


Робот-снегоочиститель
Компоненты и расходные материалы
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 6 |
Об этом проекте
Почему я хотел создать робота-снегоочистителя? Поскольку я неравнодушен к решениям, облегчающим жизнь, я рассмотрел идею создания и предложения решения, которое могло бы помочь людям избежать зимних холодов и усталости от использования традиционной ручной лопаты для убрать снег с проезжей части. Для этого я выбрал что-нибудь забавное и технологичное. Таким образом, я решил начать разработку робота-снегоочистителя с дистанционным управлением, сильной механикой, управляющей электроникой и мощными электродвигателями. В результате получилась миниатюрная версия настоящего снегоочистителя с гусеницами, моторизованным отвалом (который можно поднимать и перемещать) и световым проектором, установленным сверху, чтобы освещать путь в темноте. Роботом можно дистанционно управлять с помощью пульта дистанционного управления PlayStation.
В следующем видео вы можете увидеть робота-снегоочистителя в действии. Кто-то сказал мне, что кажется, что для работы с лопатой робот-снегоочиститель должен совершить разбег, ЭТО НЕ ТАК , Я сделал видео, чтобы показать, как убирают снег.
Как это сделано?
Робот состоит из рамы, которая поддерживает моторизованный отвал (который можно поднимать и перемещать), и тяговую систему, состоящую из электродвигателей, колес и гусениц. Шасси выполнено из стальных стержней прямоугольного сечения, сваренных вместе. Размеры робота без лезвия 600X375X240 мм, а вес около 30 кг.
