


Робот-автомобиль, управляемый болтами
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Приложения и онлайн-сервисы
 |
| |||
 |
|
Об этом проекте
Заявление об ограничении ответственности:
Во время работы над этим проектом электроника не была повреждена.
Акт первый:В один прекрасный день ...
Мы работали с утра, и у нас в руках оставалось много документации и тестирования кода, и нам отчаянно нужен был перерыв, но игра в настольный футбол не была идеальной, так как это выбивало бы нас из зоны ответственности. Поэтому, чтобы сохранить самообладание, мы начали думать о том, что мы можем сделать, чтобы расслабить нас, но при этом удерживать в этой «зоне работы». Тогда наш менеджер предложил:«Почему бы тебе не сделать небольшой проект и не выложить его на Hackster?». Что ж, добрый звонок, Пранав.
Поэтому мы решили создать управляемого через Интернет RC-робота с крошечной бонусной функцией (которую мы расскажем позже, потому что ожидание очень важно).

Хорошо, так что нас накачали, и мы бросились в строительный магазин.
Акт второй:лес оборудования
Мы приходим в строительный магазин, он заполнен наборами и компонентами, которые заставляют ваши глаза сиять жадностью, ваши руки будут тянуться к ним, и, прежде чем вы это узнаете, вы будете паять детали, чтобы сделать 8-битный калькулятор, но мы были сосредоточены и не позволяли этим отвлекающим факторам заставлять нас, и мы просто схватили то, что нам было нужно (вы тоже должны)
1. Болт-модуль Wi-Fi

2. Базовый роботизированный комплект

3. Arduino UNO или Boltduino


4. L298N Щиток драйвера двигателя

5. Датчик приближения

6. Проволочные перемычки

7. Адаптер питания

Акт третий:ковка
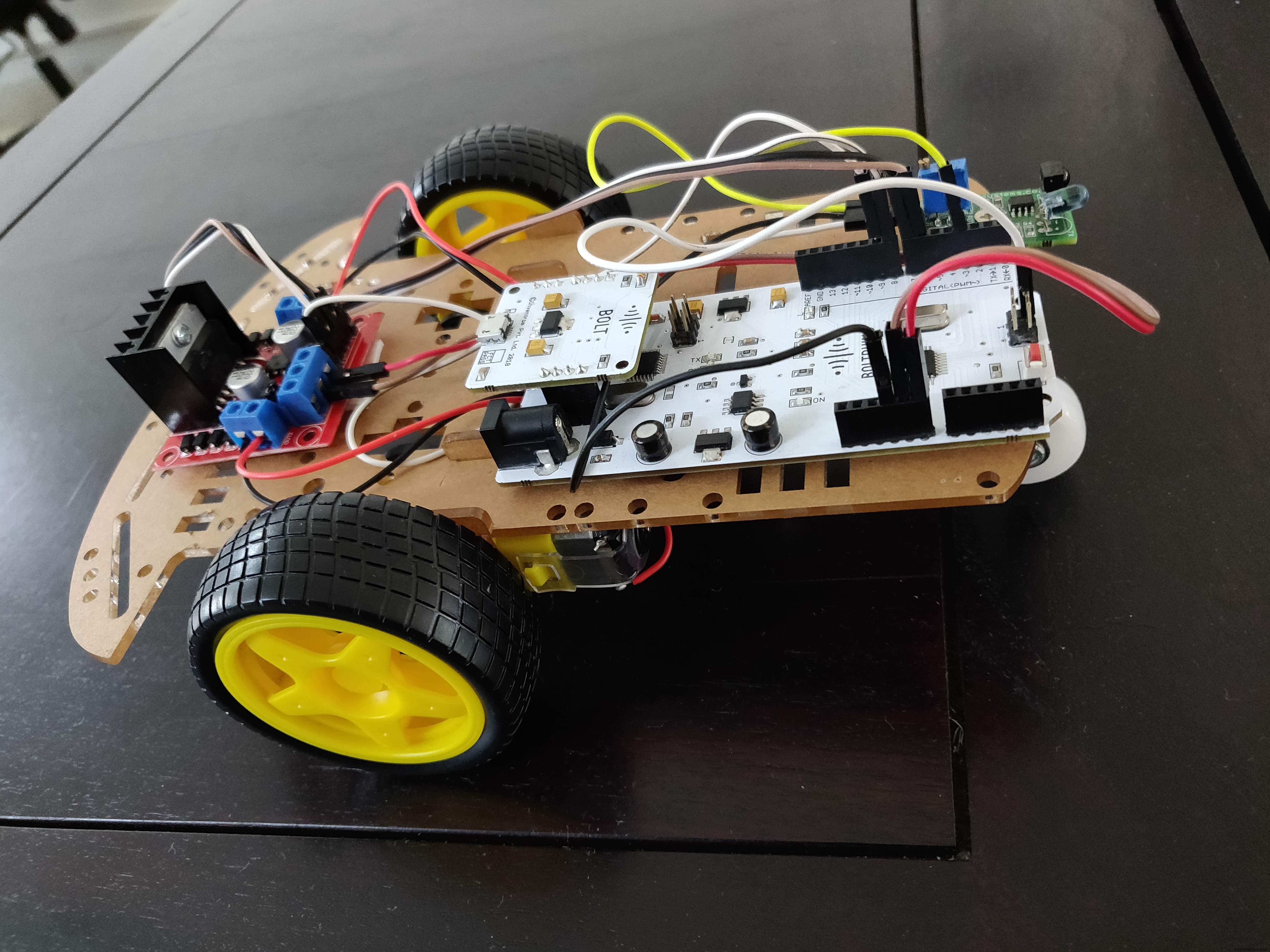
Мы благополучно вернулись из Леса оборудования со всеми необходимыми деталями. Пришло время Девашишу, верховному лорду оборудования, применить свою магию и собрать этого маленького робота.

