


Носимая электроника на резиновой основе с высокой эластичностью для сбора энергии движения человека и автономного биомеханического отслеживания
Аннотация
Развитие растягиваемой интеллектуальной электроники привлекло большое внимание из-за ее потенциального применения в системах сбора энергии движений человека и технологиях биомеханического отслеживания с автономным питанием. Здесь мы представляем новый растягиваемый нитевидный трибоэлектрический наногенератор на основе резины (TENG), состоящий из покрытых серебром стеклянных микросфер / силиконового каучука в качестве растягиваемой проводящей нити (SCT) и SCT, покрытого силиконовым каучуком (SSCT) как другая трибоэлектрическая нить. Эластичный эластичный TENG в форме нити на основе резины (SATT) генерирует напряжение холостого хода 3,82 В и ток короткого замыкания 65,8 нА при 100% деформации и может реагировать на различные состояния движения пальцев. Кроме того, интеллектуальный текстиль с автономным питанием (SPST), сотканный блоками SCT и SSCT, имеет два типа рабочих механизмов:режимы растягивания-освобождения и разделения контактов. Взаимодействие растяжения-освобождения между вязальными узлами может генерировать напряжение холостого хода 8,1 В и ток короткого замыкания 0,42 мкА, а режим контактирования-разделения возникает между хлопком и двумя типами материала за пределами SPST, создавая пиковое напряжение 150 В и пиковый ток 2,45 мкА. Чтобы подтвердить перспективность применения, устройство SPST способно обеспечивать электроэнергией коммерческую электронику и эффективно поглощать биомеханическую энергию полного диапазона от движений суставов человека. Таким образом, эта работа обеспечивает новый подход к применению растягиваемой носимой электроники для выработки энергии и отслеживания с автономным питанием.
Введение
Носимая электроника с комфортом, мягкостью и воздухопроницаемостью, интегрированная в текстиль или одежду, широко используется во многих областях, таких как биомедицинские мониторы [1,2,3], бионические роботы [4,5,6], интерфейсы, взаимодействующие с человеком [ 7, 8], военной и бытовой электроники [9,10,11], которая является идеальным воплощением технологического бума и приносит много удобства и преимуществ в нашу жизнь. Однако для питания этой носимой электроники традиционные батареи и суперконденсаторы трудно удовлетворить их потребности в энергии из-за технических узких мест, связанных с жесткостью конструкции, ограниченным сроком службы, дополнительным весом устройства и загрязнением окружающей среды. Следовательно, актуальной проблемой является поиск нового устойчивого источника питания для носимой электроники. Для носимых приложений механическая энергия движения человека является повсеместной и относительно стабильной, которая, как ожидается, будет преобразована в электричество с помощью носимой электроники во время работы, превратившись в устойчивое многофункциональное электронное устройство с автономным питанием [12, 13]. Следовательно, это многообещающий метод использования технологии сбора механической энергии движения человека для создания носимого устройства с автономным питанием, которое могло бы преобразовывать измеренные сигналы в сигналы источника питания.
Среди различных подходов трибоэлектрические наногенераторы (TENG) [14,15,16,17], основанные на трибоэлектрической электрификации и электростатической индукции, могут эффективно поглощать механическую энергию движений человека, которая считается устойчивой мощностью или датчиком с автономным питанием из-за легкого веса. , экономичность, высокая эффективность, надежность и широкий выбор материалов. Недавно разработка нитевидных TENG, действующих как носимая электроника с автономным питанием, продемонстрировала свои достоинства в мониторинге физиологических сигналов человека, включая обнаружение движений тела, тактильное зондирование кожи, тестирование частоты пульса и т. Д. Hongzhi Wang представил нитевидный датчик со встроенным - конструкция с волнистой структурой для обнаружения и различения совместных движений человеческих тел [18]; однако растяжимость датчика является критическим препятствием при сложных движениях конечностей с большой нагрузкой. Более того, интеллектуальная текстильная электроника, состоящая из нитевидных TENG, показала свои преимущества в системах сбора энергии движений человека благодаря легкости интеграции с одеждой. Ван и его коллеги сшили пригодный для носки умный текстиль в одежду, чтобы стать мощной тканью [19], или реализовали текстиль TENG, основанный на хорошо разработанном методе ткачества пряжи [20]; однако стабильная высокая производительность по-прежнему является сложной проблемой для практических приложений. Кроме того, большинство растягиваемых электродов в предыдущей носимой электронике достигается за счет змеевидной металлической фольги [21, 22], осаждения на предварительно напряженной мягкой подложке [23, 24] и металлических нанопроволок [25], препятствующих использованию интеллектуальной текстильной электроники при ношении. и крупномасштабное изготовление.