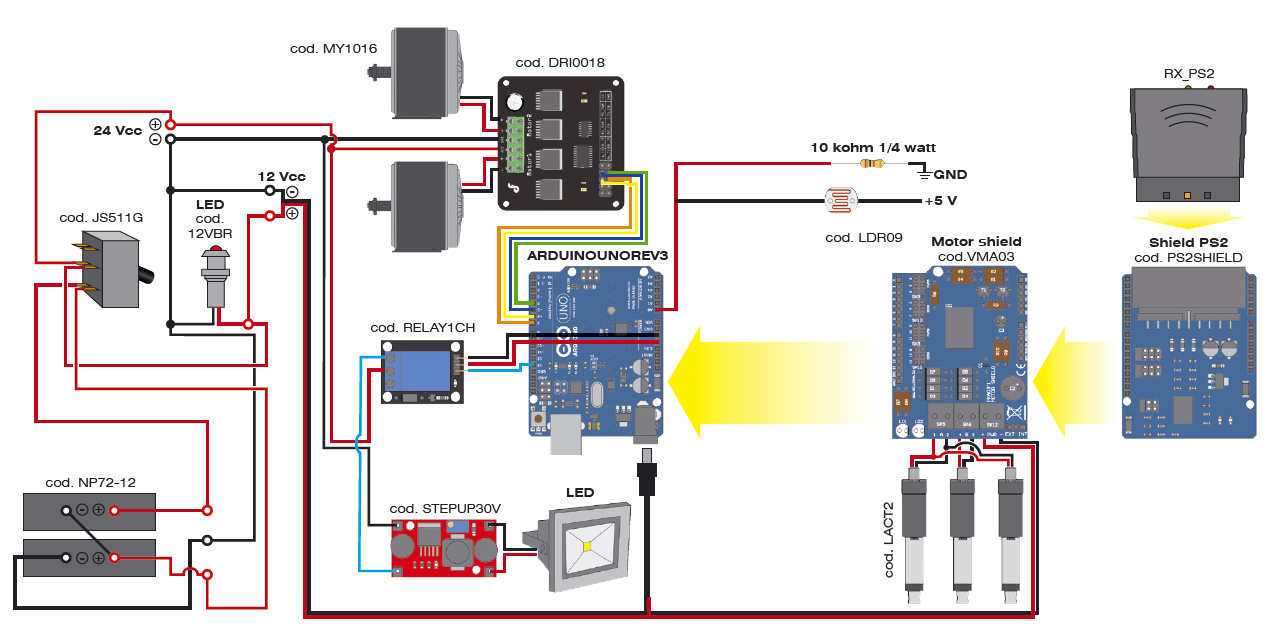

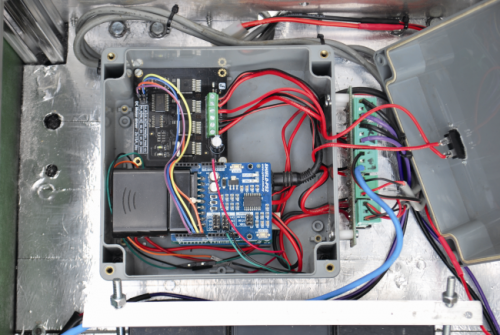
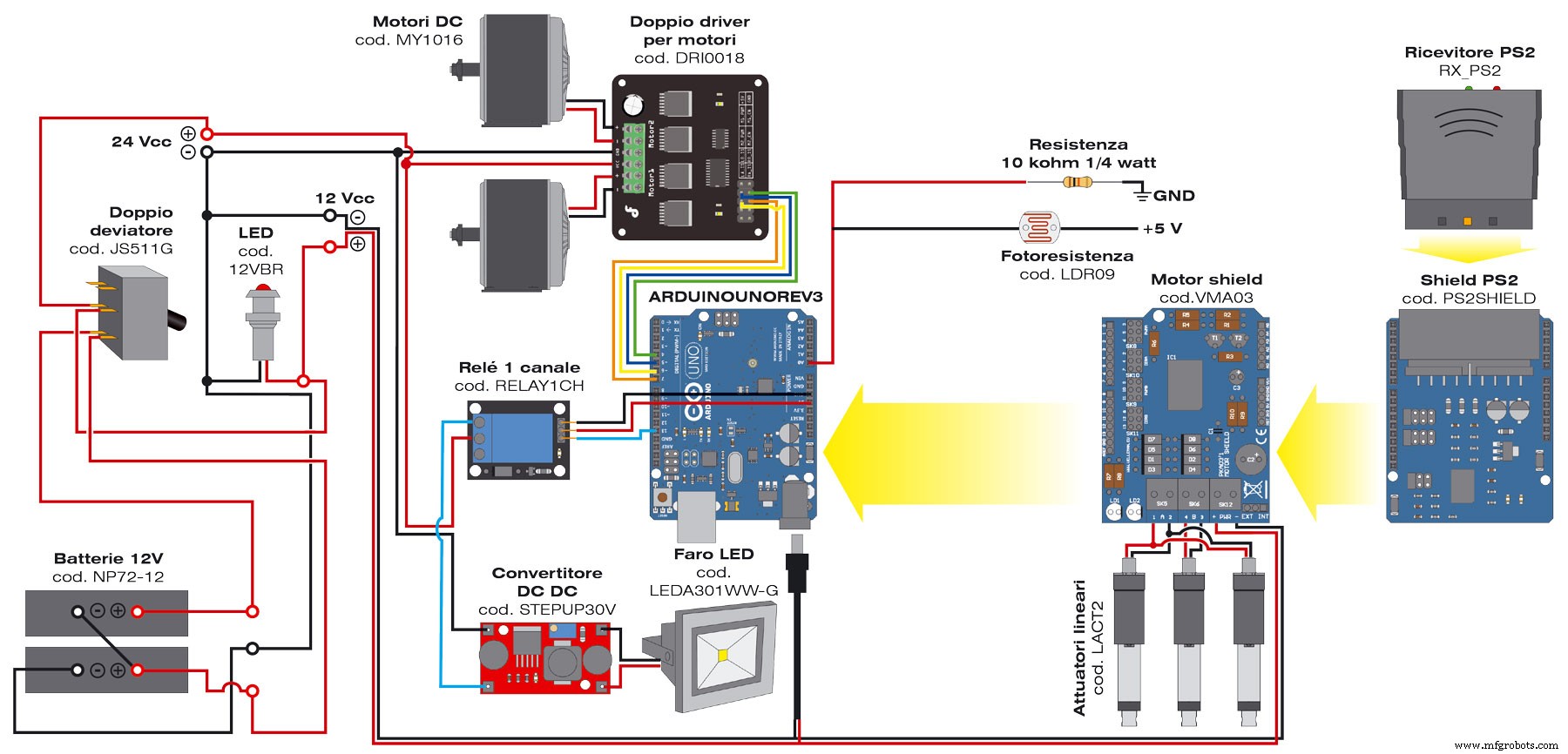
Электрическая и электронная часть снегоочистителя построена на базе Arduino Uno, имеет три щита и взаимодействует с:
- ВОДИТЕЛЬ МОТОРА
- КАНАЛ РЕЛЕЙНОЙ ПЛАТЫ
- Повышение преобразователя постоянного / постоянного тока
Щит, установленный на Arduino, представляет собой моторный щит для управления тремя линейными двигателями, которые управляют движением лезвия, и PS2SHIELD, который позволяет взаимодействовать с PlayStation 2 (PS2); для последнего требуется RX-PS2, который представляет собой радиоприемник 2,4 ГГц для отправки / получения определенных команд с вышеупомянутой консоли. Схема подключения робота - это то, что вы найдете на этих страницах; Источник питания представляет собой серию из двух свинцово-гелевых аккумуляторов емкостью 7,2 Ач:мы берем 12 В от среднего соединения двух, а между отрицательным и положительным полюсом ряда мы берем 24 В. Переключатель (125 В, 2 × 15 ампер) управляет двумя линиями питания. С 12 вольт мы запускаем Arduino, который запитывает экраны через контактную полоску; светодиод (внутренняя установка ограничивающего резистора) укажет, когда Arduino работает.
