


Автомобиль с управлением по Bluetooth
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Привет!
Все, что можно контролировать, прекрасно. Не так ли? Мы, люди, любим контролировать вещи, и поэтому автоматизация и робототехника так увлекательны.
Из этого туториала Вы узнаете, как создать свой собственный автомобиль, управляемый через Bluetooth. Итак, приступим.
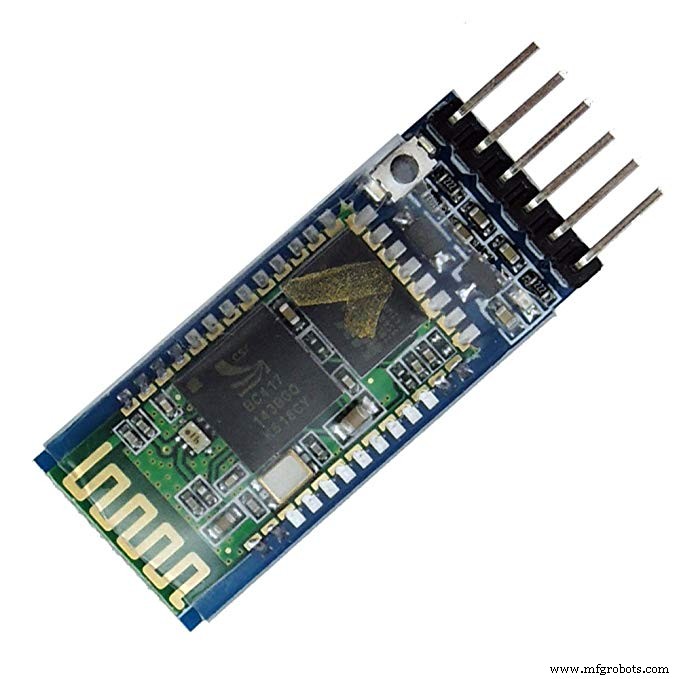
Это будет автомобиль с управлением через Bluetooth, поэтому в этом проекте мы будем использовать модуль Bluetooth HC-05 для приема управляющих пакетов данных.
Нам также понадобится приложение для Android, которое будет отправлять пакеты управляющих данных в модуль Bluetooth. Для этой цели мы будем использовать стороннее приложение (нажмите здесь, чтобы загрузить).
- -> Хорошо, ребята! Давайте построим оборудование.
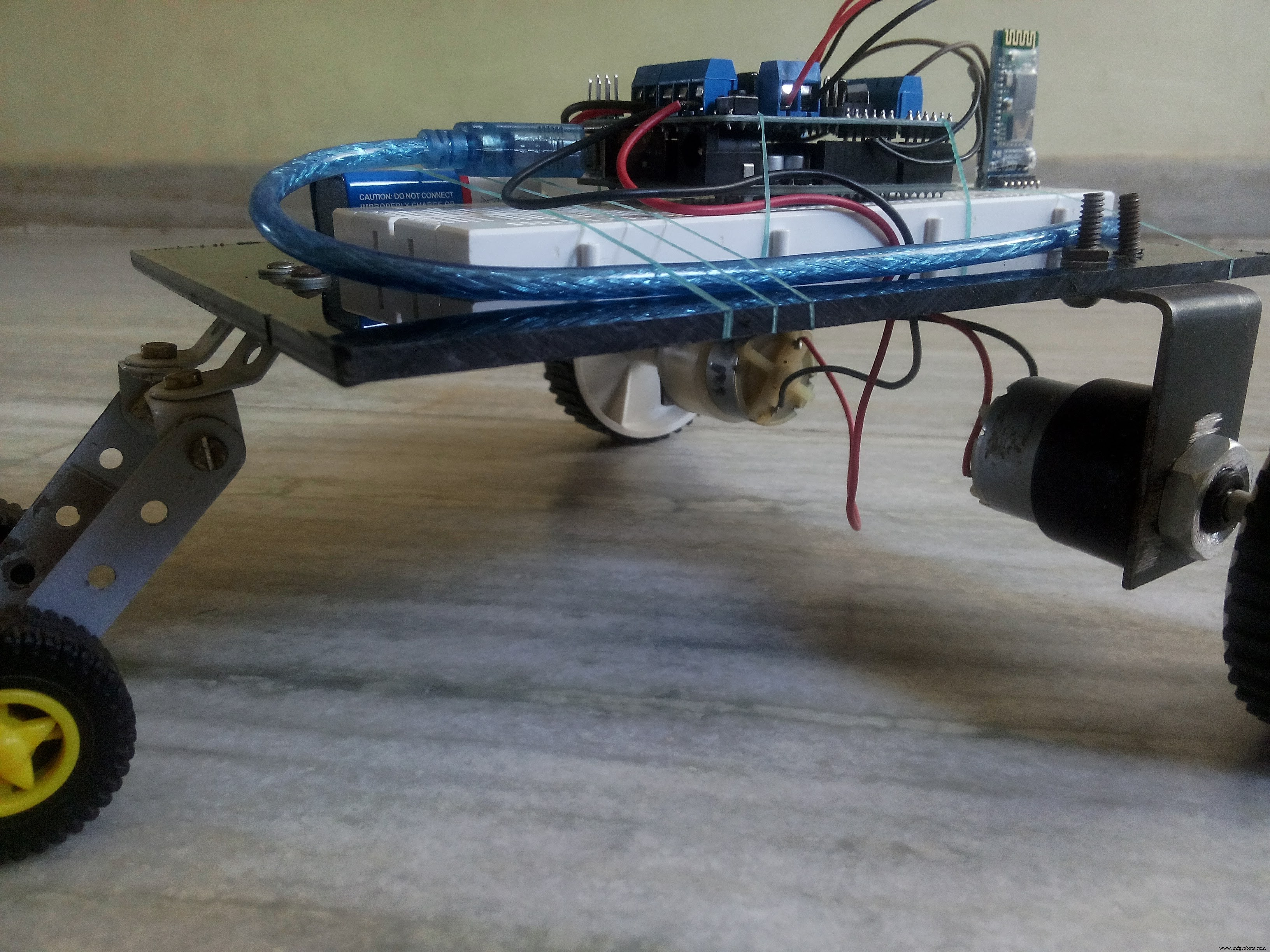
- -> Кузов автомобиля.