Здесь, чтобы решить вышеупомянутые проблемы, мы представляем новый тип SATT с двойной спиральной структурой, состоящий из «стеклянных микросфер с серебряным покрытием / силиконового каучука» в качестве нити SCT и «SCT с покрытием из силиконового каучука» в качестве SSCT. нить. Благодаря хорошей совместимости материала сверхрастяжимой эластомерной матрицы, SATT может легко получить высокую 100% растяжимость для реализации конформной сборки в растягиваемых электронных системах. SATT длиной 5 см генерирует выходное напряжение 3,82 В и выходной ток 65,8 нА, который может действовать как активный носимый датчик для отслеживания состояний движения пальцев. Кроме того, SPST, сотканный из блоков SCT и SSCT, генерирует выходное напряжение 8,1 В и ток 0,42 мкА в режиме растяжения-отпускания, а максимальная мощность может достигать 163,3 мкВт в режиме разделения контактов. Таким образом, SPST может поставлять электрическую энергию для коммерческой электроники для поддержания нормального рабочего состояния, в то же время может эффективно собирать биомеханическую энергию полного диапазона от движений суставов человека, что имеет большое значение для содействия разработке практичных растягиваемых и переносных сборщиков энергии.
Методы
Изготовление SCT
Покрытые серебром стеклянные микросферы (Shenzhen Xiate Science and Technology Co. Ltd., Китай) равномерно диспергировали в твердой матрице из силиконового каучука (TN-920) с массовым соотношением 3:1 в течение 1,5 часов. Затем смесь помещали в шнековую экструзионную машину для проведения процесса экструзии и вулканизации при 110 ° C и получали проводящую композитную нить диаметром 1 мм. Было выбрано пять растяжимых проводящих нитей, которые должны быть намотаны вместе, и оба конца были покрыты смешанным силиконовым каучуком (Ecoflex 00-30) и отвердителем в массовом соотношении 1:1. Наконец, его поместили в вакуумную сушильную печь, откачивали в течение 20 минут и нагревали в течение 2 часов при 80 ° C. После отверждения и придания формы SCT может быть реализован как растяжимый композитный электрод.
Изготовление SSCT
SCT помещали в форму диаметром 4 мм. Затем смесь силиконового каучука (Ecoflex 00-30) с отвердителем вводили в форму. После вакуумирования и нагрева SSCT был подготовлен с помощью технологии извлечения из формы.
Система измерения
Образцы охарактеризованы методом автоэмиссионной сканирующей электронной микроскопии (ZEISS EVO18, Carl Zeiss Jena, Германия). Характеристики выходного напряжения и тока регистрировались системным электрометром KEITHLEY 2611B.
