


Ключевые факторы при разработке электронного управления скоростью дрона
Ключом к конструкции дрона является способность управлять скоростью и вращением двигателя. Большинство дронов приводится в движение бесщеточными двигателями постоянного тока, которые требуют постоянного регулирования скорости и направления вращения. Модуль электронного управления скоростью (ESC) выполняет эти функции и включает в себя каскад источника питания, схему измерения тока, микроконтроллер и интерфейс связи с системой управления полетом, что делает его фундаментальным для дронов. В этой статье рассматриваются важные элементы, которые следует учитывать при разработке ESC, а также рыночные решения для разработки.
Управление двигателем
Дизайн ESC требует тщательной оценки и анализа характеристик, которые можно резюмировать следующим образом:
- Батарея установлена на дрон.
- Моторы
- Доступный бюджет
- Электромагнитная совместимость (ЭМС) и помехоустойчивость
На дроны могут быть установлены два типа бесщеточных двигателей:бесщеточные двигатели постоянного тока (BLDC) и бесщеточные двигатели переменного тока (BLAC), также известные как синхронные двигатели с постоянными магнитами (PMSM). На выбор типа двигателя влияет выбранный алгоритм управления, который может быть трапециевидным или полевым (FOC). Алгоритм управления трапециевидным двигателем имеет следующие основные характеристики:
- Управление двигателем на основе шестифазной последовательности переключения
- Обнаружение магнитного угла ротора, используемого для установки правильного угла; каждый шаг соответствует углу 60 °.
- В бессенсорных системах управления угол переключения оценивается путем измерения фазного напряжения обратной ЭДС.
С другой стороны, алгоритм управления FOC имеет следующие особенности:
- Управление двигателем с помощью синусоидальных фазных напряжений или токов (FOC)
- Определение угла ротора с минимальной точностью от 1 ° до 5 °, что гарантирует, что алгоритм всегда может обеспечить максимальный крутящий момент.
В системах управления без датчиков магнитный угол двигателя оценивается по фазным напряжениям и токам двигателя. Его положение определяется путем контроля определенных электрических параметров двигателя и без использования дополнительных датчиков. Наиболее распространенным типом, используемым в дронах, является бесщеточный двигатель постоянного тока из-за его небольшого размера, относительно невысокой стоимости, а также высокой прочности и надежности.
Большинство дронов имеют как минимум четыре двигателя, из которых чаще всего используется четырехмоторная версия. ESC отвечает за управление скоростью каждого двигателя, и поэтому наиболее распространенная архитектура дронов предполагает использование ESC для каждого двигателя. Все ESC должны иметь возможность связываться друг с другом прямо или косвенно через полетный контроллер, чтобы можно было легко управлять дроном. Также важно направление вращения каждого двигателя:в квадрикоптере одна пара двигателей вращается в одном направлении, а другая - в противоположном.
Техника управления двигателем, наиболее часто используемая производителями ESC, - это управление с ориентацией на поле, метод, который управляет крутящим моментом и скоростью двигателя. При правильной реализации FOC может справляться даже с быстрыми изменениями ускорения без создания нестабильности, позволяя дрону выполнять сложные маневры с максимальной эффективностью.
Блок-схема на Рисунке 1 ниже показывает архитектуру FOC, которая включает в себя следующие компоненты:
- Регулятор тока, состоящий из двух встроенных пропорциональных регуляторов
- Дополнительный внешний регулятор скорости контура и генератор опорного тока.
- Преобразования Кларка, Парка и обратные преобразования Парка для преобразования из неподвижных кадров в синхронные вращающиеся.
- Алгоритм пространственного векторного модулятора для преобразования команд vα и vβ в сигналы широтно-импульсной модуляции, подаваемые на обмотки статора.
- Защитные и вспомогательные функции, включая логику запуска и выключения.
- Дополнительный наблюдатель для оценки углового положения ротора, если требуется бессенсорное управление.