Автомобиль, который мы строим для этого проекта, будет двухмоторным. Я использовал два двигателя постоянного тока 12 В, 200 об / мин. Можно использовать уже готовое шасси. Я использовал лист ПВХ в качестве шасси.
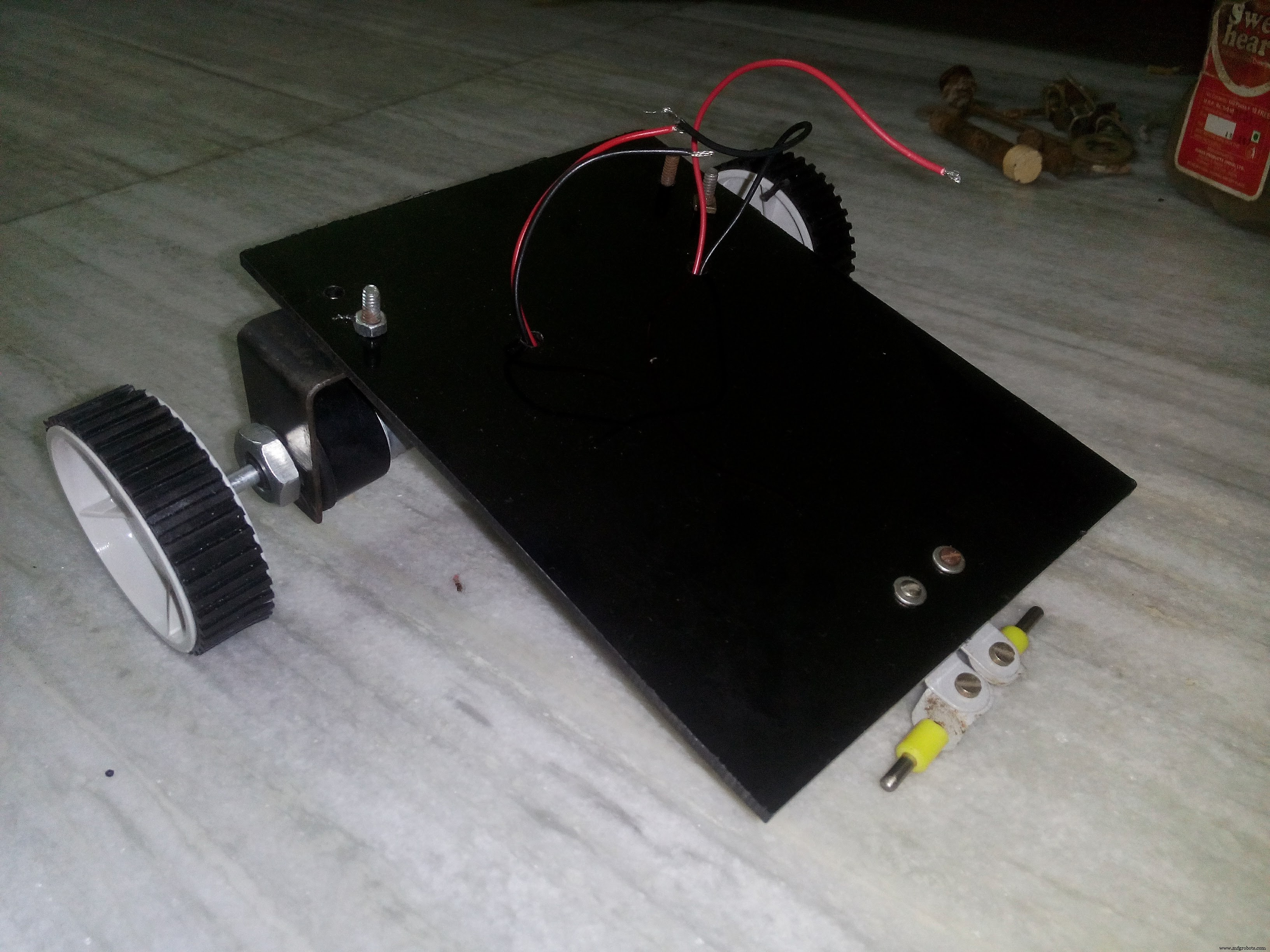
