


Дезинфекция робота ультрафиолетовым светом
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 |
Необходимые инструменты и машины
 |
|
Об этом проекте
Знакомство с роботом
Ультрафиолетовый бактерицидный робот (УФ-робот) - робот с дистанционным управлением, оснащенный системой УФ-излучения. Система состоит из движущегося транспортного средства-робота и контроллера наземной станции (GCS). Оператор может управлять роботом с помощью джойстика контроллера наземной станции (GCS), наблюдая за изображением с камеры робота.
Робот может дезинфицировать и уничтожать болезни, вирусы, бактерии и другие виды вредных органических микроорганизмов в окружающей среде с помощью ультрафиолета, разрушая их структуру ДНК. В настоящее время несколько стран успешно протестировали этих роботов для дезинфекции своих больниц, общественного транспорта, офисных помещений и других общественных мест. Мы внедрили этого УФ-робота экономичным способом, чтобы распространить процесс дезинфекции на общественные места.
Почему бы не использовать дезинфицирующие жидкости?

Самый распространенный и популярный метод дезинфекции общественных мест - это распыление дезинфицирующих жидкостей, которые состоят из 70% спирта. Недавно Всемирная организация здравоохранения (ВОЗ) объявила, что регулярно использовать дезинфицирующие жидкости в общественных местах действительно вредно. Это может вызвать проблемы с дыхательной системой из-за их сильного запаха, вызвать раздражение кожи и может привести к дисбалансу в окружающей среде.
Кроме того, этот метод связан с огромными ежедневными материальными и трудовыми затратами.
Преимущества УФ-робота
- Единовременные расходы (не нужно доливать спирт или хлорную жидкость).
- Может использоваться для дезинфекции поверхностей, медицинских костюмов, медицинских масок и другого медицинского оборудования.
- Сокращение времени дезинфекции на 60% по сравнению с методами дезинфекции на жидкой основе. (Время высыхания значительно увеличивается при использовании в среде, где доступны тканевые материалы).
- Возможность использования в среде с электронным оборудованием.
- Один оператор может покрыть большую площадь. (Нет необходимости в нескольких людях, как в жидких распылителях)
- Мы протестировали и доказали, что степень дезинфекции 99,997% для этого робота в сотрудничестве с микробиологической лабораторией местного университета. (Объяснено в последнем разделе)
Бактерицидное ультрафиолетовое облучение (УФГИ)
Ультрафиолетовое бактерицидное облучение (UVGI) - это метод дезинфекции, который использует коротковолновый ультрафиолетовый свет (ультрафиолет C или UVC) для уничтожения или инактивации микроорганизмов, разрушая нуклеиновые кислоты и разрушая их ДНК, делая их неспособными выполнять жизненно важные клеточные функции. UVC поглощается основаниями РНК и ДНК и может вызывать фотохимическое слияние двух соседних пиримидинов в ковалентно связанные димеры, которые затем становятся основаниями, не образующими пары.
UVGI используется в различных областях, таких как очистка пищевых продуктов, воздуха и воды. UVGI можно использовать для предотвращения распространения некоторых инфекционных заболеваний. Ртутные газоразрядные лампы и светодиоды низкого давления обычно используются в приложениях UVGI и излучают коротковолновое ультрафиолетовое излучение C (100–280 нанометров), в основном на длине волны 254 нм.
Каждому типу микроорганизмов требуется своя дозировка ультрафиолетового излучения для деактивации его функций. Учитывая ситуацию с Covid-19, здесь рассматривается инактивация того же вируса УФ-светом. В большинстве исследовательских работ и статей исследовательские группы упоминали необходимый ультрафиолетовый свет для процесса стерилизации в единицах «Джоуль на квадратный метр» или «Джоуль на квадратный сантиметр». Но при рассмотрении параметров и спецификаций УФ-излучения производители указали интенсивность УФ-излучения в единицах «Микроватт (мкВт) на квадратный сантиметр» на расстоянии 1 метра.
Единица «Ватт (Вт)» представляет собой энергию, излучаемую в течение одной секунды. Микроватт на квадратный сантиметр - это энергия, прошедшая через площадь в один квадратный сантиметр за одну секунду.
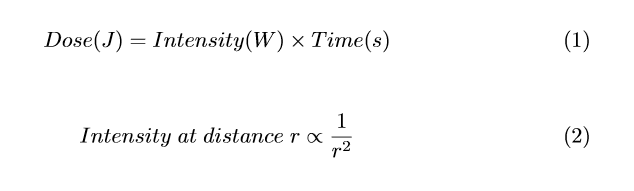
Уравнение 1 показывает соотношение между дозировкой и интенсивностью. В нем делается вывод о том, что можно получить разные дозировки, варьируя время воздействия одного и того же источника ультрафиолетового света.
Соотношение между интенсивностью УФ-излучения и расстоянием показано уравнением 2 . Исходя из этого, можно сделать вывод, что интенсивность УФ-излучения уменьшается с увеличением расстояния от источника света.
Согласно Википедии, доза 8 мДж может инактивировать большинство вирусов.
Понимание функций робота
Система в целом немного сложна, поскольку мы добавили некоторые функции и функции безопасности в соответствии с отраслевыми стандартами. Прежде чем объяснять процедуру внедрения, полезно понять, как работает система.
Робот состоит из трех основных компонентов.
