


Шаговые двигатели
Шаговый двигатель против серводвигателя
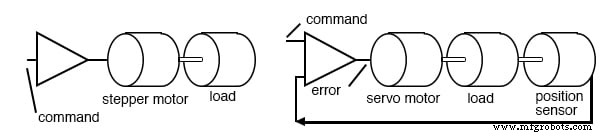
шаговый двигатель представляет собой «цифровую» версию электродвигателя. Ротор движется дискретными шагами по команде, а не вращается непрерывно, как в обычном двигателе. При остановке, но включении питания шаговый двигатель (сокращенно от шагового двигателя) удерживает нагрузку стабильно с помощью удерживающего момента .
Широкое распространение шагового двигателя за последние два десятилетия было вызвано появлением цифровой электроники. Современная электроника на твердотельных драйверах была ключом к ее успеху. Кроме того, микропроцессоры легко взаимодействуют со схемами драйверов шаговых двигателей.
С точки зрения применения предшественником шагового двигателя был серводвигатель. Сегодня это более дорогое решение для высокопроизводительных приложений управления движением. Стоимость и сложность серводвигателя обусловлены дополнительными компонентами системы:датчиком положения и усилителем ошибки). Это все еще способ позиционировать тяжелые грузы, недоступные для шаговых двигателей с меньшей мощностью.
Для высокого ускорения или необычайно высокой точности по-прежнему требуется серводвигатель. В противном случае по умолчанию используется шаговый двигатель из-за простой электроники привода, хорошей точности, хорошего крутящего момента, умеренной скорости и низкой стоимости.
Шаговый двигатель и серводвигатель
Шаговый двигатель позиционирует головки чтения-записи в дисководе гибких дисков. Когда-то они использовались для той же цели в жестких дисках. Однако высокая скорость и точность, необходимые для позиционирования головки современного жесткого диска, требуют использования линейного серводвигателя (звуковой катушки).
Сервоусилитель - это линейный усилитель с некоторыми сложными для интеграции дискретными компонентами. Чтобы оптимизировать коэффициент усиления сервоусилителя в зависимости от фазовой характеристики механических компонентов, требуются значительные конструкторские усилия. Драйверы шагового двигателя представляют собой менее сложные твердотельные переключатели, которые могут быть либо «включены», либо «выключены». Таким образом, контроллер шагового двигателя менее сложен и дорог, чем контроллер серводвигателя.
Замедленная синхронизация синхронные двигатели могут работать от сети переменного тока, как однофазные асинхронные двигатели с постоянными конденсаторами. Конденсатор создает угол 90 ° . второй этап. При постоянном сетевом напряжении у нас есть двухфазный привод.
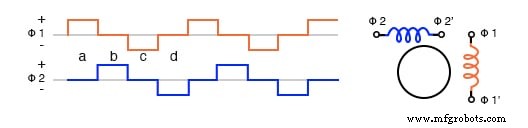
Управляйте волновыми формами биполярного (±) прямоугольные волны 2-24 В более распространены в наши дни. Биполярные магнитные поля также могут создаваться униполярными напряжения (одной полярности), приложенные к чередующимся концам обмотки с центральным отводом (рисунок ниже).
Другими словами, на двигатель можно переключить постоянный ток, чтобы он видел переменный ток. Поскольку обмотки последовательно запитываются, ротор синхронизируется с соответствующим магнитным полем статора. Таким образом, мы рассматриваем шаговые двигатели как класс синхронных двигателей переменного тока.
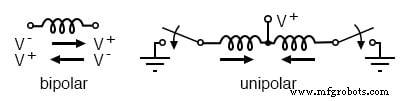
Униполярный привод катушки с центральным отводом в точке (b), имитирует переменный ток в одиночной катушке в точке (a)
Характеристики
Шаговые двигатели прочны и недороги, поскольку в роторе нет контактных колец обмотки или коммутатора. Ротор представляет собой твердое тело цилиндрической формы, которое также может иметь выступающие полюса или мелкие зубья. Чаще всего ротор представляет собой постоянный магнит.
Определить, что ротор является постоянным магнитом, можно, вращая рукой без питания, показывая фиксирующий момент . , пульсации крутящего момента. Катушки шагового двигателя намотаны внутри многослойного статора, за исключением штабеля строительство. Фаз намотки может быть от двух до пяти.
Эти фазы часто делятся на пары. Таким образом, 4-полюсный шаговый двигатель может иметь две фазы, состоящие из линейных пар полюсов, разнесенных на 90 ° . отдельно. Также может быть несколько пар полюсов на фазу. Например, 12-полюсный шаговый двигатель имеет 6 пар полюсов, по три пары на фазу.
Поскольку шаговые двигатели не обязательно вращаются непрерывно, номинальная мощность в лошадиных силах отсутствует. Если они действительно вращаются непрерывно, они даже не приблизятся к номинальной мощности в лошадиных силах. Это действительно небольшие устройства с низким энергопотреблением по сравнению с другими двигателями.
Они имеют номинальный крутящий момент до тысячи дюйм-унций (дюймов-унций) или десяти Н-м (ньютон-метров) для блока размером 4 кг. Шаговый двигатель маленького размера «копейки» имеет крутящий момент в одну сотую ньютон-метра или несколько дюймов-унций. Большинство шаговых двигателей имеют диаметр в несколько дюймов с крутящим моментом в доли нм или несколько дюймов на дюйм.
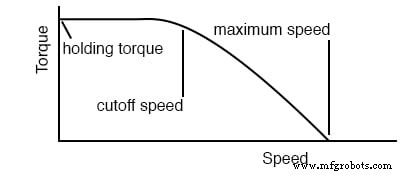
Доступный крутящий момент является функцией скорости двигателя, инерции нагрузки, момента нагрузки и приводной электроники, как показано на кривой зависимости скорости от крутящего момента . ниже. Удерживающий шаговый двигатель под напряжением имеет относительно высокий удерживающий момент . рейтинг. Для работающего двигателя доступен меньший крутящий момент, который снижается до нуля на некоторой высокой скорости.
