


Swiper - Auto Tinder / Bumble Swiper
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Предыстория
Мои друзья сделали мне Tinder, и, как и большинство людей, использующих приложение, я быстро разочаровался в его монотонности. Затем я понял, что я гораздо лучший инженер, чем потенциальный помощник, поэтому я собрал все это вместе из дешевого шагового двигателя, который у меня лежал. Так что теперь вы также можете получать более 800 смахиваний в час с этим на Bumble или Tinder!
Краткий обзор:
Для создания этой сборки есть три быстрых шага:распечатать детали, подключить + проверить шаговый двигатель и собрать все вместе.
Шаг 1. Печать деталей
Посетите https://www.thingiverse.com/thing:2849598 для файлов для 3D-печати. Главное, что нужно отметить в отношении этих файлов, это то, что я использовал заполнение на 50% для создания основы, это нужно для того, чтобы утяжелить основу, чтобы она не двигалась при скольжении.
Шаг 2. Шаговый двигатель
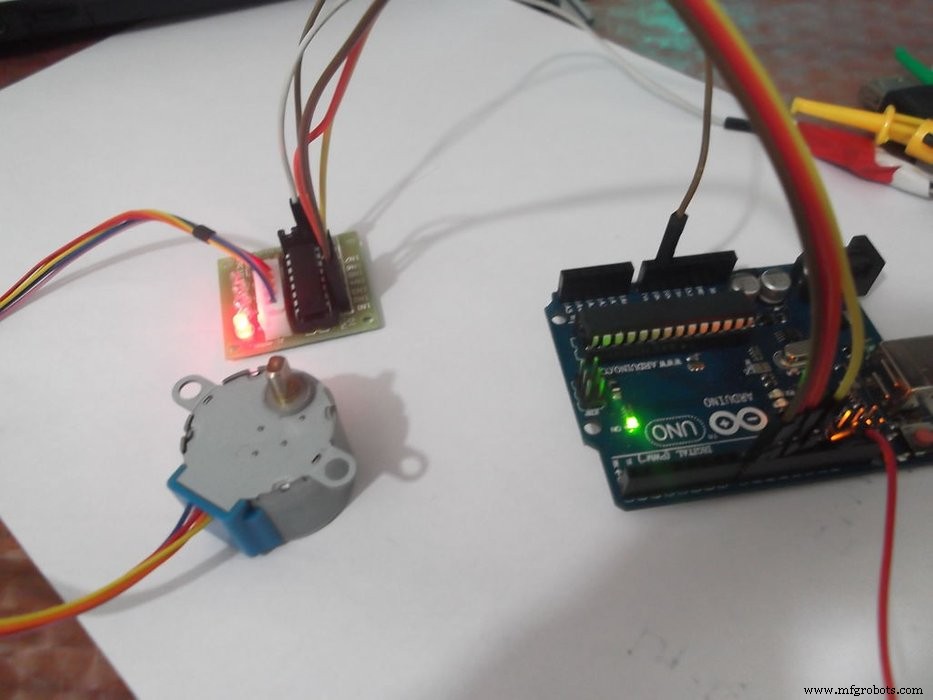
Я использовал униполярный шаговый двигатель 28-BYJ48 и драйвер шагового двигателя SBT0811. Любой драйвер шагового двигателя, который работает с 28-BYJ48, должен работать нормально, просто убедитесь, что он подключен к Arduino Uno в соответствии со следующей настройкой, или измените код, чтобы отразить ваши изменения:
- IN1>> D8
- IN2>> D9
- IN3>> D10