Вот как он это сделал.
Сборка оборудования
1. Прикрепите самоустанавливающееся колесо к передней средней части шасси, как показано.
2. Соберите шасси автомобиля-робота и прикрепите два двигателя постоянного тока с помощью гаек и болтов вместе с предоставленными колесами, как показано.
ПРИМЕЧАНИЕ. Припаяйте провода к клемме двигателя, прежде чем прикреплять его к шасси.
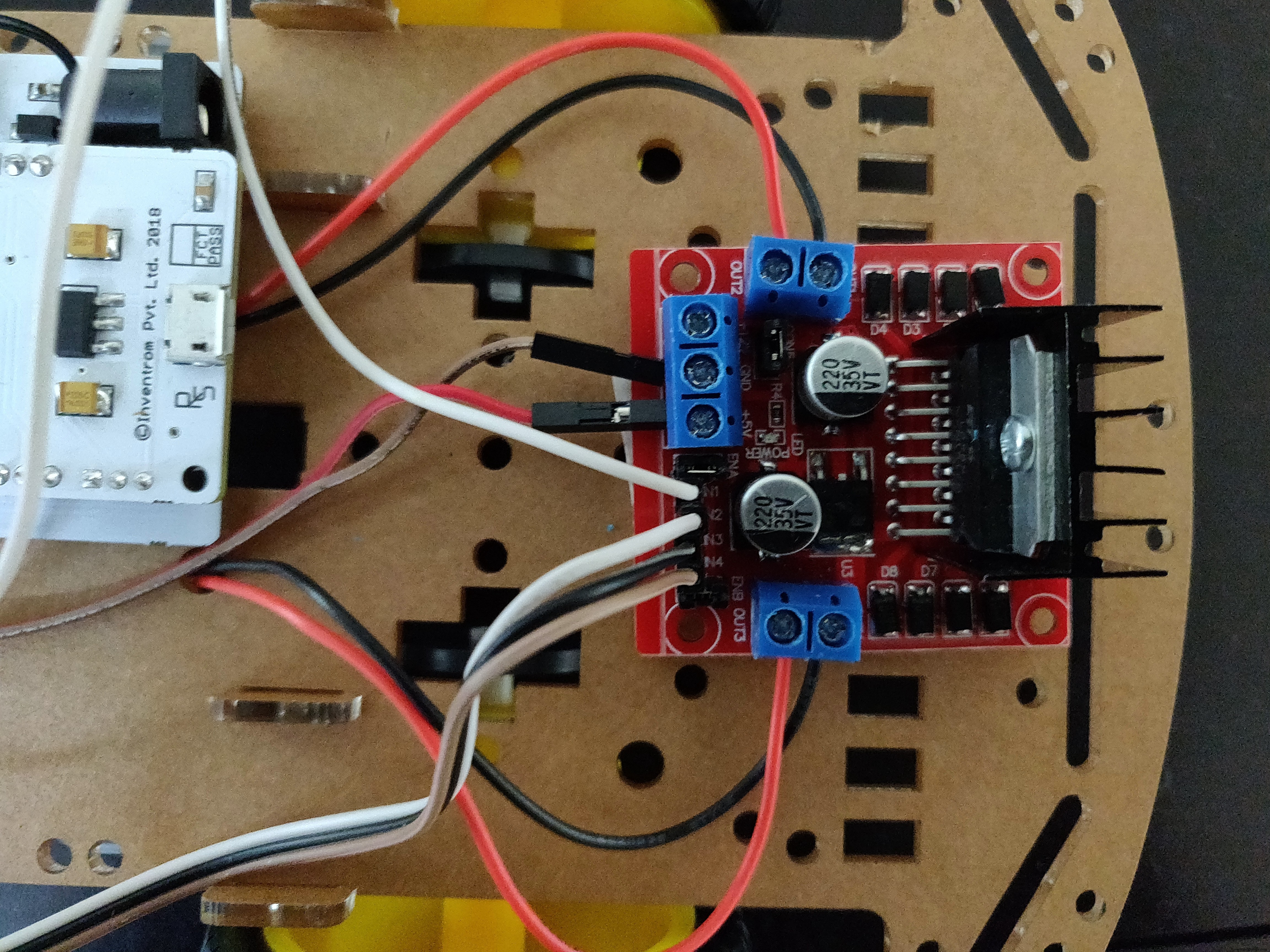
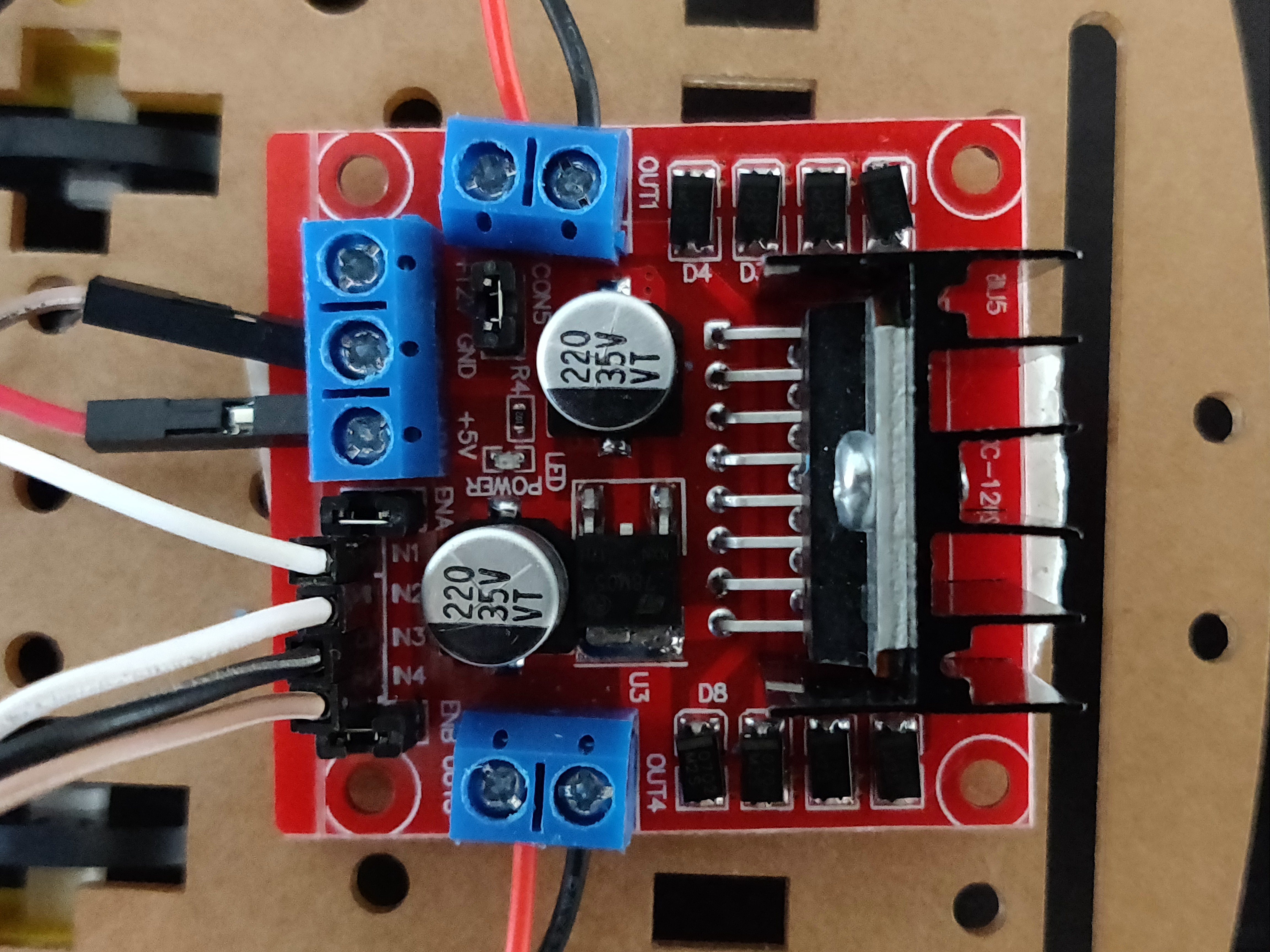
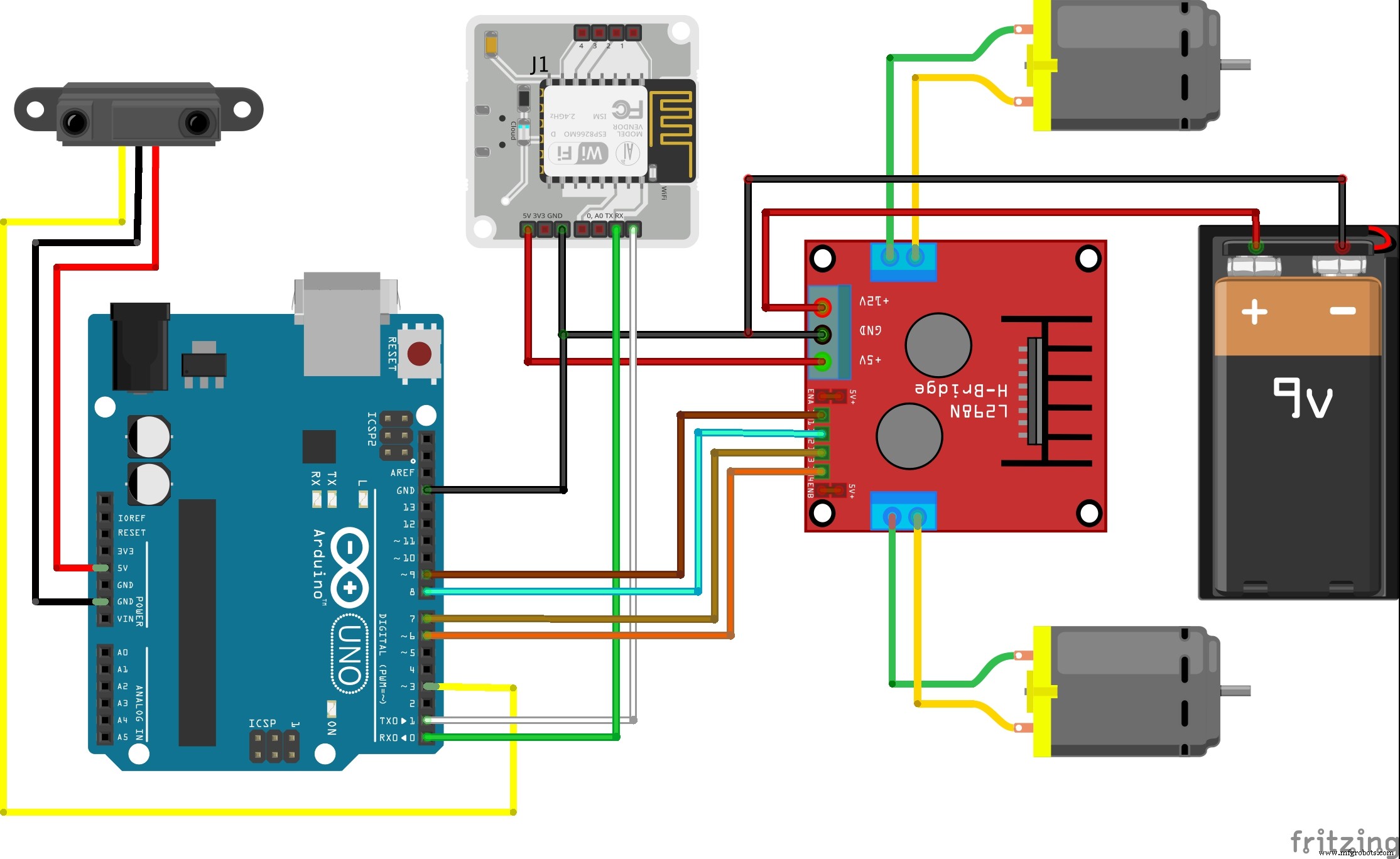
3. Теперь подключите клеммы двигателя к модулю драйвера двигателя L298N, как показано ниже.