Эта скорость часто недостижима из-за механического резонанса сочетания нагрузок двигателя.
Характеристики скорости шагового двигателя
Шаговые двигатели перемещаются по одному шагу за раз, угол шага при изменении формы волны возбуждения. Угол шага связан с деталями конструкции двигателя:числом витков, числом полюсов, числом зубцов. Это может быть от 90 ° до 0,75 ° , что соответствует от 4 до 500 шагов на оборот.
Электроника привода может уменьшить угол шага вдвое, перемещая ротор на полушага . .
Шаговые двигатели не могут мгновенно достичь скорости на кривой скорость-крутящий момент. максимальная начальная частота это максимальная скорость, с которой может быть запущен остановленный и разгруженный шаговый двигатель. Любая нагрузка сделает этот параметр недостижимым.
На практике частота шагов увеличивается во время пуска со значений значительно ниже максимальной пусковой частоты. При остановке шагового двигателя скорость шага может быть уменьшена перед остановкой.
Максимальный крутящий момент, при котором шаговый двигатель может запускаться и останавливаться, - это момент втягивания . . Эта крутящая нагрузка на шаговый двигатель возникает из-за фрикционной (тормозной) и инерционной (маховик) нагрузок на вал двигателя. Когда двигатель набирает обороты, момент отрыва это максимально устойчивый крутящий момент без потери ступеней.
Существует три типа шаговых двигателей в порядке возрастания сложности:с переменным магнитным сопротивлением, с постоянным магнитом и гибридные. Шаговый двигатель с регулируемым сопротивлением имеет прочный ротор из мягкой стали с выступающими полюсами. Шаговый двигатель с постоянными магнитами имеет цилиндрический ротор с постоянными магнитами.
Гибридный шаговый двигатель имеет зубцы из мягкой стали, добавленные к ротору с постоянным магнитом для уменьшения угла шага.
Шаговый двигатель с переменным сопротивлением
шаговый двигатель с переменным сопротивлением полагается на магнитный поток, ищущий путь с наименьшим сопротивлением через магнитную цепь. Это означает, что магнитомягкий ротор неправильной формы будет двигаться, замыкая магнитную цепь, что сводит к минимуму длину любого воздушного зазора с высоким сопротивлением.
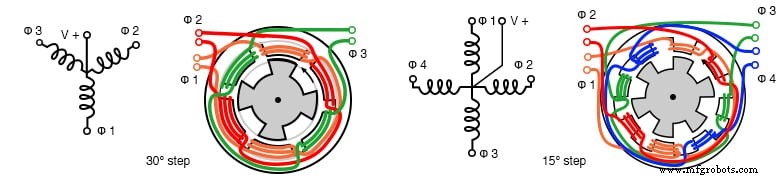
Статор обычно имеет три обмотки, распределенные между парами полюсов, ротор - четыре выступающих полюса, что дает 30 ° угол шага. Обесточенный шаговый двигатель без фиксирующего момента при вращении рукой идентифицируется как шаговый двигатель с переменным сопротивлением.
Трехфазные и четырехфазные шаговые двигатели с переменным сопротивлением
Формы сигналов возбуждения для шагового двигателя 3 φ можно увидеть в разделе «Реактивный двигатель». Привод для шагового двигателя 4 φ показан на рисунке ниже. Последовательное переключение фаз статора создает вращающееся магнитное поле, за которым следует ротор.
Однако из-за меньшего количества полюсов ротора на каждом шаге ротор перемещается меньше, чем угол статора. Для шагового двигателя с переменным сопротивлением шаговый угол определяется как:
ΘS =360o / NS ΘR =360o / NR ΘST =ΘR - ΘS где:ΘS =угол статора, ΘR =угол ротора, ΘST =угол шага NS =количество полюсов статора, NP =количество полюсов ротора
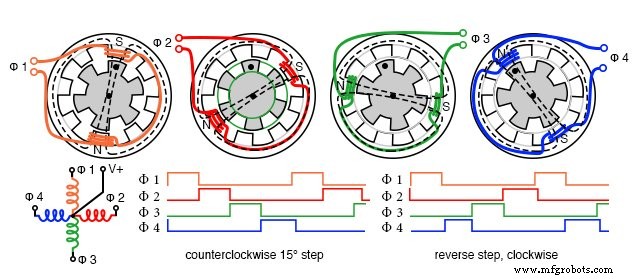
Последовательность шагов для шагового двигателя с переменным сопротивлением
На рисунке выше при движении от φ1 к φ2 и т. Д. Магнитное поле статора вращается по часовой стрелке. Ротор движется против часовой стрелки (CCW). Обратите внимание, чего не происходит! Точечный зуб ротора не перемещается на следующий зуб статора. Вместо этого поле статора φ2 притягивает другой зуб при перемещении ротора против часовой стрелки, который представляет собой меньший угол (15 ° ), чем угол статора 30 ° .
Угол зуба ротора 45 ° входит в расчет по приведенному выше уравнению. Ротор перемещается против часовой стрелки к следующему зубцу ротора под углом 45 ° . , но выравнивается по часовой стрелке на 30 ° зуб статора. Таким образом, фактический угол шага - это разница между углом статора в 45 ° . и угол ротора 30 °.
Насколько далеко повернулся бы шаговый двигатель, если бы ротор и статор имели одинаковое количество зубцов? Ноль - без обозначений.
