


Управляемый Bluetooth робот для захвата и размещения
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Необходимые инструменты и машины
 |
|
Приложения и онлайн-сервисы
 |
| |||
 |
|
Об этом проекте
Введение
В этом руководстве показано, как создать робота для подбора и размещения, управляемого с помощью вашего Android-смартфона. Мы создали мобильное приложение на платформе MIT App Inventor. В этом уроке мы поговорим о каждой части этого проекта отдельно. Поговорим о:
- 1 Как управлять серводвигателем
- 2 Как управлять двигателем постоянного тока
- 3 Как использовать модуль Bluetooth
- 4 Как управлять роботом с помощью мобильного телефона
Так что я надеюсь, что это руководство охватывает все, что вам нужно для создания бота.
Сценарий
Прежде всего, мы должны знать, как робот будет принимать заказы. Мы используем модуль Bluetooth, который будет подключен к мобильному приложению, которое мы создадим позже. На данный момент нам нужно знать, что мы отправим нашу команду роботу с нашего мобильного телефона, используя соединение Bluetooth.

Аппаратное обеспечение
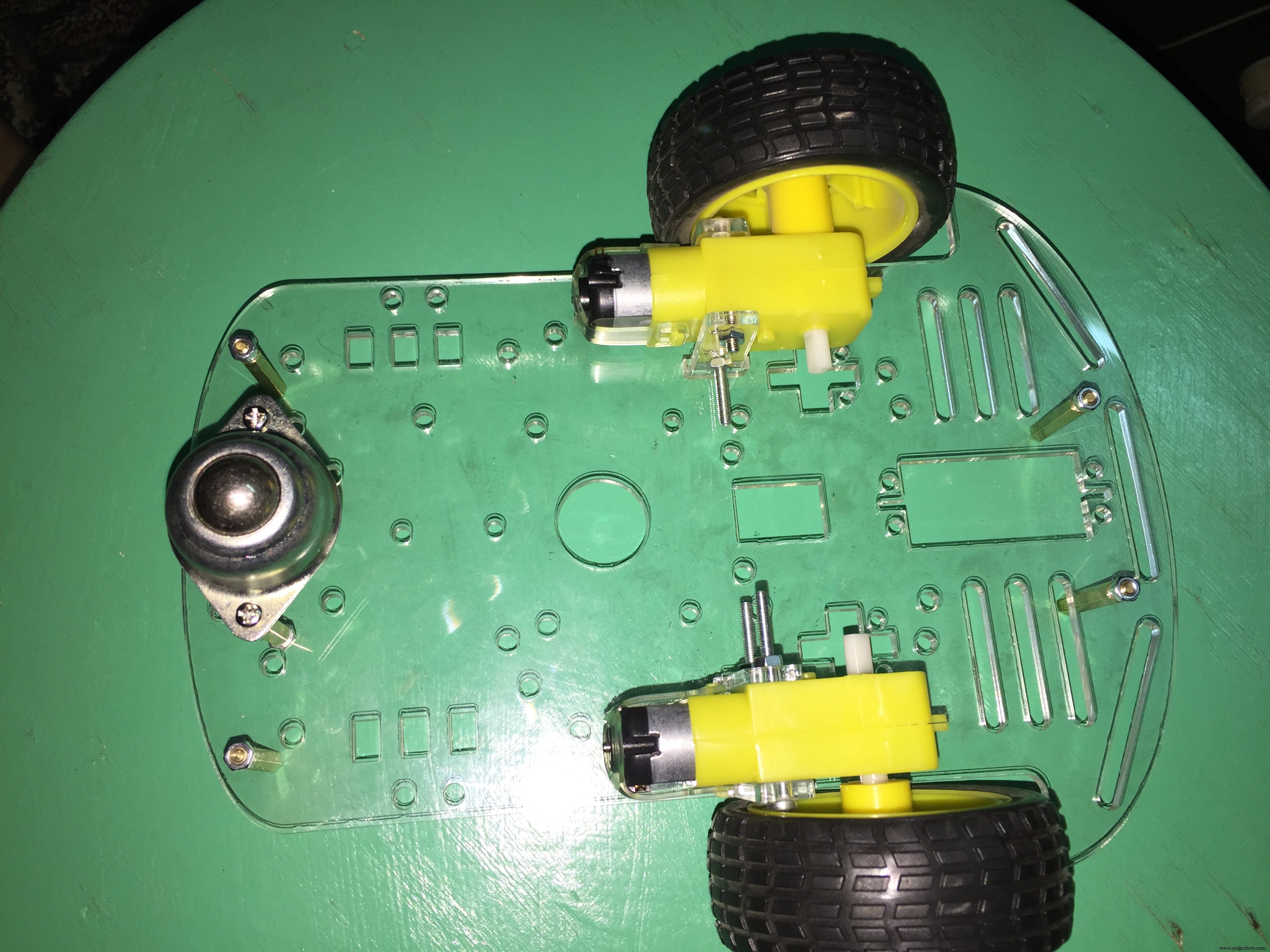
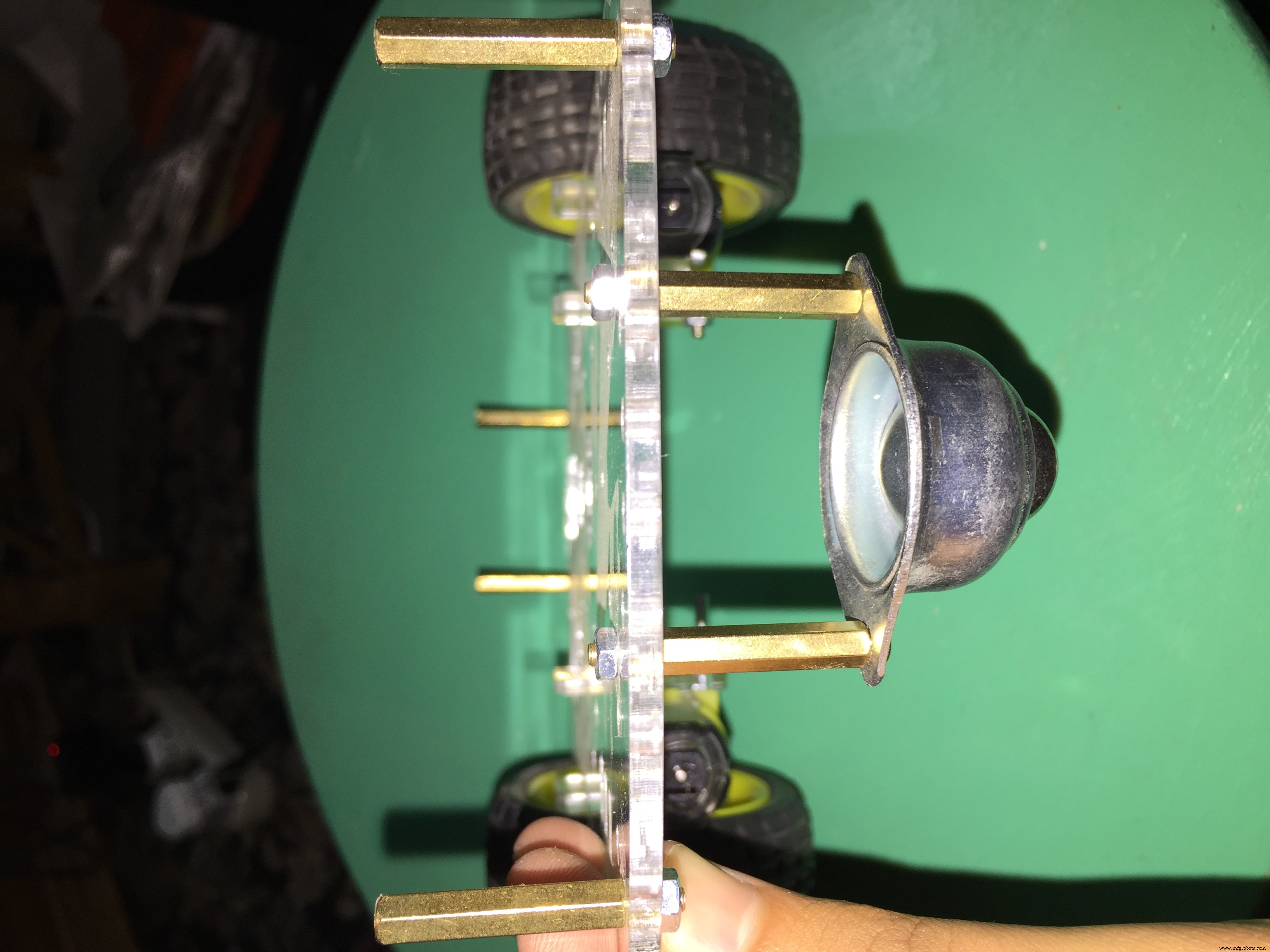
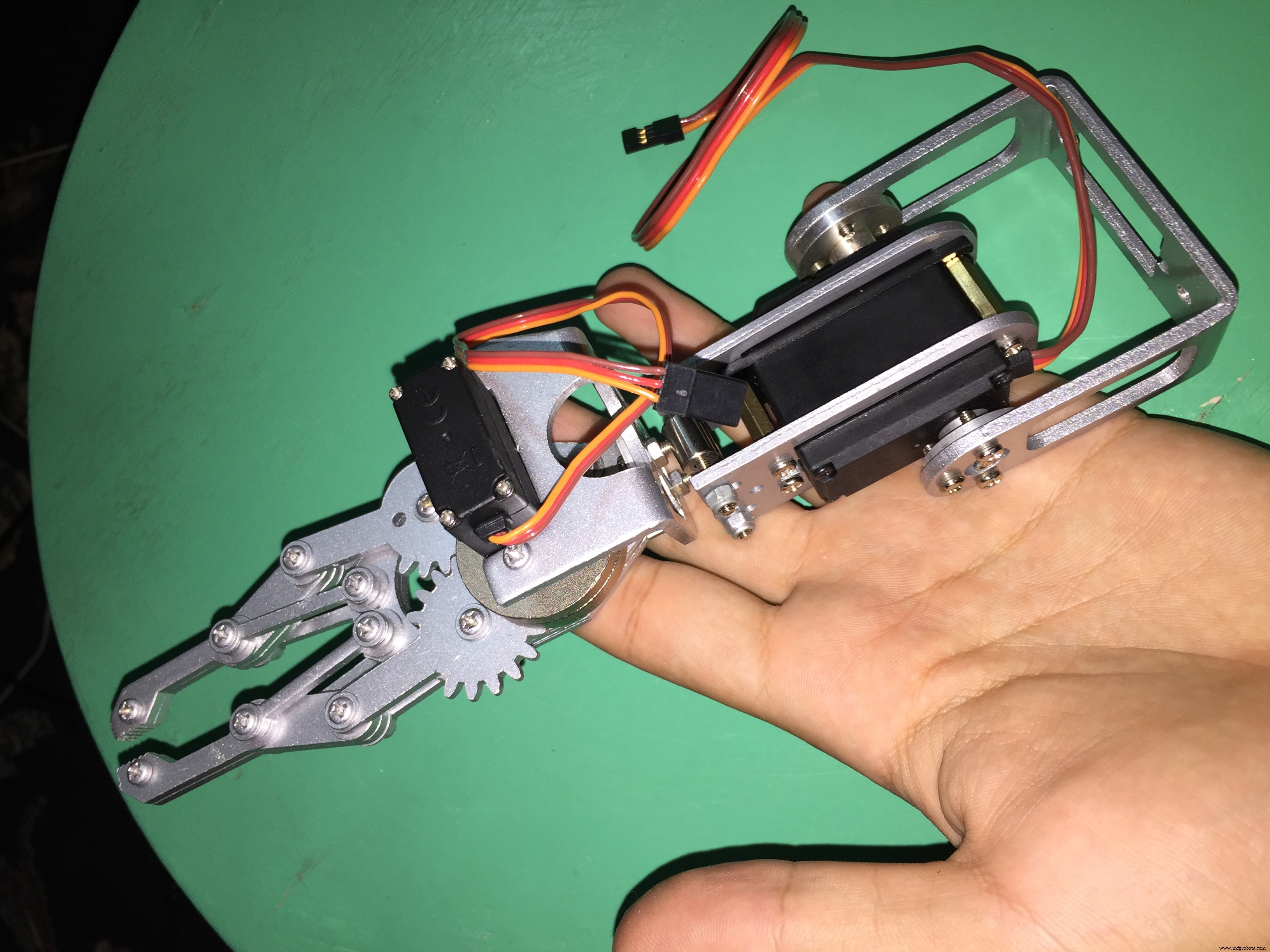
- Для набора требуется простая сборка, но это требует времени. Следуйте инструкциям по сборке, прилагаемым к вашему комплекту.
В конце сборки это должно выглядеть так:
Motor Shield позволяет вам общаться с вашими моторами. Если вы подключите двигатели напрямую к плате Arduino, это вызовет пожар! потому что каждому двигателю требуется не менее 80 мА, но максимальный ток, который может обеспечить цифровой вывод Arduino, составляет 40 мА, поэтому НЕ попробуйте подключить двигатель напрямую к плате Arduino.
- Моторный щит помогает вам контролировать направление вашего мотора (например, двигаться ВПЕРЕД, НАЗАД и ОТПУСК).
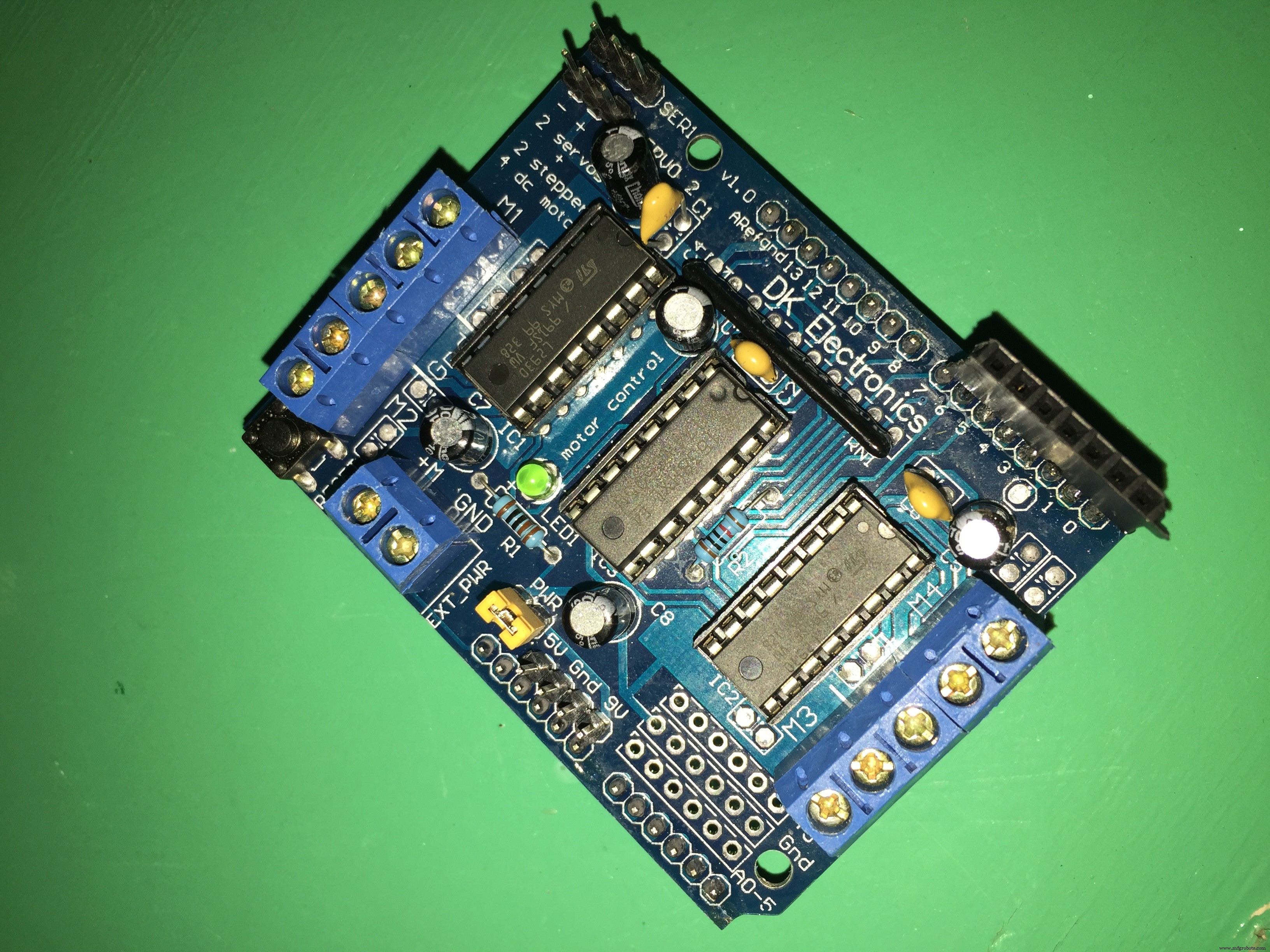
- Моторный щит позволяет управлять до 4-х двунаправленных DC двигатели с индивидуальным 8-битным выбором скорости (то есть разрешение около 0,5%).