1. Наземный транспорт

Эта часть приводится в движение двумя колесами с мотор-редукторами постоянного тока (робот с дифференциальным приводом). Спереди и сзади есть два поворотных колеса для поддержания баланса. Мы разместили электронную систему управления и аккумулятор, свинцово-кислотный аккумулятор 12 В 35 Ач внутри наземного транспортного средства.
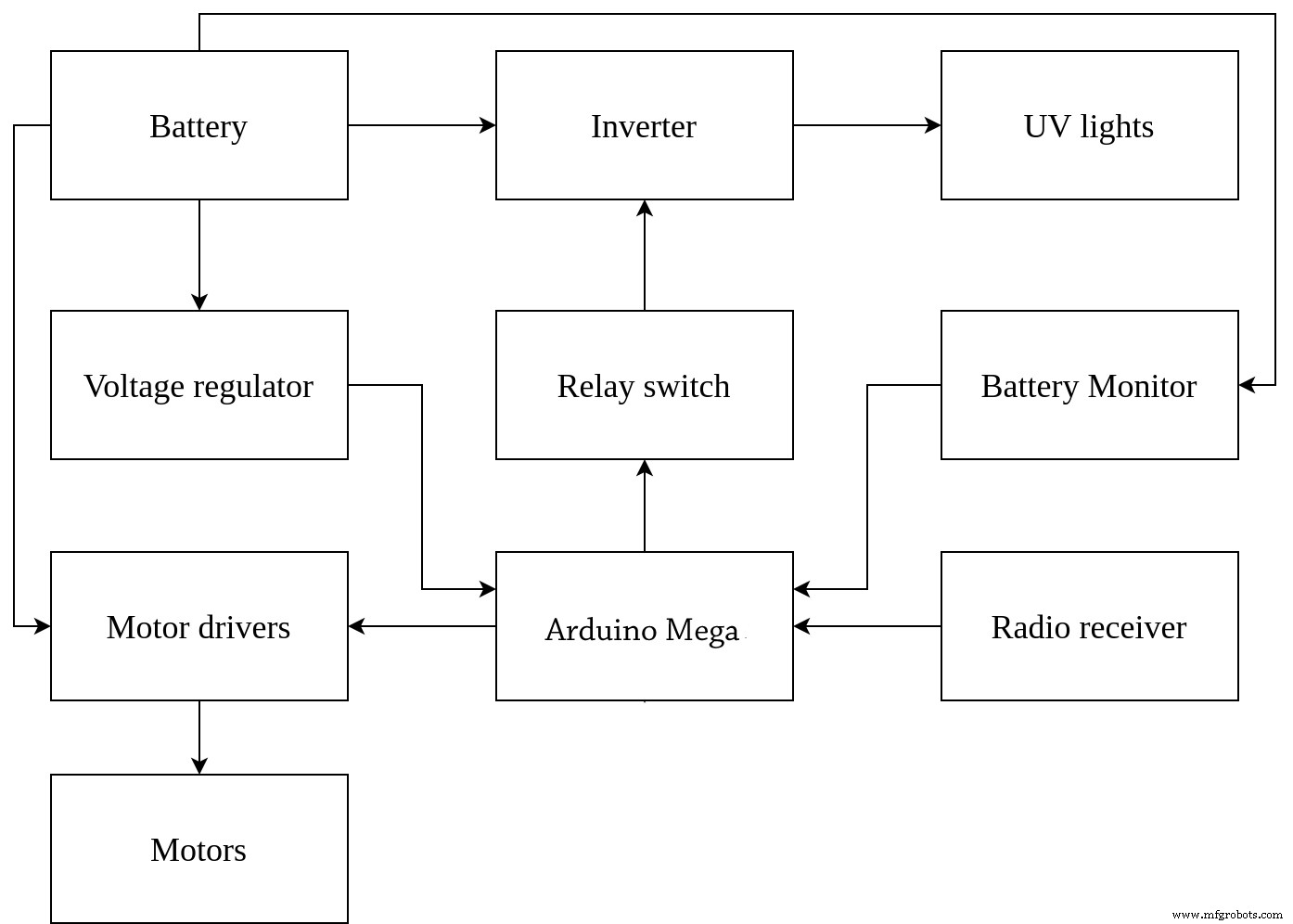
Arduino Mega питается от основной батареи через модуль регулятора напряжения, снижающий напряжение с 12 В до 5 В. К плате Mega подключен четырехканальный RC-радиоприемник с выходами PWM. Двигатели приводятся в движение через двухканальный драйвер двигателя H-моста, подключенный к плате Arduino. Инвертор подключается между УФ-лампами и батареей и управляется с помощью релейного переключателя, подключенного к плате Arduino.
2. Башня ультрафиолетового излучения
Мы использовали люминесцентные УФ-лампы, которые требуют отдельного электронного балласта для питания лампы. Световая мачта содержит 6 УФ-ламп, которые размещены вокруг алюминиевого цилиндра, сделанного из алюминиевого листа путем его прокатки. Этот алюминиевый цилиндр действует как отражатель УФ-лучей.