Результаты и обсуждение
SATT состоит из двух двойных спиралей, полностью состоящих из каучука:одна представляет собой SCT с использованием покрытых серебром стеклянных микросфер, равномерно диспергированных в матрице из силиконовой резины, а другая - SSCT с использованием SCT с покрытием из силиконовой резины. Подробный процесс изготовления SATT показан на рис. 1a. Стеклянные микросферы, покрытые серебром (75 мас.%), Смешивали со сверхэластичным силиконовым каучуком путем смешивания, который впоследствии подвергали экструзии и вулканизации с помощью шнековой экструзионной машины для получения проводящей композитной нити (рис. 1a I). Затем были выбраны пять поддающихся растяжению проводящих нитей, которые должны были быть намотаны вместе в качестве электрода SCT, и концы нитей были связаны, чтобы предотвратить раскручивание во время последующего изготовления (рис. 1а (II)). Учитывая высокую способность накапливать электроны, силиконовый каучук с превосходными механическими свойствами был тщательно выбран в качестве оберточного материала для герметизации электрода. А именно, SSCT был подготовлен и рассмотрен как другая трибоэлектрическая нить (рис. 1a (III)). Наконец, SCT и SSCT были переплетены друг с другом, чтобы сформировать эластичный, износостойкий и недорогой полностью резиновый TENG в форме резьбы с двойной спиральной структурой (рис. 1a (IV)). Изображение SSCT, полученное с помощью сканирующей электронной микроскопии (SEM), показано на рис. 1b. Очевидно, что пять токопроводящих нитей плотно покрыты силиконовым каучуком для достижения единой структуры, направленной на то, чтобы на внутренних токопроводящих нитях возникало больше индуцированных зарядов. Как показано на рис. 1c, d, покрытые серебром стеклянные микросферы разного диаметра плотно заделаны в силиконовый каучук, что может показаться трехмерной проводящей сетчатой структурой в резиноподобной матрице. Следовательно, SCT обладает исключительной проводимостью и замечательной способностью к растяжению. Чтобы дополнительно продемонстрировать хорошую совместимость гомогенной органической матрицы, СЭМ-изображения увеличенного места соединения между SCT и силиконовым каучуком с покрытием показаны на рис. 1e, f. По-видимому, между токопроводящими нитями и силиконовым каучуком с покрытием нет зазора, поэтому они представляют собой хорошо продуманную интегрированную структуру. На рисунке 1g показан полученный SATT с двумя спиралями, поглощающими энергию, а нижнее изображение на рисунке 1g показывает растяжимость SATT. Результат показывает, что TENG в форме резьбы может быть удлинен до ≈ 100%, что значительно превосходит предыдущие отчеты о TENG на основе резьбы [26,27,28].
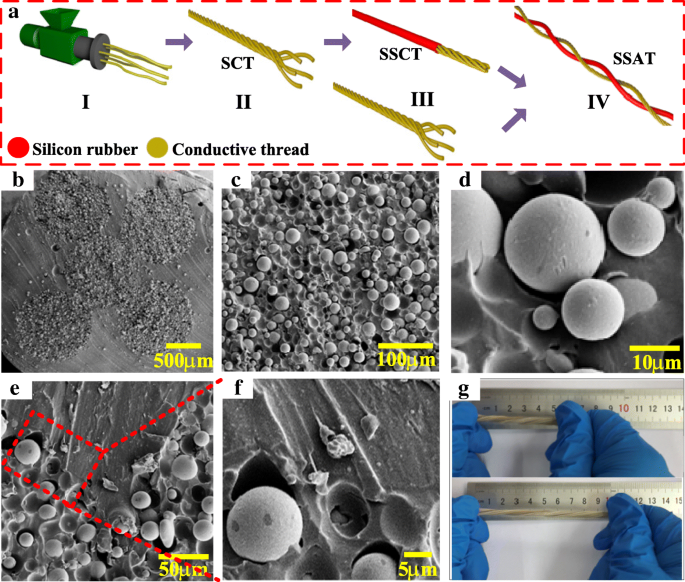
а Принципиальная схема процесса изготовления устройства SATT. б - г СЭМ-изображение поперечного сечения SSCT при разном увеличении. е , f СЭМ-изображение положения соединения между SCT и силиконовым каучуком с покрытием при разном увеличении. г Фотографии приготовленного SATT с демонстрацией растяжения при ≈ 100% деформации.