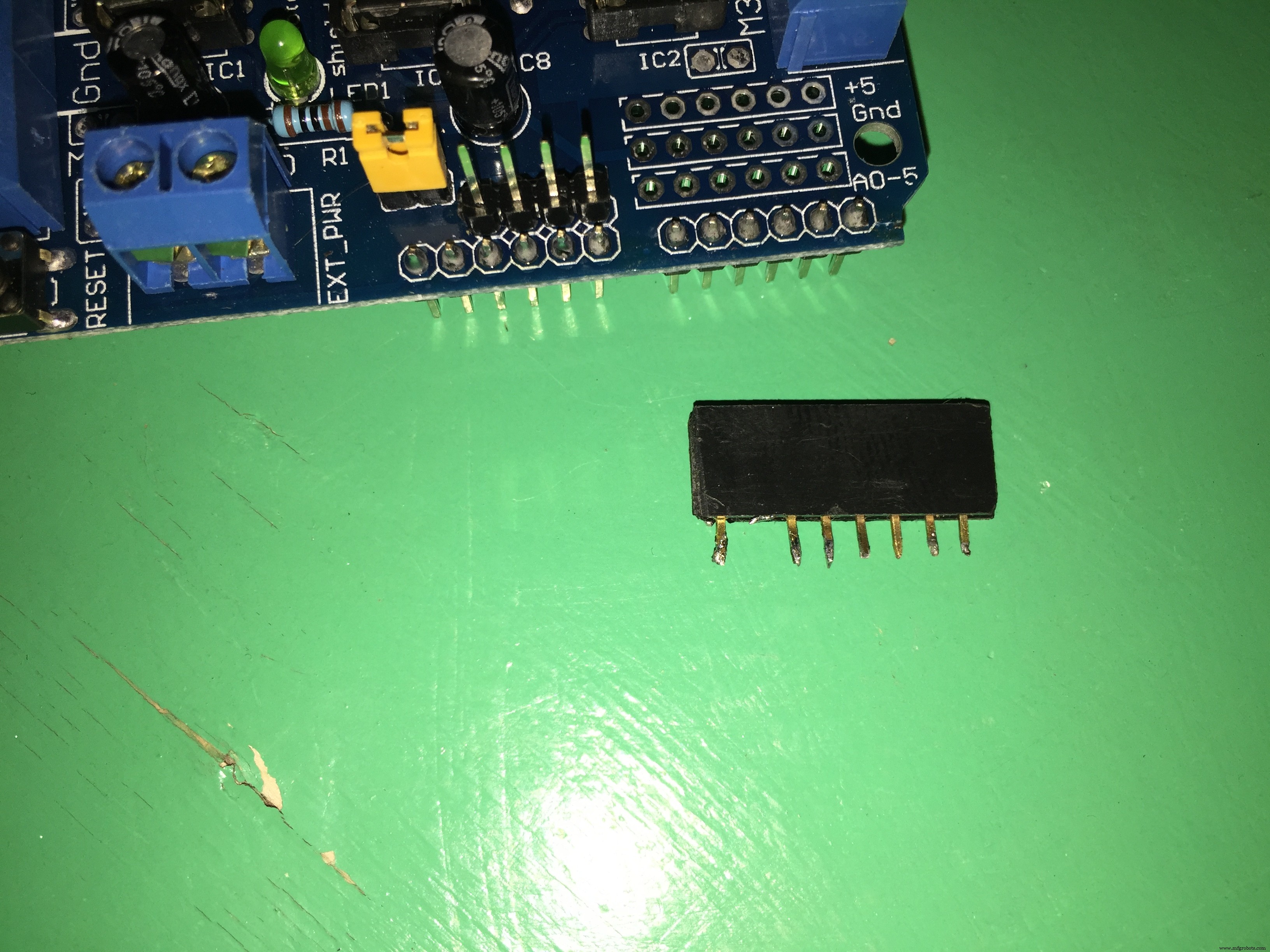
Вы можете припаять несколько разъемов к верхней части экрана, чтобы использовать контакты Arduino.

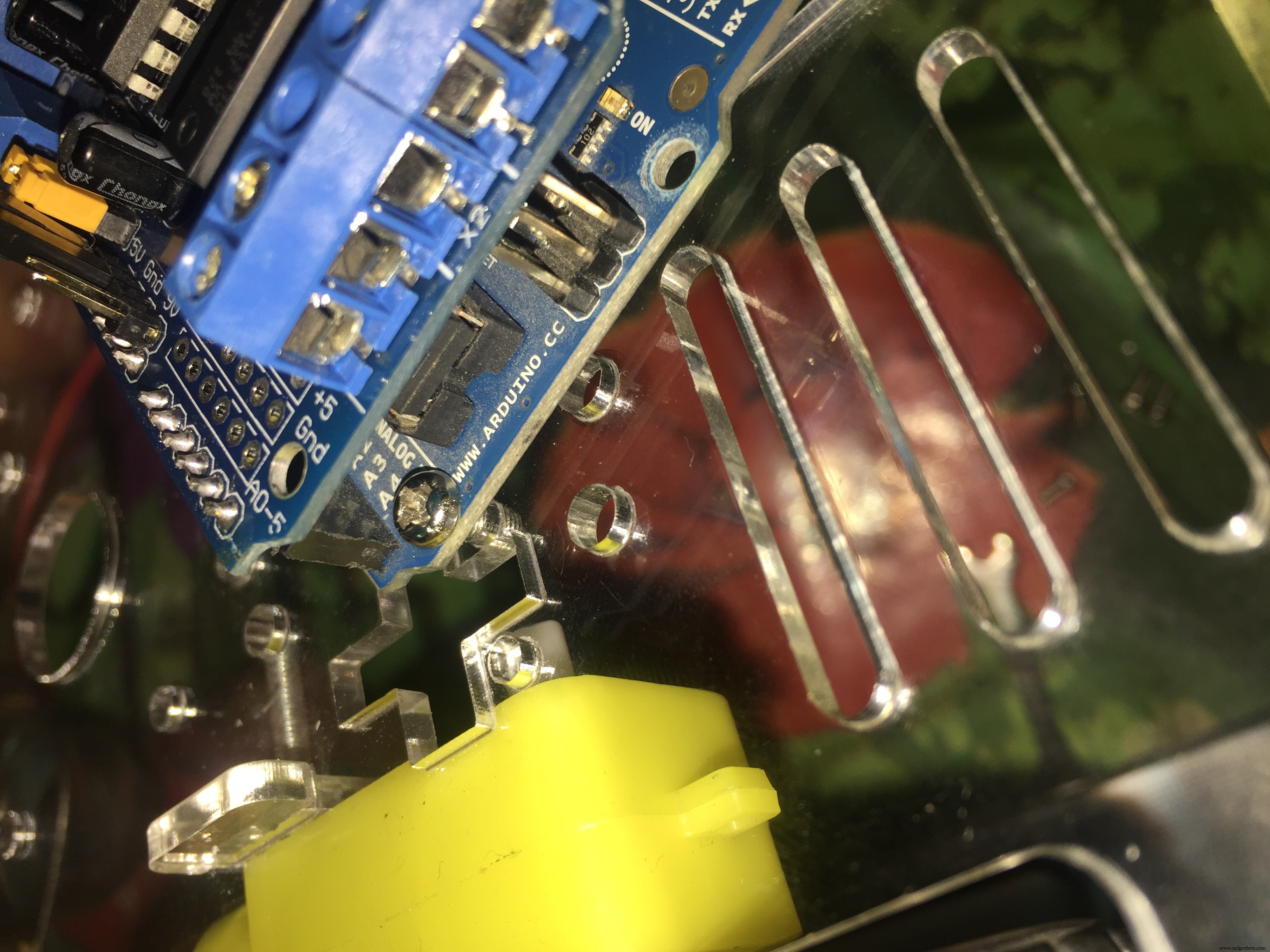
Вам нужно прикрепить моторный щит над платой Arduino следующим образом:
