


Управление шаговым двигателем 28BYJ-48 с помощью джойстика
Компоненты и расходные материалы
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Об этом проекте
Требуемое оборудование:
- Плата Arduino UNO
- Шаговый двигатель 28BYJ-48 (с платой драйвера ULN2003A)
- Джойстик
- Источник питания 5 В
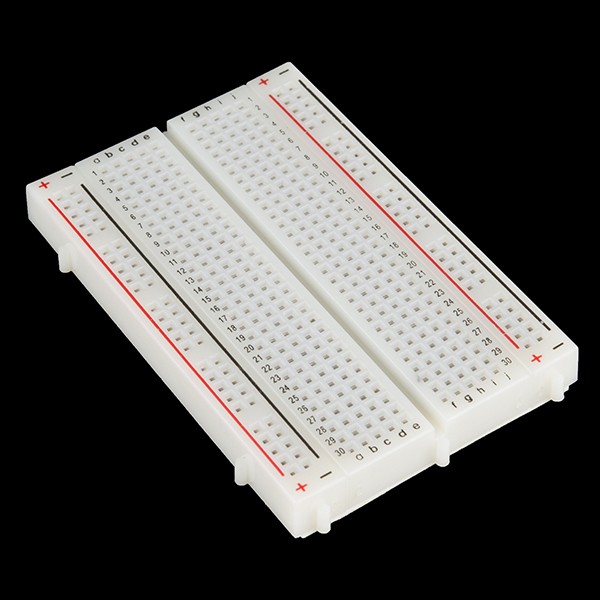
- Хлебная доска
- Перемычки
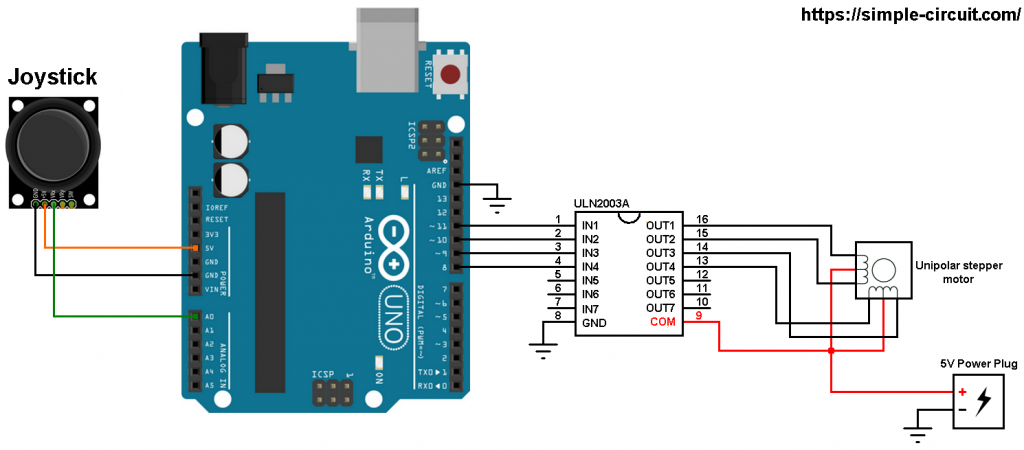
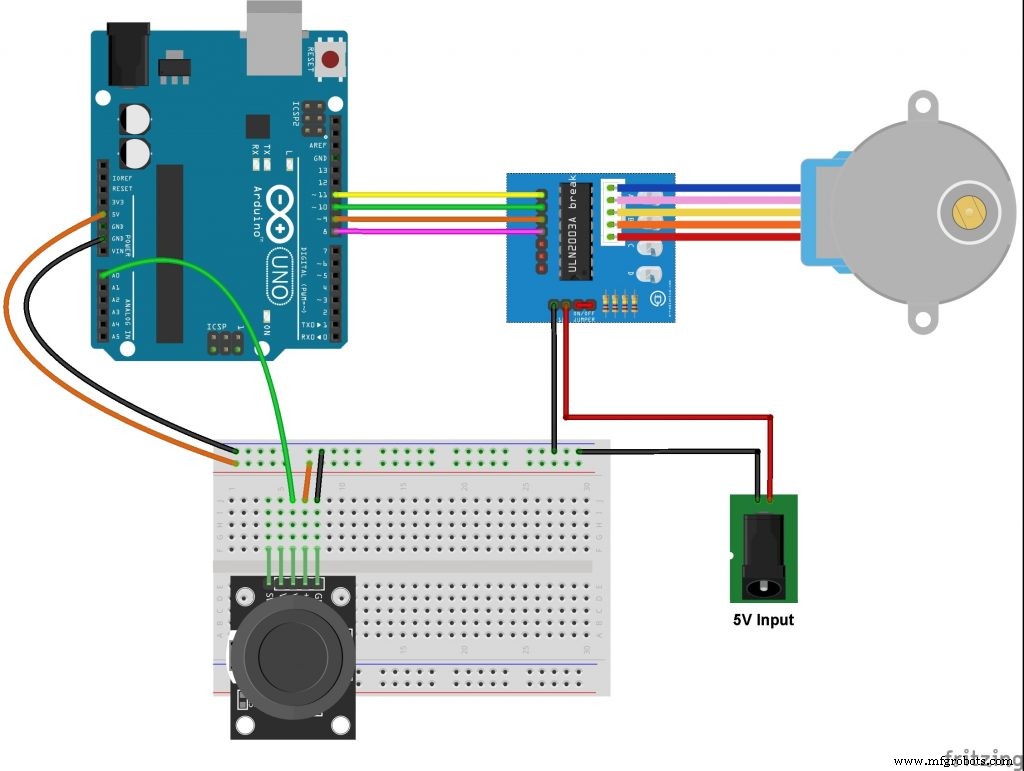
Управление шаговым двигателем с помощью Arduino и схемы джойстика:принципиальная схема проекта показана ниже (все заземленные клеммы соединены вместе).