Несмотря на сложную структуру двойной спирали, SATT можно представить как большое количество конденсаторов, соединенных параллельно, без учета краевого эффекта. Таким образом, рабочий механизм SATT может быть упрощен до типичного процесса разъединения контактов между SCT и SSCT в циклах растяжения-высвобождения. Механизм выработки электроэнергии SATT, основанный на взаимодействии эффектов контактной электризации и электростатической индукции, показан на рис. 2а. В исходном состоянии поверхность силиконового каучука принимает отрицательные заряды, в то время как эквивалентный положительный заряд генерируется на электроде, соответственно, из-за электризации контактов. Когда к SATT прикладывается растягивающее напряжение, расстояние между поверхностью силикона и электродом увеличивается, что вызывает разность электрических потенциалов. Электроны проходят между двумя электродами через внешние цепи, в результате чего возникает электрический ток. Пока расстояние не станет достаточно большим, существует равновесное состояние электронов, останавливающее перенос. Когда растягивающее напряжение снимается, электроны движутся между электродами в обратном направлении, чтобы реализовать баланс заряда. После полного восстановления САТТ до исходного состояния заряды снова полностью нейтрализуются. Таким образом, SATT может генерировать выходную электрическую энергию в непрерывных периодических движениях с растяжением-отпусканием.
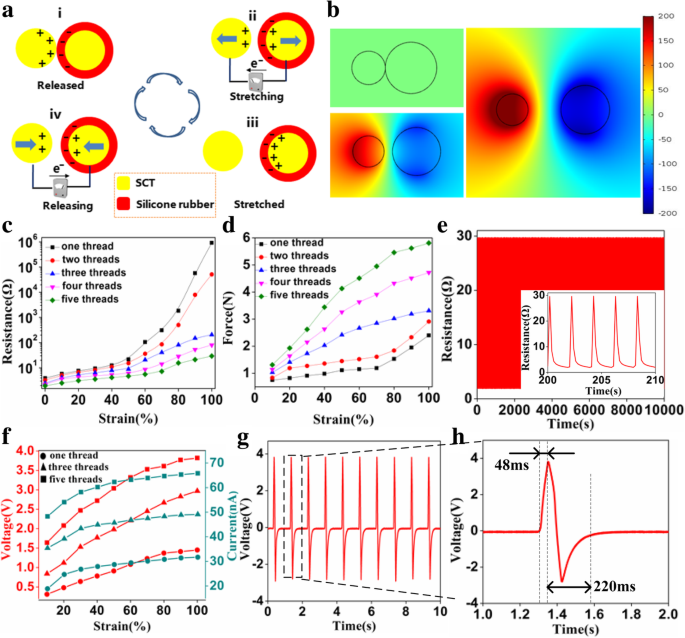
а Механизм выработки энергии САТТ при растяжении-отпускании. б Результаты моделирования потенциальных распределений с помощью программы COMSOL. c Сопротивления токопроводящих нитей длиной 5 см при различных креплениях деформации. г Сила растяжения, испытываемая разным количеством токопроводящих нитей, в зависимости от величины деформации. е Испытание на прочность при растяжении SCT при 100% -ной деформации. е Выходные напряжения и токи токопроводящих нитей при различных деформациях крепления. г Напряжение холостого хода САТТ длиной 5 см при 100% деформации. ч Увеличенный вид области, обозначенной черным пунктиром на панели g
Кроме того, мы разработали моделирование методом конечных элементов (МКЭ) на основе программного обеспечения COMSOL для количественного анализа рабочего механизма SATT. В этой модели две плотности трибозарядов ± 1 мкКл / м 2 назначаются на поверхности резьбы. Следует отметить, что количество начальных зарядов на поверхности резьбы влияет только на расчетный электрический потенциал; однако тенденция относительного изменения электрического потенциала будет неизменной. На рисунке 2b показано распределение электрического потенциала SATT при различных растягивающих усилиях. Когда внешней растягивающей силы нет, разность потенциалов всего устройства почти равна нулю. Когда SATT растягивается наружу, положительный и отрицательный трибо-заряды разделяются, и разность потенциалов будет увеличиваться. Следовательно, очевидно, что результаты моделирования с помощью программного обеспечения COMSOL согласуются с процессом теоретического анализа вышеуказанного рабочего механизма.