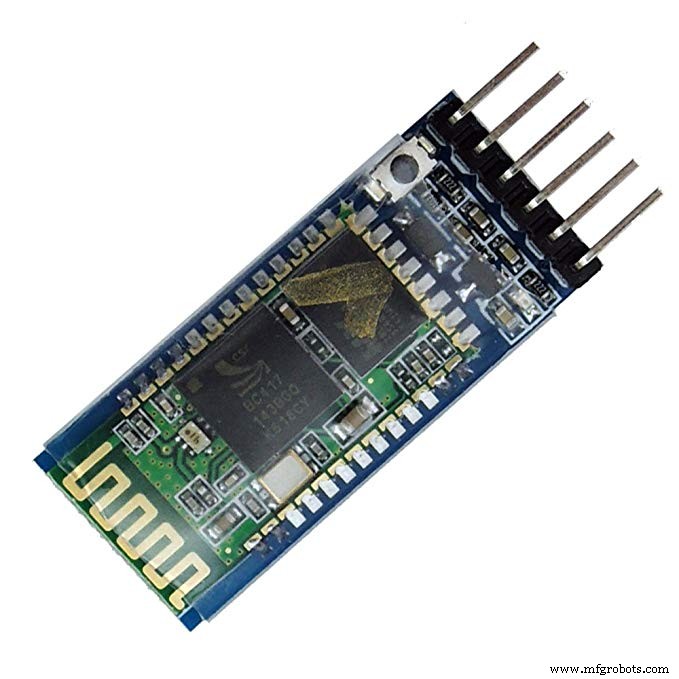
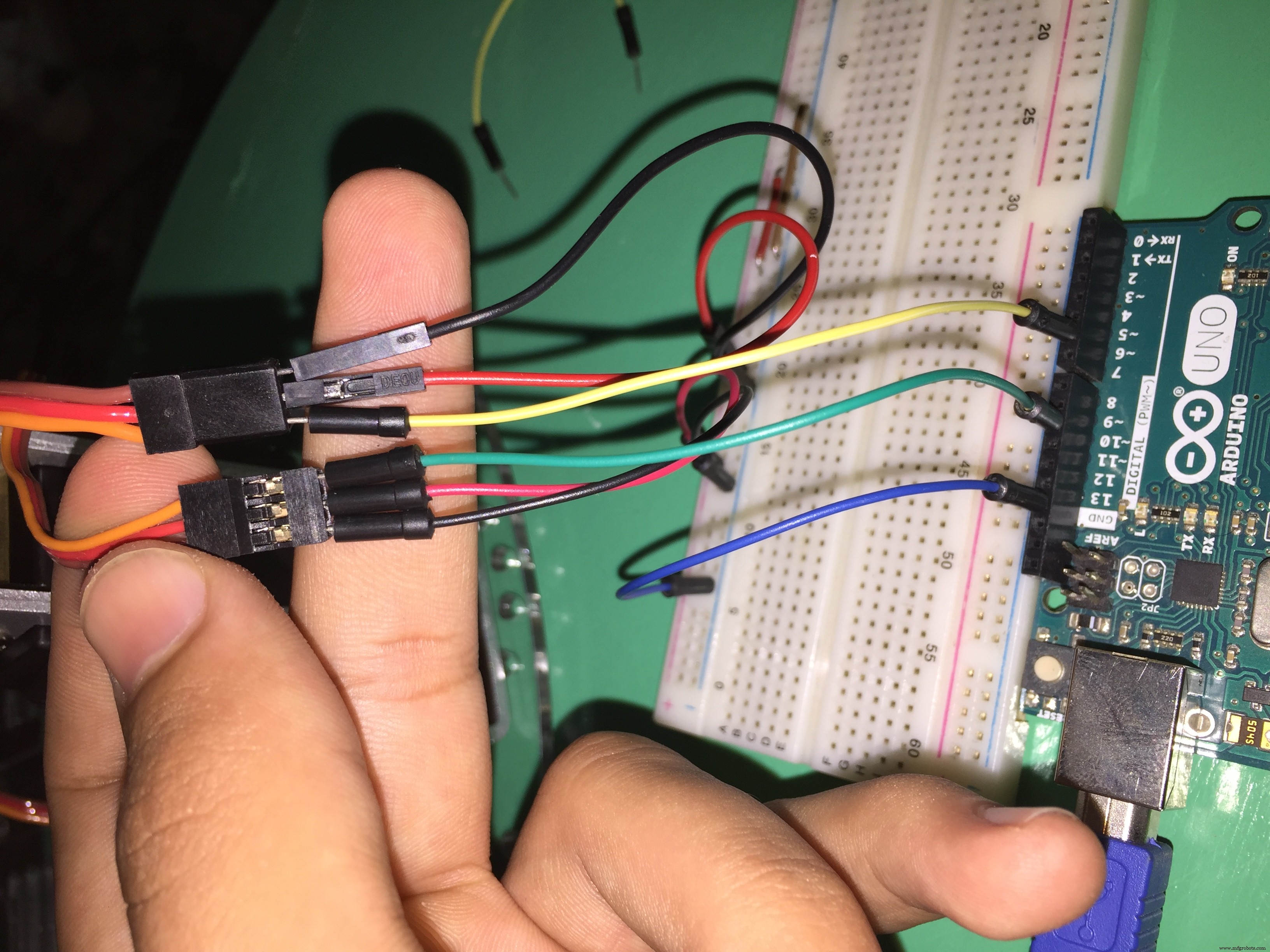
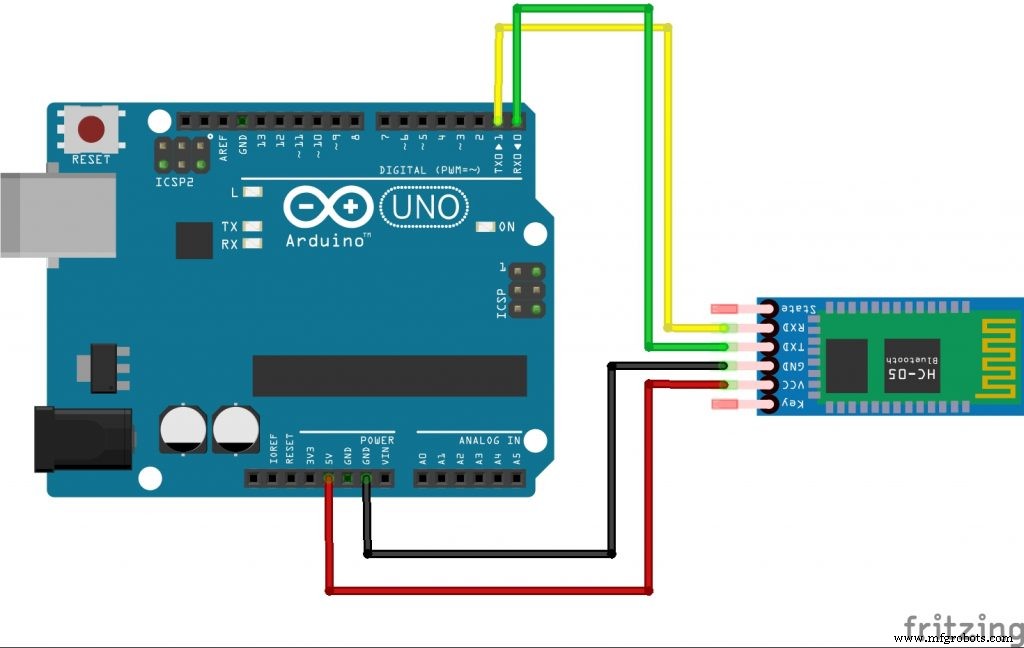
Модуль Bluetooth :это канал между пилотом и роботом для отправки приказов и выполнения действий.