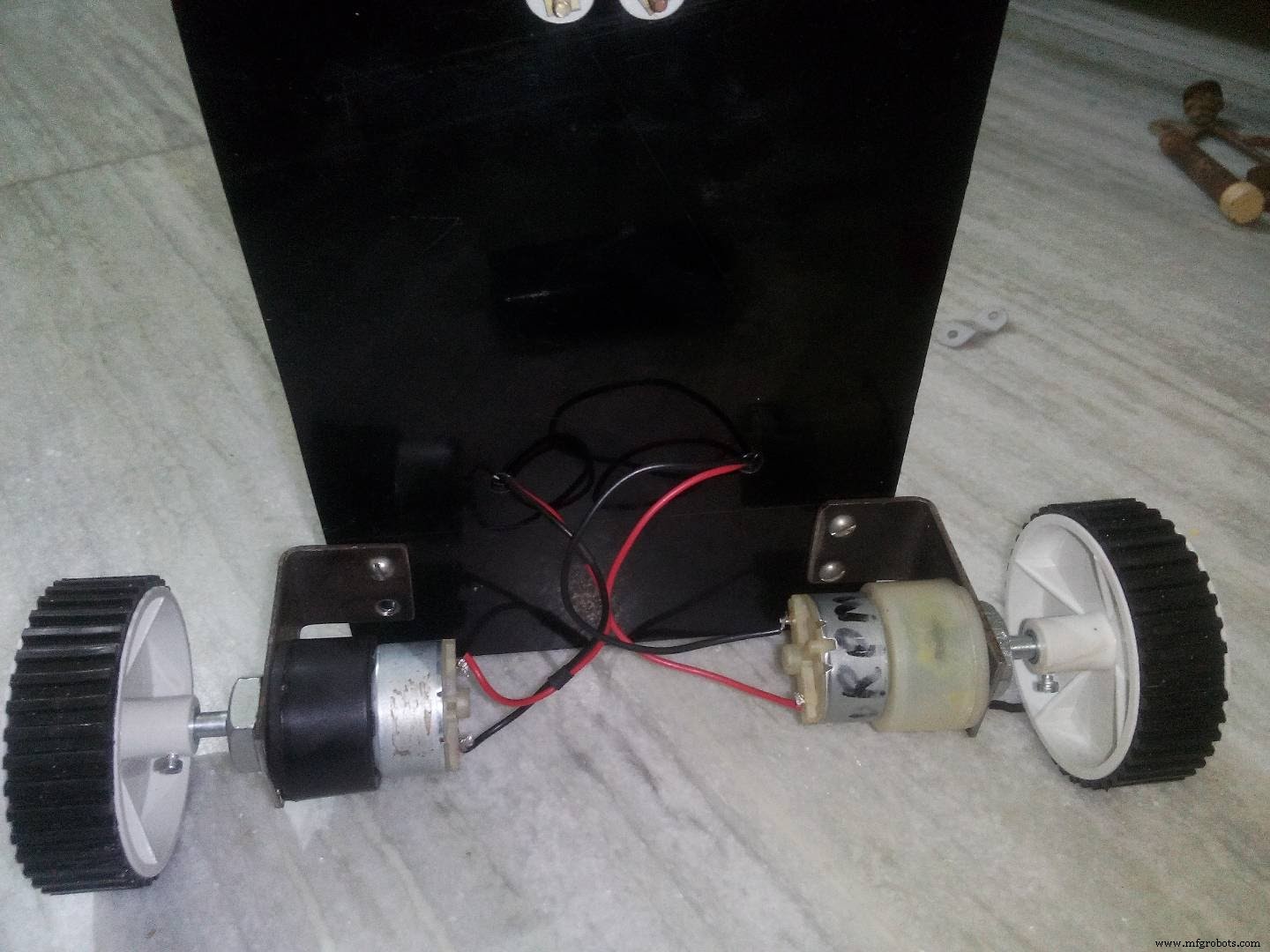
Итак, основная конструкция нашей машины готова. Вы можете использовать эту конструкцию или разработать свою собственную, но помните, что вес должен быть как можно меньше, поскольку это конструкция с двумя двигателями.
