


DDTv3:3D-печатный боевой робот из нейлона и кевлара
DDTv3:3D-печатный боевой робот из нейлона и кевлара
У меня не было возможности написать отчет о событии Bot Blast 2015 в начале июля этого года, но если бы я это сделал, мне нечего было бы сказать. Ни ДДТ, ни Silent Spring не показали хороших результатов и составили 2-4 балла. Кроме того, рама ДДТ была сделана для этого, и я увидел возможность пересмотреть некоторые из дизайнерских верований, которые я пропагандировал в течение прошлого года, такие как «развлечение с большим оружием» и «непрямой драйв». Эти концепции хороши с точки зрения развлекательной ценности и долгосрочной надежности, но не обязательно являются ключом к победе в боях. С небольшим появлением на телевидении у меня была цель за моей спиной, и многие строители хотели бы иметь шанс проявить себя против одного из «лучших» строителей роботов, как описывают основатели Battlebots. Я не возражаю против этого, но если это так, мне лучше оправдать эту шумиху. Итак, начиная с ДДТ, я буду развивать каждого робота в моем парке.
Новый дизайн
Недавно Чарльз приобрел 3D-принтер Mark One у компании Mark Forged. Этот принтер уникален тем, что он может встраивать НЕПРЕРЫВНЫЕ нити волокна (стекловолокно, кевлар, углеродное волокно) в каждый слой своего отпечатка. Хотя он не может разместить волокно по вертикальной оси сборки, это колоссальное улучшение прочности на разрыв.
Кроме того, он печатает нейлон в качестве основного материала, который механически превосходит АБС в нашем приложении. Чтобы еще больше продемонстрировать возможности и применение их технологии, я решил напечатать ДДТ как цельный нейлон-кевлар.
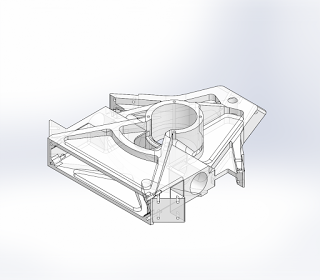
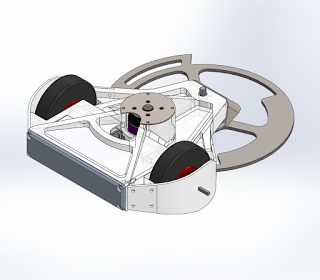
Спроектировать раму unibody немного сложно, потому что многие детали о деталях, их соединениях и порядке сборки должны быть известны заранее. САПР стал бесценным инструментом в этом процессе; каждая деталь была смоделирована с мучительными деталями, и был разработан подробный порядок сборки заднего отсека для компонентов.
Я полностью понимаю, что этот дизайн не оптимален для 3D-печати, и, возможно, я смогу объяснить в другом посте, если людям интересно. Основанием для конструкции ферм были надстройки для придания жесткости длинным или тонким элементам. Лучшая конструкция сделала бы робота более блочным, но, на мой взгляд, это было бы скучно с эстетической точки зрения.
ДДТ сохранил свою уникальную форму и торговую марку «огромный клинок», но с некоторыми модификациями. Во-первых, размер клинка был уменьшен до 6 дюймов (вместо 6,5 дюймов). Это решение было принято для того, чтобы освободить часть веса, которая будет размещена в другом месте, в частности, на ребрах лопастей. У меня было два лезвия для ДДТ v2, и оба они ужасно погнулись после года или около того, как они прослужили. Лезвия новой конструкции увеличили размеры секций примерно в 1,5 раза и по-прежнему были легче старых лезвий.