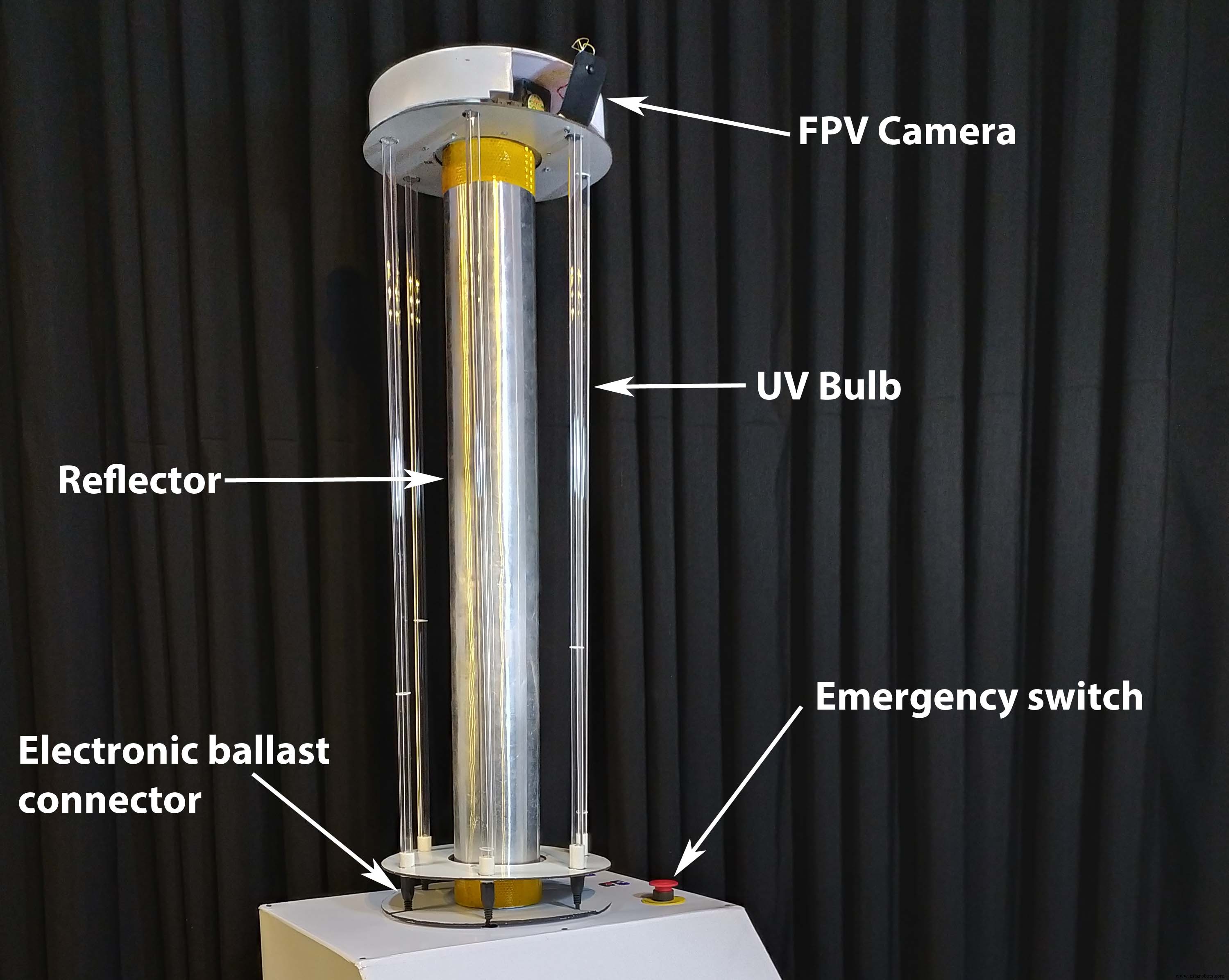
Все электронные балласты размещены внутри алюминиевого цилиндра. На вершине башни есть камера FPV и передатчик FPV для передачи видеопотока на GCS. УФ-вышка закреплена на наземной машине.
3. Контроллер наземной станции

Это пульт дистанционного управления робота. На экране отображается обратная связь камеры, полученная от робота. Джойстик используется для перемещения робота. УФ-свет можно включать и выключать с помощью УФ-переключателя. Выключатель постановки на охрану действует как предохранительный выключатель. Урезает все функции при включении.
Включение УФ-излучения

Для нашего робота мы выбрали 6 УФ-ламп со следующими характеристиками.
- Мощность - 55 Вт
- Длина волны - 254 нм
- длина - 890 мм
- диаметр трубы - 15 мм.
- тип - односторонний, 4-контактный
Это не строгие спецификации, кроме длины волны. Блок электронного балласта подключается к 4 контактам УФ-лампы. УФ-лампы загораются, когда на электронный балласт подается питание.