Напряжение 12 В непосредственно из аккумуляторной батареи также питает силовую часть моторного щита. Фактически, поскольку потребление трех линейных приводов (код LACT2) высокое, не рекомендуется брать 12 В от Arduino:вы выбираете внешний источник питания, который будет подан на соответствующий терминал PWR. Чтобы использовать внешний источник питания, необходимо переместить перемычку (на экране) рядом с клеммой, между центральной и EXT. Для управления щитом требуется специальная библиотека для Arduino, поставляемая с компонентом. Каждый линейный привод состоит из мотор-редуктора 12 В постоянного тока, использующего червячный винт для перемещения вала вперед и назад по его длине (максимальный ход 5 см).
Привод имеет динамическую нагрузку 50 кг и максимальную скорость 1,3 см / с. Он способен выдерживать до 250 кг в неподвижном состоянии, а крутящий момент обеспечивает сохранение положения вала даже при отсутствии питания. Два концевых выключателя обеспечивают остановку двигателя при достижении максимального растяжения и сжатия, а диоды позволяют изменять направление вращения после достижения предельной точки. Привод изготовлен из металла и герметизирован для защиты от пыли и воды (степень защиты IP63).
Давайте теперь перейдем к линии питания 24 В, которая питает силовую часть снегоочистителя, это тяговая и проекторная (опционально) секции:первая основана на драйвере двигателя, которая должна быть подключена четырьмя проводами к такое же количество цифровых линий Arduino. Привод двигателя представляет собой двухмостовой силовой привод, способный непрерывно управлять двумя щеточными двигателями с напряжением не более 35 В постоянного тока и током 15 А (каждый).