-> Схема
Теперь давайте построим схему
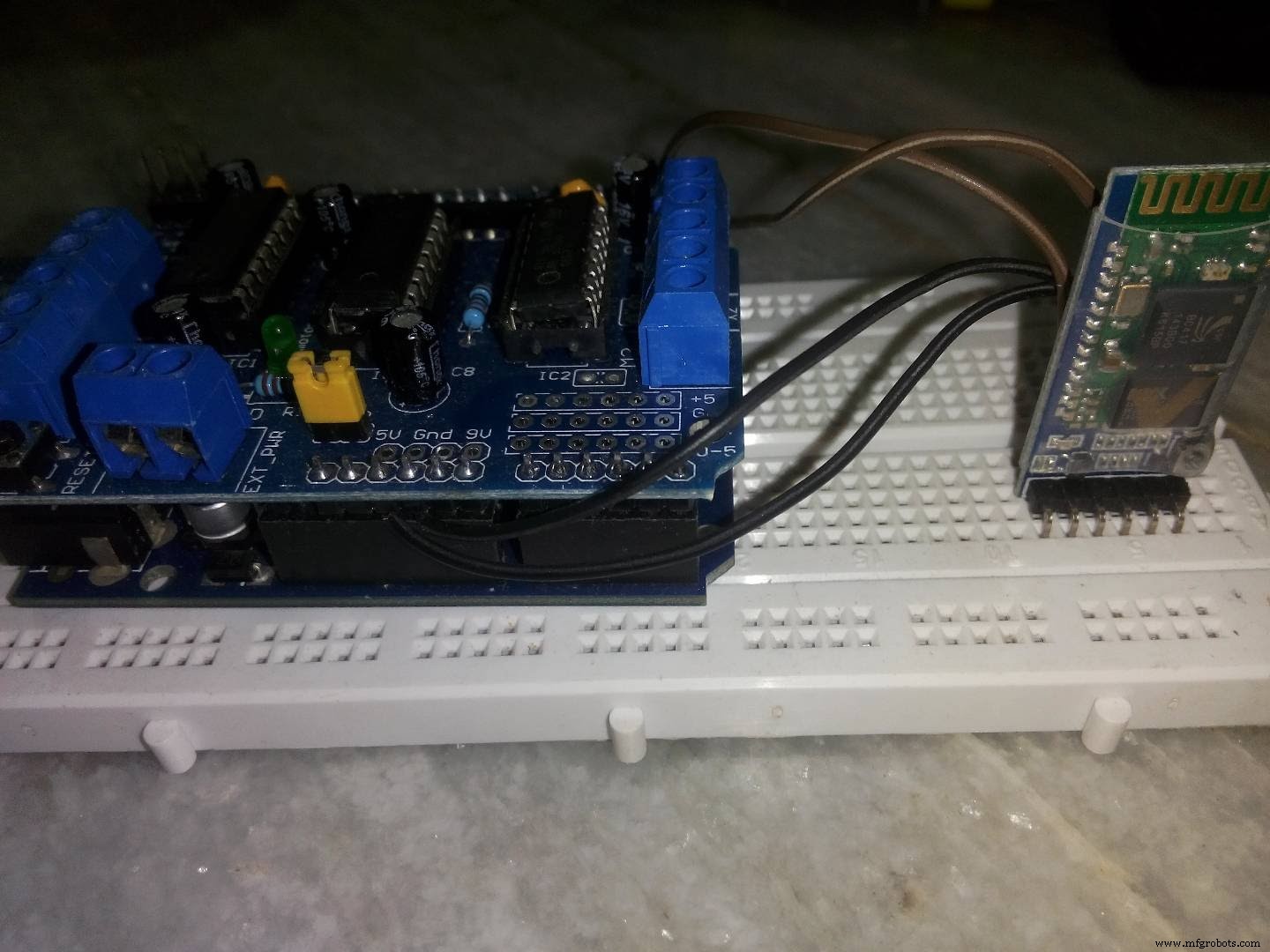
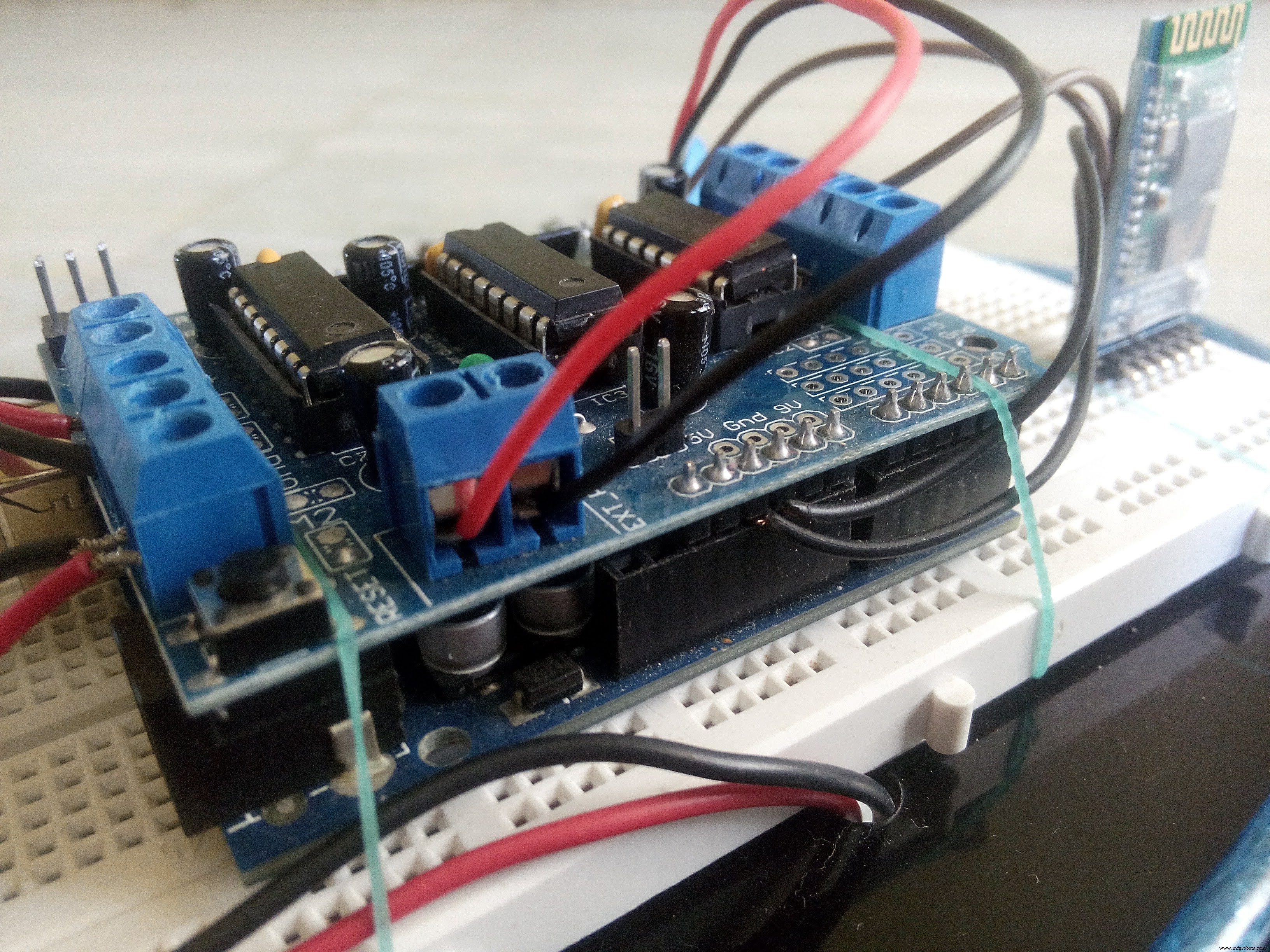