*** УФ-свет вреден для кожи и глаз человека. Не подвергайте глаза и кожу длительному воздействию. Наблюдение за светом через стекло - самая безопасная процедура, поскольку ультрафиолетовый свет не может проникнуть через прозрачное стекло. ***
Видеосистема FPV
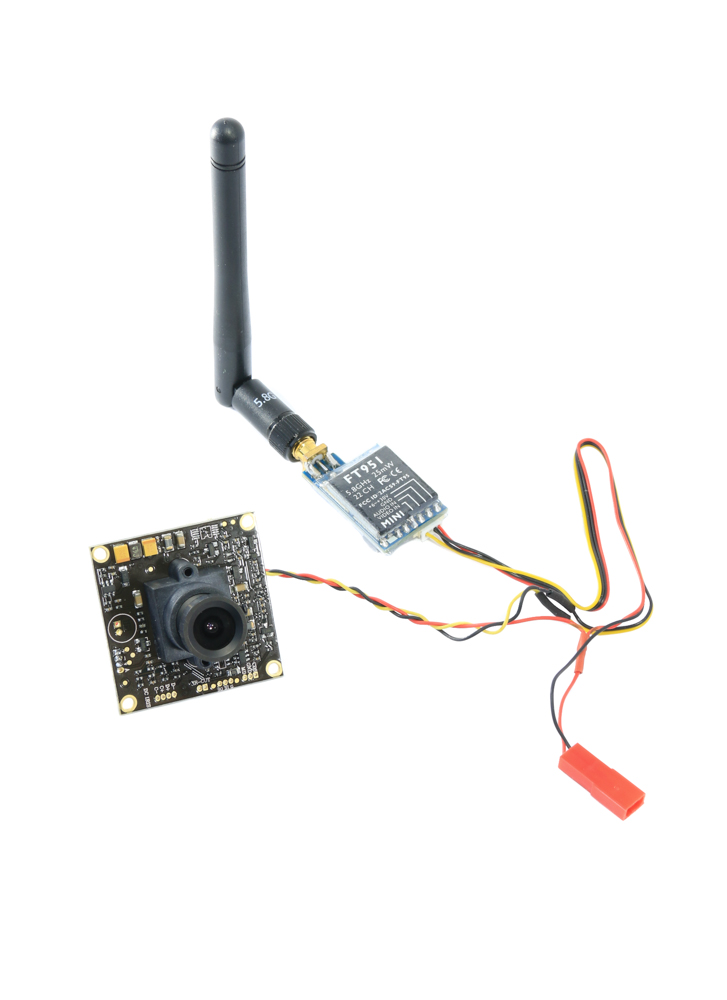

FPV видеосистемы в основном используются в дронах для просмотра с высоты птичьего полета. В нашем случае использование системы FPV упрощает получение видеопотока от робота без какого-либо программирования или пайки компонентов. У робота есть камера и видеопередатчик. Нам нужно только подключить питание к этой системе, и она начнет передачу видеопотока на частоте 5,8 ГГц.
GCS имеет ЖК-экран со встроенным видеоприемником 5,8 ГГц. Как только вы включите экран, он начнет показывать изображение с камеры.
Строительство наземной техники
Основная конструкция сделана из стальных коробчатых стержней 0,75 дюйма. Ниже приведен дизайн, используемый для нашего робота, но не ограничивайтесь им. Измените дизайн в соответствии с вашими требованиями.
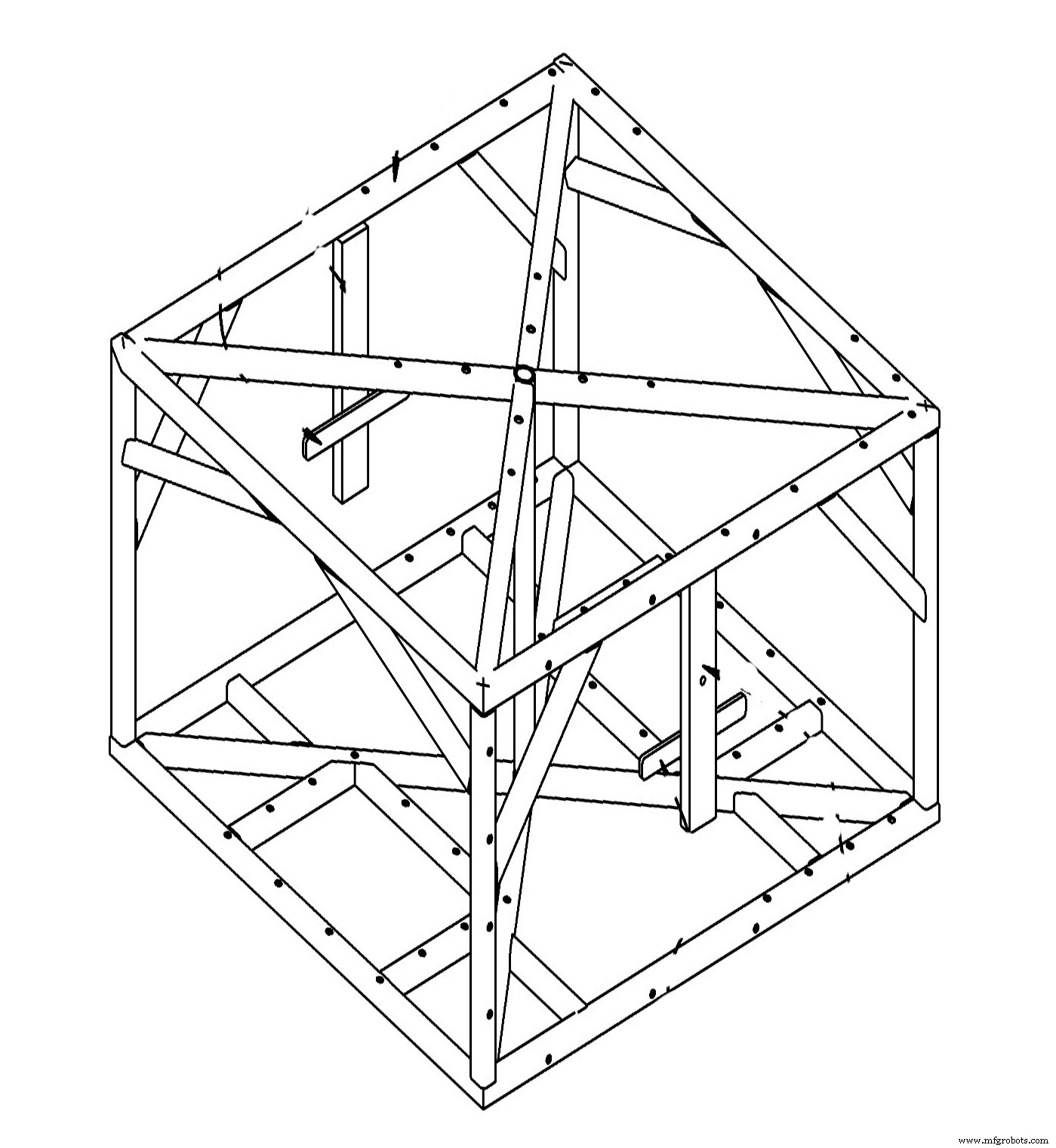
В раме должно быть место и механизм для установки двух двигателей и двух колесиков внизу. Внутри конструкции должен быть механизм блокировки свинцово-кислотного аккумулятора. В нашем роботе мы использовали облицовочные доски для покрытия рамы.
