


Рука робота с контроллером
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
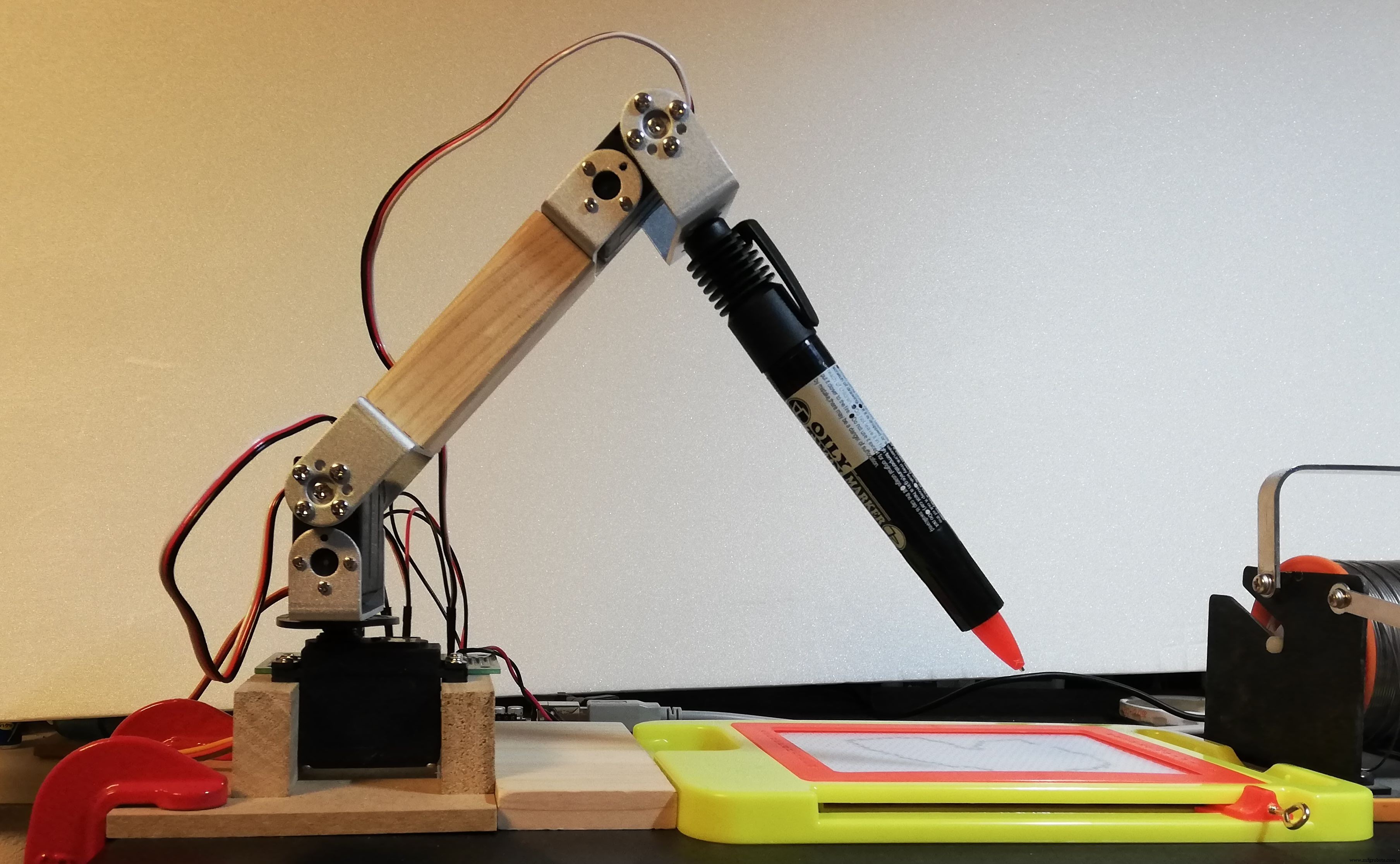
Сделал робот-манипулятор и его контроллер.
