


Tito - 3D-печатный робот Arduino UNO
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 20 | |||
 |
| × | 1 | |||
 |
| × | 16 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 6 |
Необходимые инструменты и машины
 |
| |||
 |
| |||
 |
|
Приложения и онлайн-сервисы
 |
| |||
 |
| |||
 |
|
Об этом проекте
Если у вас нет детали или ее сложно получить, вы можете просто купить наши полные комплекты!
Посетить www.ottodiy.com
Tito - это танцевальный би-пед робот DIY, производный от Zowi и Bob. В основном адаптирован к стандартной плате Arduino UNO с более простыми подключениями и поддержкой. Это была первая итерация Otto DIY

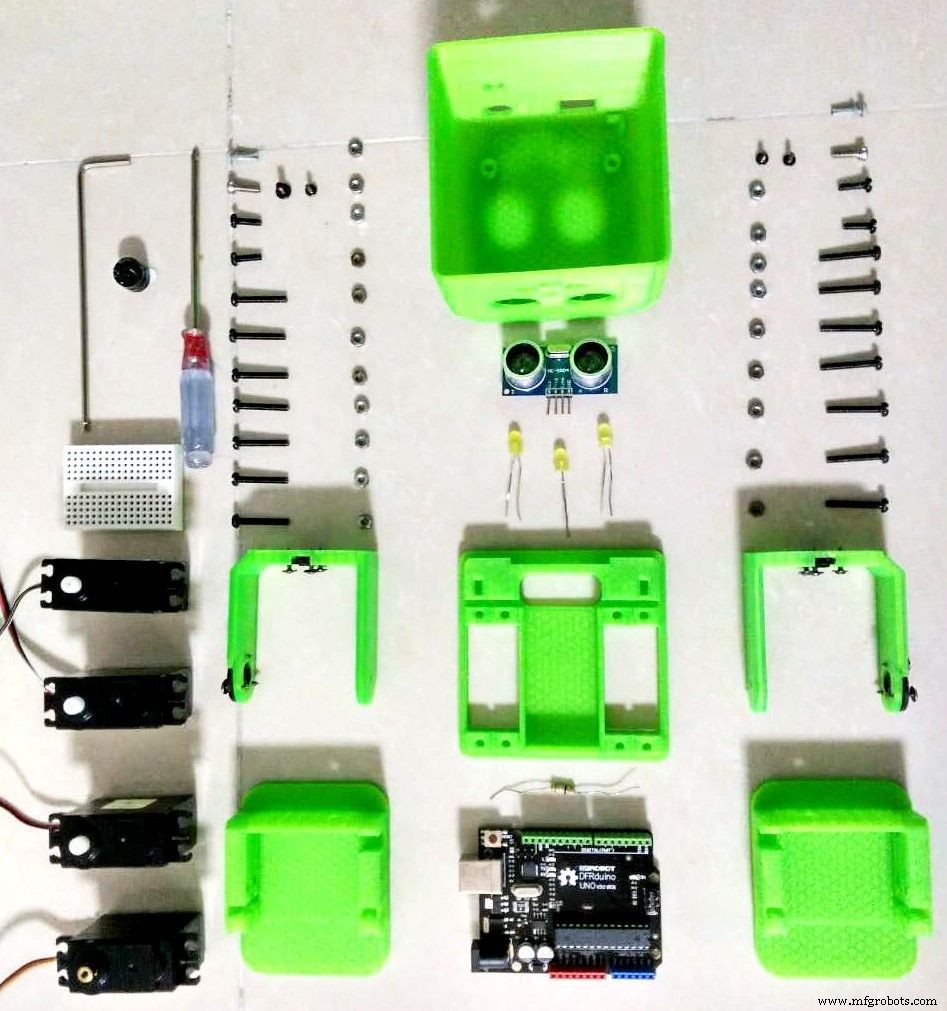
Инструменты и материалы
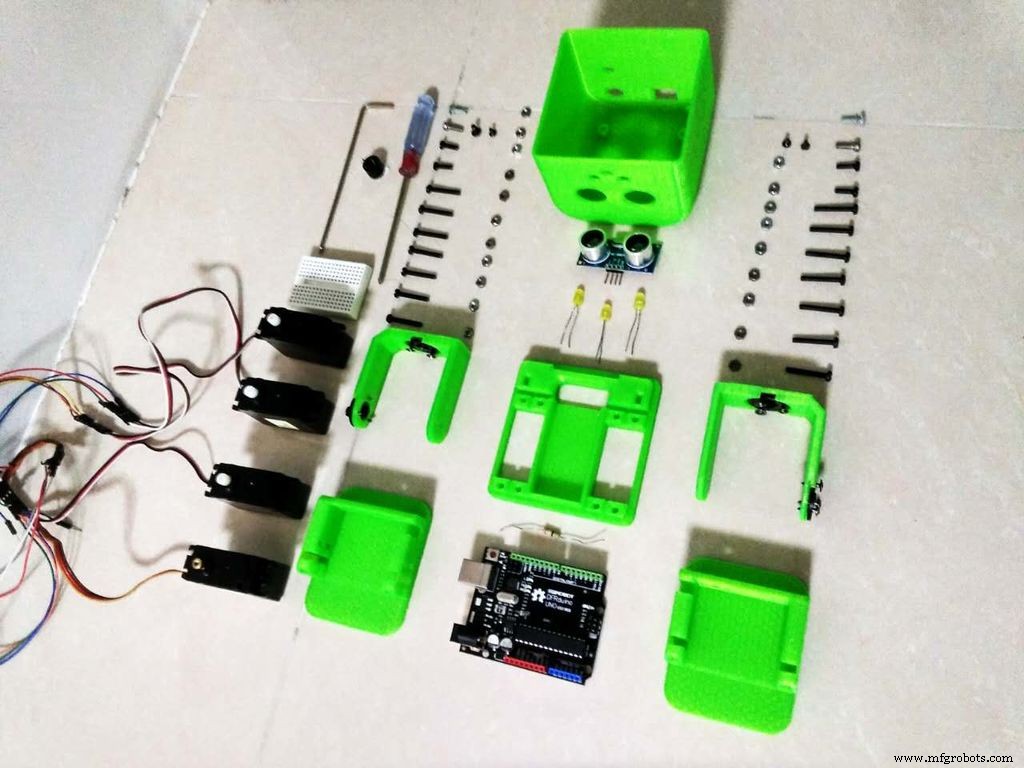
- Плата Arduino UNO или совместимая (в моем случае DFRduino UNO)
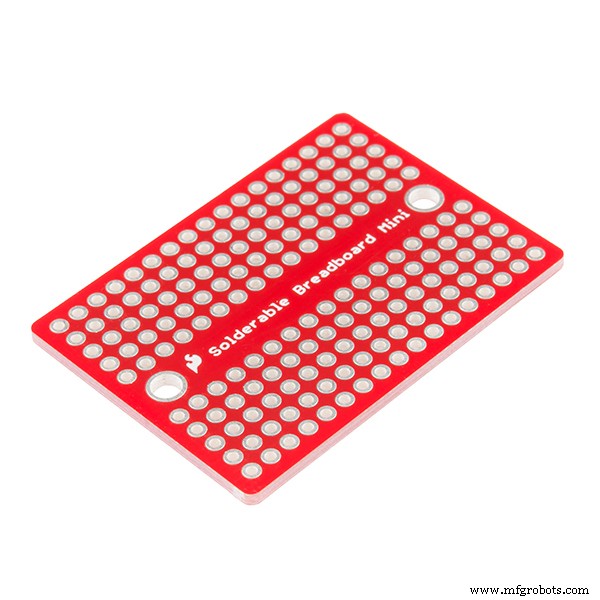
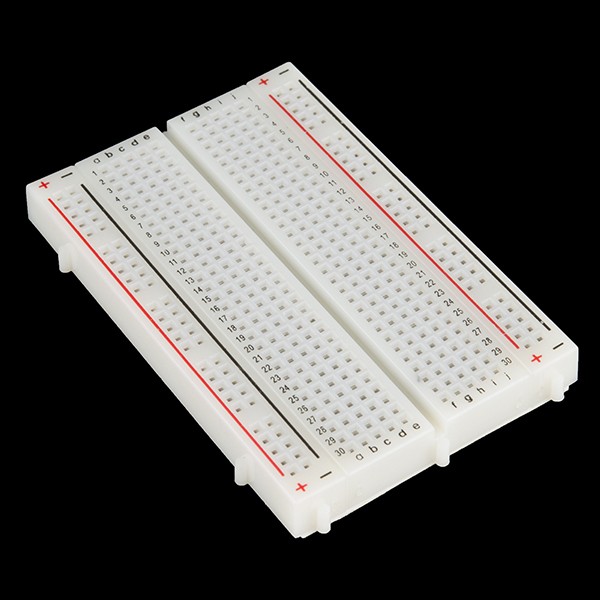
