


Работа тактильного датчика и его типы
WSG -DSA - это палец захвата, который объединяет тактильное распознавание для обратной связи профиля с высоким разрешением во время захвата. Для сенсорных целей он использует интеллектуальный тактильный преобразователь DSA9205i. Он устанавливается на верхней части базовых губок WSG и напрямую связан с контроллером захвата через встроенный порт датчика в базовых губках, поэтому не требуются внешние компоненты и кабели для включения тактильного устройства в ваши манипуляционные приложения. Эти типы датчиков пальца обнаруживаются автоматически и параметризуются WSG. Профиль давления можно использовать изнутри контроллера захвата с помощью мощного интерфейса сценариев. В этой статье рассматриваются типы тактильных датчиков и их работа.
Что такое тактильный датчик?
Тактильный датчик - это устройство. Он измеряет поступающую информацию в ответ на физическое взаимодействие с окружающей средой. Чувство осязания у людей обычно моделируется, то есть кожное ощущение и кинестетическое чувство. Кожное прикосновение позволяет обнаруживать раздражители, возникающие в результате механической стимуляции, боли и температуры. Кинестетическое прикосновение принимает сенсорные сигналы от рецепторов, находящихся внутри мышц, сухожилий и суставов.

Типы тактильных датчиков
Существуют различные типы тактильных датчиков, которые приведены ниже
- Датчик силы / крутящего момента
- Динамический датчик
- Датчик температуры
Датчик силы / крутящего момента
Датчики силы / крутящего момента используются в сочетании с тактильным массивом для предоставления информации для управления силой. Эти типы датчиков могут воспринимать нагрузку в любом месте, например, на дистальном звене манипулятора, и в ограничениях, как датчик кожи. Датчик кожи обычно обеспечивает более точное измерение силы при более широкой полосе пропускания. Если звено манипулятора определено в общем и предполагается контакт точки сигнала, то датчик силы / момента может дать информацию о месте контакта силы и моментов - это называется внутренним тактильным восприятием. Изображение датчика крутящего момента показано ниже.

Динамический датчик
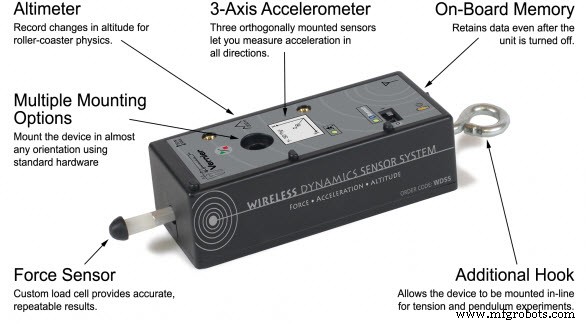
Динамические датчики - это акселерометры меньшего размера, расположенные на полосках или на коже пальца робота. Общая функция подобна тельцам Пачини у людей и имеет одинаково большие соответствующие поля; таким образом, одного или двух акселерометров кожи достаточно для всего пальца. Эти датчики эффективно обнаруживают установление и разрыв контакта, вибрации, связанные со скольжением по текстурированным поверхностям.
Датчик уровня стресса - это второй тип динамических тактильных датчиков. Если кончик пальца скользит со скоростью несколько см / с в целом по поверхности с небольшими неровностями или ямками, временные изменения на коже становятся важными. Пьезоэлектрический полимер, такой как PVDF, создает заряд в ответ на повреждение, который может быть применен для создания тока, который прямо пропорционален диапазону изменения.
Датчик температуры
Температурные датчики важны для способности человека определять материалы, из которых изготовлены объекты, но некоторые из них также используются в робототехнике. Термическое зондирование включает в себя определение температурных градиентов на коже, которые соответствуют как температуре, так и теплопроводности объекта. Роботизированные термодатчики участвуют в переходах Пельтье в сочетании с термисторами.

Принцип работы и принципиальная схема тактильного датчика
Тактильные датчики разработаны для обеспечения тактильного восприятия для телеоперационных манипуляторов и интеллектуальных роботов. Тактильные датчики могут идентифицировать нормальную силу, приложенную к тактильным пикселям, чтобы гипнотизировать контроль силы и тактильные изображения, а также для распознавания объектов. Однако для получения тактильных изображений и нормальных сил информация о тангенциальном движении имеет решающее значение для контроля силы и предотвращения скольжения, что завораживает успех задачи - поэтому требуются трехмерные тактильные датчики.
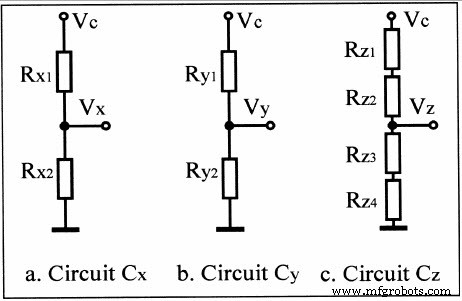
Существует несколько трехмерных тактильных датчиков, разработанных с использованием пьезорезистивных, емкостных и дополнительных чувствительных элементов, и эти тактильные датчики изготовлены по технологии MEMS. Интегрированные чувствительные элементы и схемы предварительной обработки предназначены для компактности, но они слишком слабы и легко ломаются для большинства приложений; и, например, диапазон силы тактильного датчика составляет всего 0,01 Н w4x, а другие тактильные датчики не предусмотрены технологией MEMS. На приведенной ниже схеме показана схема тактильного датчика.
Тактильный датчик в робототехнике
Тактильный датчик, который используется в роботах НАСА, представлен ниже
- Один из примеров, напрямую связанных с исследованием планет.
- НАСА использует эти датчики на международной космической станции для помощи людям в ремонте / обслуживании окружающей среды
- НАСА испробовало множество тактильных датчиков в робототехнике, которые находятся на начальной стадии. Они использовали резистор, чувствительный к силе, и теперь используются композиты для квантового туннелирования.
- Несколько кнопок и ячеек загрузки стали практикой для разработки тактильных датчиков, производимых промышленным роботом.
Приложения тактильного датчика
Приложения тактильных датчиков используются в
- Робототехника
- Компьютерное оборудование
- Система безопасности
- Устройства с сенсорным экраном на мобильном телефоне
- Вычисления
Преимущества тактильного датчика
Преимущества тактильного датчика приведены ниже:
- Они предлагают простые в использовании решения для тактильных датчиков.
- Тактильный датчик не имеет внешних компонентов и кабелей.
- Компактное извлечение
- Проверенная технология тактильного распознавания от робототехники.
Речь идет о принципе работы тактильного датчика и его применении. мы надеемся, что данная информация будет полезна для предоставления хорошей информации и понимания проекта. Кроме того, если у вас есть какие-либо вопросы относительно этой концепции в электрических и электронных проектах, вы можете прокомментировать их в разделе ниже. Вот вам вопрос - каковы функции тактильных датчиков?
Авторские фото:
- Квадратное пространство тактильного датчика
- Способы измерения датчика силы / крутящего момента
- Нониус динамического датчика
- Изображения термодатчика - amazon
Датчик
- Как работает датчик расстояния и его применение
- Что такое датчик IMX586:работа и его особенности
- Как работает датчик веса и его характеристики
- Работа виртуального датчика и его приложения
- Работа датчика напряжения и его применение
- Лямбда-датчик - работа и его применение
- Работа датчика IMU и его приложения
- Работа датчика занятости и его приложения
- Работа дверного датчика и его применение
- Работа датчика NFC и его приложения