Для удобно растягиваемого электрода электрическая проводимость является достаточно важным фактором. Предлагаемый растягиваемый нитевидный электрод с покрытыми серебром стеклянными микросферами, диспергированными в эластомере силиконового каучука, растягивается при различных деформациях, вызывая различную электропроводность. Необходимо систематически изучать взаимосвязь между количеством токопроводящих нитей, длиной натяжения и сопротивлением электрода. На рис. 2с показаны сопротивления от одной до пяти токопроводящих нитей длиной 5 см при различных креплениях для деформации. В диапазоне деформации 50% сопротивление электродов с разным количеством токопроводящих нитей практически не изменяется в процессе растяжения и освобождения. Однако с увеличением степени деформации, чем больше число токопроводящих нитей, тем ниже значение сопротивления электрода. На рис. 2d показана сила растяжения, испытываемая различным количеством проводящих нитей, в зависимости от величины деформации. Очевидно, что растягивающая сила будет увеличиваться с увеличением количества проводящих нитей. Учитывая, что их легче стимулировать растягивающей силой, пять переплетенных проводящих нитей выбраны в качестве SCT-электрода в этой работе. Прочность на растяжение SCT в пределах 100% деформации была выполнена, как показано на рис. 2e. Результаты показывают, что SCT является превосходным проводящим эластомером, особенно демонстрирующим очень стабильную обратимость. Кроме того, были выполнены электрические выходные характеристики двухспиральных энергопоглощающих нитей, как показано на фиг. 2f. По мере увеличения количества проводящих нитей площади контакта между электродом и силиконовой резиной увеличиваются, что приводит к большему переносу зарядов между трибоэлектрическими нитями при растягивающе-высвобождающих движениях. Соответственно, увеличивается как выходное напряжение холостого хода, так и ток короткого замыкания. На рисунке 2g показано, что SATT длиной 5 см может генерировать напряжение холостого хода 3,82 В и ток короткого замыкания 65,8 нА при 100% деформации. Увеличенный вид одного цикла напряжения показан на рис. 2h. Следует отметить, что время отклика и восстановления SATT, состоящего из SCT и SSCT, составляет 48 мс и 220 мс при 1 Гц, соответственно. Следовательно, ожидается, что SATT будет использоваться в качестве автономного датчика растяжения для отслеживания физиологических сигналов человека.
Механическая энергия движений человека является часто используемым энергоресурсом из-за ее различных преимуществ, таких как универсальность, возобновляемость и стабильность. «Умный» текстиль и «умная» одежда, собирающая механическую энергию от движений человека, широко исследуются [29,30,31]. Однако из-за отсутствия превосходной растяжимости комфорт умных тканей, основанных на гибких полосках, является чрезвычайно важным фактором, препятствующим разработке интеллектуальных тканей. Принимая во внимание превосходную растяжимость устройства SATT, здесь предлагается легкий, удобный и пригодный для носки автономный текстильный материал. Блоки SCT и SSCT были вплетены в SPST традиционным полотняным переплетением. Схематическое изображение и фотография устройства SPST (5 × 7 см 2 ) представлены на рис. 3а, б. Стоит отметить, что биологические движения обычно считаются удлиненными при деформации 5–30%, что требует гораздо более высокой деформационной совместимости носимой электроники для обеспечения долгосрочной стабильной работы при механическом напряжении [32,33,34]. На рис. 3с представлен схематический график растяжения преднамеренно растянутой 100% деформации устройства SPST с использованием линейного двигателя. Рабочий механизм растягивания-отпускания SPST такой же, как и у SATT, но основное внимание уделяется соединению всех терминалов STC в качестве тестового порта и электродов в SSTC вместе в качестве другого тестового порта. Напряжение холостого хода и ток короткого замыкания устройства SPST составляют около 8,1 В и 0,42 мкА в процессе растягивающе-отпускающего возбуждения соответственно (рис. 3d, e). Благодаря высокой растяжимости и стабильным выходным характеристикам SPST может действовать как автономное устройство для мониторинга, поглощающее кинетическую энергию растяжения для суставов человека.