Провода двух двигателей подключены к выходным контактам драйвера двигателя. Эту процедуру можно легко найти в Интернете, поэтому она не предназначена для описания всей процедуры.
Схема электронной системы управления прилагается в последнюю очередь. Канал 1 - канал 4 Сигнальные контакты ШИМ RC-приемника подключены к плате Arduino через контакты 18–21. Каждый канал настроен в коде следующим образом. Вы можете изменить его по своему желанию.
- Ch 1 - УФ-переключатель
- Глава 2 - Переключатель включения робота
- Глава 3 - Команды движения вперед / назад
- Глава 4 - Команды поворота влево / вправо
Это также можно изменить при создании GCS.
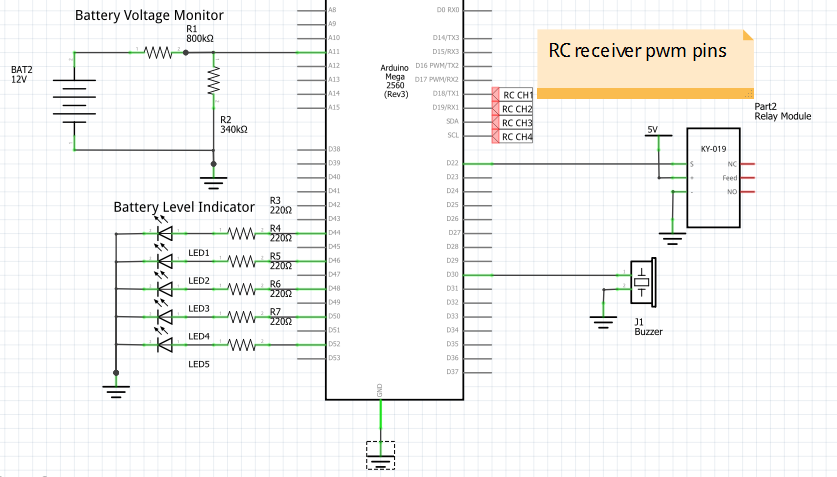
Контакты драйвера двигателя подключены к контактам 3–11 Arduino, как показано на схеме.
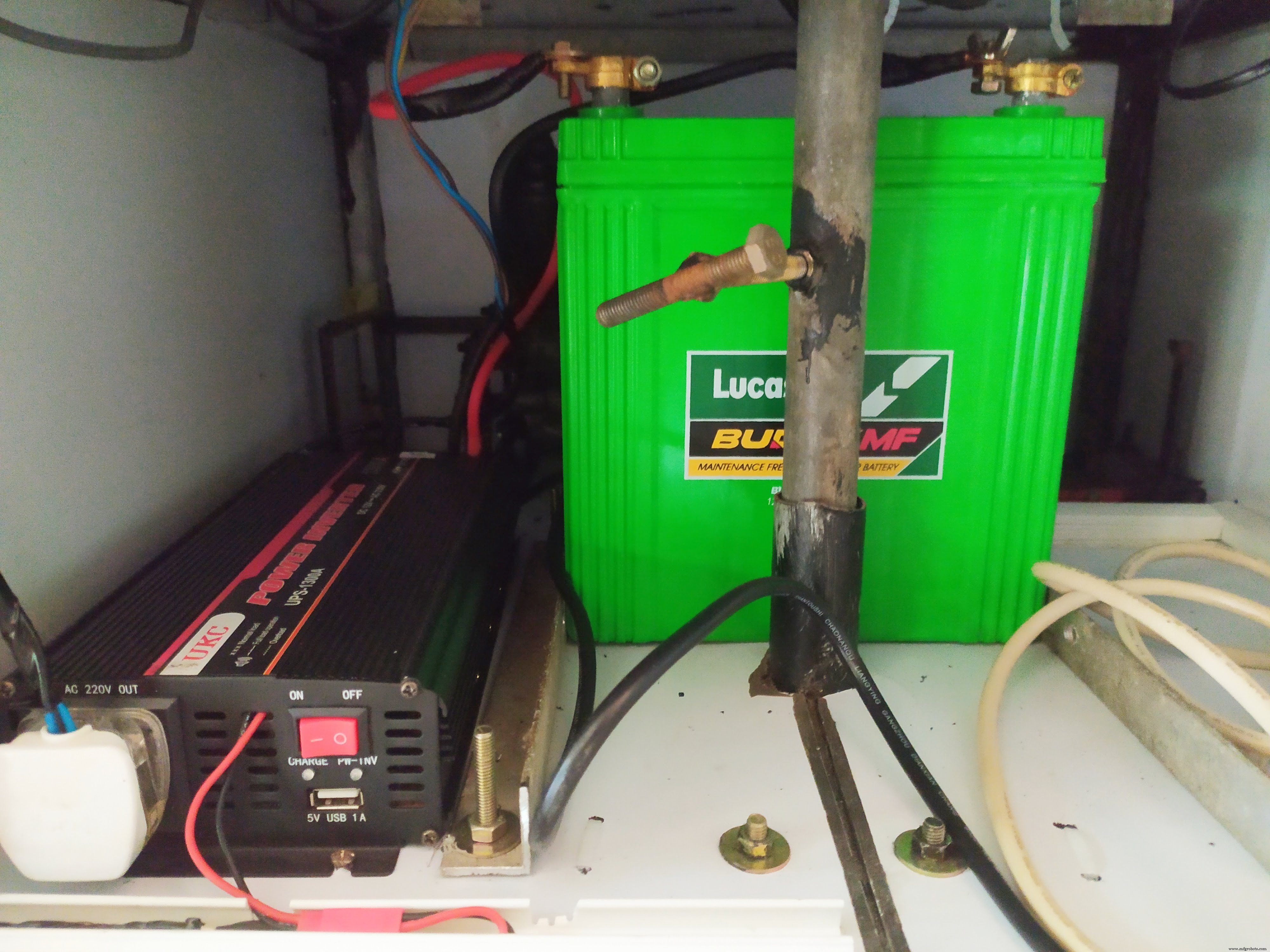
Чтобы преобразовать 12 В в 230 В переменного тока для питания ультрафиолетовых ламп, здесь используется схема инвертора. Мы приобрели серийно выпускаемый инверторный блок со встроенным зарядным устройством. Это помогает избежать сложности электронной системы, позволяя заряжать свинцово-кислотную батарею, используя существующие электрические розетки.

В нашем случае мы использовали модифицированный синусоидальный инвертор с КПД около 70%. Для питания всех электронных балластов с КПД 70% необходимая мощность инвертора составляет 470 Вт. Со всеми запасами прочности мы приобрели инвертор мощностью 1 кВт.
Клеммы аккумулятора подключены к входу 12 В, а балласты E. - к выходным портам переменного тока. Выключатель удален. В переключателе доступно 3 провода; общий провод, провод заземления и провод питания. Эти 3 провода подключаются к релейному переключателю следующим образом для управления УФ-излучением с платы Arduino.
