


Программируемые логические контроллеры (ПЛК)
До появления полупроводниковых логических схем системы логического управления проектировались и строились исключительно на основе электромеханических реле. Реле далеко не устарели в современном дизайне, но они были заменены во многих из их прежних ролей в качестве устройств управления логическим уровнем, которые чаще всего используются в тех приложениях, где требуется переключение с высоким током и / или высоким напряжением.
Системы и процессы, требующие управления «включено-выключено», изобилуют современной торговлей и промышленностью, но такие системы управления редко строятся либо из электромеханических реле, либо из дискретных логических вентилей. Вместо этого цифровые компьютеры восполняют потребность, которая может быть запрограммирована выполнять множество логических функций.
История программируемых логических контроллеров
В конце 1960-х годов американская компания Bedford Associates выпустила вычислительное устройство, которое они назвали MODICON . . В сокращении это означало Мод . улар Ди gital Con troller, а позже стало названием подразделения компании, занимающегося разработкой, производством и продажей этих управляющих компьютеров специального назначения.
Другие инженерные фирмы разработали свои собственные версии этого устройства, и в конечном итоге оно стало известно на непатентованных терминах как ПЛК , или P программируемый L ogic C ontroller. Целью ПЛК было напрямую заменить электромеханические реле в качестве логических элементов, заменив вместо этого твердотельный цифровой компьютер с сохраненной программой, способной имитировать соединение многих реле для выполнения определенных логических задач.
Релейная логика и программирование ПЛК
ПЛК имеет множество «входных» клемм, через которые он интерпретирует «высокое» и «низкое» логические состояния от датчиков и переключателей. Он также имеет множество выходных клемм, через которые он выводит «высокий» и «низкий» сигналы для питания осветительных приборов, соленоидов, контакторов, небольших двигателей и других устройств, позволяющих управлять включением / выключением.
Чтобы упростить программирование ПЛК, их язык программирования был разработан так, чтобы напоминать схемы релейной логики. Таким образом, промышленный электрик или инженер-электрик, привыкший читать схемы релейной логики, будет чувствовать себя комфортно при программировании ПЛК для выполнения тех же функций управления.
ПЛК - это промышленные компьютеры, поэтому их входные и выходные сигналы обычно составляют 120 вольт переменного тока, как и электромеханические управляющие реле, на замену которым они были разработаны. Хотя некоторые ПЛК могут вводить и выводить низкоуровневые сигналы постоянного напряжения той величины, которая используется в схемах логических вентилей, это исключение, а не правило. Стандарты подключения сигналов и программирования несколько различаются между разными моделями ПЛК, но они достаточно похожи, чтобы дать здесь «общее» введение в программирование ПЛК.
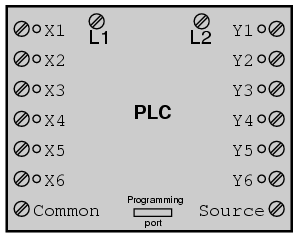
На следующем рисунке показан простой ПЛК, который может показаться на виде спереди. Две винтовые клеммы обеспечивают подключение к 120 В переменного тока для питания внутренних цепей ПЛК, обозначенных L1 и L2. Шесть винтовых клемм на левой стороне обеспечивают подключение к устройствам ввода, каждая клемма представляет отдельный входной «канал» с собственной меткой «X».
Левая нижняя винтовая клемма представляет собой «общее» соединение, которое обычно подключается к L2 (нейтрали) источника питания 120 В переменного тока.
