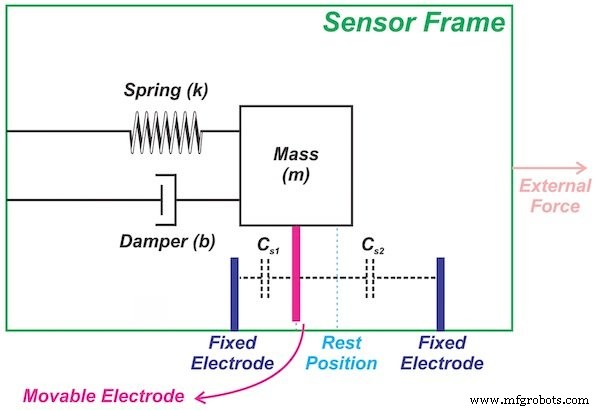
Рисунок 3
К раме датчика прикреплены два электрода, а также подвижный электрод, соединенный с контрольной массой. Это создает два конденсатора C s1 и C s2 , как показано на рисунке 3.
Когда контрольная масса движется в одном направлении, емкость между подвижным электродом и одним из неподвижных электродов увеличивается, а емкость другого конденсатора уменьшается. Вот почему нам нужно только измерить изменения в конденсаторах считывания, чтобы обнаружить смещение контрольной массы, которое пропорционально входному ускорению.
Формирование сигнала акселерометра с использованием синхронной демодуляции
Чтобы точно измерить изменения в считывающих конденсаторах, мы можем применить метод синхронной демодуляции. На рисунке 4 показана упрощенная версия преобразования сигнала, используемого в акселерометрах семейства ADXL от Analog Devices.
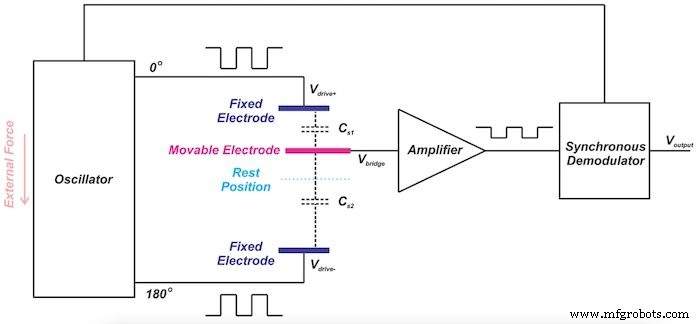
Рисунок 4. Изображение (адаптировано) любезно предоставлено Analog Devices
В этом случае прямоугольный сигнал частотой 1 МГц используется в качестве возбуждения переменного тока измерительных конденсаторов C s1 и C s2 . Прямоугольные волны, приложенные к неподвижным электродам, имеют одинаковую амплитуду, но сдвинуты по фазе на 180 ° друг относительно друга. Когда подвижный электрод находится в исходном положении, напряжение на входе усилителя равно нулю вольт.
Когда подвижный электрод приближается к одному из неподвижных электродов, большая часть напряжения возбуждения от этого электрода появляется на входе V моста усилителя. , что означает, что прямоугольная волна, которая появляется на входе усилителя, синфазна с напряжением возбуждения более близкого электрода.
Например, на рисунке 4 усиленный выходной сигнал представляет собой прямоугольную волну в фазе с V drive + потому что C s1 больше, чем C s2 .
Амплитуда V моста является функцией смещения контрольной массы; однако нам также необходимо знать фазовое соотношение V bridge относительно V drive + и V drive- для определения направления смещения контрольной массы.
Синхронный демодулятор в основном умножает выход усилителя на напряжение возбуждения (либо V drive + или V диск- ) для преобразования прямоугольной волны на выходе усилителя в напряжение постоянного тока, которое показывает величину смещения, а также его направление.
Чтобы узнать, как синхронная демодуляция достигает этого, обратитесь к моей статье о методах демодуляции LVDT:Демодуляция LVDT:тип выпрямителя против синхронной демодуляции.
Почему бы нам не использовать одинарный чувствительный конденсатор?
Емкостное зондирование, изображенное на рисунке 3, имеет дифференциальную природу:когда C s1 увеличивается, C s2 уменьшается, и наоборот.
Также возможно использование несимметричного емкостного считывания, когда один из фиксированных электродов отсутствует, таким образом, имеется только один переменный конденсатор. В этом случае мы можем смоделировать систему, как показано на рисунке 5.
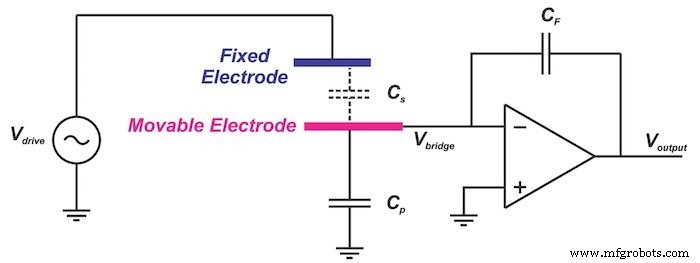
Рисунок 5
Эта односторонняя версия кажется более простым решением. Итак, почему бы нам не использовать единственный конденсатор датчика?