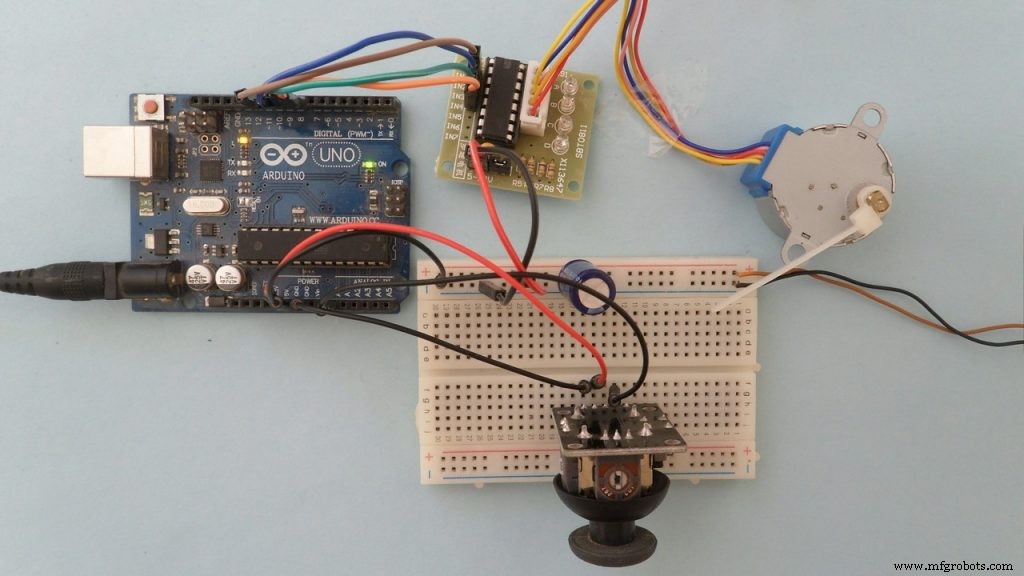
а на следующем изображении показан контур фритзинга:
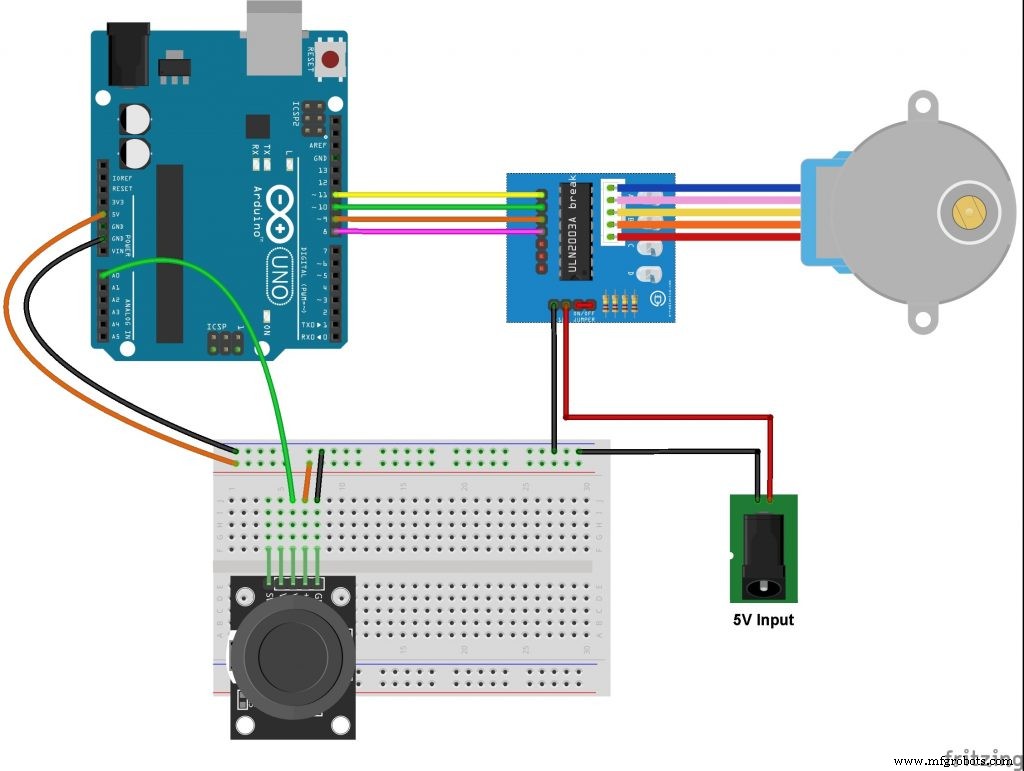
Шаговый двигатель подключен к плате ULN2003A, на которую подается внешний источник питания 5В. Линии управления (IN1, IN2, IN3 и IN4) этой платы подключаются к Arduino следующим образом:IN1 к контакту 11IN2 Arduino, контакту 10IN3 Arduino, контакту 9IN4 Arduino и контакту 8 Arduino
Плата джойстика имеет 5 контактов:GND, + 5V, VRX, VRY и SW, где:GND и + 5V - контакты источника питания; VRX - выход потенциометра оси X; VRY - выход потенциометра оси Y; SW - терминал кнопки (другой терминал). подключен к GND). Выход потенциометра оси X (VRX) подключен к аналоговому выводу Arduino A0, также можно использовать выход потенциометра оси Y (VRY). Штифт переключателя (SW) в этом примере не используется. С помощью потенциометров оси X и Y мы можем управлять двумя шаговыми двигателями независимо.
"Итак ребята если вы нравится проект, так что не забывайте следить и любить "
Код
- КОД:
КОД: C / C ++
пожалуйста, не забудьте добавить все библиотеки, которые включены в этот код// этот проект создан BEASTIDREES62 https://id.arduino.cc/?code=MTxqeHweG6vL2cur&state=amxEcTB2bnNiYjluTUxmRExWaWZnOXIzUk1BLWRGOD%2BLWRqD%DINBLWRqD%3NGDINDINX библиотека шагового двигателя # include// определение количества шагов на оборот # определение STEPS 32 // определение выводов управления шаговым двигателем # определение IN1 11 # определение IN2 10 # определение IN3 9 # определение IN4 8 // инициализация библиотеки шагового двигателя Stepper шаговый (ШАГИ, IN4, IN2, IN3, IN1); // выход потенциометра джойстика подключен к Arduino A0 # определить джойстик A0 void setup () {} void loop () {// прочитать аналоговое значение с потенциометра int val =analogRead (joystick); // если джойстик посередине ===> остановите двигатель if ((val> 500) &&(val <523)) {digitalWrite (IN1, LOW); digitalWrite (IN2, LOW); digitalWrite (IN3, LOW); digitalWrite (IN4, LOW); } else {// перемещаем двигатель в первом направлении while (val> =523) {// отображаем скорость между 5 и 500 об / мин int speed_ =map (val, 523, 1023, 5, 500); // установить скорость двигателя stepper.setSpeed (speed_); // перемещаем мотор (1 шаг) stepper.step (1); val =analogRead (джойстик); } // перемещаем двигатель в другом направлении while (val <=500) {// отображаем скорость между 5 и 500 об / мин int speed_ =map (val, 500, 0, 5, 500); // установить скорость двигателя stepper.setSpeed (speed_); // перемещаем мотор (1 шаг) stepper.step (-1); val =analogRead (джойстик); }}}
Схема
Производственный процесс
- Цепи управления двигателем
- Шаговые двигатели
- Сглаживание характеристик трансмиссии электромобиля с помощью полевого алгоритма управления
- Контроль доступа с помощью QR, RFID и проверки температуры
- Автономная турель Nerf Sentry
- Управление монетоприемником с помощью Arduino
- Библиотека биполярных шаговых двигателей
- Робот с сервомотором избегает препятствий
- Swiper - Auto Tinder / Bumble Swiper
- Токарный станок с ЧПУ