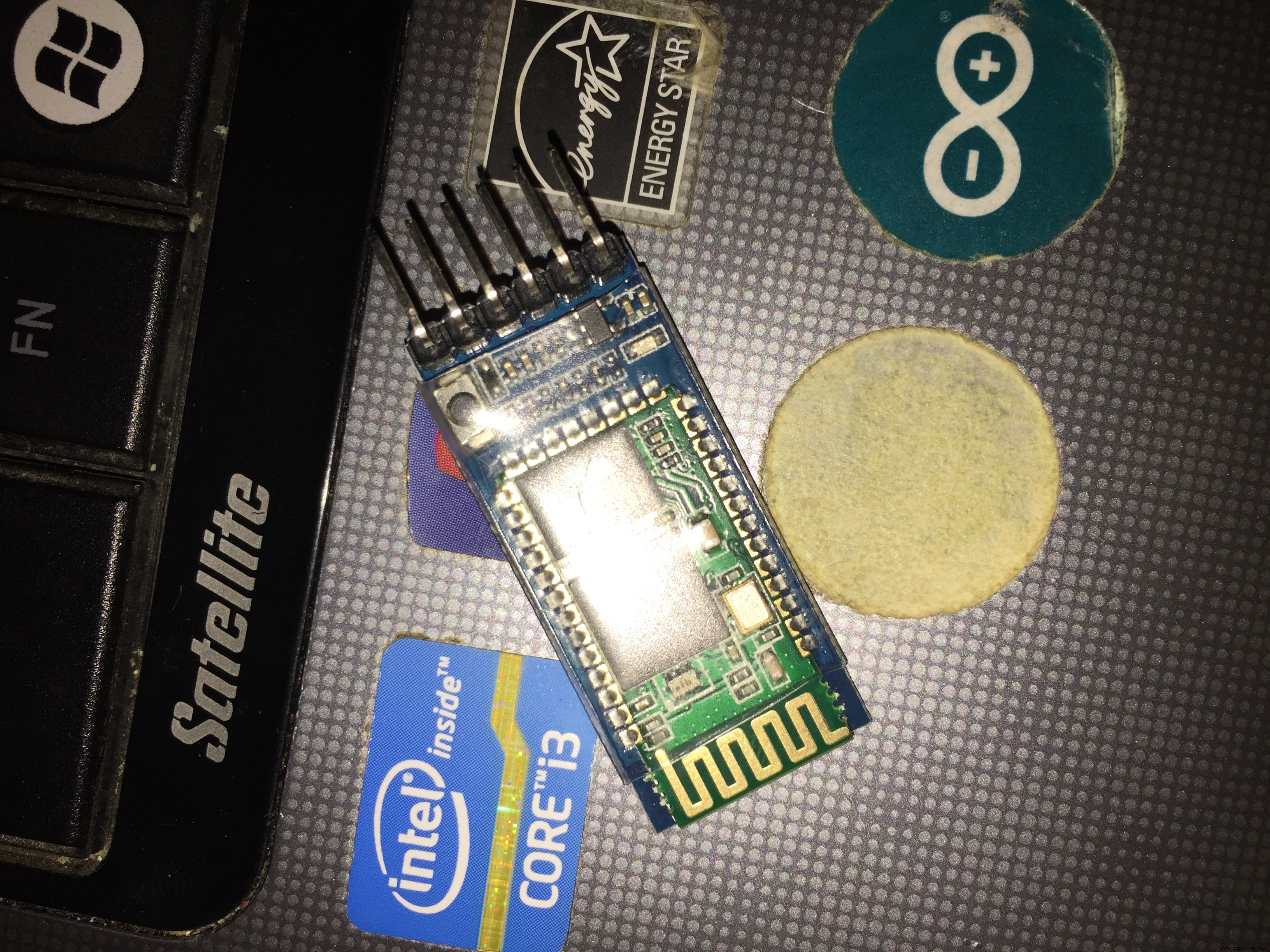
Имеет 6 контактов; мы будем использовать только четыре средних контакта (RX-TX-GND- + 5):

Подключим:
- +5 на модуле Bluetooth к 5В на Arduino
- GND на модуле Bluetooth к GND на Arduino.
- Rx на модуле Bluetooth к Tx на Arduino
- Tx на модуле Bluetooth к Rx на Arduino

ПРИМЕЧАНИЕ. ПОЧЕМУ Rx to Tx и Tx to Rx?
Поскольку модуль Bluetooth отправляет данные (Tx), а Arduino получает эти данные (Rx).