- IN4>> D11
- VCC>> 5 В
- Gnd >> Земля
Код для Arduino Uno находится внизу страницы. На этом этапе вы сможете просто загрузить код на свою Arduino и получить шаговый двигатель, вращающийся по часовой стрелке! Если вы хотите изменить направление вращения против часовой стрелки, просто переключите направление значение переменной false

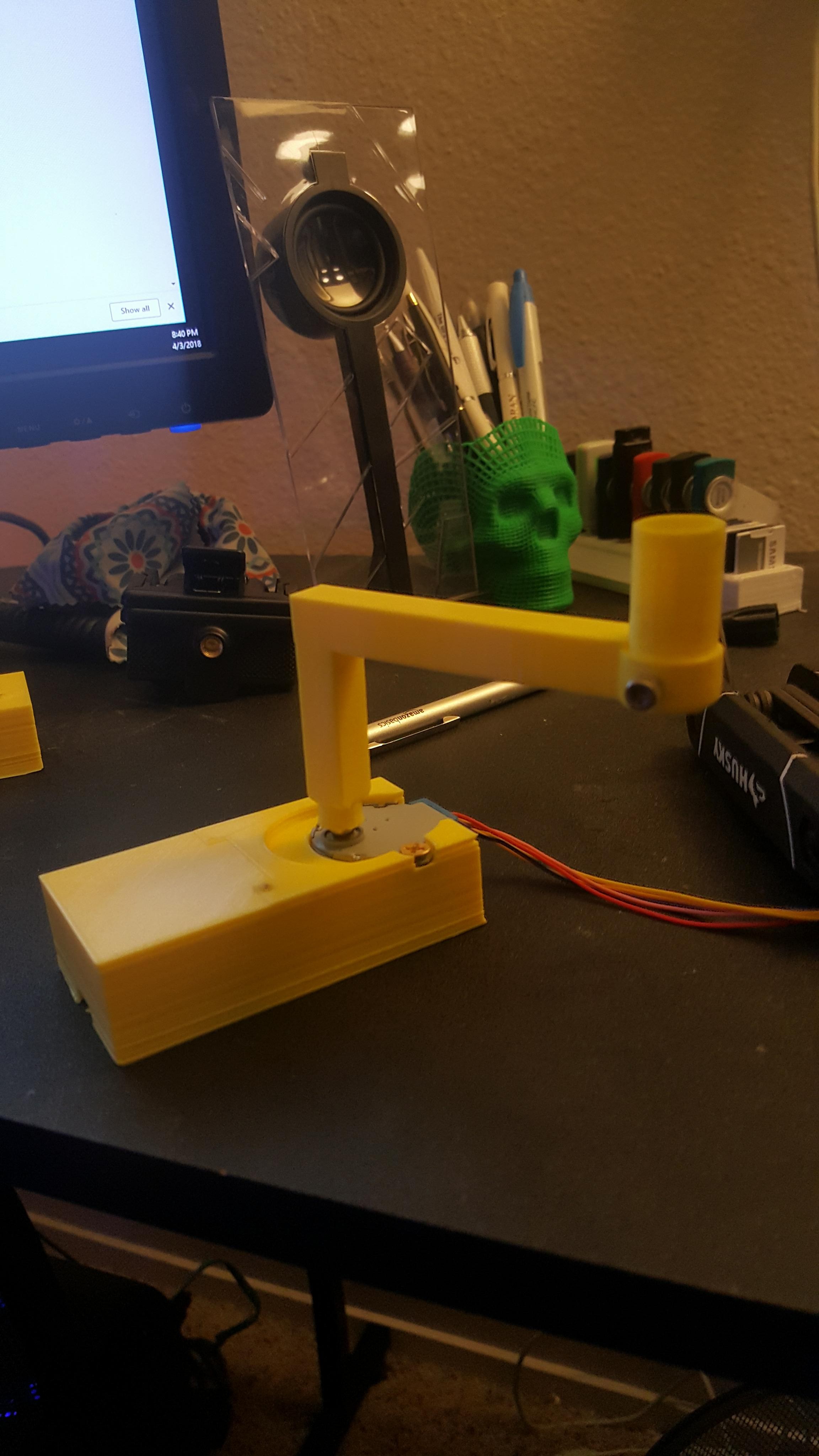
Шаг 3. Собираем все вместе
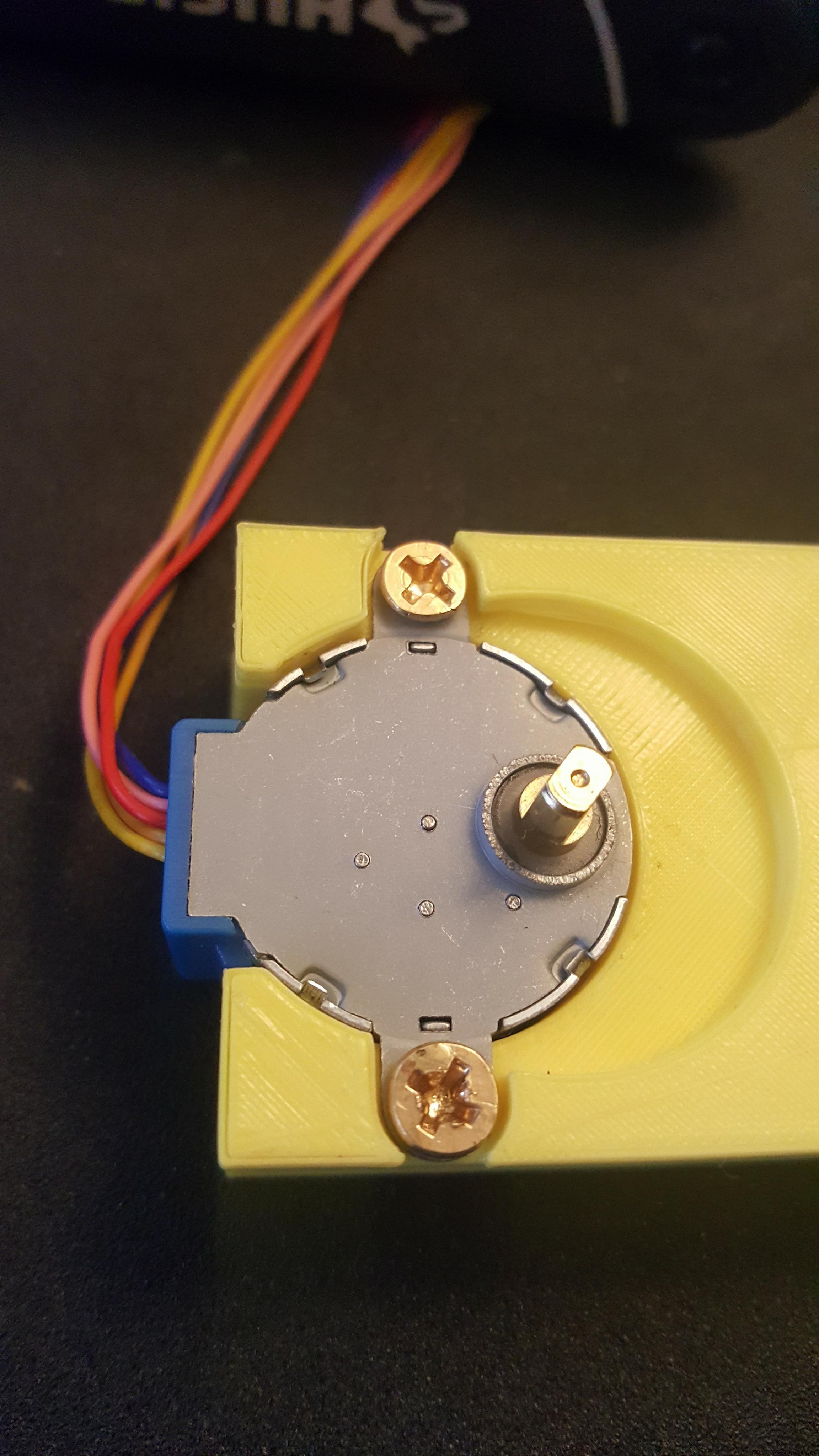
На данный момент у вас готовы все отдельные части, и нам просто нужно их объединить! Идите вперед и сначала поместите свой шаговый двигатель в основание Swiper. Я использовал два маленьких шурупа, чтобы закрепить его на 3D-принте.