- Нано-макет
- Зуммер
- Сервопривод Futaba S3003 x4
- Ультразвуковой датчик HC-SR04
- Powerbank (необязательно)
- Гайка M3 x20
- Винт M3 x20
- Голова, напечатанная на 3D-принтере
- База, напечатанная на 3D-принтере
- 3D-печать Leg x2
- 3D-печать Foot R
- 3D-печать Foot L
Инструменты:
- 3D-принтер
- Шестигранный ключ
- Отвертка
Детали для 3D-печати

Файлы 3D.stl здесь. Найдите способ 3D-печати деталей, они не имеют опор, поэтому их очень легко печатать с заполнением 20% и разрешением 0,2 мм. Поскольку Tito является полностью открытым исходным кодом, вы можете найти дизайн файлов 3D-моделей, созданных в Autodesk 123D Design, здесь:
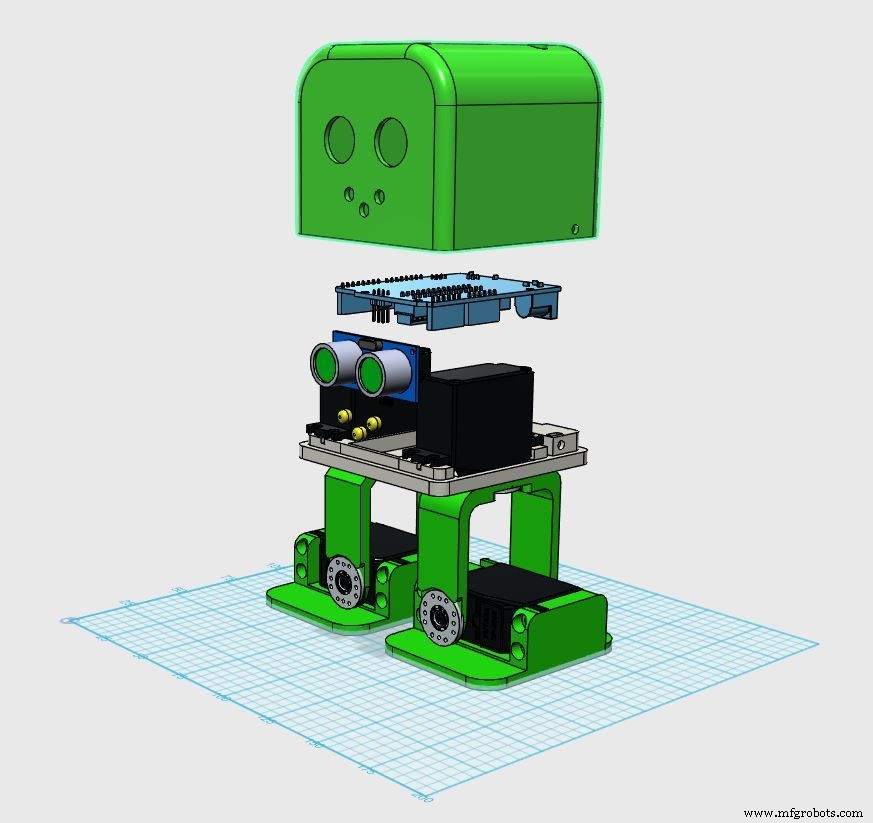
Предварительная сборка
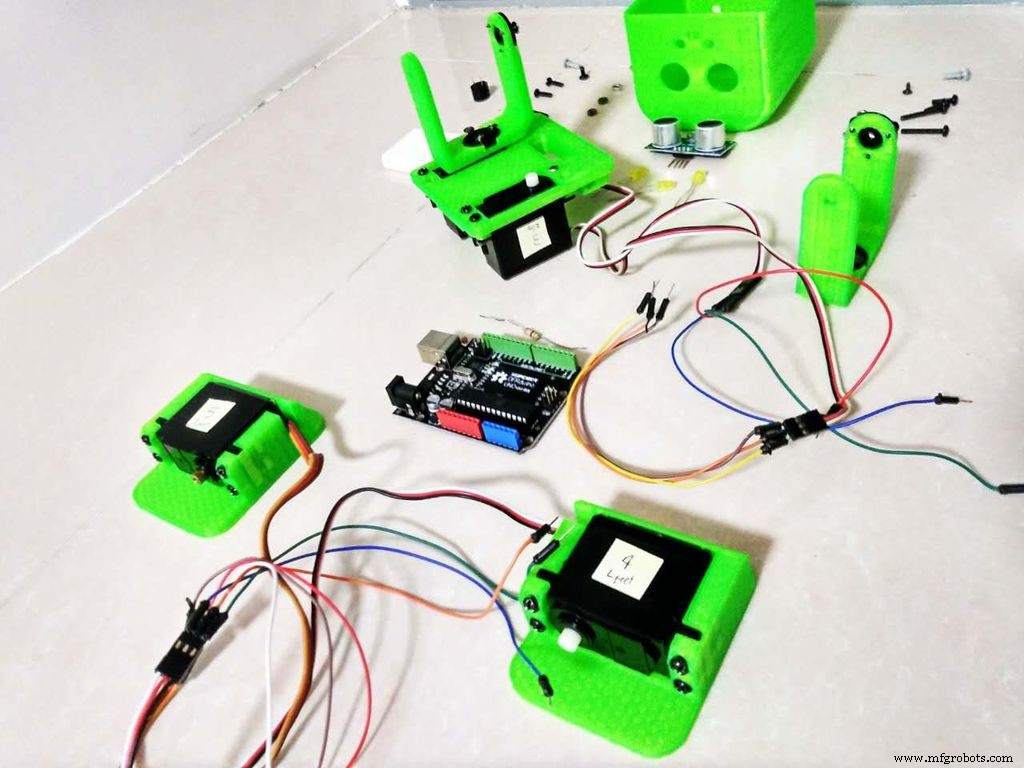
Есть много способов собрать Тито, но одна рекомендация такова:перед подключением сервоприводов соберите части