


Как решить, какой робот лучше всего подходит для визуализации рабочего пространства
Как узнать, подойдет ли робот для решения вашей задачи, еще до того, как вы его купите?
Даже когда вы сузили свой выбор по всем обычным спецификациям и показателям, у вас все еще могут быть некоторые мучительные сомнения.
Не будет ли робот настолько большим, что не уместится в отведенном для него пространстве?
Если вы возьмете с собой робота меньшего размера, сможет ли он добраться до всех областей, которые вам нужны для выполнения задачи?
Есть ли способ оптимизировать размер робота, чтобы добиться максимальной эффективности?
Прежде чем купить конкретного робота, трудно сказать, каково будет, если он будет находиться рядом с вами на вашем объекте. Вы можете смотреть все видео на YouTube, которые вам нравятся, читать все технические описания и даже смотреть на других роботов в чужих помещениях…
Не видя, как робот впишется в вашу конкретную задачу, иногда это может закончиться игрой в угадайку. Вы делаете столько вычислений, сколько можете, а затем просто надеетесь.
Или вы решили проявить излишнюю консервативность и уступили огромное пространство роботу, которому оно не нужно.
Возможно, вы уже ознакомились с нашим Руководством по выбору робота для производства.
Вы определили, какой тип робота вам нужен, какой рабочий орган и какие аксессуары. Вы сузили свои варианты до выбора роботов на основе их полезной нагрузки и воспроизводимости. И вы использовали наши инструменты, чтобы выбрать охват, который кажется более или менее разумным.
Но вы все еще не можете представить себе все пространство, которое будет занимать каждый робот.
Почему сложно представить, сколько места займет робот
Проблема с роботами в том, что они очень динамичны.
Например, с помощью станка с ЧПУ вы можете подойти к станку на выставке и точно увидеть, сколько места он займет на вашем рабочем месте. Полный размер машины рассчитать несложно — в основном это большой прямоугольный параллелепипед.
С роботом место, которое он занимает, не так просто. Помимо физических размеров самого робота, он также занимает расширенное пространство, содержащее все места, которых концевой эффектор робота достигает при движении робота. Это называется «рабочее пространство» робота.
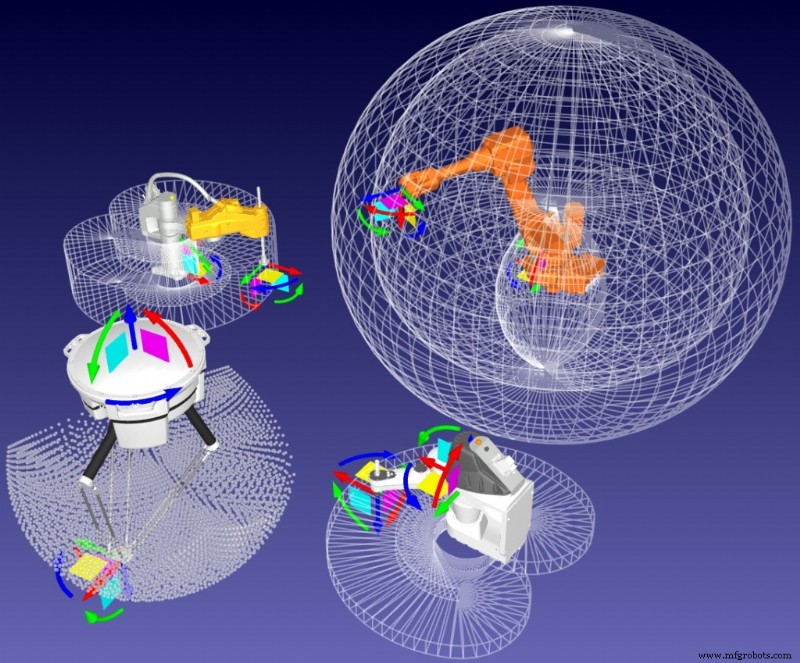
Большинство промышленных роботов с 6 степенями свободы имеют рабочее пространство, напоминающее сферу. Дельта-роботы имеют сложное рабочее пространство, которое выглядит как трехмерная дуга. Роботы SCARA имеют цилиндрическое рабочее пространство.
Просто взглянув на робота, сложно сказать, как будет выглядеть его рабочее пространство.

Как вы можете гарантировать, что робот, которого вы рассматриваете, будет иметь рабочее пространство, соответствующее вашим потребностям?
Визуализация рабочего пространства поможет вам принять правильное решение
К счастью, есть способ легко увидеть рабочее пространство робота и узнать, как оно повлияет на вашу конкретную задачу.
И вы можете сделать это еще до того, как выберете робота, которого хотите приобрести.