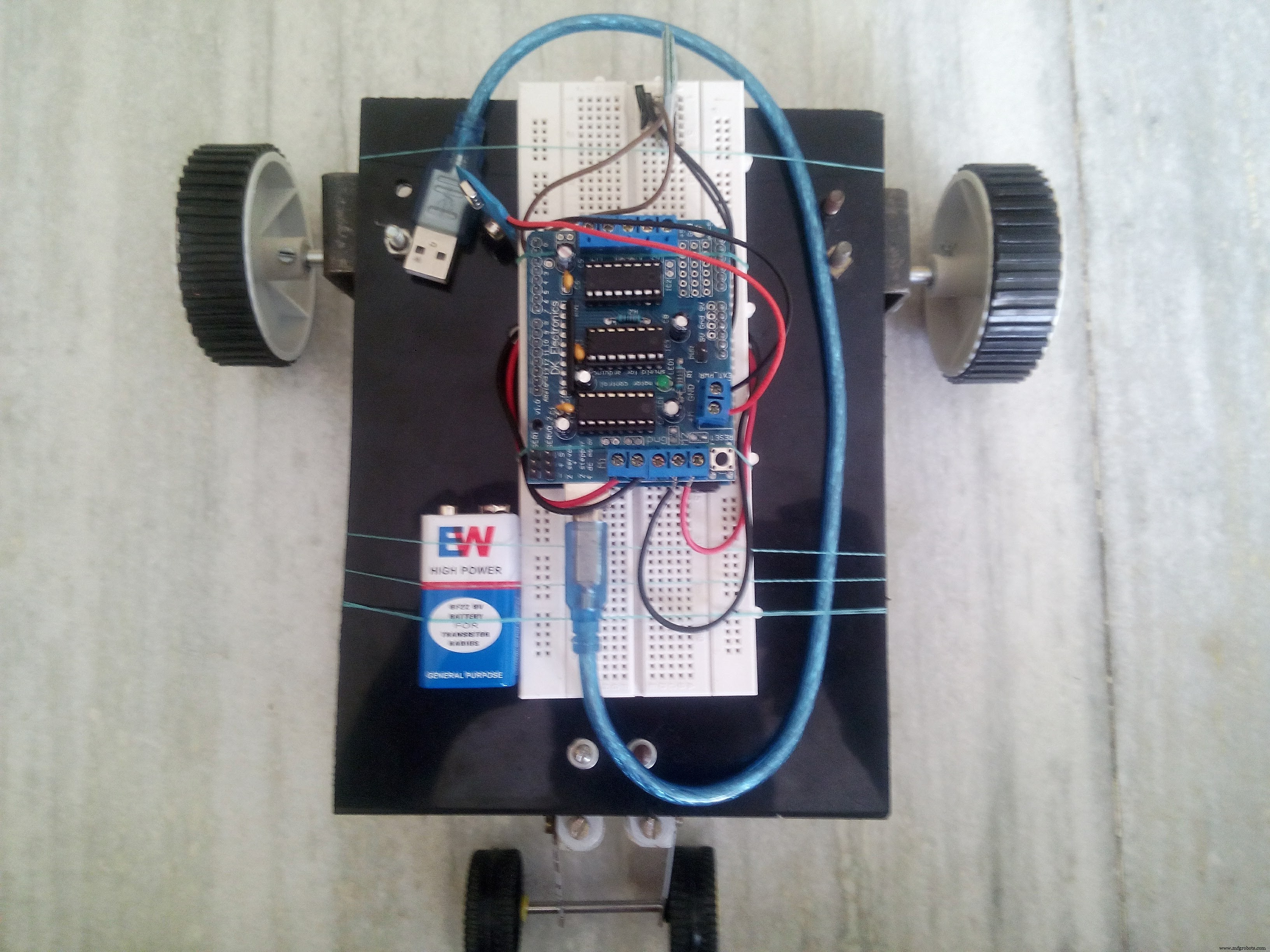
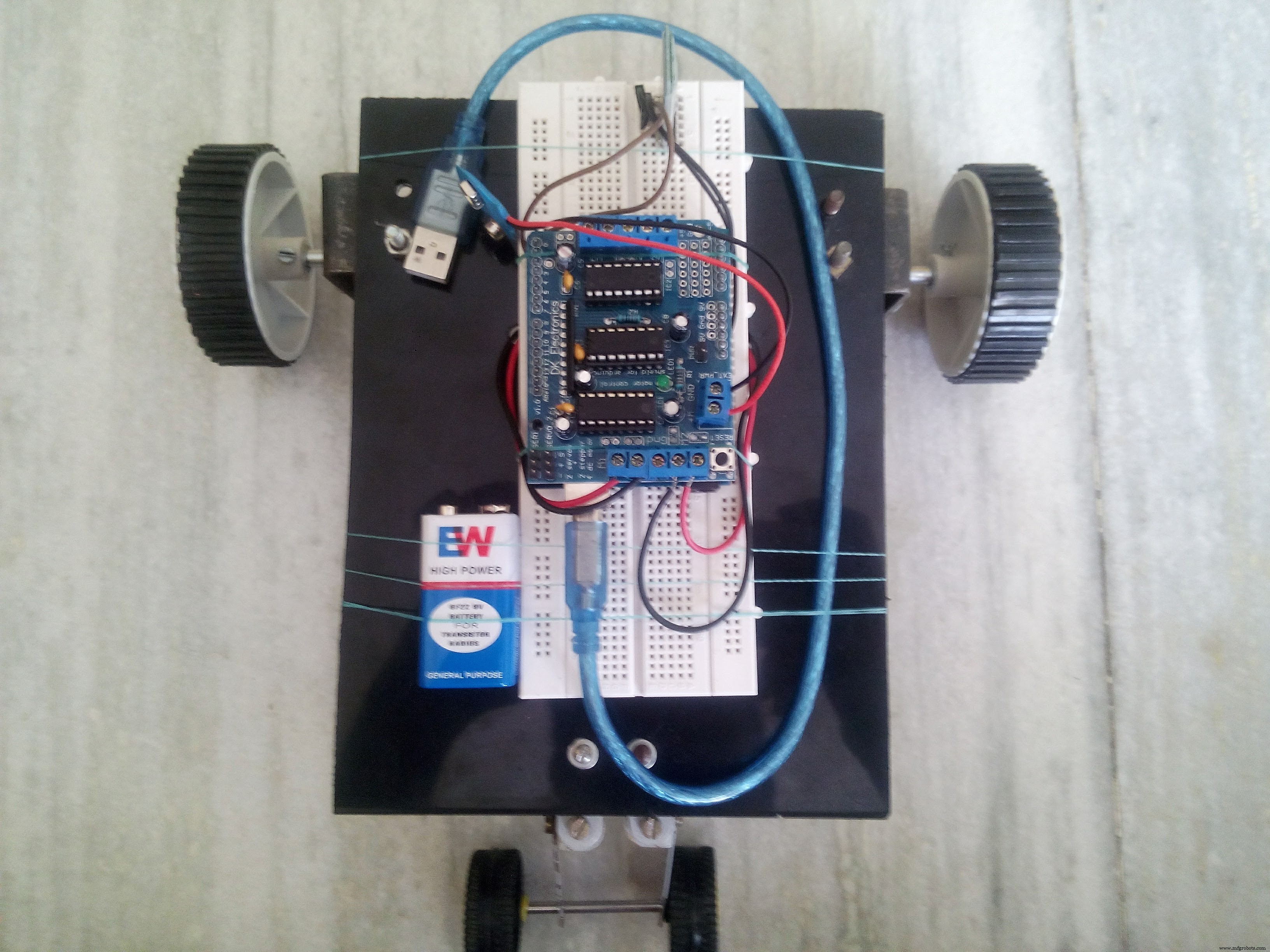
Следуйте схеме, чтобы сделать соединения. Вот как это будет выглядеть после того, как будут выполнены все подключения.