Начиная в состоянии покоя с включенной фазой φ1, требуются три импульса (φ2, φ3, φ4), чтобы выровнять «пунктирный» зуб ротора со следующим зубцом статора против часовой стрелки, который составляет 45 ° . С 3 импульсами на зуб статора и 8 зубцами статора, 24 импульса или шагов перемещают ротор на 360 ° .
При изменении последовательности импульсов направление вращения меняется на противоположное вверху справа. Направление, частота шагов и количество шагов регулируются контроллером шагового двигателя, питающим драйвер или усилитель. Это можно было бы объединить в одну печатную плату.
Контроллер может быть микропроцессором или специализированной интегральной схемой. Драйвер представляет собой не линейный усилитель, а простой двухпозиционный выключатель, способный вырабатывать достаточно большой ток, чтобы активировать шаговый двигатель. В принципе, драйвером может быть реле или даже тумблер для каждой фазы. На практике драйвером служат либо дискретные транзисторные переключатели, либо интегральная схема.
И драйвер, и контроллер могут быть объединены в единую интегральную схему, принимающую прямую команду и шаговый импульс. Он последовательно выводит ток на соответствующие фазы.
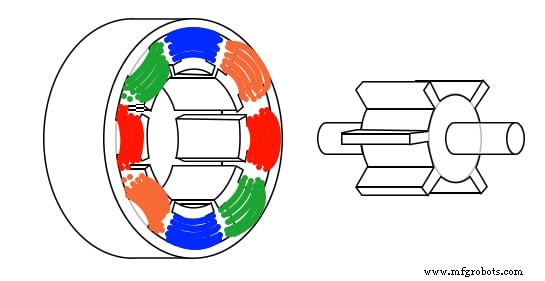
Шаговый двигатель с переменным сопротивлением
Вы можете разобрать шаговый резистор, чтобы увидеть внутренние компоненты. Внутренняя конструкция шагового двигателя с регулируемым сопротивлением показана на рисунке выше. У ротора выступающие полюса, так что они могут притягиваться к вращающемуся полю статора при его переключении. Настоящий двигатель намного длиннее, чем наша упрощенная иллюстрация.
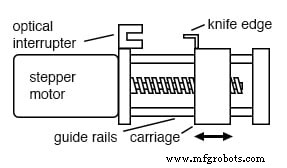
Ходовой винт шагового привода с переменным сопротивлением
Вал часто снабжен приводным винтом (рисунок выше). Это может привести к смещению головок дисковода гибких дисков по команде контроллера дисковода.
Шаговые двигатели с регулируемым сопротивлением применяются, когда требуется только средний уровень крутящего момента и достаточен большой угол шага. Винтовой привод, используемый в дисководе гибких дисков, является таким приложением. Когда контроллер включается, он не знает положение каретки.
Однако он может двигать каретку к оптическому прерывателю, калибруя положение, в котором острие режущего края прерывает прерыватель, как «исходное». Контроллер отсчитывает пошаговые импульсы от этой позиции. Пока крутящий момент нагрузки не превышает крутящий момент двигателя, контроллер будет знать положение каретки.
Резюме:шаговый двигатель с переменным сопротивлением
- Ротор представляет собой цилиндр из мягкого железа с выступающими (выступающими) полюсами.
- Это наименее сложный и самый недорогой шаговый двигатель.
- Единственный тип шагового двигателя без фиксирующего момента при ручном вращении обесточенного вала двигателя.
- Большой угол ступени
- Ходовой винт часто устанавливается на вал для линейного шагового движения.
Шаговый двигатель с постоянным магнитом
шаговый двигатель с постоянными магнитами имеет цилиндрический ротор с постоянными магнитами. Статор обычно имеет две обмотки. Обмотки могут быть отведены по центру, чтобы обеспечить униполярный Схема драйвера, в которой полярность магнитного поля изменяется путем переключения напряжения с одного конца обмотки на другой.
биполярный Для питания обмоток без центрального отвода требуется привод переменной полярности. Чистый шаговый двигатель с постоянным магнитом обычно имеет большой угол шага. Вращение вала обесточенного двигателя показывает фиксирующий момент. Если угол фиксации большой, скажем, 7,5 ° . до 90 ° , скорее всего, это шаговый двигатель с постоянным магнитом, а не гибридный шаговый двигатель.
Для шаговых двигателей с постоянными магнитами требуются фазированные переменные токи, подаваемые на две (или более) обмотки. На практике это почти всегда прямоугольные волны, генерируемые твердотельной электроникой от постоянного тока.
биполярный возбуждение представляет собой прямоугольные волны, чередующиеся между (+) и (-) полярностями, например, от +2,5 В до -2,5 В. Униполярный Привод подает (+) и (-) переменный магнитный поток на катушки, создаваемый парой положительных прямоугольных волн, приложенных к противоположным концам катушки с центральным отводом. Синхронизация биполярной или униполярной волны определяется волновым движением, полным шагом или полушагом.
Волновой привод
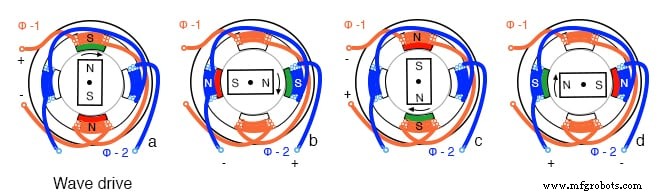
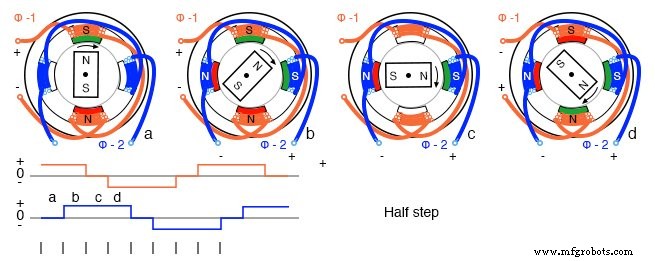
Последовательность возбуждения PM волны (a) φ1 +, (b) φ2 +, (c) φ1-, (d) φ2-
По идее, самый простой привод - это волновой привод . . Последовательность вращения слева направо:положительная φ-1 направляет северный полюс ротора вверх, (+) φ-2 направляет ротор на север вправо, отрицательная φ-1 притягивает ротор на север вниз, (-) φ-2 направляет ротор влево. Приведенные ниже формы волны возбуждения показывают, что только одна катушка находится под напряжением одновременно. Несмотря на простоту, это не дает такого большого крутящего момента, как другие методы привода.