Конструкция с одинарным чувствительным конденсатором:нелинейный выход
Давайте рассмотрим эту схему более внимательно.
На приведенном выше рисунке C p моделирует полную паразитную емкость от подвижного электрода до земли. В идеале V мост находится на виртуальной земле, и мы можем игнорировать C p потому что с одной стороны у него земля, а с другой - виртуальная.
Следовательно, результат можно просто получить как:
\ [V_ {output} =- \ frac {C_s} {C_F} V_ {drive} \]
Уравнение 1
Обратите внимание, что путь тока смещения не показан на рисунке 5. Используя основное уравнение конденсатора, мы можем выразить выходной сигнал в терминах смещения контрольной массы.
Для конденсатора C имеем:
\ [C =\ epsilon \ frac {A} {d} \]
Уравнение 2
где ε - диэлектрическая проницаемость, A - площадь параллельной пластины, а d - расстояние между двумя проводящими пластинами. Для простоты предположим, что два конденсатора C s и C F имеют одинаковые ε и A.
Уравнение 1 можно упростить до:
\ [V_ {output} =- \ frac {d_F} {d_s} V_ {drive} \]
где d F и d s обозначают расстояние между электродами C F и C s , соответственно. d s можно выразить как сумму начального расстояния d 0 и величина смещения Δd.
Оттуда мы можем получить:
\ [V_ {output} =- \ frac {d_F} {d_0 + \ Delta d} V_ {drive} \]
Как видите, член смещения (Δd) находится в знаменателе выходного уравнения. Следовательно, выходной сигнал является нелинейной функцией смещения контрольной массы Δd.
Дифференциальная структура:линейный выход
Давайте рассмотрим передаточную функцию дифференциального емкостного измерения, изображенного на рисунке 4.
Вы можете убедиться, что с помощью дифференциального емкостного измерения V мост предоставляется:
\ [V_ {bridge} =\ frac {C_ {s1} V_ {drive +} + C_ {s2} V_ {drive -}} {C_ {s1} + C_ {s2 }} \]
Применяя уравнение 2 и предполагая, что два конденсатора C s1 и C s2 имеют одинаковые значения ε и A, получаем:
\ [V_ {bridge} =\ frac {d_ {s2} V_ {drive +} + s_ {s1} V_ {drive -}} {d_ {s1} + d_ {s2] }} \]
Уравнение 3
где d s1 и d s2 обозначают расстояние между электродами C s1 и C s2 , соответственно. Когда d s1 увеличивается, d s2 уменьшается на ту же величину и наоборот.
Предполагая, что:
\ [d_ {s1} =d_0 - \ Delta d \]
\ [d_ {s2} =d_0 + \ Delta d \]
\ [V_ {drive +} =- V_ {drive-} \]
Уравнение 3 упрощается до:
\ [V_ {bridge} =\ frac {\ Delta d} {d_0} V_ {drive +} \]
Как видите, в дифференциальной структуре выходное напряжение является линейной функцией смещения контрольной массы Δd. Обратите внимание, что, хотя мы могли бы использовать программное обеспечение для удаления ошибок линейности датчика, желательно иметь линейный отклик, поскольку он увеличивает точность измерения и облегчает калибровку системы.
Заключение
Мы увидели, как структура масса-пружина-демпфер может преобразовывать ускорение в величину смещения и как можно применить подход емкостного измерения для преобразования этого смещения в электрический сигнал, пропорциональный приложенному ускорению.
Мы также вкратце упомянули, что для того, чтобы смещение контрольной массы было пропорционально приложенному ускорению, необходимо соответствующим образом выбрать различные параметры системы масса-пружина-демпфер.
В следующей статье мы выведем передаточную функцию системы масса-пружина-демпфер, чтобы лучше понять работу системы.
Чтобы увидеть полный список моих статей, посетите эту страницу.
Датчик
- Введение в 3D-печать из пластика
- Truphone позволяет массовое развертывание Интернета вещей с помощью iSim Collaboration
- Würth:3-осевой датчик ускорения с предустановленными функциями
- Измерение температуры с помощью RASPBERRY PI
- Не можете справиться с массой жалоб клиентов? AI спешит на помощь
- Универсальное тактильное восприятие с электромеханически связанными проводниками
- Акселерометр на основе лазерного излучения
- Скорость или ускорение? что важнее при гидроабразивной резке
- Введение в аппарат для точечной сварки с емкостным разрядом
- Предустановка инструмента с ЧПУ и измерение инструмента с ЧПУ. Введение