


ПИД-управление захватом робота в Matlab / Simulink
<основной класс="главный сайт" id="главный">
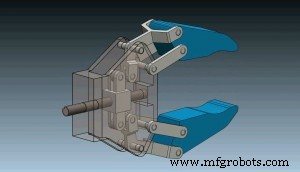
В этом уроке мы увидим, как сделать ПИД-управление 3D-моделью механизма захвата робота. Модель Simulink состоит из двух подсистем. Подсистема двигателя постоянного тока, которая представляет собой модель с использованием блоков Simulink и 3D-модель, которая импортируется из Solidworks с использованием SimMechanics Link. Мы используем пошаговую функцию, чтобы активировать двигатель постоянного тока для управления роботом-захватом, и мы используем блок ПИД-регулятора Simulink для автоматической настройки параметров ПИД-регулятора.
Вы можете посмотреть следующее видео или прочитать письменное руководство ниже.
Загрузите модель Simulink из примера здесь:

Модель Simulink — ПИД-регулятор
1 файл(ы) 538,71 КБ СкачатьНайдите и загрузите 3D-модель механизма захвата робота по следующей ссылке:
Производственный процесс
- Будущее робототехники
- Противозачаточные таблетки
- Модель поезда
- Промышленный робот
- Учебное пособие - sPiRobot:контролируйте и смотрите, что видит ваш робот из любого места
- Утилизация сортировочного робота с помощью Google Coral
- MATLAB — Симулинк
- Основные принципы ПИД-регулирования и настройки контура
- ПИД-управление захватом робота в Matlab / Simulink
- Моделирование Solidworks и Matlab / Simulink