Формы сигналов:биполярный волновой двигатель
Формы сигналов (рисунок выше) биполярны, потому что обе полярности, (+) и (-), управляют шаговым двигателем. Магнитное поле катушки меняется на противоположное, потому что меняется полярность управляющего тока.
Формы сигналов:однополярный волновой привод
Формы сигналов (рисунок выше) являются униполярными, поскольку требуется только одна полярность. Это упрощает электронику привода, но требует вдвое больше драйверов. Форм сигналов вдвое больше, потому что пара (+) волн требуется для создания переменного магнитного поля путем приложения к противоположным концам катушки с центральным отводом.
Мотор требует переменных магнитных полей. Они могут быть вызваны как униполярными, так и биполярными волнами. Однако катушки двигателя должны иметь отводы по центру для униполярного привода.
Шаговые двигатели с постоянными магнитами производятся с различными конфигурациями выводов.
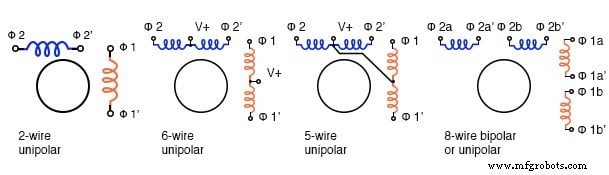
Электрические схемы шагового двигателя
- 4-проводный двигатель может работать только с биполярными сигналами.
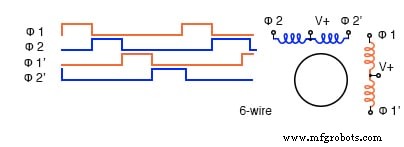
- Шестипроводный двигатель, наиболее распространенный вариант, предназначен для униполярного привода из-за центральных ответвлений. Тем не менее, это может быть вызвано биполярными волнами, если игнорировать центральные отводы.
- 5-проводный двигатель может приводиться в движение только однополярными волнами, поскольку общий центральный ответвитель создает помехи, если обе обмотки находятся под напряжением одновременно.
- 8-проводная конфигурация встречается редко, но обеспечивает максимальную гибкость. Он может быть подключен как для униполярного привода, так и для 6-проводного или 5-проводного двигателя. Пара катушек может быть подключена последовательно для высоковольтного биполярного слаботочного привода или параллельно для низковольтного сильноточного привода.
бифилярная обмотка производится путем параллельной намотки катушек двумя проводами, часто красного и зеленого эмалированного провода. Этот метод обеспечивает точное соотношение витков 1:1 для обмоток с центральным отводом. Этот метод намотки применим ко всем схемам, кроме четырехпроводной схемы, указанной выше.
Полный шаг
Полный шаг привод обеспечивает больший крутящий момент, чем волновой привод, потому что обе катушки находятся под напряжением одновременно. Это притягивает полюса ротора на полпути между двумя полюсами поля. (Рисунок ниже)
Полный шаг, биполярный привод
Полношаговый биполярный привод, как показано выше, имеет тот же угол шага, что и волновой привод. Для униполярного привода (не показан) потребуется пара униполярных сигналов для каждой из вышеуказанных биполярных сигналов, приложенных к концам обмотки с центральным отводом. В униполярном приводе используется менее сложная и менее дорогая схема драйвера. Дополнительная стоимость биполярного привода оправдана, когда требуется больший крутящий момент.
Полушаговый привод
Угол шага для данной геометрии шагового двигателя уменьшается вдвое с помощью полушага . водить машину. Это соответствует удвоенному количеству ступенчатых импульсов на оборот. (Рисунок ниже) Полушаговый режим обеспечивает большее разрешение при установке вала двигателя.
Например, при полушаге двигателя, перемещающего печатающую головку по бумаге струйного принтера, плотность точек удвоится.
Полушаг, биполярный привод
Полушаговый привод представляет собой комбинацию волнового привода и полного шага привода, при котором одна обмотка находится под напряжением, а затем обе обмотки под напряжением, что дает в два раза больше ступеней. Формы униполярных сигналов для полушагового привода показаны выше. Ротор совмещен с полюсами возбуждения как для волнового привода, так и между полюсами как для полного шагового привода.
Возможен микрошаг со специализированными контроллерами. Изменяя токи в обмотках синусоидально, многие микрошаги могут быть интерполированы между нормальными положениями. Конструкция шагового двигателя с постоянными магнитами значительно отличается от приведенных выше рисунков.
Желательно увеличить количество полюсов сверх указанного, чтобы получить меньший угол ступеньки. Также желательно уменьшить количество обмоток или, по крайней мере, не увеличивать количество обмоток для простоты изготовления.
Строительство
Конструкция шагового двигателя с постоянным магнитом значительно отличается от приведенных выше рисунков. Желательно увеличить количество полюсов сверх указанного, чтобы получить меньший угол ступеньки. Также желательно уменьшить количество обмоток или, по крайней мере, не увеличивать количество обмоток для простоты изготовления.