Во-вторых, к телу было добавлено больше брони. Это решение было принято после количества ударов по шкивам и колесам. Детали рамы будут в целом утолщены, а боковая броня будет включена.
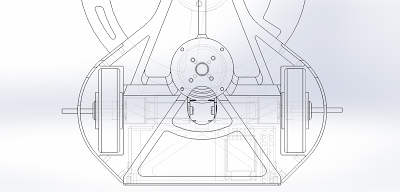
В-третьих, непрямой привод был заменен прямым приводом до серебряных искр 22:1 с мягкими колесами из пенопласта. Маленькие латунные микродвигатели-редукторы оказались ненадежными, а передаточные числа, которые я использовал, были слишком низкими, чтобы быть маневренными. В оригинальном ДДТ использовались коробки передач примерно 20:1, и он обладал превосходной мобильностью.
Наконец, материал клинка был изменен. На этот раз я хотел использовать предварительно твердые материалы, потому что мои попытки затвердеть были не на должном уровне. Стандартные 6-дюймовые лопасти были изготовлены для гидроабразивной резки из пружинной стали 1075/74 твердости 60C. Альтернативный набор лезвий был сделан для определенных типов противников. Они также были сделаны из разных материалов и имели разную геометрию.

Изготовление
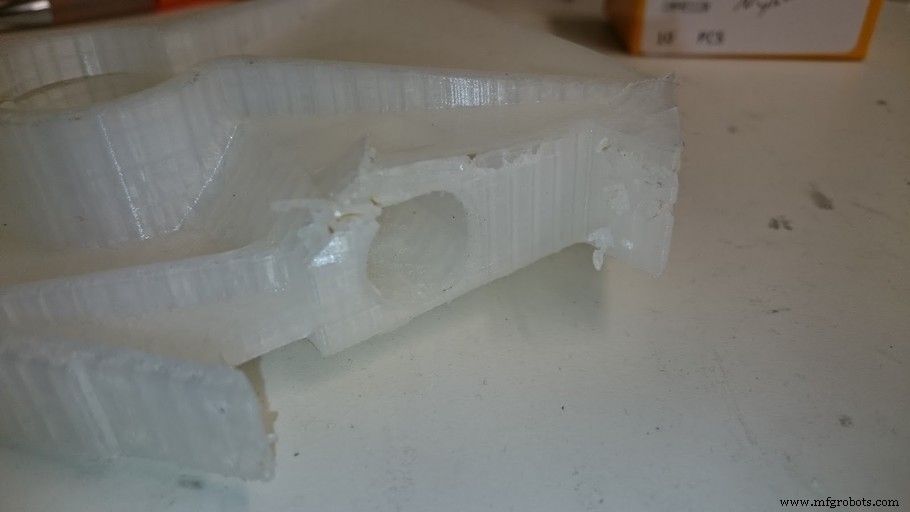
На печать кадра ушло почти 36 часов! По общему признанию, в настоящее время принтер работает медленно, особенно с добавлением волокна. Хотя в раме, безусловно, могло быть больше волокон, я решил оптимизировать для большей «высоты» волокна, чем глубины, и поэтому все слои имели волокно, но только отдельные слои имели полные слои.

Рама нуждалась в некоторой очистке, чтобы обеспечить правильную посадку деталей. Любые поднутрения обрабатывались шлифовальной коронкой с вращающимся инструментом для очистки участков, на которых размещались опорные конструкции. Это было критически важно для размещения приводных двигателей, отверстий под винты и других компонентов.

Важнейшая электроника была упакована в небольшой куб, который я сконструировал, используя свои навыки тетриса экспертного уровня. Этот небольшой кубик содержит приемник Orange RX, регулятор Turnigy Plush 10 ESC для оружия и два контроллера двигателя Vex 29 для каждого двигателя искры.

Кубик электроники должен вот так поместиться в рамку.