-> Источник питания
Теперь это немного критично.
Для питания Arduino Uno используется внешний аккумулятор с выходным напряжением 5 В. Этого недостаточно, чтобы управлять этими 12-вольтовыми двигателями постоянного тока. Итак, нам нужен дополнительный источник питания.
Я подключил две батареи по 9 В, чтобы получить питание 18 В. Основная проблема заключалась в том, что здесь также требовалось большое количество тока.
Мои аккумуляторы не могли обеспечивать достаточный ток, поэтому производительность этого автомобиля не была на 100% удовлетворительной. Он работал, но двигатели работали на очень низкой скорости.
Поэтому я рекомендую использовать аккумулятор на 12 В, иначе вам придется пойти на компромисс со скоростью.
-> Код
Здесь мы будем использовать направление вращения двигателей для управления направлением автомобиля.
Вперед - оба двигателя движутся вперед
Назад - оба двигателя движутся в обратном направлении
Влево - левый мотор движется назад, а правый мотор движется вперед
Вправо - левый мотор движется вперед, а правый мотор движется назад
Стоп - оба двигателя останавливаются
void forward () {motor1.run (FORWARD); motor2.run (ВПЕРЕД);} назад назад () {motor1.run (НАЗАД); motor2.run (НАЗАД);} void left () {motor1.run (НАЗАД); motor2.run (ВПЕРЕД);} void right () {motor1.run (ВПЕРЕД); motor2.run (НАЗАД);} void Stop () {motor1.run (RELEASE); motor2.run (РЕЛИЗ);}
----------------------------------------------- ---------------------------------------
Вот и все!
1. Просто загрузите код в Arduino.
2. Установите связи.
3. Запустите приложение.
4. Подключите телефон к машине.
Вот наша готовая КРАСОТА!

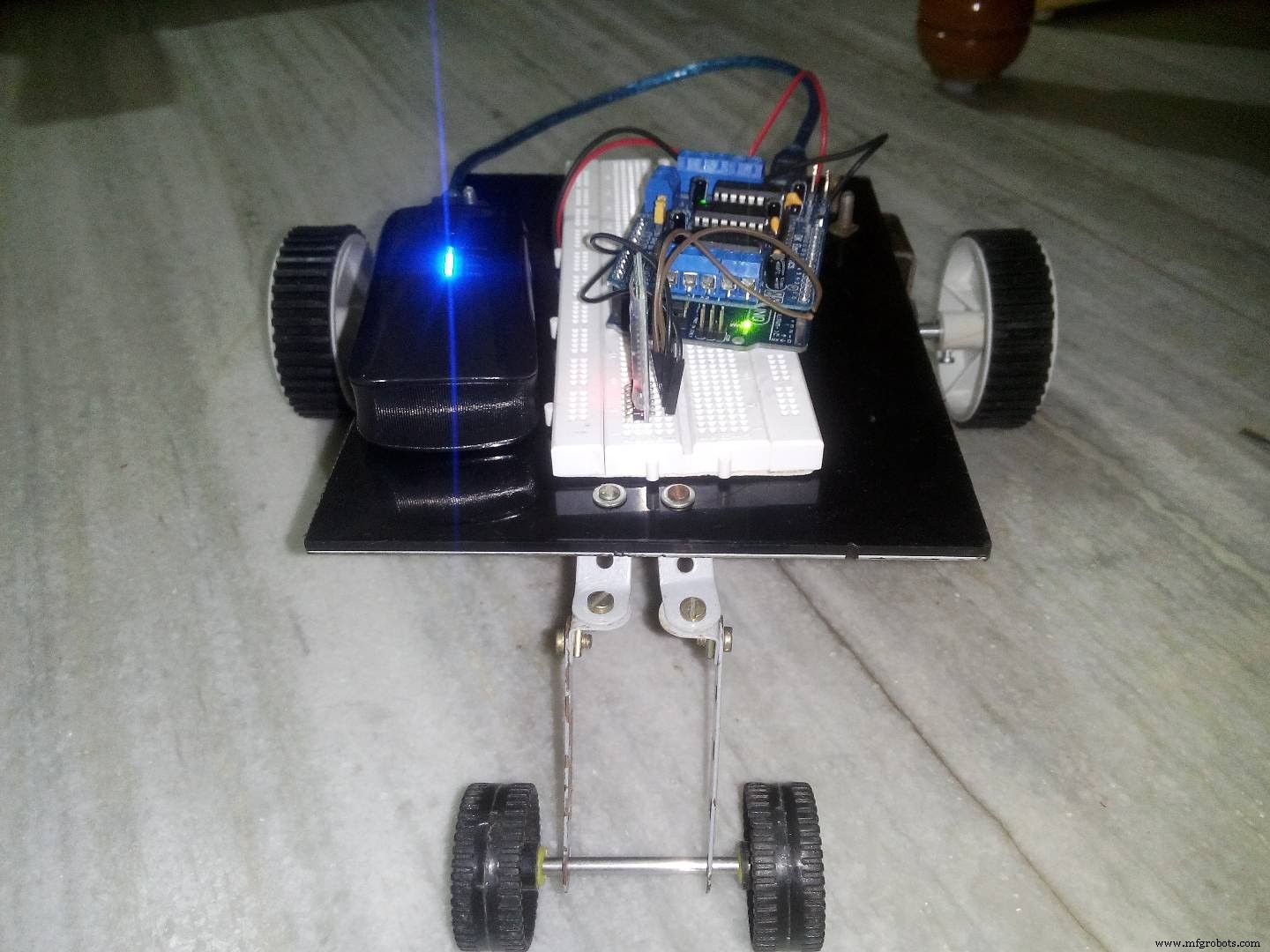
Я надеюсь, что этот урок был достаточно хорош, чтобы вы начали. Если у вас есть предложения по изменению или дальнейшему дополнению этого проекта, дайте мне знать в разделе комментариев.