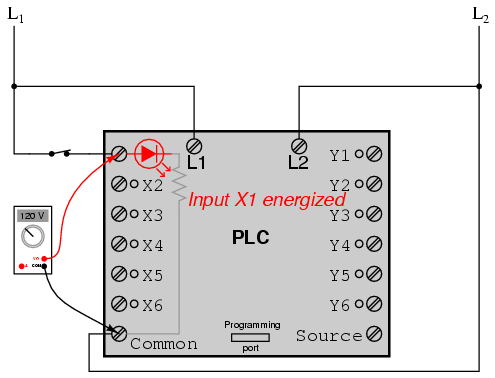
Внутри корпуса ПЛК, подключенного между каждой входной клеммой и общей клеммой, находится оптоизолирующее устройство (светоизлучающий диод), которое обеспечивает электрически изолированный «высокий» логический сигнал для схемы компьютера (фототранзистор интерпретирует свет светодиода. ) при подаче напряжения 120 В переменного тока между соответствующей входной клеммой и общей клеммой. Светодиодный индикатор на передней панели ПЛК визуально показывает, что вход находится под напряжением:
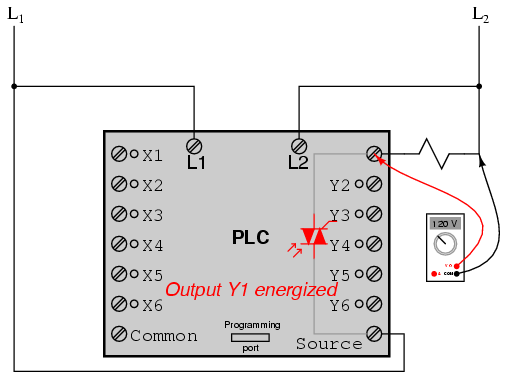
Выходные сигналы генерируются компьютерной схемой ПЛК, активирующей переключающее устройство (транзистор, симистор или даже электромеханическое реле), подключающее клемму «Источник» к любой из выходных клемм, помеченных буквой «Y-». Клемма «Источник», соответственно, обычно подключается к стороне L1 источника питания 120 В переменного тока. Как и в случае с каждым входом, индикаторный светодиод на передней панели ПЛК дает визуальную индикацию «активированного» выхода:
Таким образом, ПЛК может взаимодействовать с реальными устройствами, такими как переключатели и соленоиды. Фактическая логика системы управления устанавливается внутри ПЛК с помощью компьютерной программы. Эта программа определяет, какой выход будет активирован, при каких условиях входа.
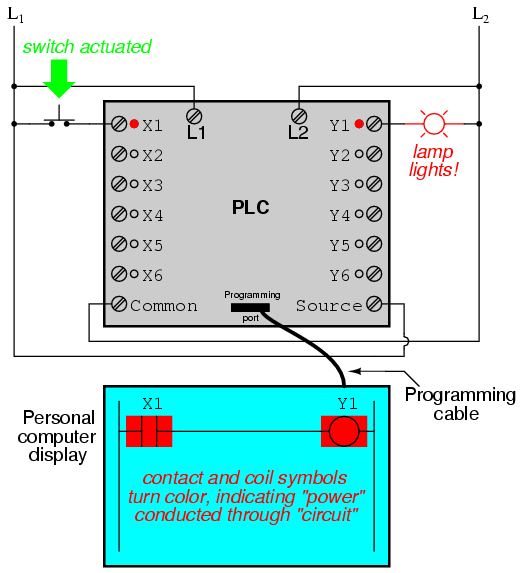
Хотя сама программа выглядит как диаграмма релейной логики с символами переключателей и реле, внутри ПЛК нет реальных контактов переключателей или катушек реле, которые бы создавали логические отношения между входом и выходом. Это воображаемые контакты и катушки, если хотите. Программа вводится и просматривается через персональный компьютер, подключенный к порту программирования ПЛК. Рассмотрим следующую схему и программу ПЛК:
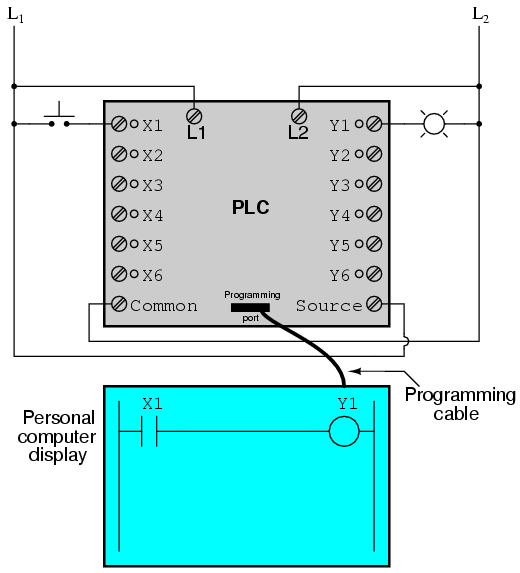
Когда кнопочный переключатель не задействован (не нажат), на вход X1 ПЛК не подается питание. Следуя программе, которая показывает нормально разомкнутый контакт X1 последовательно с катушкой Y1, на катушку Y1 не будет подаваться «питание». Таким образом, выход Y1 ПЛК остается обесточенным, а подключенная к нему индикаторная лампа остается темной.