Один отправляет, а другой получает
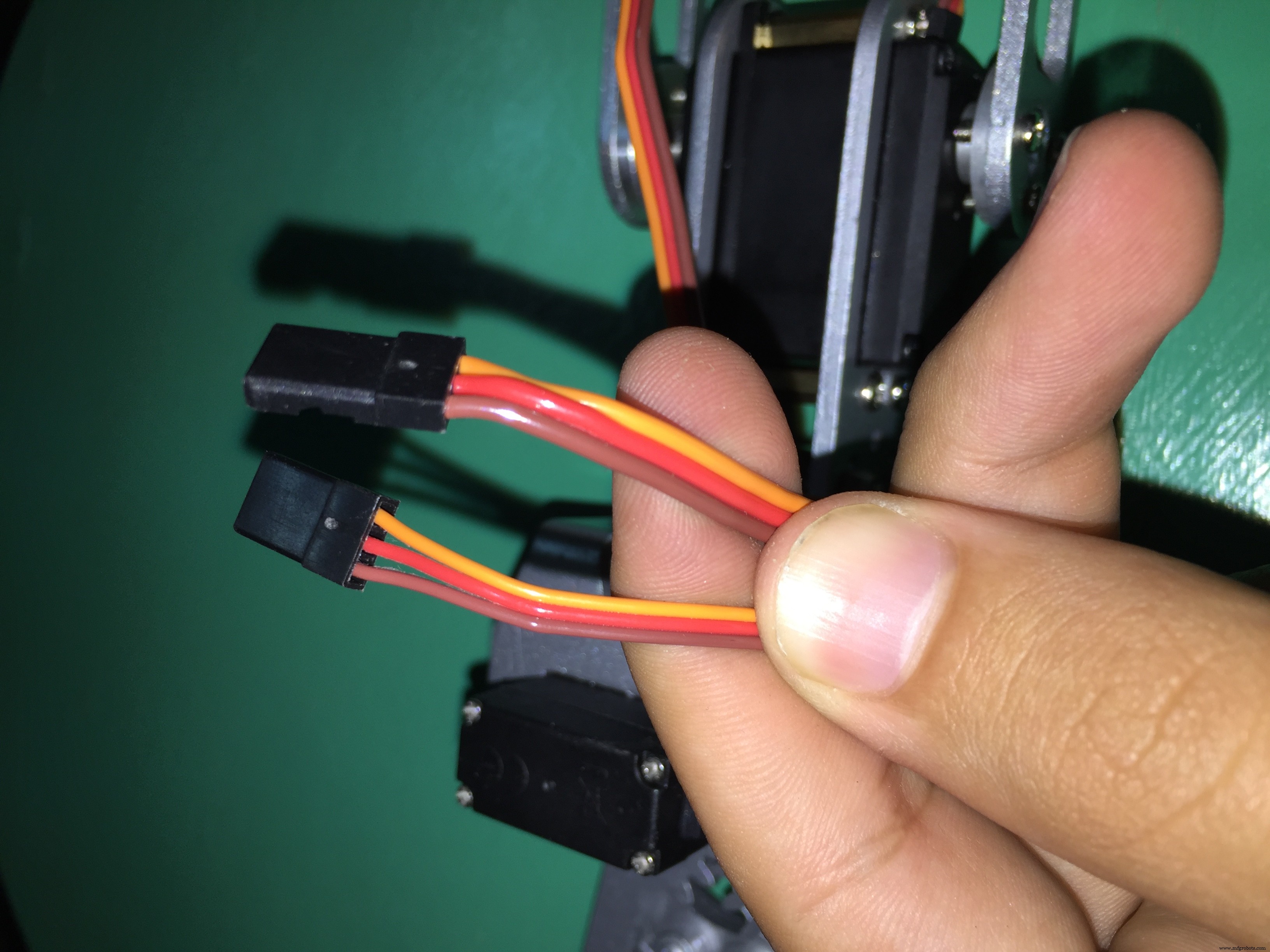
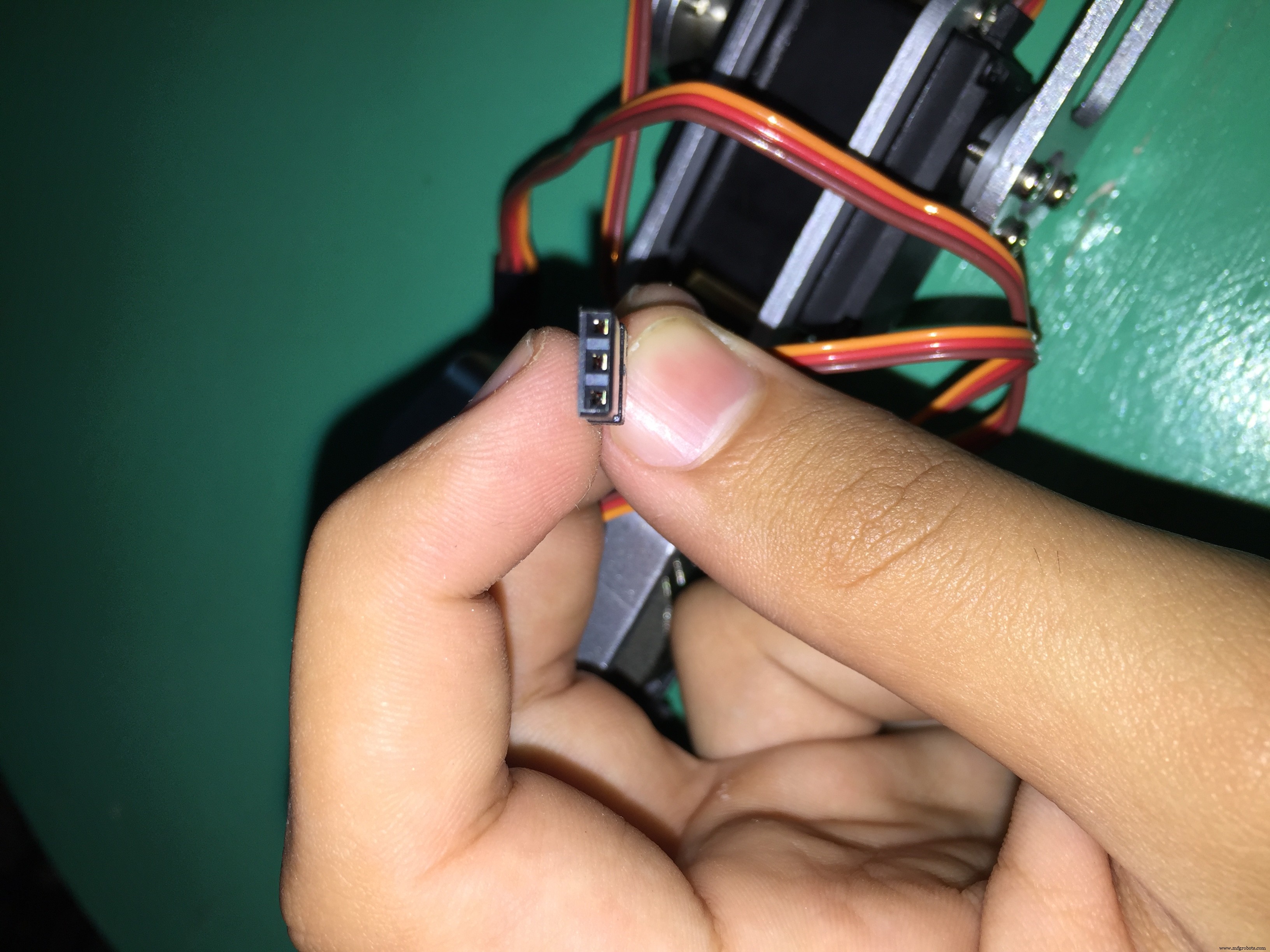
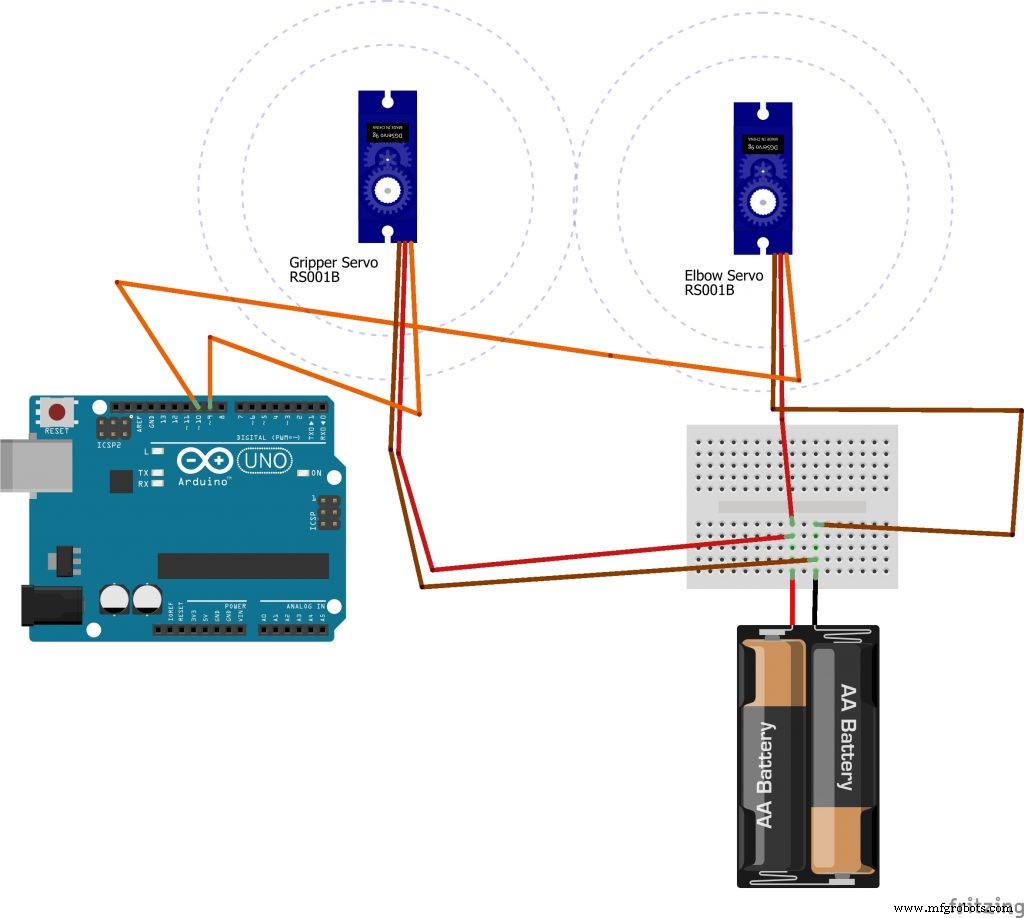
4) Серводвигатель имеет 3 провода:красный (положительный), коричневый (отрицательный), желтый или оранжевый (сигнал).