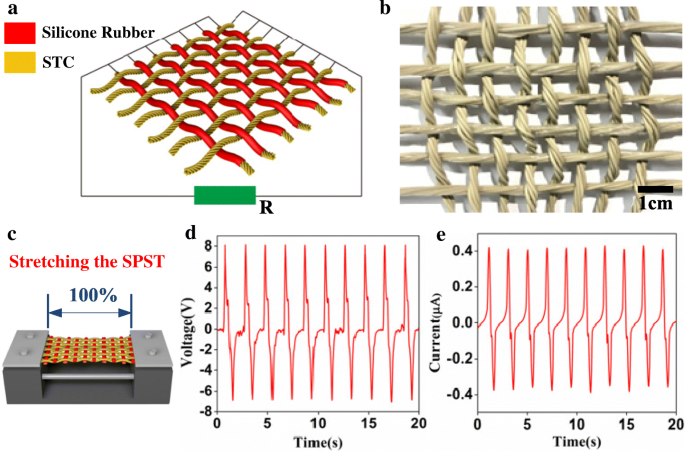
а Схематическое изображение SPST. б Фотоизображение СПСТ. c Схематический график растяжения SPST при 100% деформации. г Выходное напряжение и е выходной ток SPST при периодических циклах растяжения-отпускания
Кроме того, учитывая, что устройство SPST проявляет процесс разделения контактов с другими тканями одежды во время реальных движений человека, выходные характеристики с постукиванием SPST-хлопка были достигнуты в периодическом процессе постукивания линейного двигателя (рис. 4a). Механизм выработки электроэнергии с использованием SPST-хлопка показан на рис. 4b. В периодических циклах постукивания происходит разделение контактов между хлопком и двумя типами материала вне SPST. Таким образом, заряды электростатической индукции протекают между электродами SPST. На рис. 4c, d показаны напряжения холостого хода и токи короткого замыкания под действием силы 100 Н. Примечательно, что напряжение холостого хода SPST составляет около 150 В при различных частотах ответвлений, которые не зависят от рабочей частоты. Однако токи короткого замыкания SPST составляют около 0,96, 1,31, 1,55, 1,77 и 2,45 мкА с частотами 0,5, 1, 1,5, 2 и 3 Гц соответственно. Это связано с тем, что время разделения контактов становится короче по мере увеличения частоты, так что равное количество зарядов вызывает больший ток (Isc =dQsc / dt). Кроме того, SPST действовал как устройство энергоснабжения, обычно подключаемое к внешней нагрузке на практике. Дополнительный файл 1:На рисунке S1 представлены выходные напряжения как функция сопротивлений внешней нагрузки от 1 МОм до 1 ГОм. Выходные мощности SPST, подключенного к внешним нагрузкам с различными уровнями, могут быть получены, поскольку выходная мощность определяется U 2 /Р. Очевидно, что выходная мощность сначала увеличивается, а затем уменьшается, достигая максимального значения 163,3 мкВт, когда сопротивление внешней нагрузки составляет около 120 МОм. Кроме того, тестирование стабильности SPST было проведено для 10 000 циклов, как показано в Дополнительном файле 1:Рисунок S2. Очевидно, что выходное напряжение SPST не снижалось в периодических циклах тестирования, поэтому SPST имеет замечательно долгий срок службы. Электроэнергия, вырабатываемая при постукивании SPST-хлопка, может накапливаться в конденсаторах для питания носимой электроники. На рисунке 4д показано, что кривые зарядки различной емкости при частоте 3 Гц и силе 100 Н. Напряжение конденсатора 0,47 мкФ можно заряжать до 14 В за 150 с. При увеличении емкости конденсатора требуется больше времени для достижения такого же высокого напряжения. Благодаря выдающимся выходным характеристикам устройство SPST-cotton могло напрямую включать светодиоды и приводить в действие коммерческие электрические часы за счет электрической энергии, хранящейся в конденсаторе (рис. 4f и дополнительный файл 2:видео S1, S2). Эти результаты показывают, что устройство SPST может обеспечивать электроэнергией коммерческую электронику для поддержания нормальной работы.