серводисков на ножки, а затем вставьте сервоприводы в корпус и ножки.
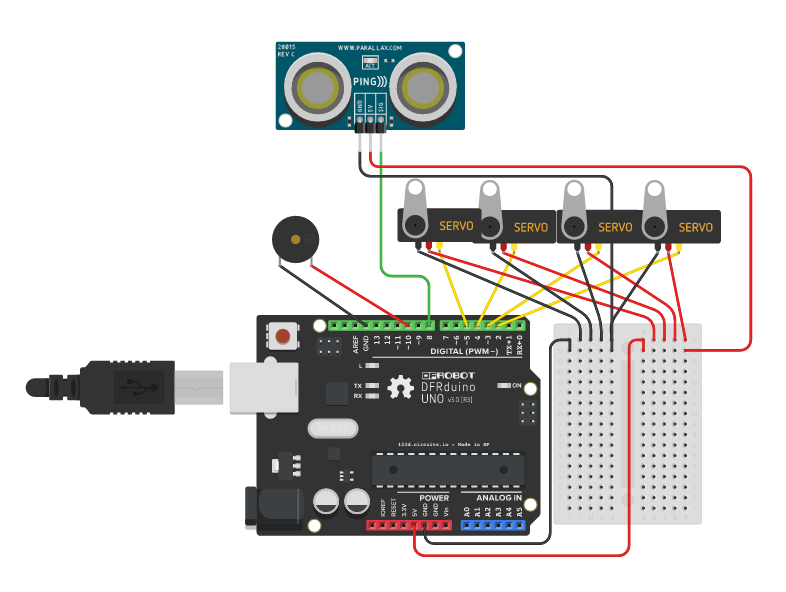
Схема
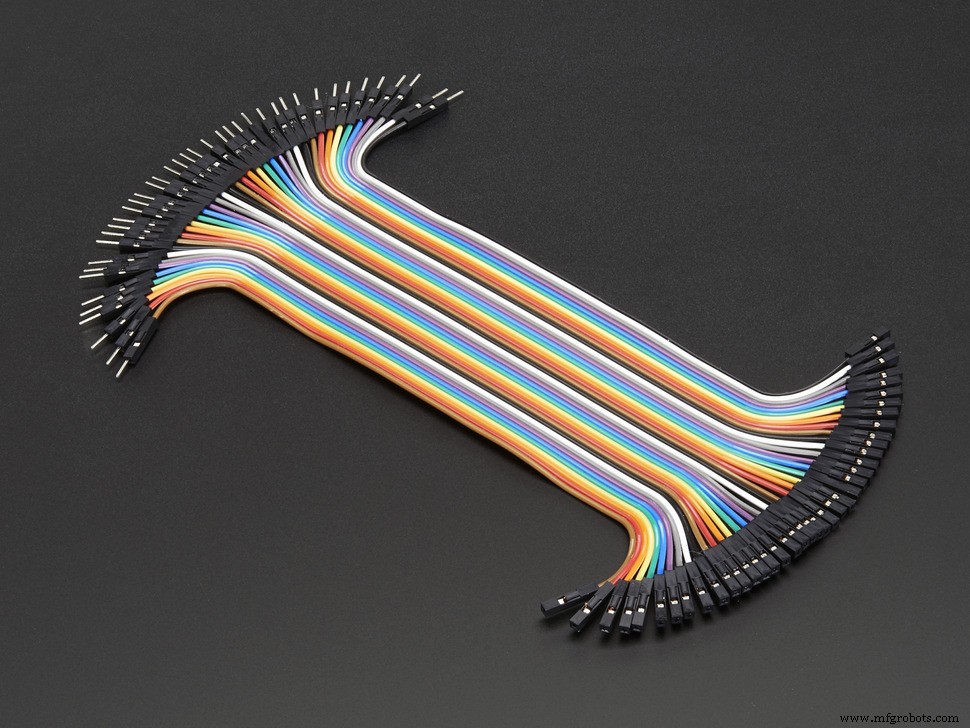
Следуйте рисунку для соединений. Ультразвуковой датчик HC-SR04 (триггер для контакта 8 и эхо для контакта 9). В процессе создания вам может потребоваться постоянное отключение и подключение, поэтому просто сохраните эту схему для дальнейших исправлений.
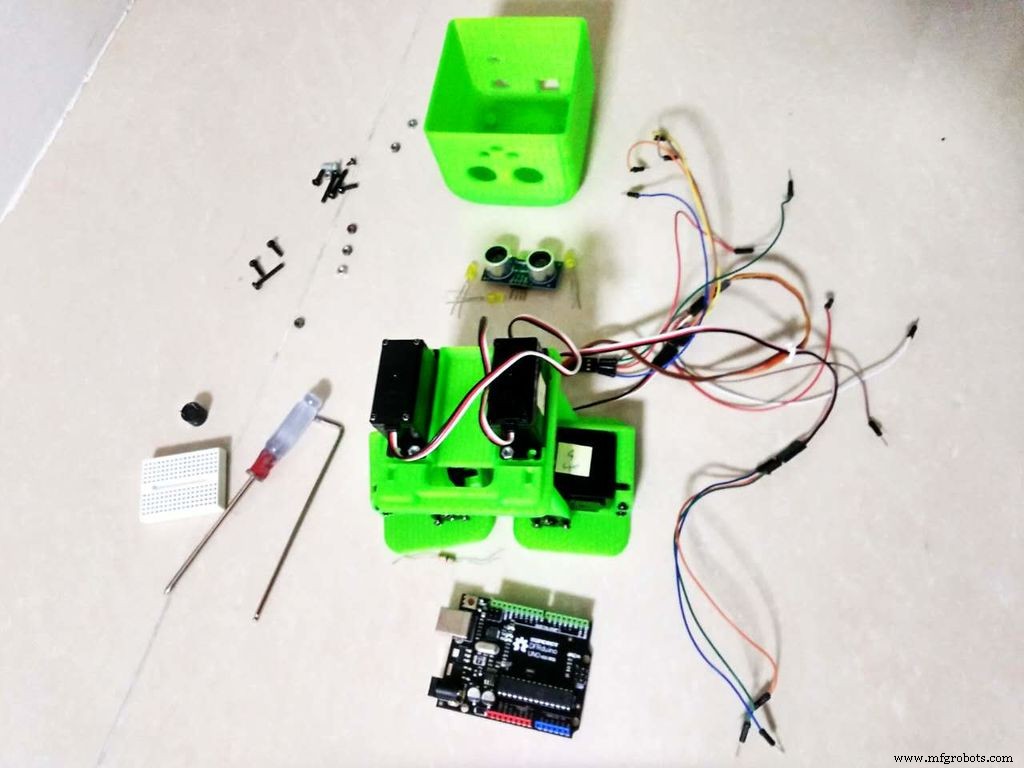