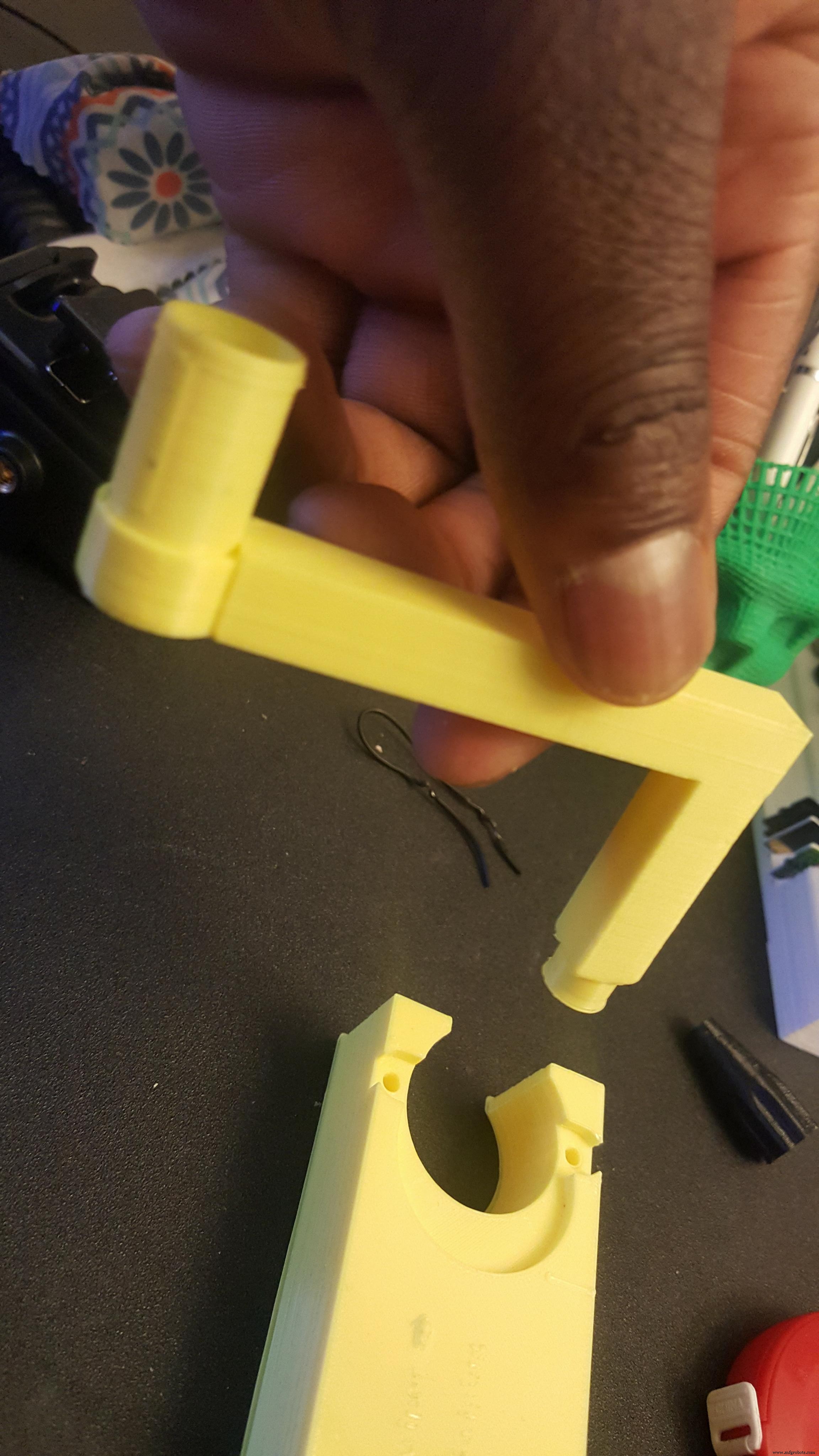
Затем поместите рукоятку переключателя на шаговый двигатель.