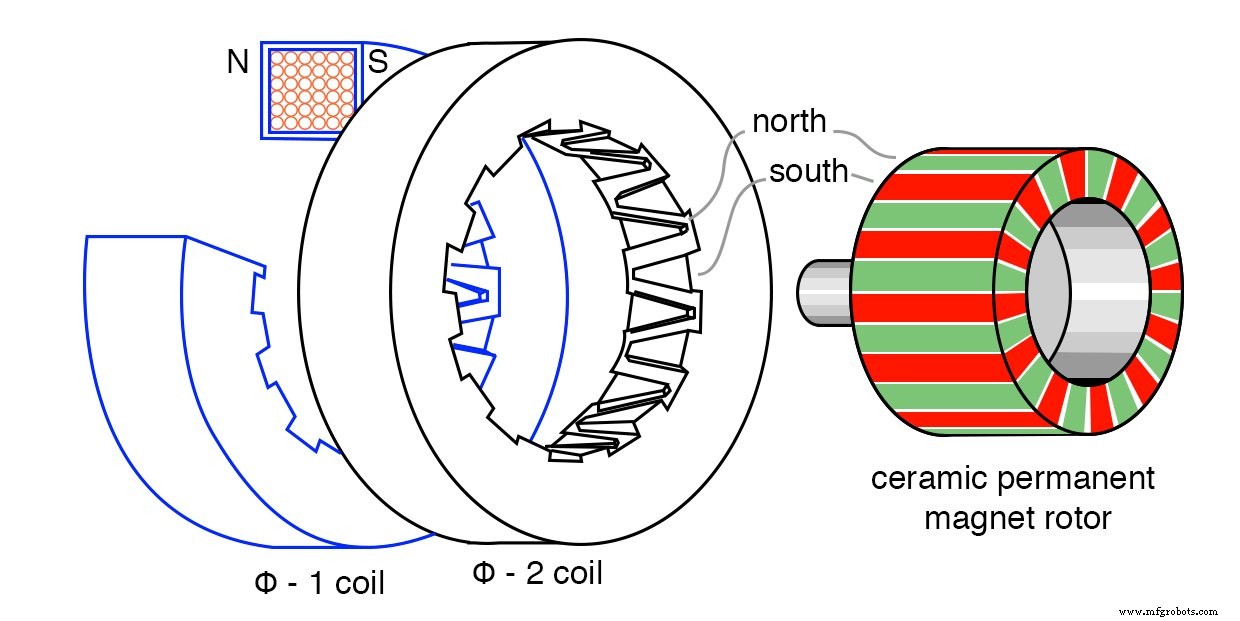
Шаговый двигатель с постоянными магнитами, конструкция с 24-полюсным стеклопакетом
Шаговый двигатель с постоянным магнитом имеет только две обмотки, но при этом имеет 24 полюса в каждой из двух фаз. Этот стиль построения известен как штабелирование . . Фазовая обмотка обернута оболочкой из мягкой стали с пальцами, подведенными к центру.
Одна фаза, на временной основе, будет иметь северную и южную стороны. Каждая сторона оборачивается к центру пончика двенадцатью встречно-гребенчатыми пальцами, всего 24 полюса. Эти чередующиеся пальцы север-юг будут притягивать ротор с постоянным магнитом.
Если полярность фазы поменять местами, ротор прыгнет на 360 ° / 24 =15 ° . Мы не знаем, какое направление, что бесполезно. Однако, если мы запитаем φ-1, а затем φ-2, ротор переместится на 7,5 ° потому что φ-2 смещен (повернут) на 7,5 ° от φ-1. См. Смещение ниже. И он будет вращаться в воспроизводимом направлении, если фазы чередуются.
Применение любой из вышеуказанных форм волны приведет к вращению ротора с постоянным магнитом.
Обратите внимание, что ротор представляет собой серый ферритно-керамический цилиндр, намагниченный по показанной 24-полюсной схеме. Это можно увидеть с помощью магнитной пленки или железных опилок, нанесенных на бумажную обертку. Однако цвета пленки будут зелеными как для северного, так и для южного полюсов.
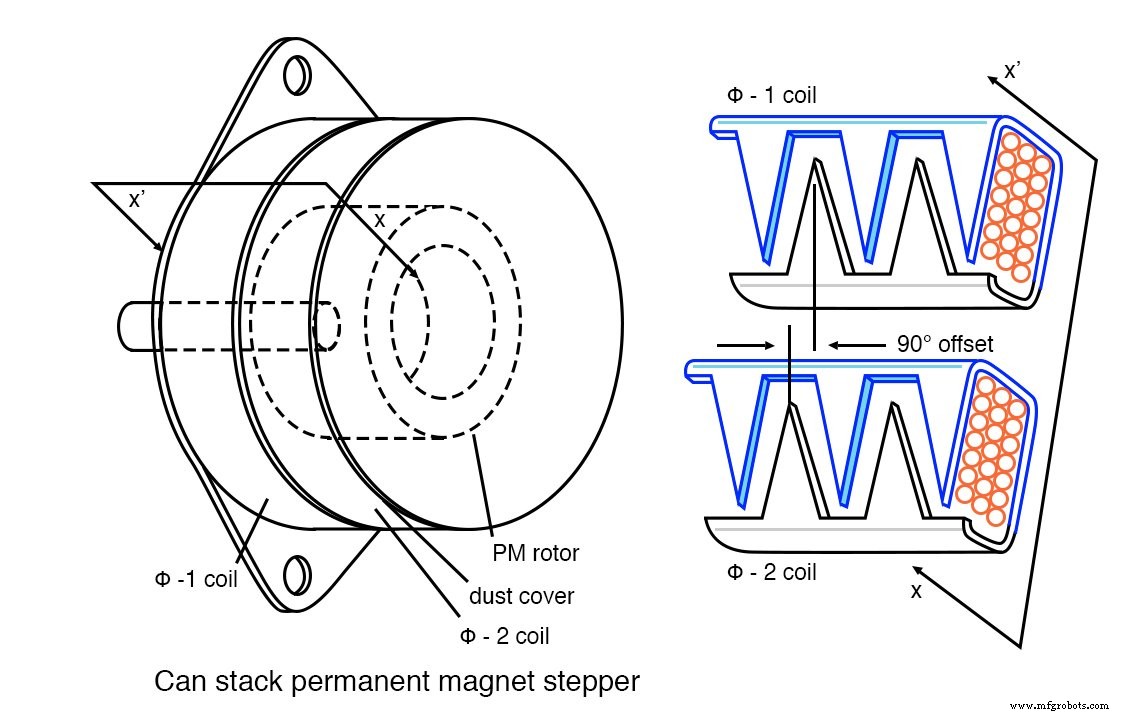
(a) Внешний вид стека банок, (b) детали смещения поля
Конструкция шагового двигателя PM в виде штабелированных банок отличительна, и ее легко идентифицировать по уложенным друг на друга «банкам» (рисунок выше). Обратите внимание на смещение вращения между двухфазными секциями. Это ключ к тому, чтобы ротор следил за переключением полей между двумя фазами.