- Общий провод -> Общий
- Заземляющий провод -> НЗ
- Питание включено -> НЕТ
Мы включили выключатель питания системы, выключатель УФ-излучения и выключатель аварийного отключения, чтобы обеспечить соответствие робота промышленным стандартам.
Строительство башни ультрафиолетового излучения
Средняя часть башни содержит алюминиевый лист. Из листа раскатывают цилиндр диаметром 15 см. Сверху и снизу цилиндра кладут две облицовочные доски круглой формы диаметром 30 см. Они используются в качестве держателя УФ-лампы. В обеих облицовочных плитах просверлены 19-миллиметровые отверстия для УФ-излучения. Балласты E. фиксируются внутри алюминиевого цилиндра с помощью двусторонних клейких лент.


Система камеры FPV устанавливается наверху башни, и два провода проходят вниз через цилиндр.
Строительство наземной станции управления

Ниже приведены компоненты, необходимые для наземной станции управления (GCS).
- RC-передатчик, 4 канала, 2,4 ГГц
- Экран FPV
- 2 X тумблеров
- 1 выключатель питания
- 18650 батарейных элементов
- Модуль системы управления батареями с 3 батареями для 18650
- Импульсный источник питания 12 В, 5 А
Радиоуправляемый передатчик содержит 2 джойстика и несколько переключателей. Здесь нас интересуют только один джойстик, схема и светодиодный индикатор. Снимите корпус передатчика и посмотрите, как джойстики воспринимаются схемой. Каждый джойстик содержит два потенциометра, подключенных к печатной плате. В зависимости от положения джойстика потенциометр изменяет свое сопротивление, так что схема может считывать положение джойстика.