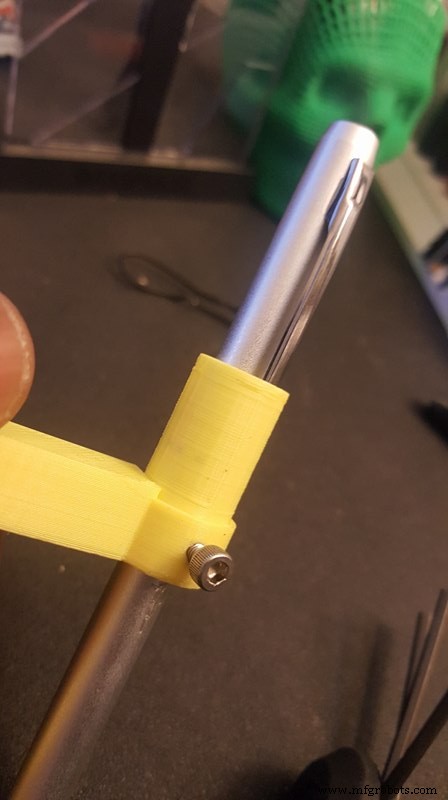
Чтобы откалибровать высоту; поместите всю конструкцию над телефоном и поместите перо для сенсорного экрана в ручку для сенсорного экрана, пока перо для сенсорного экрана не коснется экрана.

На этом этапе возьмите короткий винт M3 и закрепите перо для сенсорного экрана, чтобы оно не двигалось при касании.
Наконец-то получите перелистывание
Поместите всю конструкцию рядом с телефоном, откройте нужное приложение для знакомств, включите приложение Arduino и расслабьтесь!
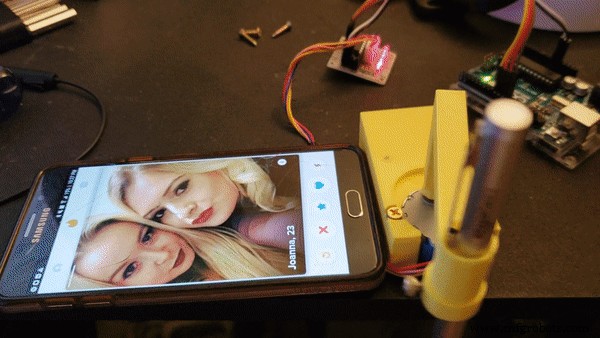
Я тестировал это на 4 разных телефонах, и на одном из телефонов возникли проблемы с правильной регистрацией свайпов, и он перешел на предыдущий экран. Это связано с тем, что край последнего протестированного телефона был довольно чувствительным, вы можете исправить это, поместив телефон в чехол с приподнятым краем, чтобы перо для сенсорного экрана не регистрировалось на краю экрана.
Код
- Swiper
Swiper Arduino
Измените Direction =false на true, если вы хотите изменить направление прокрутки! / * BYJ48 Код шагового двигателя Подключить:IN1>> D8 IN2>> D9 IN3>> D10 IN4>> D11 VCC>> 5V Gnd написано:Моханнад Равашдех https://www.instructables.com/member/Mohannad+Rawashdeh/ 28/9/2013 * / # define IN1 8 #define IN2 9 #define IN3 10 # define IN4 11int Steps =0; boolean Direction =false; // изменить значение на true для вправо unsigned long last_time; unsigned long currentMillis; int steps_left =4095; long time; void setup () {Serial.begin (115200); pinMode (IN1, OUTPUT); pinMode (IN2, ВЫХОД); pinMode (IN3, ВЫХОД); pinMode (IN4, ВЫХОД); // задержка (1000);} void loop () {while (steps_left> 0) {currentMillis =micros (); если (currentMillis-last_time> =1000) {шаговый (1); время =время + микросхемы () - last_time; last_time =micros (); steps_left--; }} steps_left =4095;} void stepper (int xw) {for (int x =0; x 7) {Steps =0;} if (Steps <0) {Steps =7; }} Производственный процесс
- Шаговые двигатели
- Интегрированные драйверы упрощают разработку шаговых двигателей
- Прототип Raspoulette
- Простой робот Pi
- Автономная турель Nerf Sentry
- Библиотека биполярных шаговых двигателей
- SmartWay
- Серая зона между серводвигателями и шаговыми двигателями
- Что такое линейный двигатель?
- Что такое серводвигатель?