Однако, если кнопочный переключатель нажат, питание будет отправлено на вход X1 ПЛК. Любые и все контакты X1, появляющиеся в программе, перейдут в активированное (ненормальное) состояние, как если бы они были контактами реле, активированными при подаче напряжения на катушку реле с именем «X1».
В этом случае подача напряжения на вход X1 приведет к тому, что нормально разомкнутый контакт X1 «замкнется», посылая «питание» на катушку Y1. Когда катушка Y1 программы «запитывается», активизируется реальный выход Y1, загорая подключенную к нему лампу:
Следует понимать, что контакт X1, катушка Y1, соединительные провода и «питание», отображаемые на дисплее персонального компьютера, являются виртуальными . . Они не существуют как настоящие электрические компоненты. Они существуют как команды в компьютерной программе - всего лишь часть программного обеспечения - которая просто напоминает настоящую принципиальную схему реле.
Не менее важно понимать, что персональный компьютер, используемый для отображения и редактирования программы ПЛК, не нужен для непрерывной работы ПЛК. После того, как программа была загружена в ПЛК с персонального компьютера, персональный компьютер может быть отключен от ПЛК, и ПЛК продолжит выполнять запрограммированные команды.
Я включил дисплей персонального компьютера в эти иллюстрации только для вас, чтобы помочь понять взаимосвязь между реальными условиями (замыкание переключателя и состояние лампы) и состоянием программы («питание» через виртуальные контакты и виртуальные катушки).
Поведение системы управления
Истинная мощность и универсальность ПЛК раскрывается, когда мы хотим изменить поведение системы управления. Поскольку ПЛК является программируемым устройством, мы можем изменить его поведение, изменив команды, которые мы ему даем, без необходимости перенастраивать электрические компоненты, подключенные к нему.
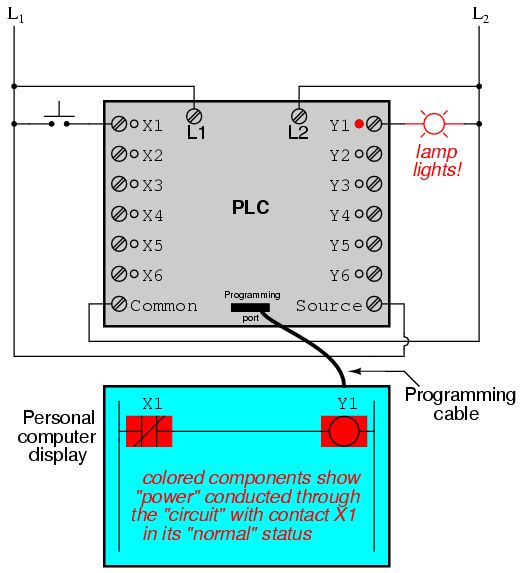
Например, предположим, что мы хотим заставить эту схему переключателя и лампы работать перевернутым образом:нажмите кнопку, чтобы лампа погасла выключением , и отпустите, чтобы он включился . «Аппаратное» решение потребовало бы, чтобы нормально замкнутый кнопочный переключатель был заменен нормально разомкнутым переключателем, находящимся в настоящее время на месте. «Программное» решение намного проще:просто измените программу так, чтобы контакт X1 был нормально замкнутым, а не нормально разомкнутым.
