


Arduino / Android - управление несколькими сервомоторами по BLUETOOTH
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Об этом проекте

Привет мир! Вчера я сделал 1 приложение для сервоуправления и сказал, что сделаю мультиуправление, так что вот приложение для мультиуправления! Я также улучшил код Arduino. Следуйте следующему шагу для схемы, кода, списка деталей и приложения.
Установите приложение: GOOGLE PLAY
Свяжитесь со мной, если вам нужен исходный код!
Шаг 1. Список деталей
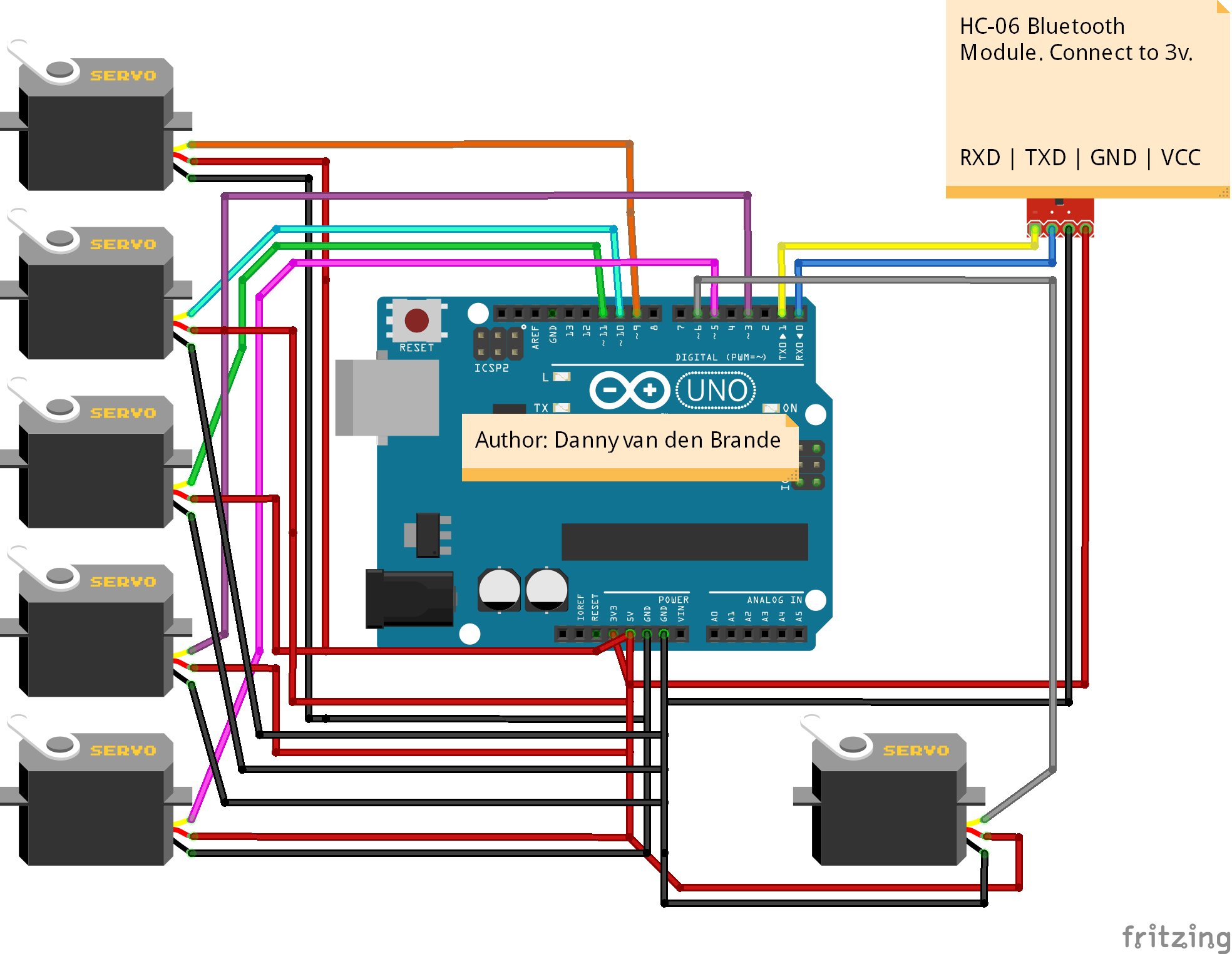
Подключите все, как показано на схеме, загрузите код, загрузите приложение, подключите Bluetooth после сопряжения устройств, и все должно работать. Обязательно подключите RXD к TX и TXD к RX.
Также убедитесь, что НЕ подключаете модуль Bluetooth при загрузке.
Список деталей:
- Arduino Uno ( Используйте Mega, если вы хотите использовать более 6 сервоприводов!) Я использовал RobotDyn Uno.
- Bluetooth-модуль HC-06 или любой другой.
- 6 серводвигателей. ( Можно протестировать, конечно, от одного до )
- Комплект перемычек MM / FF / MF
- Телефон Android.
Удачи!
Следуйте следующему шагу, чтобы узнать, как изменить имя, вывод и скорость передачи в модуле Bluetooth. ( необязательно )
Шаг 2:Как изменить название вашего HC-06
Что нужно?
