


Сверхчувствительный датчик деформации на основе гибкой пьезоэлектрической пленки из поливинилиденфторида
Аннотация
Была продемонстрирована гибкая матрица датчиков 4 × 4 с 16 микромасштабными емкостными элементами на основе гибкой пьезоэлектрической поливинилиденфторидной пленки (ПВДФ). Пьезоэлектричество и морфология поверхности PVDF были исследованы с помощью оптической визуализации и силовой микроскопии пьезоотклика (PFM). PFM показывает фазовый контраст, указывая на четкую границу раздела между PVDF и электродом. Электромеханические свойства показывают, что датчик демонстрирует отличный выходной отклик и сверхвысокое отношение сигнал / шум. Выходное напряжение и приложенное давление имеют линейную зависимость с крутизной 12 мВ / кПа. Выходные характеристики с удержанием и отпусканием восстанавливаются менее чем за 2,5 мкс, демонстрируя выдающийся электромеханический отклик. Кроме того, с помощью теоретического моделирования исследовали интерференцию сигналов между соседними массивами. Результаты показывают, что интерференция уменьшается с уменьшением давления со скоростью 0,028 мВ / кПа, хорошо масштабируется с размером электрода и становится незначительной для уровня давления ниже 178 кПа.
Фон
Поливинилиденфторид (ПВДФ) представляет собой химически стабильный пьезоэлектрический полимерный материал, который имеет множество применений в различных областях благодаря своим пироэлектрическим, пьезоэлектрическим и сегнетоэлектрическим свойствам [1, 2]. В частности, благодаря выдающимся механическим свойствам (модуль Юнга 2500 МПа и прочность в точке разрыва ~ 50 МПа) датчик давления на основе ПВДФ демонстрирует хорошие механические свойства, такие как гибкость и устойчивость к усталости [3, 4]. По сравнению с широко используемыми датчиками давления на основе сегнетоэлектрических материалов семейства PZT, датчик давления на основе PVDF нетоксичен и биосовместим [5, 6]. Наиболее важно то, что датчик на основе PVDF был более мягким и жестким, чем датчик на основе PZT, из-за высокого коэффициента гибкости пленки PVDF, которой можно было придать необходимую форму для измерения сложной деформации [7, 8]. Соответственно, датчик давления на основе PVDF считается одним из потенциально гибких биодатчиков для определения характеристик давления в быстро развивающейся области биомедицины [9, 10]. Sharma et al. разработан датчик давления для умного катетера с пленкой ПВДФ; его можно интегрировать в катетер для измерения давления в реальном времени [11]. Bark et al. разработали систему датчика пульсовой волны для ненавязчивого измерения сигналов пульсовой волны сердца от ладоней водителя на основе PVDF; Результаты показывают, что сенсорная система может выдавать четкие сигналы пульсовой волны для анализа вариабельности сердечного ритма, который может использоваться для определения бдительности водителя и предотвращения дорожно-транспортных происшествий [12]. Ли и др. изготовил сенсор с наноструктурами PVDF и ZnO, который мог обнаруживать изменения давления и температуры для искусственной кожи [13]. Однако датчик определяет давление только в одной точке большого размера.
Реальные приложения, такие как исправленный биосенсор для определения давления человеческого тела, требуют многоточечного зондирования, структурной гибкости и сверхвысокой чувствительности [14,15,16]. В этой опубликованной работе демонстрируется гибкая матрица датчиков 4 × 4 на основе пьезоэлектрической пленки PVDF, демонстрирующая сверхвысокую чувствительность 12 мВ / кПа и быструю реакцию на выходе 2,5 мкс. Охарактеризованы величина и пространственное распределение давления, оказываемого на палец человека.
Дизайн и экспериментальная часть
Разработка и изготовление массива датчиков
Предлагаемая матрица датчиков имеет многослойную структуру на основе тонкой пленки ПВДФ толщиной около 50 мкм (Jinzhou Kexin Inc., Китай). Матрицы алюминиевых электродов толщиной 20 мкм были покрыты с обеих сторон пленкой ПВДФ. На рис. 1а представлена схематическая конструкция датчика. Датчик имеет 16 микроконденсаторов; каждые 4 блока используют один соединительный провод, чтобы минимизировать количество электродных проводов.