На следующем рисунке показана измененная система в состоянии, когда кнопка не задействована ( не нажатие):
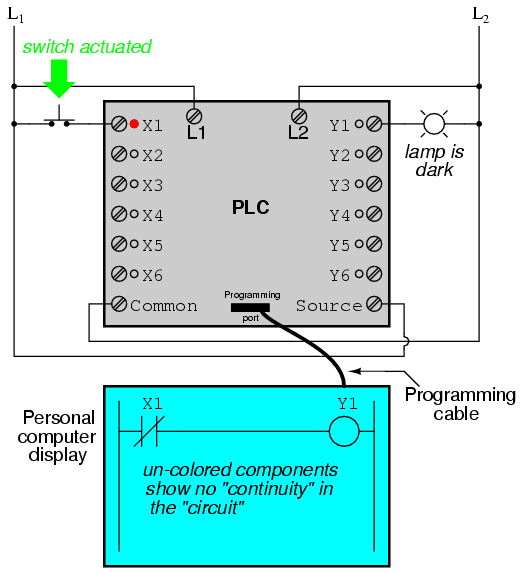
На следующем рисунке переключатель показан включенным (нажатым):
Одним из преимуществ реализации логического управления в программном обеспечении, а не в оборудовании, является то, что входные сигналы можно повторно использовать в программе столько раз, сколько необходимо. Например, возьмем следующую схему и программу, предназначенную для включения лампы, если одновременно задействованы как минимум два из трех кнопочных переключателей:
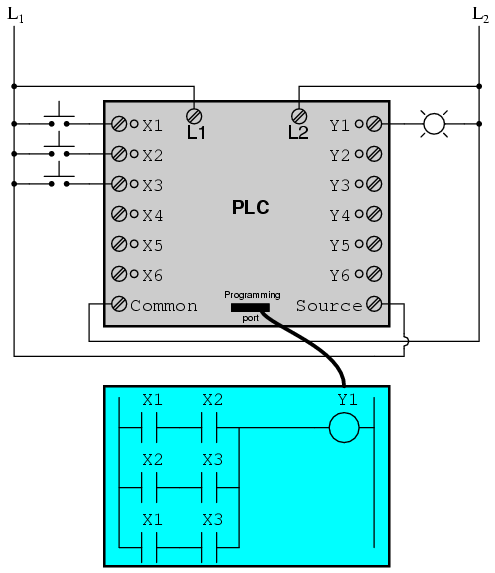
Чтобы построить эквивалентную схему с использованием электромеханических реле, необходимо использовать три реле с двумя нормально разомкнутыми контактами каждое, чтобы обеспечить два контакта на входной переключатель. Однако с помощью ПЛК мы можем запрограммировать столько контактов, сколько захотим, для каждого входа «X» без добавления дополнительного оборудования, поскольку каждый вход и каждый выход представляют собой не что иное, как один бит в цифровой памяти ПЛК (либо 0, либо 1). , и его можно вызывать столько раз, сколько необходимо.