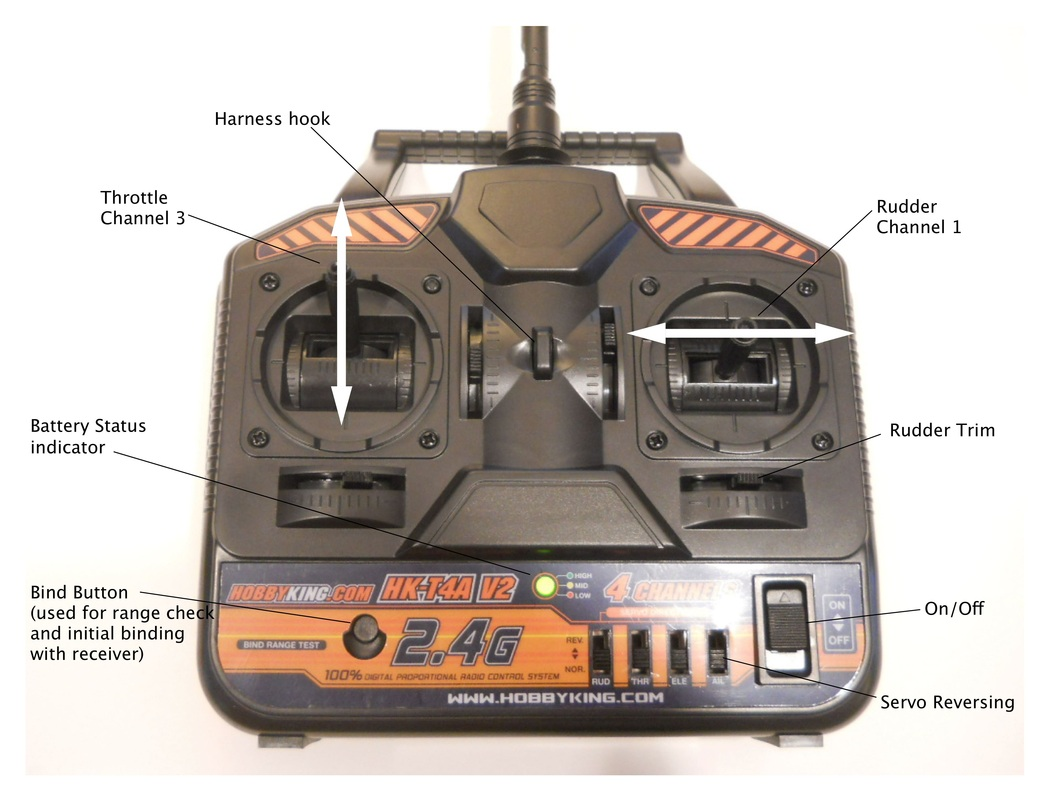
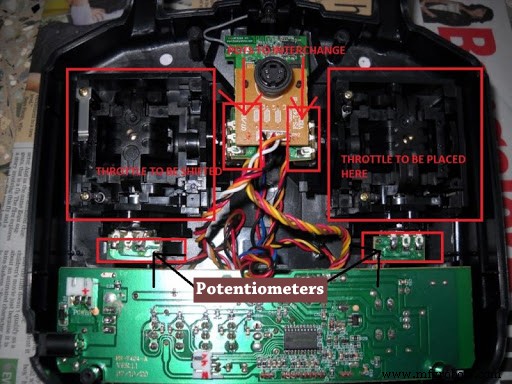
Снимите один джойстик и два его потенциометра. Припаяйте соответствующие концы проводов к двум тумблерам. Теперь у нас есть один джойстик и два тумблера для управления всеми 4 каналами. Один переключатель действует как переключатель постановки робота на охрану, а другой - как переключатель управления УФ-светом. Светодиодный индикатор можно использовать в качестве монитора батареи GCS, поскольку он меняет свой цвет на красный, когда батарея разряжена.
Теперь нам нужно сделать блок питания для передатчика и для экрана FPV. Напряжение ячеек батареи 18650 составляет 3,7 В. При полной зарядке становится 4,2 В. Для этого мы последовательно соединяем 3 ячейки, чтобы получить около 12 В. В нашем случае мы использовали элементы емкостью 1000 мАч. Чтобы увеличить время работы GCS, мы использовали 9 батарей, 3, последовательно соединенных набора ячеек, параллельно, чтобы получить емкость 3000 мАч. Затем подключил модуль BMS для защиты аккумулятора.
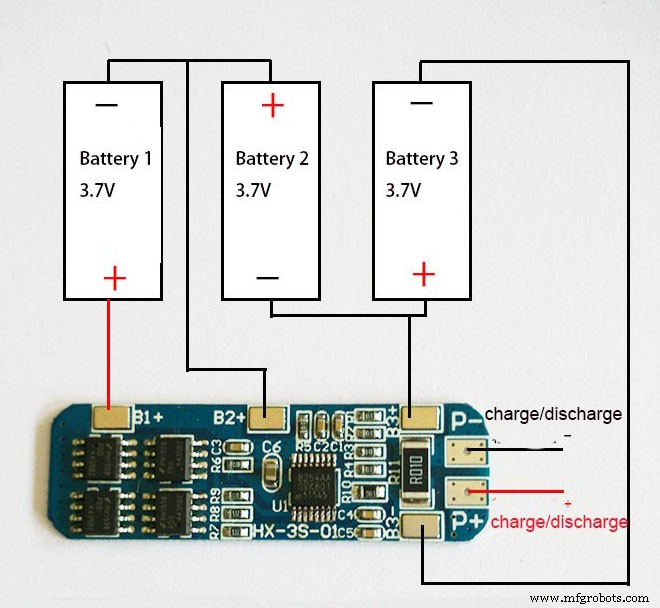
P + и P- подключены к входу питания передатчика и входу питания экрана FPV. Импульсный источник питания 12 В (импульсный источник питания) поставляется с потенциометром для регулировки выходного напряжения в ограниченном диапазоне. Установите его на 12,8 и подключите выход напряжения к P + и P- BMS. Это поможет зарядить аккумулятор при подключенном SMPS.
Вы можете спроектировать для этого корпус по своему усмотрению.
Кодирование
Первой задачей кода является считывание входов RC-канала. Поскольку мы используем приемник ШИМ, я использовал прерывания для чтения значений ШИМ. Чтобы упростить задачу, я включил библиотеку PWM для использования прерываний, определив подключенный вывод следующим образом.