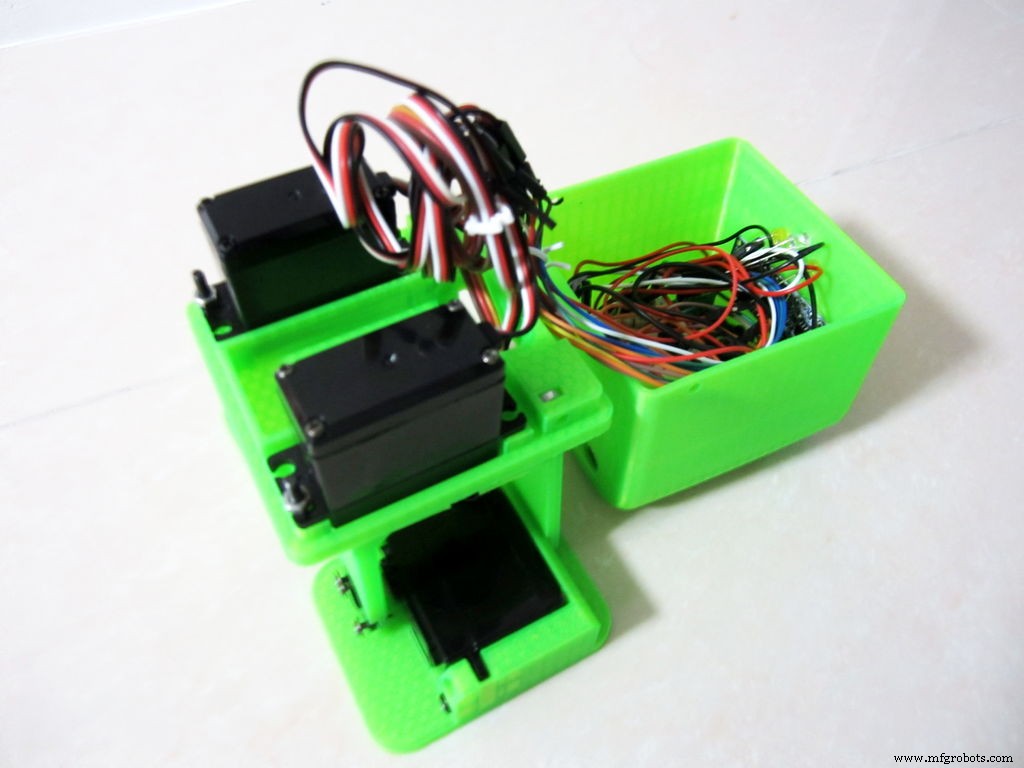
Проверьте положение сервоприводов

На картинке кабели отключены, но идея здесь состоит в том, чтобы загрузить код на плату Arduino UNO, который установит все сервоприводы под углом 90 градусов. Затем совместите правильный угол кривошипных дисков в корпусе и ступнях. Тито должен быть в таком положении, как на фото. Затем вы можете закрепить все сервоприводы с помощью винтовой оси.