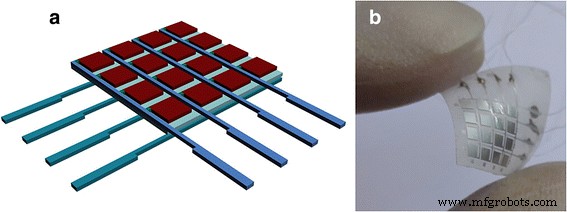
а Принципиальная схема сенсорной матрицы. б Физическая картина конечного устройства
Для изготовления сенсорной матрицы в качестве жесткой подложки было приготовлено предметное стекло, покрытое полидиметилсилоксаном (ПДМС). Тонкая пленка ПВДФ, покрытая Al с обеих сторон, была загружена на подложку. Затем фоторезист наносился центрифугированием на поверхность пленки со скоростью 3000 об / мин в течение 40 с. После фотолитографии и влажного травления Al с помощью системы выравнивания масок (ABM, Inc., США) были приготовлены 16 конденсаторных блоков с квадратной структурой 4 × 4. После этого гибкий датчик на подложке PDMS был снят с предметного стекла. Электроды каждого конденсатора были соединены с токопроводящими проводами через серебряный клей. Для обеспечения хорошей биосовместимости датчик был упакован, покрыт сверху PDMS и нагрет в течение 12 часов при 60 ° C. На рис. 1b представлена фотография изогнутого датчика давления, показывающая, что датчик является гибким.
Пьезоэлектрические свойства матрицы датчиков на основе пленки PVDF
Исследование с помощью силовой микроскопии пьезоотклика (PFM) (Seiko, Inc., Япония) было проведено для характеристики морфологии поверхности и пьезоэлектрических свойств пленки PVDF предлагаемого датчика при напряжении смещения переменного тока 2 В с размером области сканирования 2 × 2 мкм 2 .
Калибровка массива датчиков
Для калибровки датчика на предложенный датчик на электромеханической экспериментальной платформе, подключенной к оборудованию сбора данных (DAQ-USB6008) от National Instruments, прикладывались различные давления. Сбор данных с четырьмя дифференциальными аналоговыми сигналами был установлен с помощью дифференциальной модели. Сигнал выходного напряжения от предложенного датчика был получен путем изменения связи между матрицей датчиков и DAQ.
Результаты и обсуждение
На рис. 2а показана морфология поверхности сенсора после травления Al, проверенная с помощью оптического микроскопа. Довольно яркий и темный контраст предполагает четкую границу раздела между PVDF и травлеными алюминиевыми электродами. На рис. 2б, в показаны морфология поверхности и фазовый сигнал пленки ПВДФ датчика давления. Указывается, что поверхность ПВДФ гладкая с тканевой структурой. Фазовое изображение измерения PFM на рис. 2c показывает сильный отклик пьезоэлектрической области, который согласуется со структурой поверхности, показанной на рис. 2b. Эти результаты позволяют предположить, что сенсор на основе пленки PVDF после изготовления демонстрирует хорошие пьезоэлектрические характеристики.
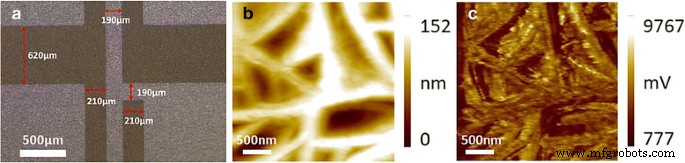
а Морфология поверхности предлагаемого сенсора после технологии травления. б Морфология поверхности и c фазовые PFM изображения пленки PVDF сенсора
Типичный результат выходного сигнала показан на рис. 3а при приложении постоянного давления 98,1 кПа к одному из прямоугольных электродов датчика [17]. x -axis и y -оси показывают время и выходное напряжение квадратного электрода датчика соответственно. Выходное напряжение было преобразовано из заряда (Q), генерируемого пленкой PVDF датчика. На основе уравнения пьезоэлектричества (где d 33 - пьезоэлектрическая постоянная, когда направление поляризации совпадает с направлением электрического поля и F Z означает, что на z оказывается давление -направление с тем же направлением, что и d 33 ), можно установить связь между выходным напряжением и давлением. Необработанные данные были получены с применением полосы частот 49–51 Гц. Линия стрелки на этом рисунке указывает на сигналы около 123,1 мВ, которые были созданы давлением, приложенным к датчику. Выходное напряжение датчика по давлению четко отображается в сигнале с низким уровнем шума и высоким отношением сигнал / шум. Чтобы подтвердить синхронные свойства матрицы датчиков, к четырем блокам датчика одновременно было приложено одинаковое давление 113,2 кПа. Сигналы выходного напряжения, индуцированные давлением, показаны на рис. 3б. Почти такое же выходное значение около 190 мВ было получено от четырех блоков датчика одновременно, что позволяет предположить, что матрица датчиков продемонстрировала высокую стабильность и синхронность при приложении многоточечного давления. Для калибровки матрицы датчиков к ней прикладывались различные давления в диапазоне 60–150 кПа; выходное напряжение в зависимости от приложенного давления были получены и построены в виде калибровочной кривой, показанной на фиг. 3c, которая показывает линейную зависимость. Наклон линейной кривой составляет около 2,9 мВ / кПа, а калибровочная кривая имеет смещение -159,2 мВ.