Код
- Код
Код C / C ++
Этот код необходимо загрузить на Arduino Uno#includeAF_DCMotor motor1 (1); // motor1 - это левый мотор AF_DCMotor motor2 (2); // мотор2 - правильный мотор int val; void setup () {Serial.begin (9600); motor1.setSpeed (255); // установлена скорость двигателя motor2.setSpeed (255); Stop ();} void loop () {bt =Serial.read (); if (val =='1') // когда модуль bluetooth получает 1, машина движется вперед {forward (); } if (val =='2') // когда модуль bluetooth получает 2, машина движется назад {backward (); } if (val =='3') // когда модуль bluetooth получает 3, машина движется влево {left (); } if (val =='4') // когда модуль bluetooth получает 4, машина движется вправо {right (); } if (val =='5') // когда модуль bluetooth получает 5, машина останавливается {Stop (); }} void forward () {motor1.run (FORWARD); motor2.run (ВПЕРЕД);} назад назад () {motor1.run (НАЗАД); motor2.run (НАЗАД);} void left () {motor1.run (НАЗАД); motor2.run (ВПЕРЕД);} void right () {motor1.run (ВПЕРЕД); motor2.run (НАЗАД);} void Stop () {motor1.run (RELEASE); motor2.run (ВЫПУСК);}
Схема
Это связи. Подключите источник питания 12 В к экрану драйвера двигателя. Обратите внимание, что схема не включает внешний источник питания.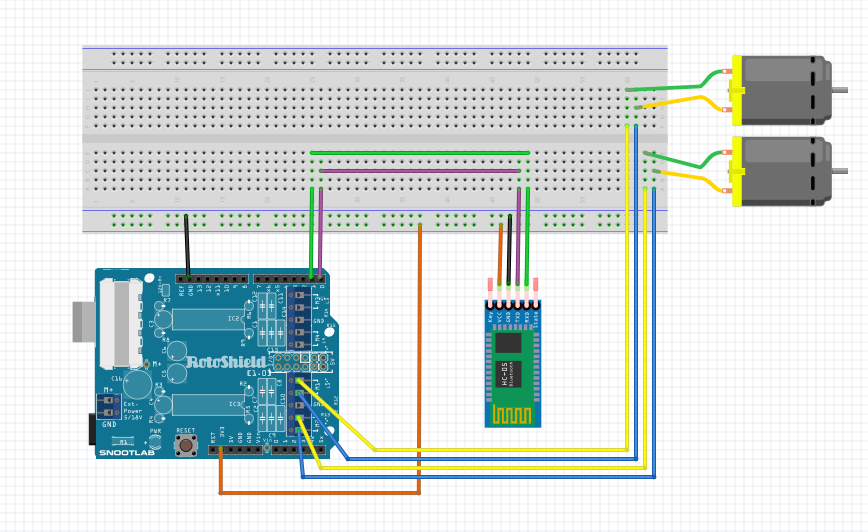
Производственный процесс
- Робот Raspberry Pi, управляемый через Bluetooth
- Превратите свой радиоуправляемый автомобиль в радиоуправляемый автомобиль с Bluetooth
- Радиоуправляемая машина с джойстиком
- Arduino с Bluetooth для управления светодиодом!
- Простой калькулятор UNO
- Робот, управляемый речью
- Постоянство видения
- Устройства с голосовым управлением Bluetooth с OK Google
- Wi-Servo:серводвигатели, управляемые через браузер Wi-Fi
- Радиоуправляемый автомобиль Porsche (проект Arduino)