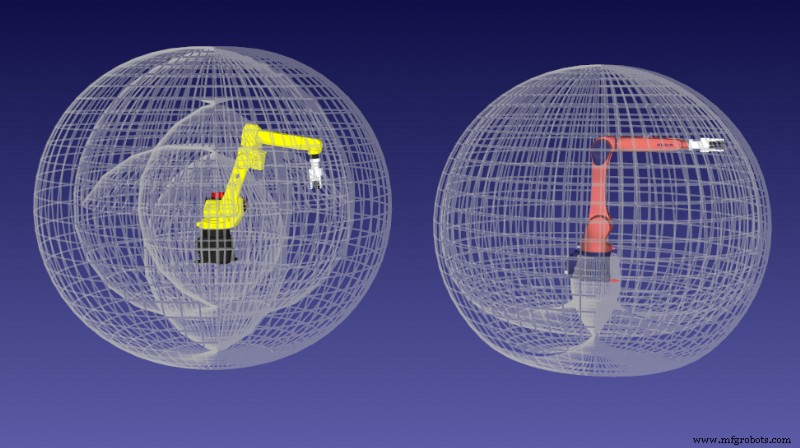
Визуализация рабочей области — это инструмент, который позволяет визуализировать внешние границы рабочей области робота в виде трехмерной формы. В RoboDK это пространство отображается серым контуром вокруг смоделированной модели робота.
Вы можете использовать эту функцию, чтобы принять решение о том, какой робот лучше всего подходит для вашей задачи.
Создавая виртуальный макет своего приложения, вы можете быстро переключаться между различными моделями роботов (без необходимости программировать саму задачу) и использовать функцию визуализации рабочего пространства, чтобы увидеть, будет ли каждый конкретный робот наилучшим образом соответствовать вашим потребностям.
После того, как вы нашли робота, который подходит для этой задачи — исходя из его рабочего пространства — вы можете запрограммировать приложение в симуляторе, чтобы убедиться, что выбранный вами робот действительно сможет выполнять работу.
Как работает визуализация рабочей области
Когда вы смотрите на техническое описание робота, вы обычно видите базовое графическое представление рабочего пространства этого робота. Обычно он состоит из одного вида сбоку и одного вида сверху робота.
Такие изображения полезны, но недостаточно.
Визуализация рабочего пространства — это, по сути, 3D-версия таких изображений. Он создается путем алгоритмического перемещения всех суставов робота через все возможные положения и преобразования полученного положения концевого эффектора в трехмерную форму.
Поскольку расчет выполняется в 3D, это дает вам гораздо более целостное представление о возможностях конкретного робота, чем если бы вы просто посмотрели техническое описание робота.
Влияние добавления конечного эффектора
Изменения, которые вы вносите в робота, иногда также влияют на его рабочее пространство. Например, когда вы добавляете концевой эффектор, размеры этого конечного эффектора изменят размер, а иногда и форму рабочей области. В RoboDK вы можете выбрать отображение рабочего пространства робота с конечным эффектором или без него.
Всякий раз, когда вы добавляете концевой эффектор к своему роботу, рекомендуется использовать функцию визуализации рабочего пространства, чтобы увидеть, как это повлияет на рабочее пространство робота.
Как начать работу с визуализацией рабочего пространства
С RoboDK очень легко использовать визуализацию рабочего пространства, чтобы помочь вам принять решение о покупке робота.
Вот шаги для просмотра рабочей области любого конкретного робота:
- Загрузите модель робота в RoboDK из нашей обширной библиотеки роботов.
- Откройте панель свойств робота, щелкнув его правой кнопкой мыши в дереве программы.
- Перейдите в раздел WorkSpace и выберите либо просмотр рабочего пространства самого робота (со стороны его фланца), либо с прикрепленным текущим инструментом.
- Теперь вы увидите рабочее пространство робота, визуализированное вокруг самого робота.
Конечно, вы не ограничены просмотром только одного рабочего пространства робота за раз. Вы можете загрузить несколько роботов в симуляцию и сравнить их рабочие пространства рядом друг с другом.
Это может быть полезно, когда вы пытаетесь выбрать между двумя разными моделями роботов. Но это также может быть полезно, когда вы используете несколько роботов для выполнения одной задачи и хотите выяснить, как их рабочие области могут взаимодействовать и перекрываться.
Как визуализация рабочего пространства может помочь в развертывании вашего робота? Расскажите нам в комментариях ниже или присоединитесь к обсуждению в LinkedIn, Twitter, Facebook, Instagram или на форуме RoboDK.
Промышленный робот
- Какие промышленные роботы для покраски работают лучше всего?
- 10 лучших производителей роботов SCARA
- Как решить, какая инжиниринговая компания вам подходит
- Бесплатное обучение роботов с RoboDK
- Роботизированное бурение 101:как развернуть систему роботизированного бурения
- Как Голливуд делает потрясающий реквизит с помощью роботизированного фрезерования
- 10 приемов для достижения наилучших результатов при роботизированной сварке
- Как убедить руководство согласиться на роботизированную обработку
- Как начать программирование роботов Yaskawa
- Калибровка робота:какие детали необходимо откалибровать?