Более того, поскольку каждый выход в ПЛК - это не что иное, как бит в его памяти, мы можем назначить контакты в программе ПЛК, «активируемые» состоянием выхода (Y). Возьмем, к примеру, следующую систему, схему управления пуском-остановом двигателя:
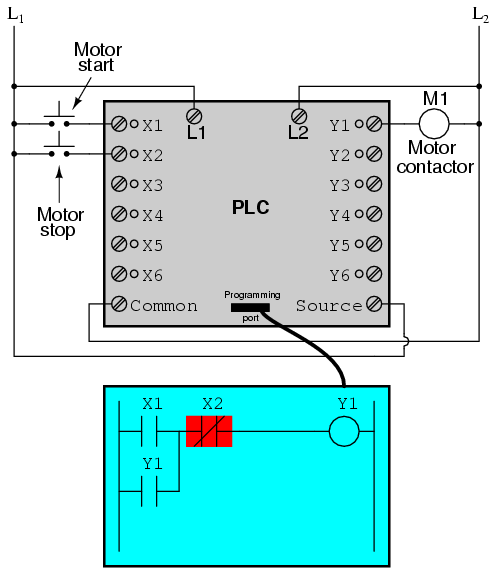
Кнопочный переключатель, подключенный к входу X1, служит переключателем «Пуск», а переключатель, подключенным к входу X2, служит переключателем «Стоп». Другой контакт в программе, названный Y1, напрямую использует состояние выходной катушки в качестве герметичного контакта, так что контактор двигателя будет продолжать находиться под напряжением после отпускания кнопочного переключателя «Пуск». Вы можете увидеть, что нормально замкнутый контакт X2 появляется в цветном блоке, показывая, что он находится в замкнутом («электрически проводящем») состоянии.
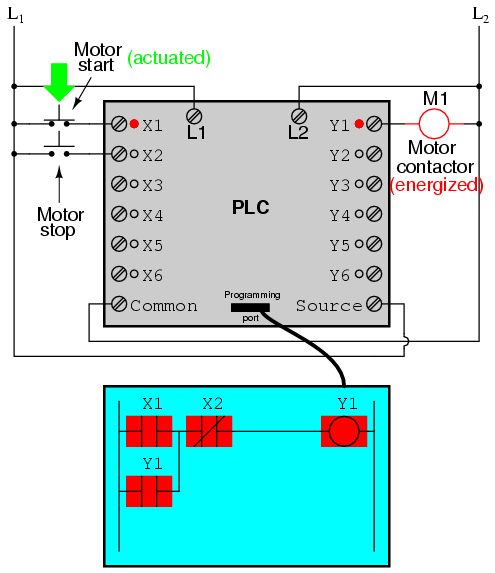
Если бы мы нажали кнопку «Пуск», вход X1 включился бы, таким образом, «замкнув» контакт X1 в программе, посылая «питание» на «катушку» Y1, запитав выход Y1 и подав напряжение переменного тока 120 В на катушка контактора реального двигателя. Параллельный контакт Y1 также «замкнется», тем самым заблокировав «цепь» под напряжением:
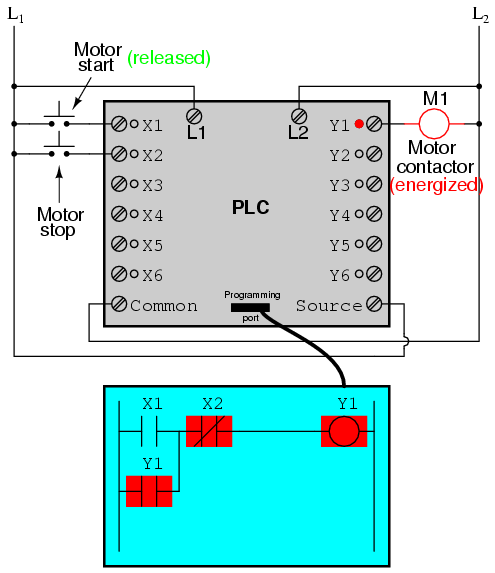
Теперь, если мы отпустим кнопку «Пуск», нормально разомкнутый «контакт» X1 вернется в свое «разомкнутое» состояние, но двигатель будет продолжать работать, потому что герметичный «контакт» Y1 продолжает обеспечивать «непрерывность». «запитать» катушку Y1, таким образом удерживая выход Y1 под напряжением:
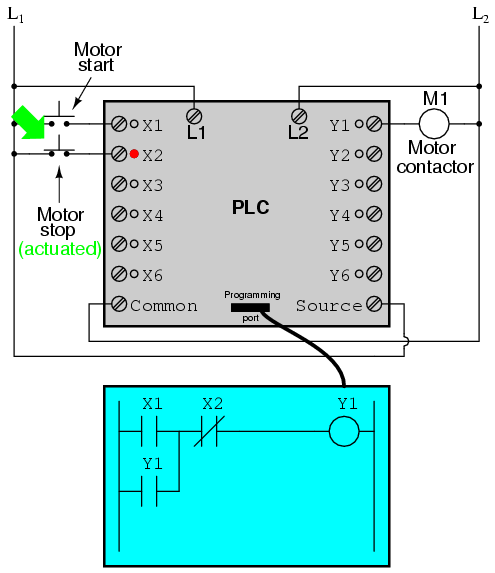
Чтобы остановить двигатель, мы должны на мгновение нажать кнопку «Стоп», которая активирует вход X2 и «разомкнет» нормально замкнутый «контакт», нарушив целостность «катушки» Y1:
Когда кнопка «Стоп» отпускается, вход X2 обесточивается, возвращая «контакт» X2 в нормальное, «замкнутое» состояние. Двигатель, однако, не запустится снова, пока не будет нажата кнопка «Пуск», потому что «опломбирование» Y1 было потеряно:
Отказоустойчивый дизайн в системах с ПЛК
Здесь важно отметить, что отказоустойчивый Дизайн так же важен в системах, управляемых ПЛК, как и в системах с электромеханическим релейным управлением. Всегда следует учитывать влияние неисправной (разомкнутой) проводки на управляемое устройство или устройства. В этом примере схемы управления двигателем у нас есть проблема:если бы входная проводка для X2 (переключатель «Стоп») вышла из строя при отказе, то не было бы возможности остановить двигатель!
Решением этой проблемы является изменение логики между «контактом» X2 внутри программы ПЛК и фактическим кнопочным переключателем «Стоп»:
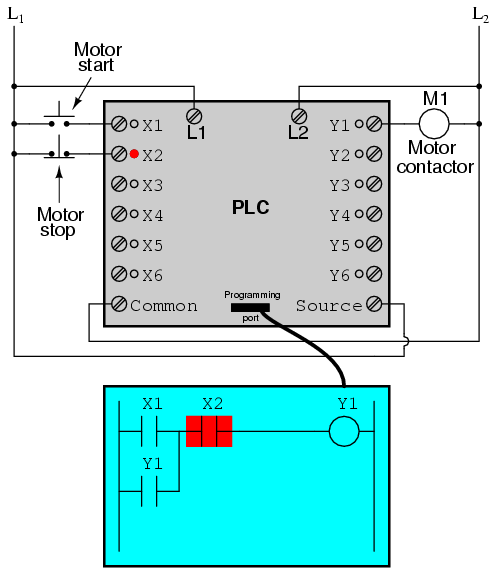
Когда нормально замкнутый кнопочный переключатель «Стоп» не сработал (не нажат), на вход X2 ПЛК будет подано напряжение, тем самым «замкнув» «контакт» X2 внутри программы. Это позволяет запускать двигатель, когда на вход X1 подано напряжение, и позволяет ему продолжать работу, когда кнопка «Пуск» больше не нажимается. Когда нажимается кнопка «Стоп», вход X2 обесточивается, таким образом «размыкая» «контакт» X2 внутри программы ПЛК и выключая двигатель.
Итак, мы видим, что между этим новым дизайном и предыдущим дизайном нет никакой функциональной разницы. Однако, если входная проводка на входе X2 при отказе размыкается, вход X2 будет обесточен так же, как при нажатии кнопки «Стоп». Таким образом, в результате неисправности проводки на входе X2 двигатель немедленно отключается.
Это более безопасная конструкция, чем показанная ранее, где отказ проводки переключателя «Стоп» привел бы к неработоспособности выключить мотор. В дополнение к входным (X) и выходным (Y) программным элементам, ПЛК имеют «внутренние» катушки и контакты без внутренней связи с внешним миром. Они используются почти так же, как «управляющие реле» (CR1, CR2 и т. Д.), Используемые в стандартных релейных цепях:для обеспечения инверсии логического сигнала при необходимости.