Конституция
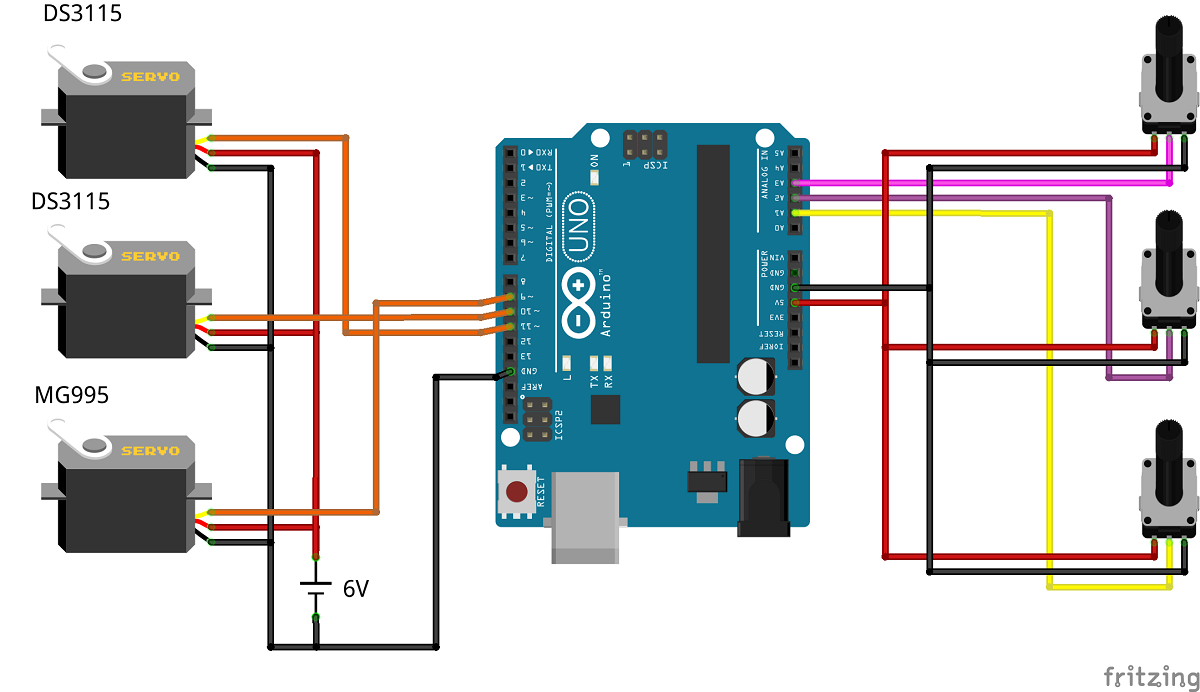
В манипуляторе робота используются три обычных сервопривода с ШИМ, и каждый угол регулируется переменным резистором. Поворотный потенциометр использовал кривую B 10 кОм.
Производство роботов-манипуляторов
Два серводвигателя DS3115 использовались в вертикальном направлении, а серводвигатель MG995 использовался в направлении поворота.
Контроллер производства
Сделал корпус контроллера с 3D-принтером.