ПРИМЕЧАНИЕ. Подключите оба вывода двигателя на одной стороне модуля драйвера.
4. Подключите контакты 5V и GND модуля драйвера к 5V и GND Arduino соответственно.
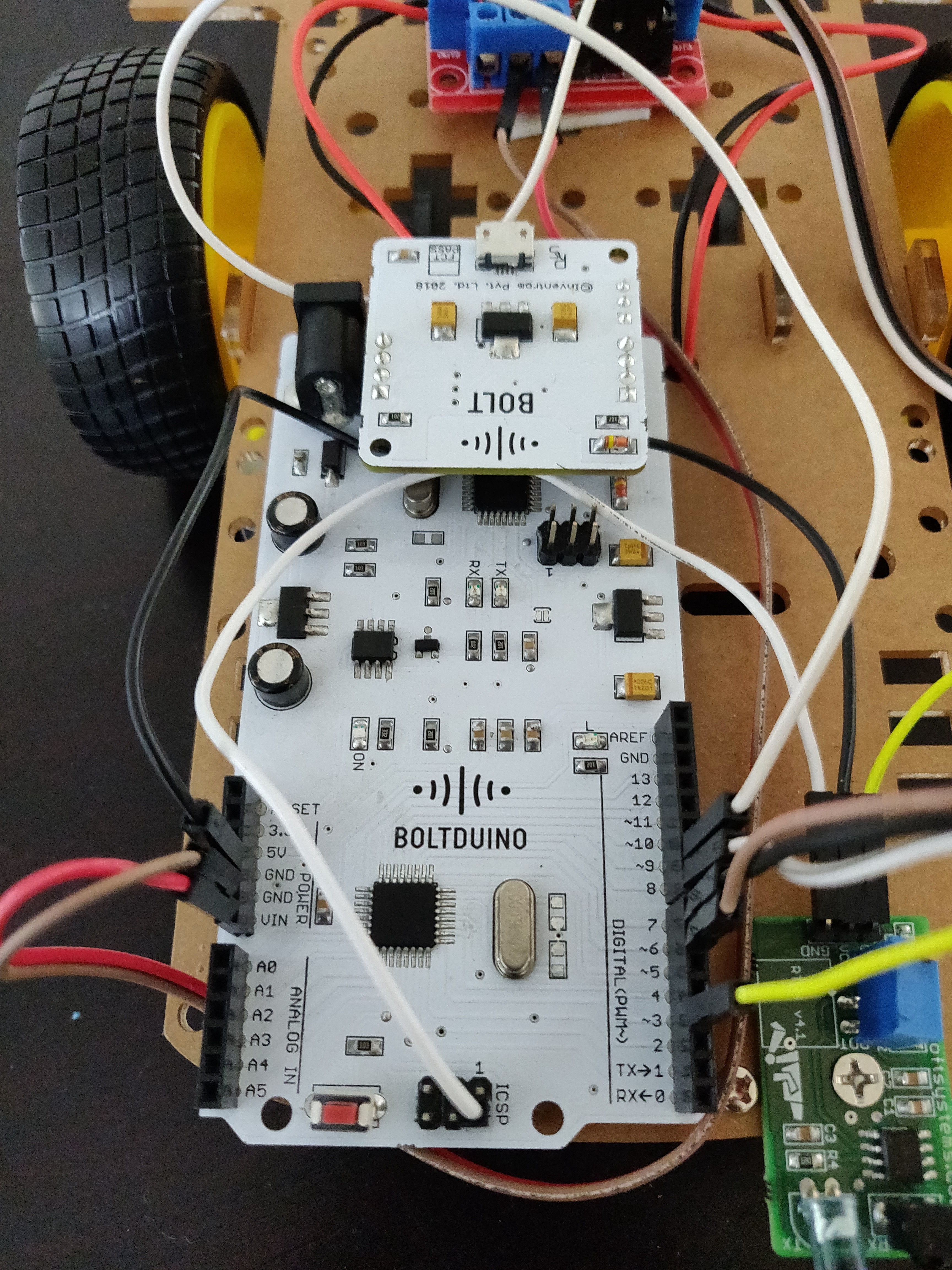
5. Подключите контакты 5V, GND, Tx и Rx Bolt к контактам 5V, GND, Rx и Tx Arduino соответственно. Для Boltduino:прикрепите блок болта к имеющемуся слоту.
6. Подключите четыре входных терминала (IN1, IN2, IN3, IN4) к контактам 6, 7, 8 и 9 соответственно.
7. Подключите контакты 5V, GND и OUT датчика приближения к контактам 5V, GND и 3 Arduino соответственно.


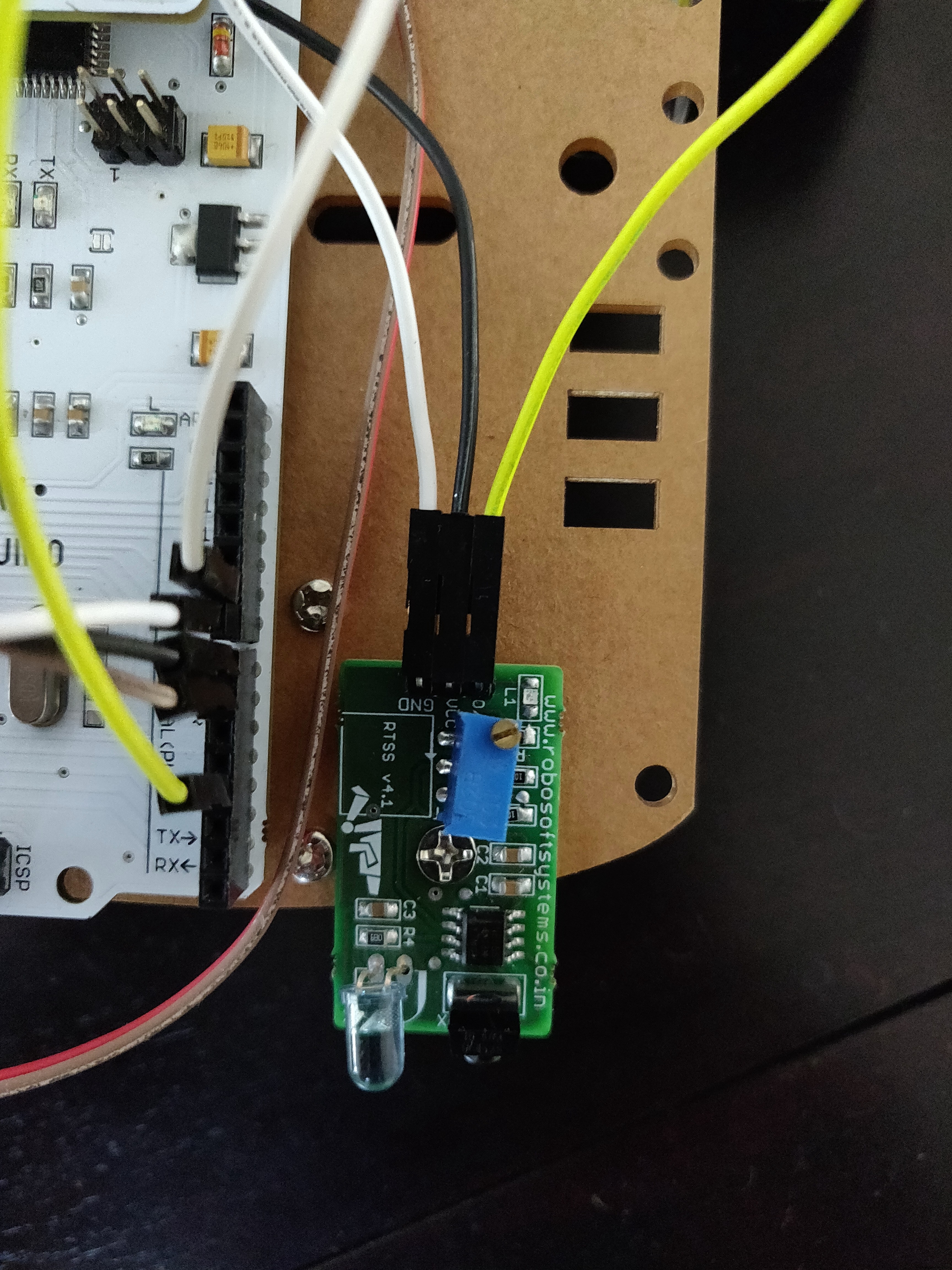
ПРИМЕЧАНИЕ. Для любого Дополнительная помощь приведена на схемах, приведенных ниже.
Подключение Bolt к облаку
После сборки оборудования зарегистрируйте и подключите модуль Bolt к Bolt Cloud. Узнайте больше о регистрации и подключении болта к облаку.
Акт четвертый:потом появилась возможность подключения
Теперь Верховный лорд Аппарата послал за Убийцей Печи Кода (то есть за мной).
