


Будущее робототехники
Будущее робототехники раздается. Любой сложный робот представляет собой распределенный набор модулей и систем, некоторые из которых являются автономными, некоторые полуавтономные, а некоторые управляются человеком, и все они тесно взаимодействуют друг с другом, чтобы сформировать единую связную систему взаимодействующих частей. В телеробототехнике мы стремимся обеспечить дистанционное управление роботом и дать оператору ощущение того, что он находится там, где робот развертывается, путем предоставления видео и сил взаимодействия обратно операторам-людям.
Для ЕКА это означает в космосе или на враждебной поверхности планеты. Человек-оператор может находиться на космической станции или даже на Земле!
Для этого мы обеспечиваем телеприсутствие посредством комбинации тактильной обратной связи с оператором в сочетании с видео в дополненной реальности.
Обеспечение обратной связи с глазами и прикосновением к пользователю обеспечивает возможность телеприсутствия. Чем более реалистична и информативна обратная связь, тем сильнее ощущается телеприсутствие оператора, что приводит к более эффективной удаленной работе робота.
Важнейшей проблемой для ЕКА в области космической телеоперации является канал связи. В роботах существует множество контуров управления в реальном времени, но один между человеком и удаленным роботом в системе дистанционного управления является наиболее проблематичным. Несколько контуров управления проходят по сетевому каналу с коммутацией пакетов, который демонстрирует наихудшее поведение связи. Он может отключиться в любой момент, задержка часто измеряется секундами и сильно варьируется, плюс потеря пакетов - обычное явление; это так же верно как для общения через Интернет, так и для общения в космосе. Тем не менее, мы должны отправлять все видео по этой ссылке, время коррелирует с состоянием управления роботом и командами управления на обоих концах. Это означает, что статус связи должен стать неотъемлемой частью контура управления, с достаточной информацией, доступной на обоих концах, чтобы оператор мог адекватно реагировать, а удаленный робот поддерживал себя в безопасном и стабильном состоянии. Состояние связи должно стать неотъемлемой частью состояния системы.
Команда разработчиков ESA состоит из инженеров-мехатроников, специалистов по компьютерному зрению, теоретиков систем управления и нескольких инженеров-программистов. На раннем этапе нам было ясно, что нам необходимо найти общий метод для обсуждения системных потребностей и интерфейсов, особенно когда нас просят предоставить сложные распределенные системы, включающие несколько компьютеров, различные аппаратные и программные платформы для работы; мы остановились на данных. Мы думаем о данных как о средстве понимания состояния системы, как о средстве представления видеокадров и как о средстве представления теории управления. Таким образом, имело смысл подойти к нашей среде разработки и разработке системы с ориентацией на данные. Наряду с острой необходимостью понимать статус соединения как часть дистанционной работы, мы неумолимо были вынуждены оценить DDS (службу распределения данных). НАСА уже активно использовало DDS в своих системах космической связи, но может ли DDS также обеспечивать дистанционное управление по такому сложному каналу, позволяя в реальном времени контролировать то, что действительно является самым сложным из соединений? Это новая неизведанная научная территория, и от этого тем более захватывающая. Первоначальные показания весьма обнадеживают.
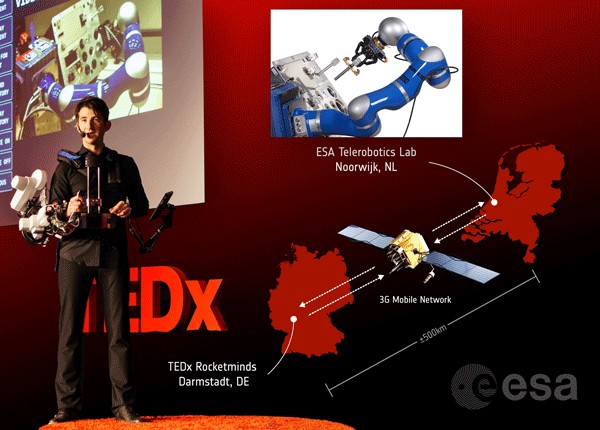
В этой живой демонстрации на TEDx RheinMain RocketMinds в мае 2014 года я использовал прототип экзоскелетной руки EXO-1 для удаленного управления роботизированной рукой, которая физически находилась в нашем ESA Telerobotics. И лаборатория Haptics на расстоянии более 500 км. Моей задачей было подобрать металлический штифт и вставить его в отверстие с допуском на зазор менее 0,5 мм. Вся демонстрация была запущена через Интернет-соединение телефона 2G WAN, потому что запланированное соединение 3G было неожиданно недоступно! В закрытой комнате, заполненной людьми с телефонами в карманах, пропускная способность была сильно ограничена и фактически демонстрировала тип соединения, существующий в космосе, или даже намного хуже. Хуже не может быть, если удаленная работа по каналу связи имеет задержки в 15 секунд со значительной потерей данных. Тем не менее, DDS, работающий по каналу 2G, справился со всеми коммуникациями для тактильной обратной связи, контура управления манипулятором робота и видео манипулятора робота в лаборатории (транслировалось на планшет на моей руке и локально клонировалось для отображения на главный экран TEDx).
Возможно, он еще не в космосе, но точный телероботический контроль на больших расстояниях и сложные каналы передачи данных с визуальным обзором и тактильной обратной связью буквально в пределах нашей досягаемости, и мы продемонстрировали это широкой аудитории. .
ОБНОВЛЕНИЕ :Эксперимент Haptics-1 был проведен на борту Международной космической станции астронавтом НАСА Барри Уилмором. Первое предварительное испытание было проведено 30.12.2014. Haptics-1 - это первый в истории космический эксперимент с роботизированной обратной связью. Поздравляю! читать дальше
В космосе впервые используется # образная обратная связь! Сегодня @ Space_Station # haptics-1 успешно проводится! pic.twitter.com/30zD5GzGqs
- ESATelerobotics (@ESATelerobotics) 30 декабря 2014 г.
Если у вас есть история об использовании Connext DDS, которой вы хотели бы поделиться, напишите нам по адресу blogadmin@rti.com.
Интернет вещей
- Будущее Live TV
- Будущее за… Индустрия 4.0
- Будущее за… Сотрудничество
- Периферийные вычисления:архитектура будущего
- Визуализация будущего обслуживания завода
- Робототехника и будущее производства и работы
- Будущее центров обработки данных
- Будущее логистических технологий:век Китая?
- История робототехники в производстве
- AutoStore:будущее автономных складских помещений