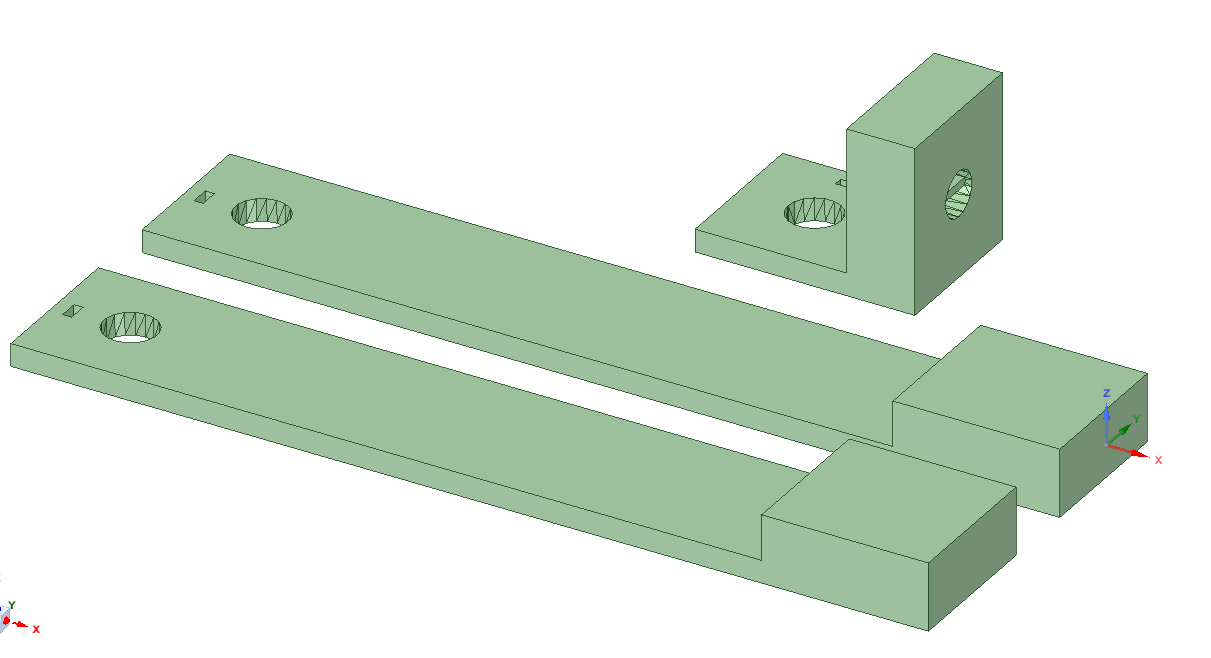
Предусмотрены отверстие и установочное отверстие для ввинчивания ручки поворотного потенциометра, а также вмятина для вставки ручки.

Соберите готовые детали и три поворотных потенциометра!
Поворотный потенциометр теперь расположен в том же направлении, что и ось вращения серводвигателя манипулятора робота!
Код Arduino
Этот простой код просто считывает значение поворотного потенциометра с помощью аналогового вывода, преобразует его в угол и вводит его в соответствующий сервопривод.
#include
Серво myservo1, myservo2, myservo3;
float th1 =90.0, th2 =90.0, th3 =90.0;
float val1, val2, val3;
void setup () {
Serial.begin (9600);
myservo1.attach (9, 500, 2420); // MG995
myservo2.attach (10, 820, 2140); // DS3115
myservo3.attach (11, 820, 2140); // DS3115
set_servo ();
}
void loop () {
val1 =analogRead (A1);
val2 =analogRead (A2);
val3 =analogRead (A3);
th1 =map (val1, 170.0, 880.0, 0.0, 180.0);
if (th1> =180.0) {
th1 =180.0;
} else if (th1 <=0.0) {
th1 =0.0;
}
th2 =map (val2, 150.0, 860.0, 0.0, 180.0);
if (th2> =180.0) {
th2 =180.0;
} else if (th2 <=0.0) {
th2 =0.0;
}
th3 =map (val3, 860.0, 160.0, 0.0, 180.0);
if (th3> =180.0) {
th3 =180.0;
} else if (th3 <=45.0) {
th3 =45.0;
}
set_servo ();
}
void set_servo ( ) {
myservo1.write (th1);
myservo2.write (th2);
myservo3.write (th3);
}
Операция
Завершите подключением поворотного потенциометра к Arduino!
Изготовленные на заказ детали и корпуса
Производственный процесс
- Мобильный робот с функцией обхода препятствий на основе обзора
- Робот Raspberry Pi с веб-управлением и видео
- Простой робот Pi
- Робот SCARA с двумя руками
- Дезинфекция робота ультрафиолетовым светом
- Unopad - MIDI-контроллер Arduino с Ableton
- Рука робота MeArm - Ваш робот - V1.0
- Токарный центр с манипулятором
- Robot сочетает в себе манипулятор для совместной работы с мобильной платформой
- Servo Motion улучшает работу роботов