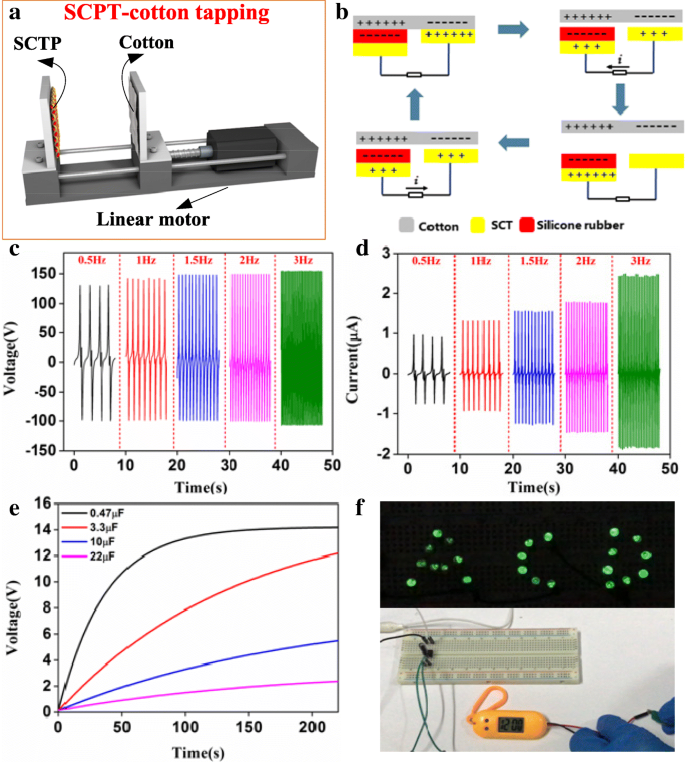
а Схематическое изображение метчика SPST-cotton. б Механизм выработки электроэнергии с нарезкой из SPST-хлопка. c Напряжения холостого хода и d токи короткого замыкания при отводах из СПСТ-хлопка на разных частотах отвода. е Измерены кривые напряжения различных конденсаторов при частоте 3 Гц и силе 100 Н. f Светодиоды и электрические часы приводились в движение устройством SPST-cotton
Будучи растяжимым и легко монтируемым в большинстве частей тела, нитевидный TENG может выступать в качестве активного носимого электронного устройства для обнаружения движений тела. Как показано на рис. 5а и в дополнительном файле 2:видео S3, устройство SATT было зафиксировано на индексной фигуре субъекта, чтобы реагировать на пять состояний движения сгибание-освобождение. Ясно, что пики выходного напряжения увеличиваются с увеличением амплитуды движения, а именно, выходные контрольные сигналы определяются величинами растягивающих движений. Поведение подтверждает, что SATT может использоваться как активный датчик с автономным питанием без внешнего источника питания для количественной характеристики состояний движения пальцев. Кроме того, напряжения холостого хода SPST, сотканного с помощью блоков SCT и SSCT, стабильны и не зависят от рабочей частоты, что может использоваться в качестве выходных сигналов мониторинга движения. Как показано на рис. 5b, c, SPST был закреплен на суставах человеческого тела для сбора энергии и мониторинга состояния. Когда проявляется поведение сгибания и разгибания в локтевом и коленном суставах, возникает режим растяжения-высвобождения из SPST и режим разделения контактов из SPST-cotton, в результате чего генерируются чередующиеся электрические сигналы. Очевидно, что устройство SPST полностью удовлетворяет требованиям к эластичности смарт-ткани, и выходные напряжения могут достигать примерно 105 В и 116,9 В при максимальных углах изгиба в локтевых и коленных суставах соответственно. Выходные токи отклика составляют около 0,73 мкА и 0,89 мкА соответственно. Следовательно, тщательно разработанный SPST представляет собой многообещающий метод питания для носимой электроники, поглощая энергию движения суставов тела, и будет играть чрезвычайно важную роль в приложениях для реабилитационного обучения пациентов и отслеживания активности.