Примечание:ДЕЛАТЬ НЕ подключайте положительный и отрицательный серводвигатели к 5 В и заземлению платы Arduino. Плата Arduino будет развести огонь из-за большого тока, потребляемого двигателями; использовать the внешний аккумулятор.
- Красный провод к плюсу внешней батареи.
- Коричневый провод к минусу внешней батареи
- Оранжевый провод к любому цифровому контакту (PWN) на Arduino.
ПРИМЕЧАНИЕ. Не забудьте сделать GND батареи и GND Arduino общими, соединив каждый GND друг с другом.
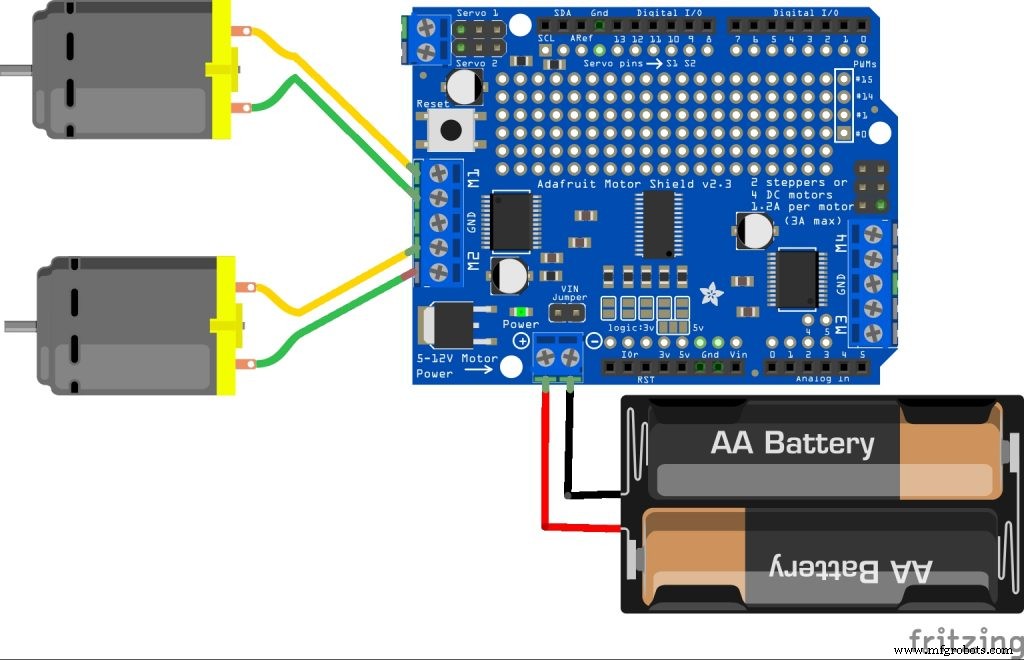
5) Двигатели постоянного тока
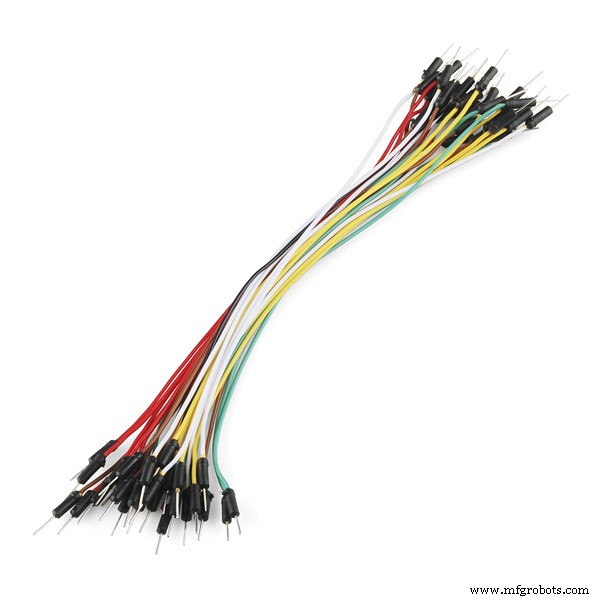
Вам нужно припаять некоторые провода к клеммам двигателя, чтобы можно было использовать эти двигатели.
Двигатель постоянного тока не имеет полярности. Нет положительного и отрицательного. Если вы поменяете местами подключения двигателя, направление движения двигателя изменится.

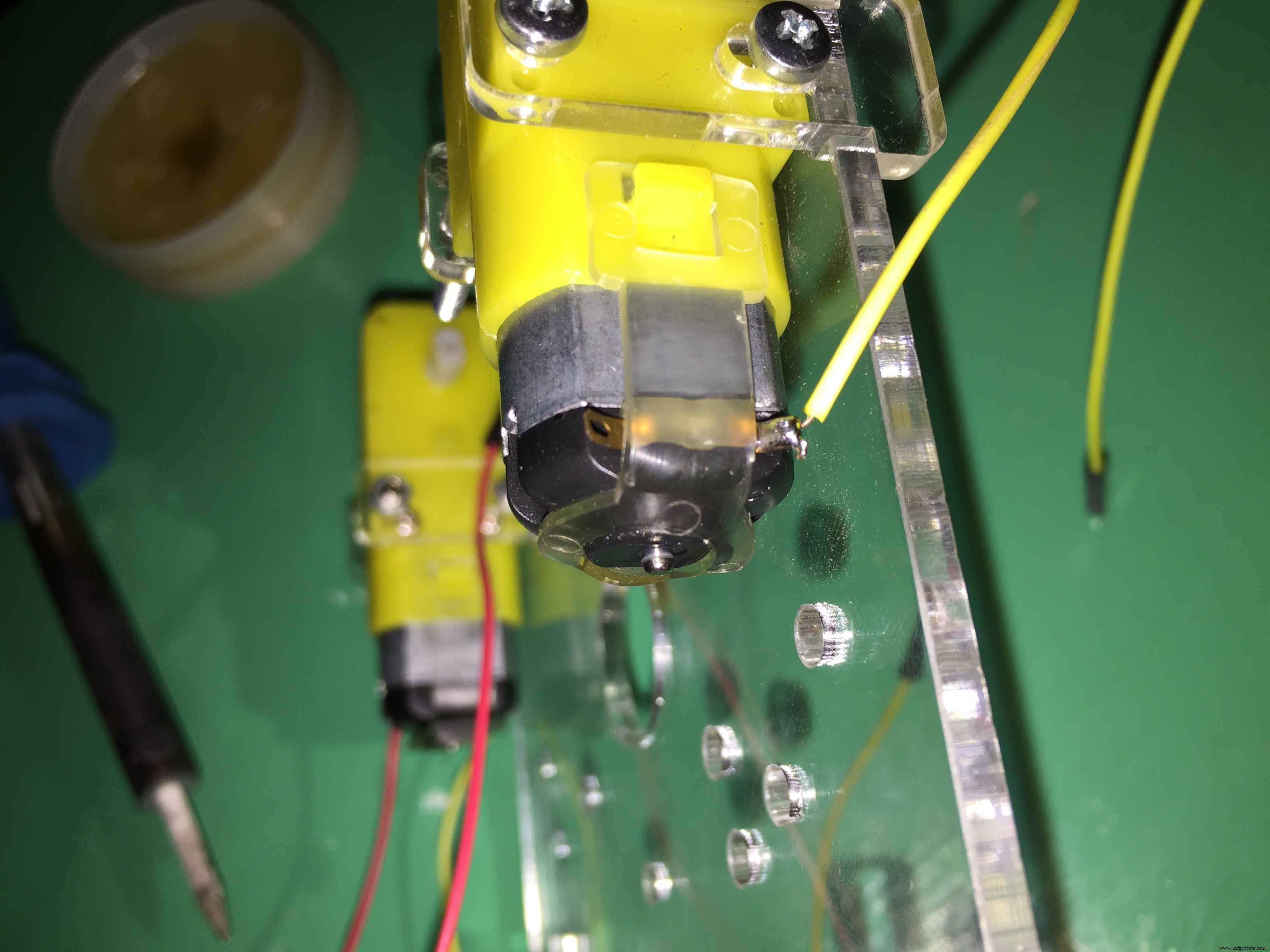
После того, как вы припаяете клеммы двигателя, подключите эти клеммы к экрану двигателя.