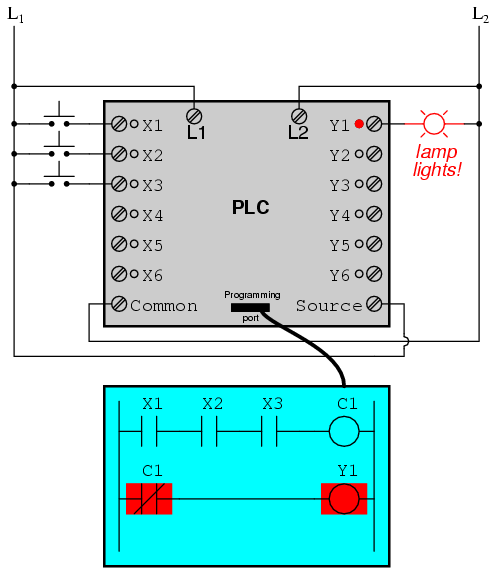
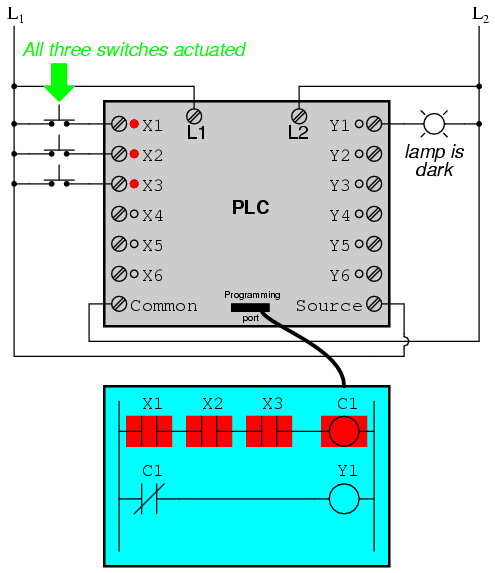
Чтобы продемонстрировать, как можно использовать одно из этих «внутренних» реле, рассмотрим следующий пример схемы и программы, разработанные для имитации функции трехвходового логического элемента И-НЕ. Поскольку программные элементы ПЛК обычно обозначаются отдельными буквами, я назову внутреннее управляющее реле «C1», а не «CR1», как это принято в схеме управления реле:
В этой схеме лампа будет гореть, пока любой кнопок остаются неактивированными (не нажатыми). Чтобы лампа погасла, нам нужно будет активировать (нажать) все три переключателя, вот так:
Расширенная функциональность ПЛК
Этот раздел, посвященный программируемым логическим контроллерам, иллюстрирует лишь небольшой пример их возможностей. Как компьютеры, ПЛК могут выполнять функции синхронизации (для эквивалента реле с временной задержкой), последовательность барабанов и другие расширенные функции с гораздо большей точностью и надежностью, чем это возможно при использовании электромеханических логических устройств. Большинство ПЛК могут иметь более шести входов и шести выходов. На следующей фотографии показаны несколько модулей ввода и вывода одного ПЛК Allen-Bradley.

Поскольку каждый модуль имеет шестнадцать «точек» ввода или вывода, этот ПЛК может контролировать и управлять десятками устройств. ПЛК, помещающийся в шкаф управления, занимает мало места, особенно с учетом эквивалентного пространства, которое потребуется электромеханическим реле для выполнения тех же функций:

Удаленный мониторинг и управление ПЛК через цифровые компьютерные сети
Одно из преимуществ ПЛК, которое просто не может дублироваться электромеханическими реле - дистанционный контроль и управление через цифровые компьютерные сети. Поскольку ПЛК - это не что иное, как цифровой компьютер специального назначения, он может довольно легко обмениваться данными с другими компьютерами. На следующей фотографии показан персональный компьютер, отображающий графическое изображение реального процесса на уровне жидкости (насосная или «подъемная» станция для городской системы очистки сточных вод), управляемая ПЛК.
Фактическая насосная станция находится в нескольких милях от дисплея персонального компьютера:

Промышленные технологии