- 1 программатор микроконтроллера USB на TTL для подключения к HC-06
Как подключить Программатор?
- VCC в VCC
- GND на GND
- RXD в TX
- TXD в RX
Приступим:
- Подключите программатор USB TTL к HC-06.
- Подключите USB и откройте Arduino IDE.
- Откройте монитор последовательного порта.
- Введите "AT" без кавычек. На мониторе последовательного порта вы должны увидеть ответ «ОК».
- Введите "AT + NAMExyz". Устанавливает имя модуля на «xyz» (замените xyz на нужное имя.) Ответ должен быть OKsetname.
- Введите "AT + PIN1234". Устанавливает контакт на 1234 (замените 1234 на желаемый), ответ должен быть OKsetPIN. Для получения дополнительной информации об изменении скорости передачи данных и т. Д. Я включил файл PDF. Удачи!
Код
- BLUETOOTH_Servo_Control_Multi_Servo.ino
BLUETOOTH_Servo_Control_Multi_Servo.ino Arduino
Код для управления несколькими сервоприводами./ * Автор:Дэнни ван ден Бранде. С помощью этого кода вы можете управлять несколькими сервомоторами с помощью приложения для Android. Вы можете добавлять их сколько угодно, пока ваши штифты не закончатся. Вы можете добавить больше сервоприводов в код. Если вам нужен источник приложения, просто свяжитесь со мной. * / # includeServo myservo1, myservo2, myservo3, myservo4, myservo5, myservo6, myservo7, myservo8, myservo9, myservo10; byte serialA; void setup () {myservo1.attach (9); myservo2.attach (10); myservo3.attach (11); myservo4.attach (3); myservo5.attach (5); myservo6.attach (6); // myservo7.attach (); введите номера контактов, если вы используете более 6 сервоприводов, я оставил их пустыми // myservo8.attach (); // myservo9.attach (); // myservo10.attach (); Serial.begin (9600); // при необходимости измените скорость передачи на скорость модуля Bluetooth.} Void loop () {if (Serial.available ()> 2) {serialA =Serial.read (); Serial.println (serialA );} {unsigned int servopos =Serial.read (); беззнаковое int servopos1 =Serial.read (); беззнаковое int realservo =(servopos1 * 256) + servopos; Serial.println (реальный резервуар); если (реальный резервуар> =1000 &&реальный резервуар <1180) {int servo1 =реальный резервуар; servo1 =map (servo1, 1000,1180,0,180); myservo1.write (servo1); Serial.println ("серво 1 ВКЛ"); задержка (10); } если (реальный резервуар> =2000 &&реальный резервуар <2180) {int servo2 =реальный резервуар; servo2 =map (servo2,2000,2180,0,180); myservo2.write (servo2); Serial.println ("серво 2 включен"); задержка (10); } если (реальный резервуар> =3000 &&реальный резервуар <3180) {int servo3 =реальный резервуар; servo3 =map (servo3, 3000, 3180,0,180); myservo3.write (servo3); Serial.println ("сервопривод 3 включен"); задержка (10); } если (реальный резервуар> =4000 &&реальный резервуар <4180) {int servo4 =реальный резервуар; servo4 =карта (servo4, 4000, 4180,0,180); myservo4.write (servo4); Serial.println ("сервопривод 4 включен"); задержка (10); } если (реальный резервуар> =5000 &&реальный резервуар <5180) {int servo5 =реальный резервуар; servo5 =карта (servo5, 5000, 5180,0,180); myservo5.write (серво5); Serial.println ("серво 5 включен"); задержка (10); } если (реальный резервуар> =6000 &&реальный резервуар <6180) {int servo6 =реальный резервуар; servo6 =карта (servo6, 6000, 6180,0,180); myservo6.write (servo6); Serial.println ("серво 6 включен"); задержка (10); } // if (realservo> =7000 &&realservo <7180) {// НЕКОМЕНДУЕМ при использовании более 6 сервоприводов. // int servo7 =realservo; // servo7 =map (servo7, 7000, 7180,0,180); // myservo7 .write (servo7); // Serial.println ("servo 7 On"); // delay (10); //} //// if (realservo> =8000 &&realservo <8180) {// int servo8 =realservo; // servo8 =map (servo8, 8000, 8180,0,180); // myservo8.write (servo8); // Serial.println ("servo 8 On"); // delay (10); //} / /// if (realservo> =9000 &&realservo <9180) {// int servo8 =realservo; // servo8 =map (servo9, 9000, 9180,0,180); // myservo8.write (servo8); // Последовательный. println ("servo 9 On"); // delay (10); //} //// if (realservo> =10000 &&realservo <10180) {// int servo10 =realservo; // servo10 =map (servo10, 10000, 10180,0,180); // myservo10.write (servo10); // Serial.println ("servo 10 On"); // delay (10); //}}}
Схема
Производственный процесс
- Простой робот Pi
- Универсальный пульт дистанционного управления с использованием Arduino, 1Sheeld и Android
- Центр управления Arduino
- Игрушка под управлением Android с использованием Raspberry Motor Shield
- Робот с сервомотором избегает препятствий
- Arduino с Bluetooth для управления светодиодом!
- Управление увлажнителем Arduino
- Управление серводвигателем с помощью Arduino и MPU6050
- Что такое серводвигатель?
- Что такое редуктор серводвигателя?