ПРИМЕЧАНИЕ. t код Arduino, I бывшие в употреблении Мотор 1 и Мотор 2 - кроме Мотор 3 и Мотор 4.
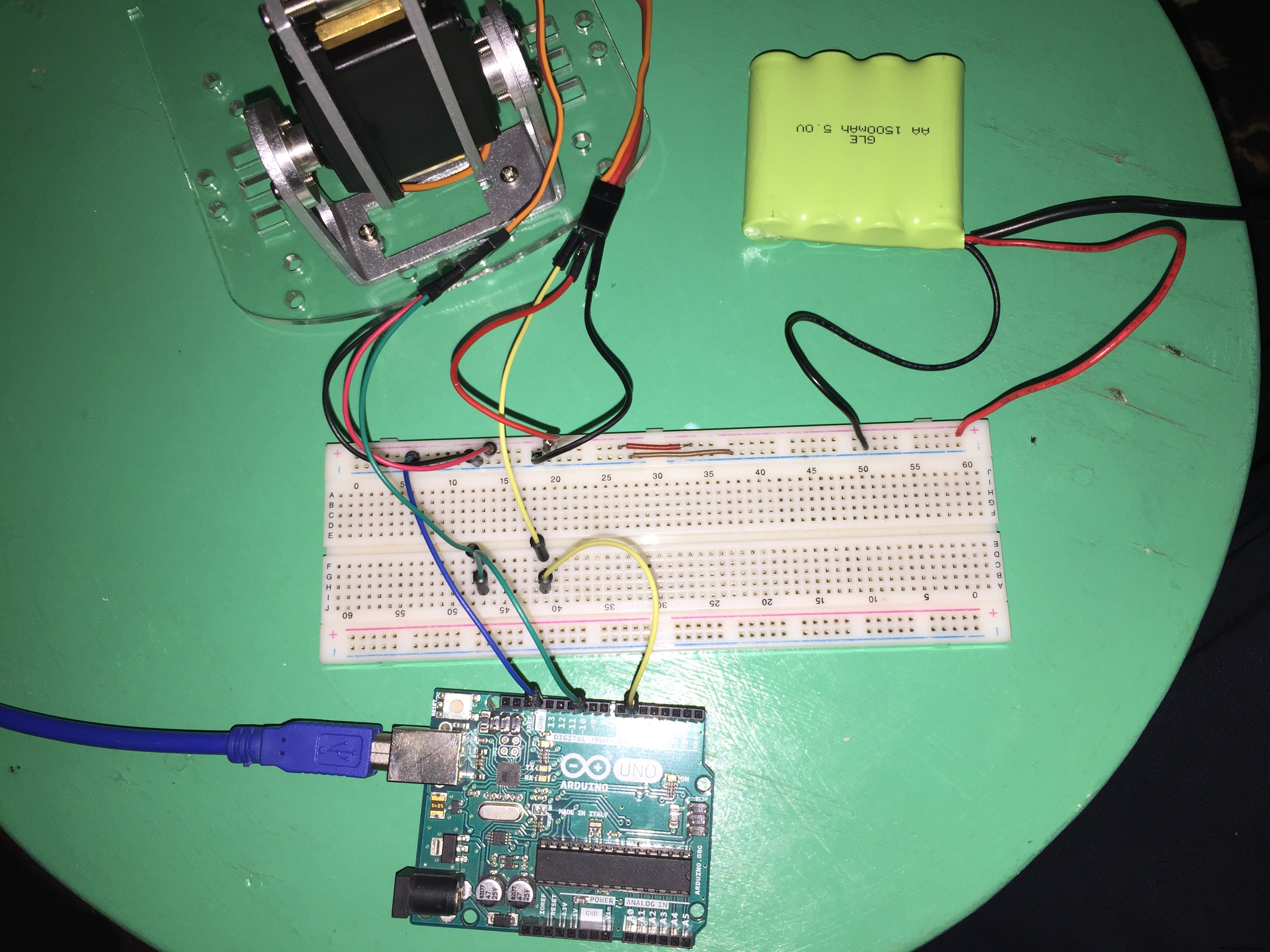
Схема
Как соединить моторы робота и аккумулятор с драйвером мотора.
Как соединить сервомоторы Arm и аккумулятор с платой Arduino.
Как подключить модуль bluetooth к плате Arduino.
ПРИМЕЧАНИЕ:отключите (удалите контакт RED WIRE +5) модуль bluetooth во время загрузки кода на плату Arduino. Затем подключите его снова после завершения процесса загрузки.
Код
- Код Arduino для робота Pick And Place
Код Arduino для робота Pick And Place Arduino
#include#include AF_DCMotor motorR (1); AF_DCMotor motorL (2); Servo elbowServo; Servo gripperServo; int command; void setup () {gripperServo.attach (9); elbowServo.attach (10); Serial.begin (9600); motorR.setSpeed (255); motorL.setSpeed (255);} void loop () {command =Serial.read (); / * Код ARM * / if (command> =1 &&command <=180) // сервопривод локтя перемещается в соответствии с положением большого пальца в приложении моба от 0 до 180. {ElbowServo.write (command);} else if ( command ==205) // Захват перемещается под углом 0 {gripperServo.write (0);} else if (command ==206) // Захват перемещается на угол 90 {gripperServo.write (90); } else if (command ==207) // захват перемещается на угол 180 {gripperServo.write (180);} / * КОД МАШИНЫ * / else if (command ==200) {motorR.run (FORWARD); motorL.run (ВПЕРЕД);} иначе, если (команда ==201) {motorR.run (ВПЕРЕД); motorL.run (НАЗАД); } иначе, если (команда ==202) {motorR.run (ОТПУСТИТЬ); motorL.run (РЕЛИЗ); } иначе, если (команда ==203) {motorR.run (НАЗАД); motorL.run (ВПЕРЕД); } иначе, если (команда ==204) {motorR.run (НАЗАД); motorL.run (НАЗАД); } иначе, если (команда ==0) {motorR.run (ВЫПУСК); motorL.run (РЕЛИЗ); }}
Схема
Это приложение работает только на телефонах Android.Перед использованием этого приложения необходимо включить Bluetooth
прежде чем выбрать модуль Bluetooth в приложении, соедините свой мобильный телефон с модулем Bluetooth в настройках телефона ieee_aast_aswan_test1_xVVlPTtt8n.apk
Производственный процесс
- Робот Raspberry Pi, управляемый через Bluetooth
- Создайте своего робота для видеостриминга, управляемого через Интернет, с помощью Arduino и Raspberry Pi
- Робот, управляемый Wi-Fi и использующий Raspberry Pi
- 3D-печать специальных захватов топливных форсунок для робота Pick and Place
- Производители роботов для выбора и размещения в Индии
- 10 лучших поставщиков роботов для выбора и размещения
- Как работают роботы для захвата и размещения
- Выберите и поместите — прекрасный пример использования робота с EasyWork
- Производство роботов и аккумуляторов:положительная связь
- Инструменты на конце манипулятора:применение роботов для захвата и размещения