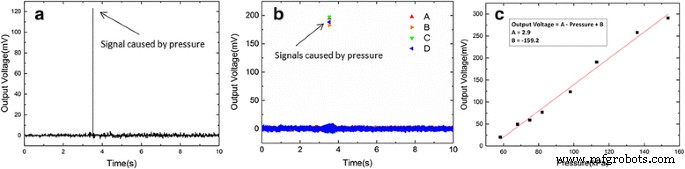
Отфильтрованные выходные напряжения для a квадрат электрода и b четыре квадрата электродов матрицы датчиков. c Подгонка калибровочной кривой лайнера предлагаемого датчика
Выходной отклик с удержанием и отпусканием одного квадратного электрода датчика был получен путем приложения импульсного давления с различными частотами. Построенная кривая на рис. 4a показывает типичный отклик датчика при приложении импульсного давления около 75,1 кПа с частотой 90 Гц. Положительное выходное напряжение соответствует сжатию квадрата электродов матрицы датчиков, а отрицательное выходное напряжение соответствует релаксации. Как видно на вставке к рис. 4a, аналогичный выходной отклик с удержанием и отпусканием также наблюдался в чистой пьезоэлектрической пленке PVDF [18]. Время отклика выходного напряжения датчика составляет менее 2 мс, что говорит о том, что датчик демонстрирует хорошие электромеханические характеристики отклика. На матрицу датчиков прикладывались импульсные давления в диапазоне 60–150 кПа. Кривые отклика на выходе при удерживании и отпускании показаны на рис. 4b. Датчик показывает стабильную характеристику электромеханического отклика со временем отклика около 2 мс при разных давлениях, а выходные напряжения датчика при разных давлениях согласуются с линейной калибровочной кривой, полученной выше.
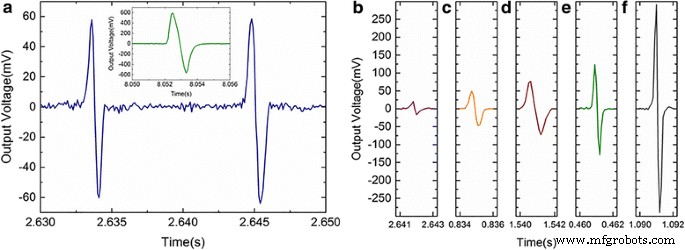
Выходная реакция удержания и отпускания от давления a 75,1 кПа, b 58,2 кПа, c 67,8 кПа, d 81,9 кПа, эл. 98,1 кПа и f 153,6 кПа; на вставке показан выходной отклик при удержании и отпускании, полученный от голой пленки PVDF
Далее изучается приложение давления на избирательную точку. Показана интерференция сигналов между соседними решетками, когда на электрод одной из решеток было приложено давление. Моделирование интерференции сигналов проводилось с помощью COMSOL Multiphysics на массивах. Площадь каждого электрода 1,4 мм 2 . Геометрия конструкции показана на рис. 5а. Дополнительная деформация, возникающая при приложении давления к электроду A, видна на рис. 5b, указывая на то, что деформация увеличивается по мере удаления от электрода A. Было изучено влияние разности потенциалов при уровне давления 20 ~ 80 кПа, показанном на рис. Рис. 5в. Разность потенциалов и давление имеют линейную зависимость с крутизной 0,028 мВ / кПа и пересечением 5 × 10 −4 . мВ, что означает помехи очень низкого уровня. Давление ниже 178 кПа вызовет помехи сигнала менее 5 мВ, что незначительно [16, 17]. Кроме того, была исследована зависимость интерференции от размера массива электродов. На рисунке 5d показан результат с размерами электродов 1,2, 1,0 и 0,8 мм 2 . . Он показывает, что линейная зависимость между разностью интерференционных потенциалов и давлением (в диапазоне 20 ~ 60 кПа) все еще может наблюдаться в самом маленьком электроде. Подходящие наклоны для интерфейсного напряжения составляют 0,01748, 0,01181 и 0,00574 мВ / кПа, соответственно, для трех структур с отмеченным наблюдением пониженного потенциала помех при меньшем размере электрода.