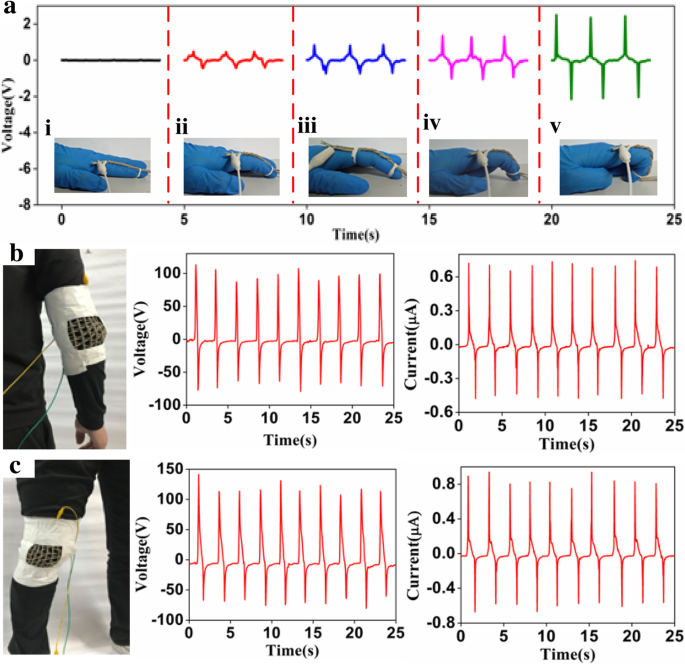
а SATT как активный датчик с автономным питанием для определения состояний движения пальцев. б SPST фиксируется на локте c колено для сбора энергии и мониторинга состояния
Заключение
Таким образом, эта статья демонстрирует недавно разработанную эластичную носимую электронику на основе резины в форме нитей с использованием стеклянных микросфер с серебряным покрытием и силиконового каучука в качестве исходных материалов. SATT со 100% -ной деформацией может преобразовывать механическую энергию растяжения в электрическую энергию за счет электростатического эффекта и продемонстрирован как датчик с автономным питанием для количественного отслеживания движений суставов пальцев. Кроме того, трибоэлектрические нити SCT и SSCT вплетены в SPST с традиционным полотняным переплетением, которое генерирует напряжение холостого хода 8,1 В и ток короткого замыкания 0,42 мкА за счет растягивающего-отпускающего взаимодействия между вязальными узлами и максимальной выходной мощности 163,3 мкВт при сопротивлении внешней нагрузки 120 МОм в способе постукивания SPST-хлопок. Благодаря стабильному и высокому выходному напряжению, SPST был определен как эффективный источник питания для снабжения электрической энергией коммерческой электроники. Будучи растяжимым и пригодным для носки, SPST представляет собой эффективное решение для сбора биомеханической энергии от движений суставов человека, и ожидается, что он получит большой потенциал для применения в медицинских системах и технологиях интеллектуального отслеживания с автономным питанием.
Доступность данных и материалов
Все данные, полученные или проанализированные в ходе этого исследования, включены в эту опубликованную статью и файлы с дополнительной информацией к ней.
Сокращения
- SATT:
-
Эластичный резьбовой ТЭН на резиновой основе
- SCT:
-
Эластичная токопроводящая нить
- SEM:
-
Сканирующая электронная микроскопия.
- SPST:
-
Умный текстиль с автономным питанием
- SSCT:
-
SCT с силиконовым каучуковым покрытием
- TENG:
-
Трибоэлектрический наногенератор
Наноматериалы
- Future Electronics:платформа быстрой разработки для тепловидения и ИК-зондирования
- Нановолокна и нити для улучшенной доставки лекарств
- Наночастицы для терапии рака:текущий прогресс и проблемы
- Оптимизация высокоотражающей тонкой пленки для полноугольных микро-светодиодов
- Миниатюрные растягиваемые и высокоскоростные линейные суперконденсаторы
- Наночастицы альбумина, содержащие ресвератрол, с длительным кровообращением и улучшенной биосовместимостью…
- Носимый датчик газа для мониторинга здоровья и окружающей среды
- 3D-система отслеживания движения для автономных технологий
- Соединения для управления:коммуникационные интерфейсы для датчиков положения и движения
- Устройство питает датчики носимых устройств посредством движений человека