Ему было поручено оживить этого робота с помощью своего кода и подключить его к Облаку. Следуйте по его стопам, и ваш робот тоже заработает.
Шаг 1: Получить the код .
Получите код из репозитория Github этого проекта. Загрузите файл .zip или клонируйте его в свою систему, как вам удобно.
Шаг 2: Работает с the код .
Код состоит из двух частей:
- Папка с названием app .
- Внутри этой папки находятся два файла i. controller.html II. controller.js. О них поговорим позже.
- Затем есть прошивка для вашего Arduino в файле с именем Bolt_Robot_Car.ino . Это будет прошито / загружено на ваш Arduino.
Шаг 3: Настройка вверх Arduino.
Когда вы закончите настройку оборудования и подключите болт к облаку, загрузите прошивку из файла Bolt_Robot_Car.ino к вашему Arduino. Чтобы узнать, как настроить Arduino IDE и загрузить код в Arduino, перейдите по этой ссылке.
Шаг 4: Контроллер Приложение
Дважды щелкните файл controller.html . файл, и вам должна быть представлена следующая веб-страница.
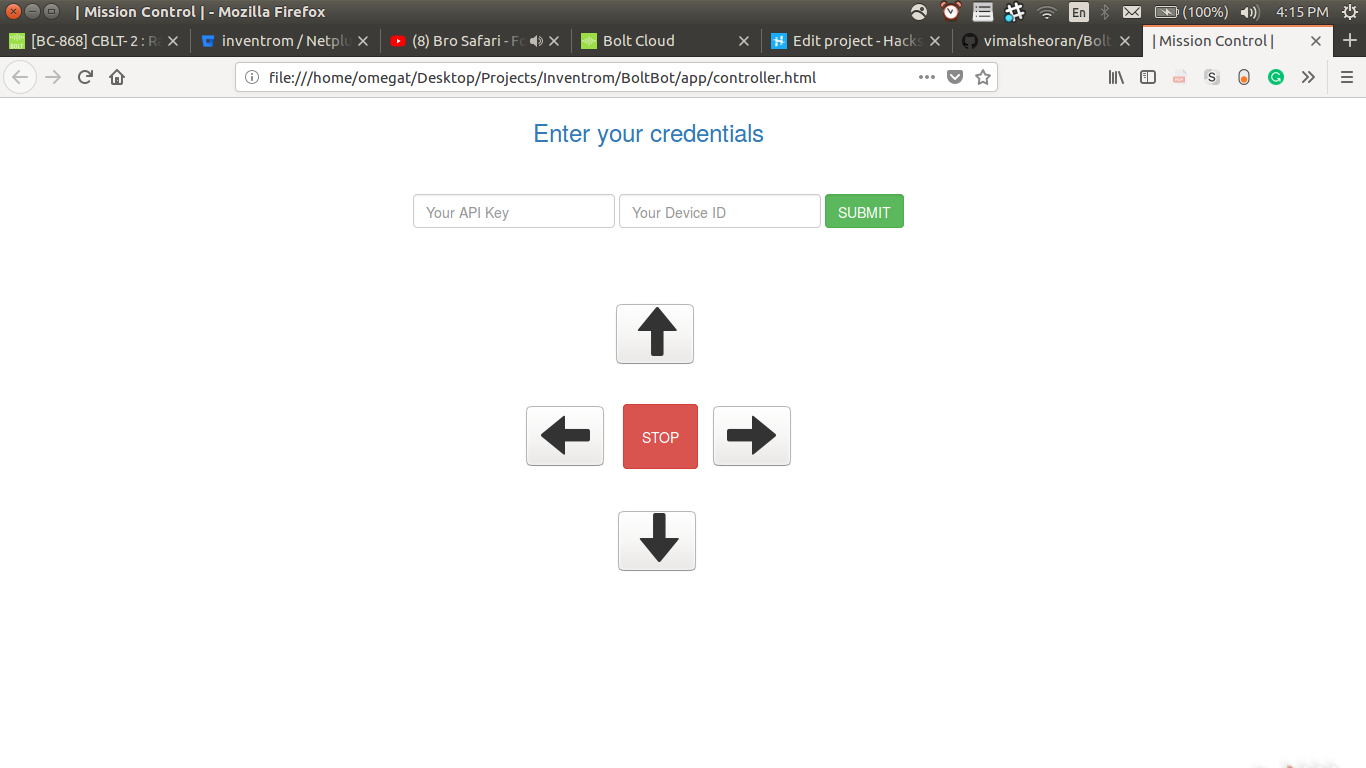
Теперь введите свой ключ API . и идентификатор устройства в соответствующие поля и нажмите ОТПРАВИТЬ . Вы можете получить свой ключ API и идентификатор устройства из панели управления Bolt Cloud.
После этого вы можете использовать кнопки управления для управления движением вашего робота. Нажатие кнопки запускает определенные функции JavaScript (проверьте файл controller.js ) для отправки команд в Bolt Cloud, а затем в ваш WiFi-модуль Bolt. Теперь у вас есть RC-бот, и вы можете с ним делать все, что захотите. С этим можно делать несколько вещей, вы можете прикрепить к нему несколько датчиков или сделать его автоматическим, или как хотите. А если вы ошиблись, не волнуйтесь, мы, уроженцы Земли Создателей, готовы помочь вам в любое время.
Акт пятый:пасхальные яйца
Я знаю, что некоторые из вас могут подумать:«Эй, вы сказали, что есть бонусная функция, где она?» Что ж, не волнуйтесь, мы не оставим вас в покое, но есть большая вероятность, что вы, возможно, уже заметили функцию в ActThree:Forging если нет, взгляните на это еще раз. Но у кого есть такое время, так что TL; DR ваш робот автоматически остановится, если он встретит препятствие или блокировку на своем пути, чтобы вы не разбили его об стену. Хорошо, это конец этой истории, посмотрите это видео, чтобы ознакомиться с видеоуроком для этого проекта.
Демо:
Код
BoltBot
https://github.com/vimalsheoran/BoltBotСхема
Производственный процесс
- Основные компоненты автомобиля и их функции
- Робот Raspberry Pi, управляемый через Bluetooth
- Робот, управляемый жестами, использующий Raspberry Pi
- РОБОТ МАЛИНЫ PI WIFI, УПРАВЛЯЕМЫЙ С СМАРТ-ТЕЛЕФОНА ANDROID
- Windows 10 IoT Core:робот, управляемый речью
- Робот, управляемый Wi-Fi и использующий Raspberry Pi
- ROObockey:робот для уличного хоккея с дистанционным управлением и прицеливанием
- Радиоуправляемая машина с джойстиком
- Робот, управляемый речью
- Рука робота, управляемая через Ethernet