Соберите плату Arduino UNO
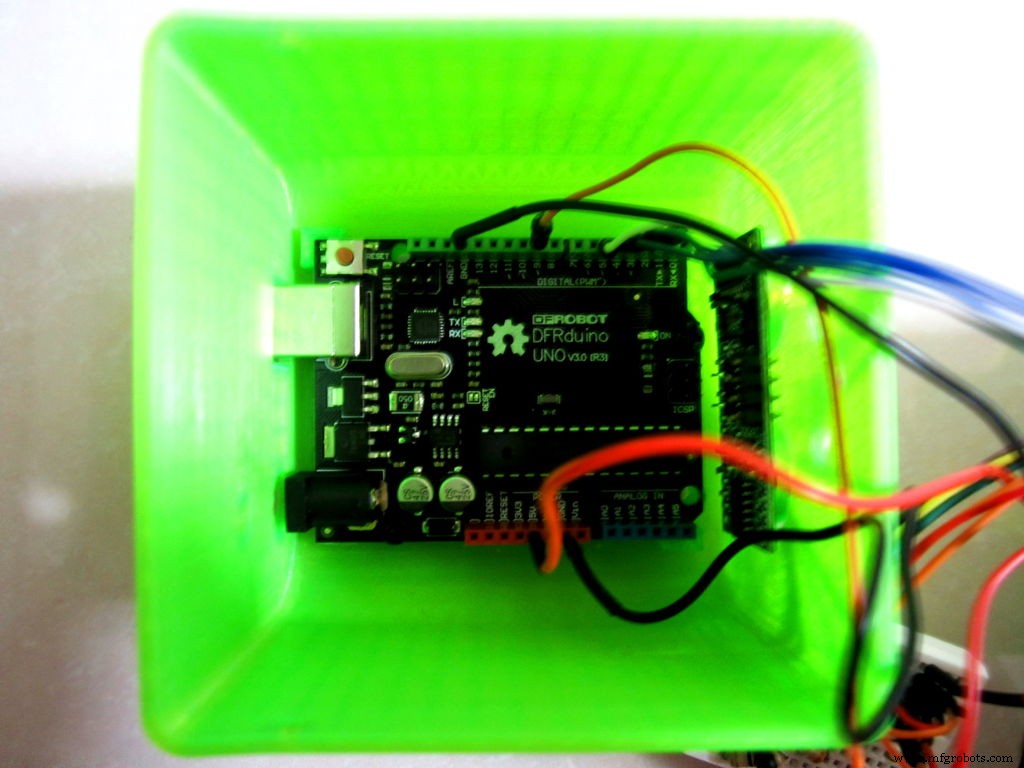
Такая конструкция позволяет легко закрепить любую совместимую с Arduino Uno плату (в моем случае DFRduino UNO) в головной части, вы можете использовать до 4 винтов.
Окончательная сборка
Если все соединения надежно закреплены, вы можете закрыть головную часть и прикрепить ее к корпусу боковыми винтами.
Программирование Arduino IDE


Все библиотеки и коды скетчей находятся в этом репозитории Github. Просто подключите USB-кабель к Arduino UNO и загрузите коды. Робот имеет множество запрограммированных движений, таких как ходьба в разных направлениях, ультразвуковое исследование, подъем, наклон и танец.
опубликуйте свой ремикс и модификации в хакерском сообществе или на Thingiverse
ottodiy.com
Код
Github
https://github.com/OttoDIY/OttoDIYИзготовленные на заказ детали и корпуса
Thingiverse
Файл САПР на сайте thingiverse.comСхема
Производственный процесс
- Цифровые игральные кости Arduino
- Игровой контроллер Arduino
- Робот-последователь линии
- Роботизированная рука, напечатанная на 3D-принтере Arduino
- Простой калькулятор UNO
- Робот, управляемый речью
- MobBob:самостоятельный робот Arduino, управляемый смартфоном Android
- Игра Pixel Chaser
- Постоянство видения
- NeoMatrix Arduino Pong