ШИМ канал1 (18); // Настраиваем вывод 18 для входа
PWM ch2 (19); // Настройка вывода 19 для входа
PWM ch3 (20); // Настраиваем вывод 20 для входа
PWM ch4 (21); // Настраиваем контакт 21 для ввода В последовательности запуска код проверяет напряжение батареи и включен ли УФ-переключатель. При обнаружении одного из них процедура запуска будет ждать, пока все не будет исправлено.
// проверяем напряжение батареи
battery_voltage_monitor ();
while (batterylow ==true) {
battery_voltage_monitor ();
low_battery_notification ();
}
// проверяем, что выключатель ультрафиолетового излучения выключен
rc_read ();
while (uv_pwm> switch_on_pwm) {
rc_read ();
uv_on_warning_at_startup (); // сигнал зуммера
} При работе моторов напряжение аккумуляторной батареи критически падает только на этот момент. Чтобы избежать срабатывания сигнала тревоги о низком напряжении каждый раз, когда мы перемещаем робота, часть контроля заряда батареи работает только тогда, когда робот не движется.
if (robot_moving ==false) {
battery_voltage_monitor (); // отслеживаем заряд батареи, когда робот не движется
} Все остальные функции, включая управление приводом двигателя, генерацию звукового сигнала с помощью зуммера и управление реле, работают в обычном режиме. Вы можете следовать общему руководству по вышеуказанным темам, если они вам не известны.
Рабочие процедуры
Процедура включения
Контроллер GCS
1. Включите главный выключатель.
2. Убедитесь, что выключатель включения робота и выключатель ультрафиолетового излучения выключены. (В нижнем положении).
Робот
1. Включите выключатель питания.
2. Дождитесь сигнала запуска.
3. Дождитесь звукового сигнала "ОК".
Управление роботом
1. Включите переключатель постановки робота на охрану.
2. Переместите джойстик, чтобы переместить робота.
3. Включите УФ-переключатель, чтобы включить УФ-свет. Когда переключатель постановки робота на охрану находится в выключенном положении, УФ-переключатель не работает.
Индикатор уровня заряда батареи
1. Убедитесь, что на батарее мигает не менее 4 полосок для работы робота.
2. Когда батарея разряжена, раздается звуковой сигнал, при этом последние две полосы индикатора уровня заряда мигают.
Процедура зарядки
1. Выключите робота.
2. Выключите GCS.
3. Подключите инвертор к розетке. (Обычно инверторы имеют встроенный индикатор уровня заряда)
Общие соображения
1. Использование в людных местах
Ультрафиолет вреден для глаз и кожи человека. Воздействие света на короткие расстояния (менее 3 м) в течение более 60 секунд может повредить глаза и вызвать раздражение кожи. Однако ультрафиолетовые лучи не могут проникнуть через твердую среду. Ультрафиолетовое излучение через прозрачное стекло не влияет на человеческие глаза или тело.
2. Чувствительные материалы и устройства
Мягкие пластмассы очень чувствительны к ультрафиолетовому свету. Мягкий пластик обычно используется в игрушках и пищевых упаковках. Поэтому устройство нельзя использовать в магазинах игрушек, супермаркетах и в местах, где доступны указанные выше товары. Однако ультрафиолетовое излучение можно использовать для дезинфекции полов в вышеупомянутых областях.
3. Возможность использования в больницах
В больницах ультрафиолетовое излучение помогает дезинфицировать поверхности с сильным касанием за очень короткое время. Но в этом сценарии следует учитывать эффективность ультрафиолетового излучения для медицинского оборудования и лекарств.
Медицинское оборудование с пластиковым корпусом изготавливается из твердой пластмассы, так как в процессе производства оно подвергается лучевой обработке. Кроме того, нет доказательств эффективности УФ-излучения для лекарств, хранящихся в больницах.
Кроме того, все медицинское оборудование из нержавеющей стали и маски N95 можно стерилизовать с помощью одного и того же устройства.
4. Эффективность для затененных участков
Ультрафиолетовый свет отражается от поверхностей так же, как и видимый свет. Следовательно, области, которые не получают прямой УФ-свет, получают отраженный УФ-свет. Однако сильно закрытые или затененные участки не получают эффективного УФ-излучения. Эти участки также не дезинфицируются методами на основе дезинфицирующих жидкостей.
5. Прочие соображения
Ультрафиолетовый свет выделяет озон при длительной работе в закрытых помещениях. Как правило, все закрытые помещения вентилируются в течение 20 минут после стерилизации УФ-светом.
Код
Код для Arduino Mega
https://github.com/tharindusuraj/Ultraviolet-Germicidal-RobotСхема
uv-x_Q9R5T59Q32.fzzПроизводственный процесс
- Мобильный робот с функцией обхода препятствий на основе обзора
- Робот для веб-камеры Raspberry Pi - лучшее руководство по потоковой передаче видео
- Робот Raspberry Pi с веб-управлением и видео
- Утилизация сортировочного робота с помощью Google Coral
- Робот с сервомотором избегает препятствий
- Автоматическая система полива растений с Arduino
- Государственный гимн США с подсветкой и звуком
- Управление манипулятором Arduino с помощью приложения для Android
- Видео:Сканирование точеного профиля в процессе — с помощью робота
- Токарный центр с манипулятором