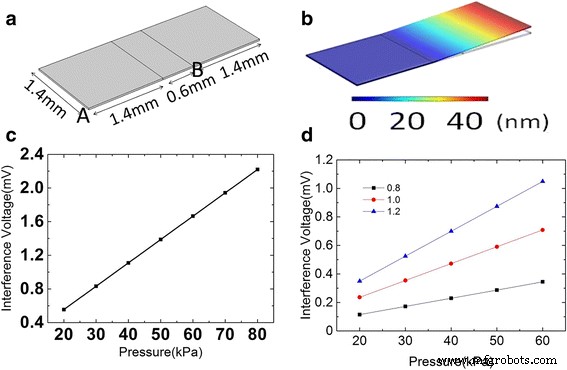
а Физические размеры, используемые для теоретического моделирования. б Смещение и c Подгонка кривой лайнера между напряжением помех и приложенным давлением с размером массива 1,4 мм. г Получены результаты при размерах массива 0,8, 1,0 и 1,2 мм соответственно
Для простого практического применения датчик применялся для измерения уровня давления и распределения пальца руки человека. Как все мы знаем, сложное движение пальцев состоит из некоторых базовых навыков, таких как шиацу, разминание, растирание, трение и так далее [19]. В наших экспериментах были выбраны три наиболее часто используемых движения, включая шиацу, разминание и растирание, чтобы проверить состояние давления и распределение пальца. На рис. 6 показан снимок распределения давления на большом пальце, определяемый датчиком, во время трех движений пальца соответственно. На рис. 6а можно ясно видеть, что давление 76 кПа было сосредоточено в центре большого пальца во время движения шиацу, что сильно отличается от разминания и трения, показанных на рис. 6b, c, соответственно. На рисунке 6b показано, что давление на переднюю часть большого пальца выше, чем на другие части пальца во время разминающего движения, в то время как давление большого пальца довольно равномерно (около 68 кПа) во время растирающего движения, как показано на фиг. 6c. Наблюдаемое распределение давления в пальце несколько похоже на предыдущие отчеты клинических наблюдений [17, 20]. Согласно нашим измерениям, тензодатчик на основе гибкой сегнетоэлектрической пленки PVDF оказался чувствительным для характеристики сложных движений пальцев. Ожидается, что с помощью предлагаемого датчика будет более точно изучено умение работать с человеческим пальцем, а также было бы полезно разработать робота, который заменит человеческие пальцы в будущем.
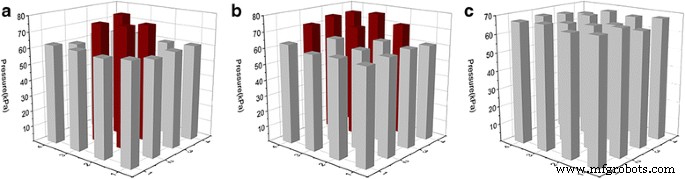
Состояние давления и распределение движения большого пальца, характеризуемого предлагаемым датчиком: a шиацу, б разминание и c руб.
В заключение, матрица датчиков 4 × 4 с 16 конденсаторными блоками на основе пьезоэлектрической тонкой пленки PVDF была изготовлена и упакована с PDMS. Матрица датчиков демонстрирует гибкие и высокочувствительные свойства. Выходной отклик датчика при удерживании и отпускании был получен путем приложения импульсного давления с различной частотой, что указывает на то, что матрица датчиков может генерировать сигналы напряжения 20–300 мВ в течение 2 мс при приложении давления в диапазоне 60–150 кПа. Очевидно различное распределение давления в пальце во время движения пальца руки человека было обнаружено с помощью предлагаемого датчика, который, как ожидается, более точно исследует навыки человеческих пальцев.
Сокращения
- PFM:
-
Силовая микроскопия пьезоотклика
- PVDF:
-
Поли (винилиденфторид)
Наноматериалы
- Датчик артериального давления - работа и его приложения
- Пьезоэлектрический датчик:схема, характеристики и применение
- Infineon:сверхмалый датчик атмосферного давления
- Датчик атмосферного давления обеспечивает повышенную точность
- Цифровой датчик барометрического давления BMP180 I2C
- Проект Интернета вещей на основе Raspberry PI Подключение датчика DHT11
- Износостойкий датчик давления из жидкого металла
- Сенсорная пленка для аэрокосмической отрасли
- Сверхчувствительные микродатчики потока
- Что такое пьезорезистивный датчик?