Двигатель был переработан из v2, и робот был подключен. Выделенный выключатель питания не использовался, поскольку в последнее время мне не повезло с выключателями Fingertech, и я был настроен скептически; вместо этого я решил использовать прямое подключение к батарее.
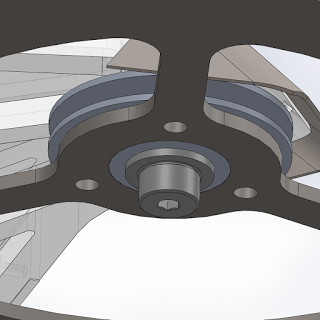
Также были изменены лопасти и шкив. Вместо того, чтобы размещать подшипник непосредственно в отверстии лезвия, как это делалось ранее, оба подшипника должны быть помещены в ступицу, а лезвие будет прикреплено болтами к шкиву. Круглая деталь на шкиве будет сопрягать лезвие концентрично со шкивом. Этот метод лучше, потому что он позволяет менять местами лопасти без разборки всего вала в сборе, он уменьшает перекос, потому что перекос больше не зависит от совмещения лезвия и шкива, и снижает удар подшипников за счет более мягкого среда между наружным диаметром подшипника и лопастью.
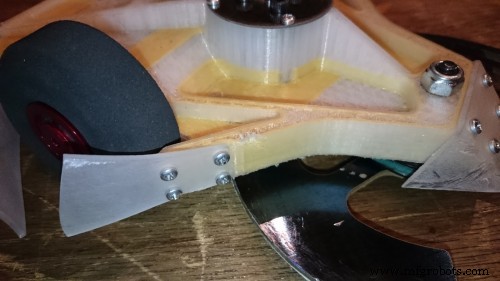
Наконец, боковая броня была сделана так, чтобы ее можно было обернуть по бокам. Они были вырезаны из прочного, но гибкого поликарбоната 0,0625. Однако при такой короткой длине и толщине стороны было трудно надеть и они были сильно нагружены. На это у меня не особо большие надежды; в ожидании сделал несколько копий.


Конечный вес был 15,5 унций! Очень удобный вес и есть пространство для маневра, которое можно улучшить.
Предварительные результаты
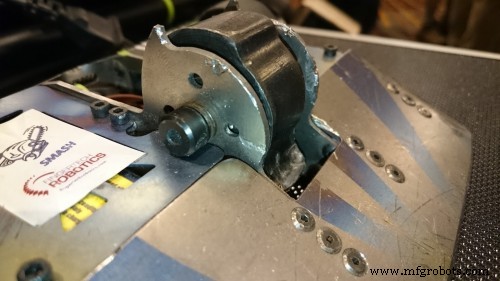
ДДТ имел возможность громить ряд предметов. Однако на самом деле никто из них не весил ни фунта. Тем не менее, эти тесты продемонстрировали заметные повреждения сверхвысокомолекулярных материалов, алюминия и даже других деталей из нейлона, напечатанных на 3D-принтере. Я не мог придумать лучшего способа отправить фрейм v2 навсегда!

Микробитвы Dragon Con 2015
Дебют DDT v3 состоялся на Dragon Con 2015, где он провел четыре матча и одержал 3 победы и 1 поражение. Я очень доволен его характеристиками и стойкостью печатной рамы. Я наполовину ожидал, что канал ствола оружия откроется после стольких ударов (включая удары по стенке арены), но он остается таким же верным, как и когда он был впервые сделан, вероятно, отчасти из-за тяжелого кевларового заполнителя вокруг критических размеров. Бои ДДТ представлены ниже. Мне очень повезло, что я несколько раз не вылетал из ямы, но, к сожалению, мне повезло, когда после сильного удара по Алгосу ДДТ полетел в яму.
ДДТ получил некоторые повреждения от Зеленого Жнеца, когда он перелез через лезвие и начал жевать раму. Я был удивлен, увидев, что не было нанесено большого ущерба, но только потому, что мой клинок не давал ему врезаться в раму, иначе наверняка был бы нанесен больший ущерб; часть волокна обнажена, что означает, что он получил глубину около 0,6 мм. Оба ограждения колеса взорвались о Алгоса, но я смог оставить хороший след на его Ti толщиной 0,0625 перед вылетом.


Я хочу найти больше возможностей для ДДТ бросить вызов другим антвесам. В октябре приближаются два конкурса; Я изо всех сил постараюсь принести туда ДДТ. Следите за обновлениями!
3D печать