Резюме:шаговый двигатель с постоянными магнитами
- Ротор представляет собой постоянный магнит, часто ферритовую втулку, намагниченную множеством полюсов.
- Конструкция штабеля банок обеспечивает множество полюсов из одной катушки с чередующимися пальцами из мягкого железа.
- Угол ступени от большого до среднего.
- Часто используется в компьютерных принтерах для продвижения бумаги.
Гибридный шаговый двигатель
гибридный шаговый двигатель сочетает в себе особенности шагового двигателя с переменным магнитным сопротивлением и шагового двигателя с постоянным магнитом для уменьшения угла шага. Ротор представляет собой цилиндрический постоянный магнит, намагниченный по оси радиальными зубьями из мягкого железа.
Катушки статора намотаны на чередующиеся полюсы с соответствующими зубьями. Обычно между парами полюсов распределяются две фазы обмотки. Эта обмотка может иметь центральное ответвление для униполярного привода. Центральный отвод достигается за счет бифилярной намотки . , пара проводов, физически намотанных параллельно, но соединенных последовательно.
Полюса север-юг поменяют полярность фаз, когда ток фазового привода меняется на противоположное. Биполярный привод необходим для обмоток без отвода.
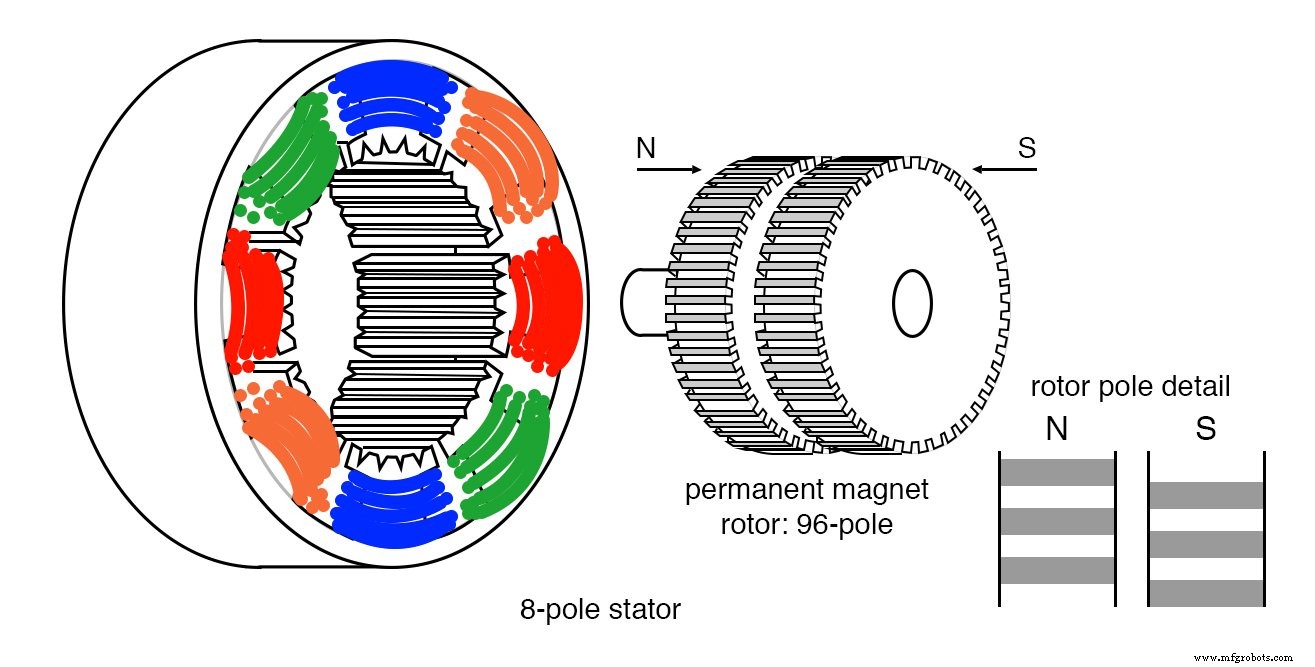
Гибридный шаговый двигатель
Обратите внимание, что 48 зубьев на одной секции ротора смещены на половину шага относительно другой. (См. Детали полюсов ротора выше. Это смещение зубьев ротора также показано ниже.) Из-за этого смещения ротор фактически имеет 96 чередующихся полюсов противоположной полярности.
Это смещение допускает вращение с шагом 1/96 оборота за счет изменения полярности поля одной фазы. Обычно используются двухфазные обмотки, как показано выше и ниже. Хотя фаз может быть до пяти.