Взаимодействуя с Arduino и используя только четыре цифровых входа / выхода (2 ШИМ), вы можете выбрать направление вращения и скорость двигателей. Схема имеет четыре управляющих контакта, четыре светодиода, указывающих направление вращения двигателей, два контакта для источника питания платы (5 В постоянного тока) и два алюминиевых радиатора, расположенных в задней части печатной схемы, необходимых для отвода тепла, выделяемого во время работы. на полную мощность.
Для управления драйвером со стороны Arduino производитель предоставляет специальную библиотеку. Выходные клеммные колодки позволяют подключать два двигателя, которые должны быть подключены, как показано на схеме (не меняйте полярность, иначе дорожки будут идти в обратном направлении!), Используя кабели сечением не менее 1,5 кв. Мм. Что касается управляющих входов, следует учитывать соединение между Arduino и разъемом контроллера с шагом 2,54; соответствие, необходимое при использовании библиотеки, предоставленной производителем, и нашей прошивки:если вы их редактируете, вам придется пересматривать соединения.
Помните, что DIR - это логические уровни для установки направления вращения двигателей, а PWM - это сигналы PWM для управления драйверами питания. Чтобы идентифицировать контакты разъема контроллера, достаточно обратиться к шелкографии, видимой рядом с ним на стороне компонентов печатной платы. В дополнение к контроллеру двигателя, 24 вольта будут питать секцию светодиодного проектора, вы можете установить или нет; если он установлен, соблюдайте указанную проводку и не забудьте взять положительный 24 В с релейной карты (код RELAY1CH). Последний содержит реле и соответствующий управляющий транзистор, управляемый Arduino через цифровой ввод / вывод 13; Arduino также запитывает карту через + 5 В и землю (GND).
Реле позволяет включать и выключать проектор, нацеливая действие на соответствующую цепь. Проектор предназначен для работы от 220 В переменного тока, однако, поскольку это напряжение недоступно для робота, чтобы избежать использования инвертора, мы модифицировали проектор, открыв его, отключив переменный / постоянный ток и подключив два провода светодиода питания напрямую. к выходу преобразователя DC / DC (код STEPUP30V); последний представляет собой переключающий преобразователь с регулируемым выходным напряжением, которое следует настраивать, чтобы подавать на светодиод ток, чтобы он работал с мощностью около 10 Вт. Обычно это достигается при напряжении около 30 вольт. Однако помните, что мощность задается произведением VxI (ток на напряжение в ваттах получается, если V выражается в вольтах, а I - в амперах), то при 30 В потребление тока должно быть чуть менее 340 мА. Хотя группа светодиодов внутренне защищена от перегрузки по току, STEPUP30V имеет ограничение выходного тока до 2 А, поэтому может быть полезно заменить его на DC / DC с ограничителем выходного тока.
Получение данных от пульта дистанционного управления - это работа, выполняемая щитом PS2SHIELD, для которого производитель предоставляет специальную библиотеку. Щит выполняет прием и декодирование команды; радиочасть оставлена для RX _PS2, который вставляется в соответствующий разъем. Последнее, на что следует обратить внимание, это фоторезистор, используемый Arduino для обнаружения окружающего освещения и для управления платой RELAY1CH, чтобы светодиодный проектор был включен; Компонент подается на делитель напряжения резистором 10 кОм (1/4 Вт) и считывается с аналогового входа A0 Arduino. 5 вольт взяты из Arduino 5V. Этот датчик освещенности делает простую вещь:при хорошем освещении сопротивление фоторезистора низкое, а напряжение, считываемое АЦП микроконтроллера Arduino, низкое и не вызывает срабатывания платы реле; вместо этого темнота значительно увеличивает сопротивление, и АЦП считывает напряжение, близкое к 5 вольт, что приводит к включению проектора.
ИНСТРУКЦИИ ПО СТРОИТЕЛЬСТВУ
КРАТКОЕ РУКОВОДСТВО
Код
- Набросок
Скетч Arduino
https://cdn.hackaday.io/files/869403719640960/Vittorio_Snowplow_Robot.zip
Схема
Производственный процесс