Зубья статора на 8 полюсах соответствуют зубцам 48 ротора, за исключением отсутствующих зубцов в пространстве между полюсами. Таким образом, один полюс ротора, скажем южный полюс, может быть совмещен со статором в 48 различных положениях. Однако зубцы южного полюса смещены относительно северных зубцов на половину зуба.
Следовательно, ротор может быть совмещен со статором в 96 различных положениях. Это половинное смещение зуба показано на детали полюса ротора выше или на рисунке ниже.
Как будто это было недостаточно сложно, главные полюса статора разделены на две фазы (φ-1, φ-2). Эти фазы статора смещены друг от друга на четверть зуба. Эта деталь видна только на схематических диаграммах ниже. В результате ротор движется с шагом в четверть зуба при поочередном включении фаз.
Другими словами, ротор движется с шагом 2 × 96 =192 шага за оборот для вышеуказанного шагового двигателя.
На приведенном выше рисунке представлен реальный гибридный шаговый двигатель. Тем не менее, мы предоставляем упрощенное графическое и схематическое изображение, чтобы проиллюстрировать детали, не очевидные выше. Обратите внимание на уменьшенное количество катушек и зубьев в роторе и статоре для простоты.
На следующих двух рисунках мы пытаемся проиллюстрировать вращение на четверть зуба, вызванное двумя фазами статора, смещенными на четверть зуба, и смещением половины зуба ротора. Смещение статора на четверть зуба в сочетании с синхронизацией тока привода также определяет направление вращения.
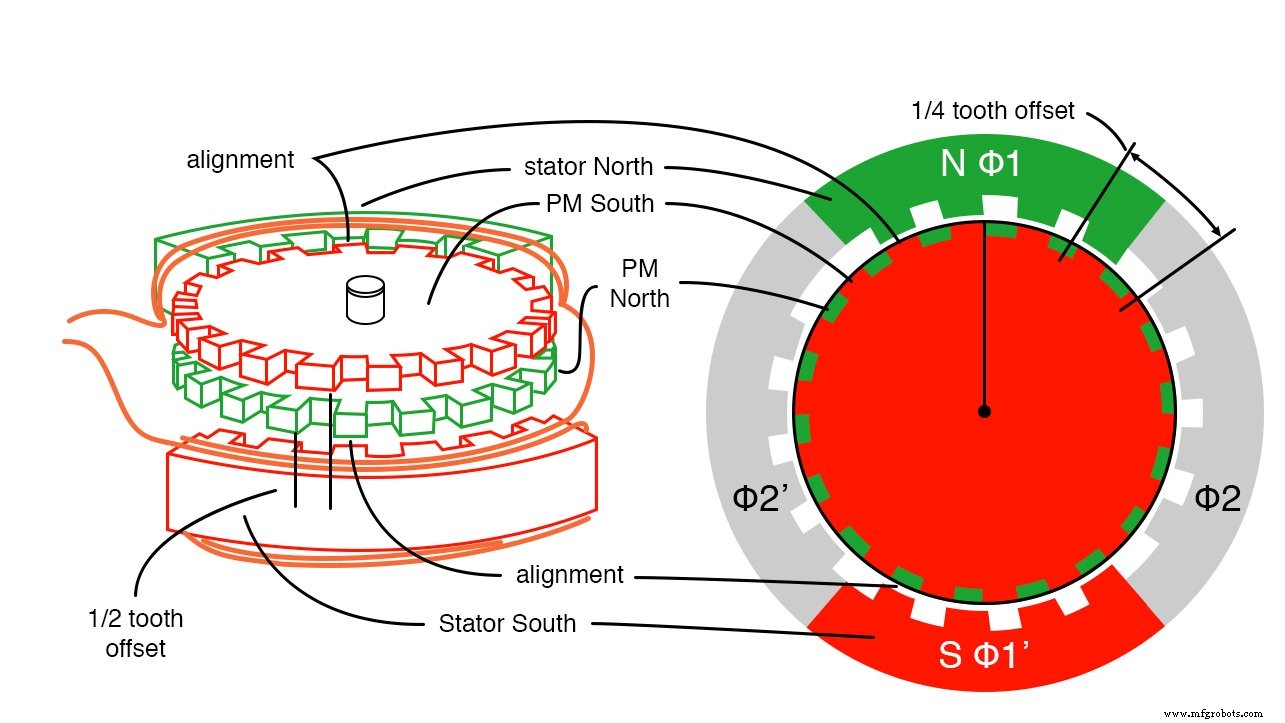
Принципиальная схема гибридного шагового двигателя
Особенности схемы гибридного шагового двигателя
- Верх ротора постоянного магнита - это южный полюс, нижний - северный.
- Зубья ротора с севера на юг смещены на половину зуба.
- Если статор φ-1 временно находится под напряжением, север вверху, юг внизу.
- Верхние зубцы статора φ-1 выровнены на север по отношению к верхним южным зубцам ротора.
- Нижние зубцы статора φ-1 ’выровнены на юг по отношению к нижним северным зубцам ротора.
- Крутящий момент, приложенный к валу, достаточный для преодоления удерживающего момента, приведет к перемещению ротора на один зуб.
- Если изменить полярность φ-1, ротор переместится на половину зубца, направление неизвестно. Выравнивание будет следующим:верхняя часть южного статора - нижняя часть северного ротора, нижняя часть северного статора - южный ротор.
- Зубья статора φ-2 не совмещены с зубьями ротора, когда φ-1 находится под напряжением. Фактически, зубцы статора φ-2 смещены на четверть зуба. Это обеспечит вращение на эту величину, если φ-1 обесточен, а φ-2 включен. Полярность φ-1 и привода определяют направление вращения.
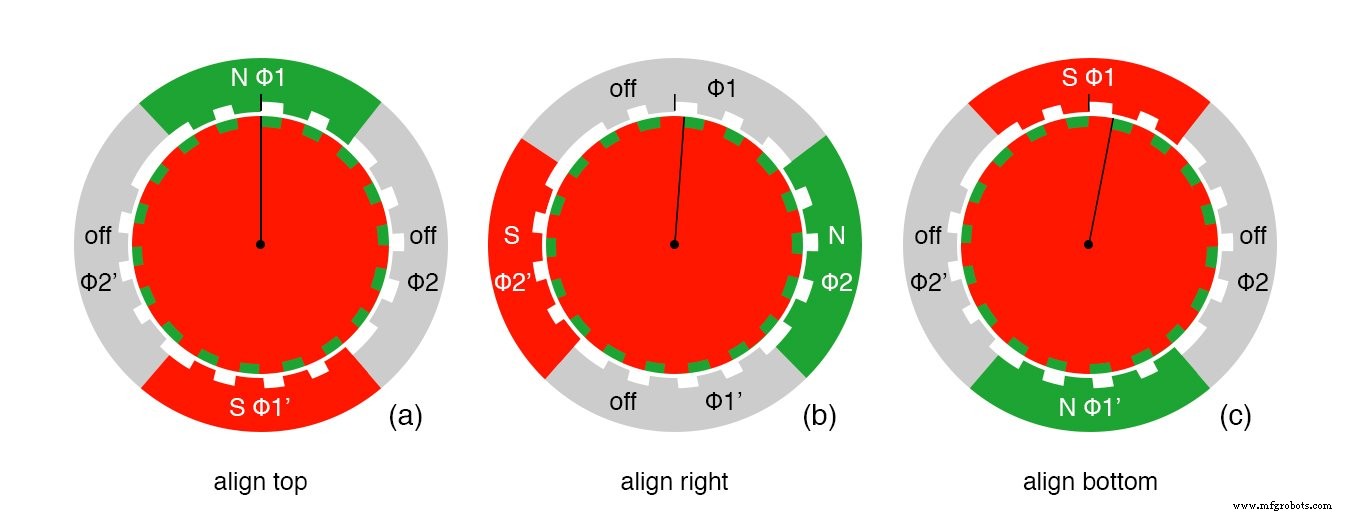
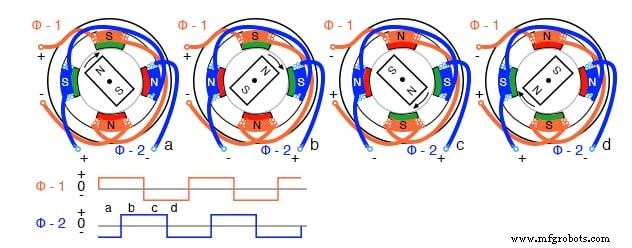
Последовательность вращения гибридного шагового двигателя
Вращение гибридного шагового двигателя
- Вверху ротора расположен постоянный магнит на юге, внизу - на севере. Поля φ1, φ-2 переключаемые:вкл., Выкл., Реверс.
- (а) φ-1 =вкл. =север, φ-2 =выкл. Выровнять (сверху вниз): φ-1 статор-N:верхний ротор-S, φ-1 ’статор-S:нижний ротор-N. Начальное положение, вращение =0.
- (б) φ-1 =выключено, φ-2 =включено. Выровнять (справа налево): φ-2 статор-N-справа:ротор-верх-S, φ-2 ’статор-S:ротор-низ-N. Повернуть на 1/4 зуба, полное вращение =1/4 зуба.
- (в) φ-1 =реверс (включен), φ-2 =выключен. Выровнять (снизу вверх): φ-1 статор-S:ротор-нижний-N, φ-1 ’статор-N:ротор-верх-S. Поверните на 1/4 зуба из последней позиции. Полный оборот с начала:1/2 зуба.
- Не показано:φ-1 =выключено, φ-2 =обратное (включено). Выровнять (слева направо): Полный оборот:3/4 зуба.
- Не показано:φ-1 =включено, φ-2 =выключено (то же, что и (a)). Выровнять (сверху вниз): Общее вращение на 1 зуб.
Шаговый двигатель без источника питания с фиксированным моментом представляет собой шаговый двигатель с постоянным магнитом или гибридный шаговый двигатель. Гибридный шаговый двигатель будет иметь небольшой угол шага, намного меньше, чем 7,5 ° . шаговых двигателей с постоянными магнитами. Угол шага может составлять доли градуса, что соответствует нескольким сотням шагов на оборот. Обзор:гибридный шаговый двигатель
- Угол шага меньше, чем у шаговых двигателей с переменным сопротивлением или с постоянными магнитами.
- Ротор представляет собой постоянный магнит с мелкими зубьями. Северный и южный зубцы смещены на половину зуба для меньшего угла шага.
- Полюса статора имеют одинаковые мелкие зубья того же шага, что и ротор.
- Обмотки статора разделены не менее чем на две фазы.
- Полюса одной обмотки статора смещены на четверть зуба для еще меньшего угла шага.
СВЯЗАННЫЙ РАБОЧИЙ ЛИСТ:
- Рабочий лист шаговых двигателей
Промышленные технологии
- Однофазные асинхронные двигатели
- Коллекторные двигатели переменного тока
- Nanotec:компактный контроллер двигателя для бесщеточных двигателей постоянного тока и шаговых двигателей
- Технический совет:двигатели
- Серая зона между серводвигателями и шаговыми двигателями
- Безопасность электродвигателя:различные фазы и меры безопасности
- 4 основных вида отказов обмотки в электродвигателях переменного тока
- О промышленных двигателях и приложениях
- Введение в двигатель BLDC
- Правильное обслуживание двигателей компрессоров