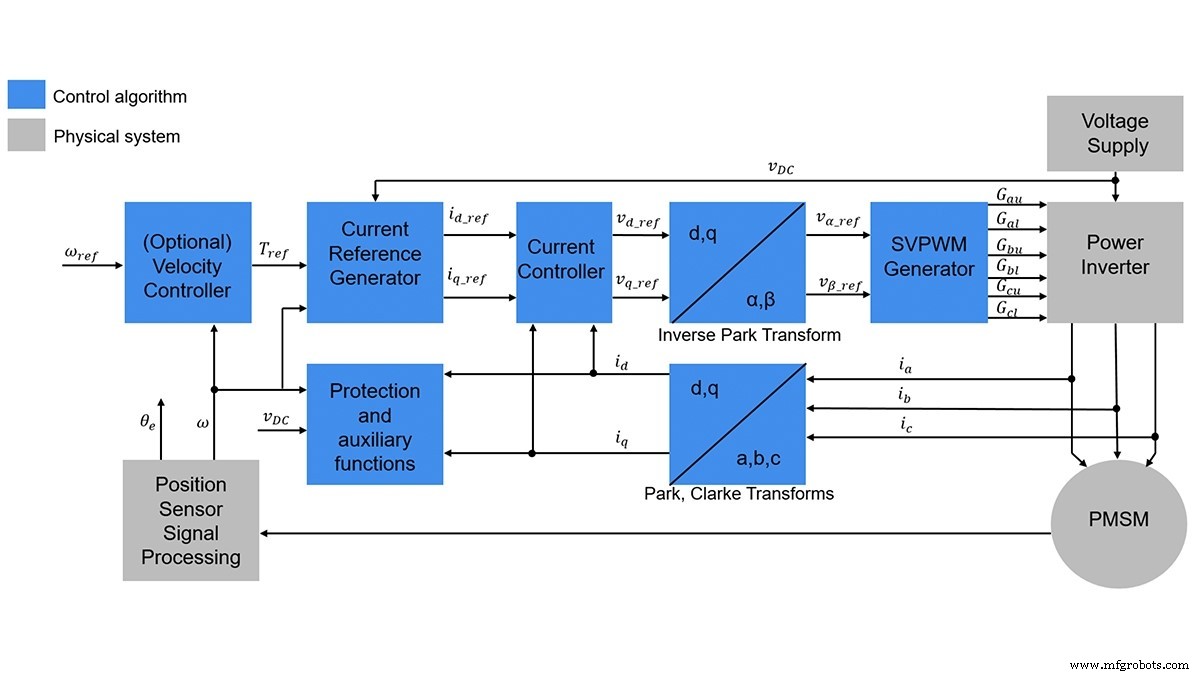
Рисунок 1. Блок-схема полевого управления (Источник:Mathworks)
Инженеры по управлению двигателями, проектирующие ВОК, выполняют несколько задач, включая разработку архитектуры контроллера с двумя ПИ-регуляторами для токового контура, оптимизацию коэффициентов усиления всех ПИ-регуляторов для удовлетворения требований к производительности и проектирование модулятора пространственного вектора для управления ШИМ.
После выбора алгоритма управления (трапециевидный или FOC) следующим шагом будет выбор между системой управления без обратной связи или с обратной связью. При управлении без обратной связи синхронный двигатель (BLDC или BLAC) приводится в действие посредством управляющего сигнала и предполагается, что он следует заданному управляющему действию. В системе управления с обратной связью схема может проверить, движется ли двигатель должным образом. Если это не так, система управления автоматически компенсирует чрезмерное или недостаточное движение, уменьшая или увеличивая силу тока.
При использовании системы управления с обратной связью или без обратной связи (без датчиков) необходимо измерять токи и напряжения, чтобы использовать их в качестве сигналов обратной связи. На рисунке 2 показана типичная измерительная установка, подходящая как для трапецеидальных, так и для синусоидальных систем управления. При использовании трапециевидного управления с бессенсорным алгоритмом трехфазные напряжения используются бессенсорным алгоритмом для расчета угла ротора.
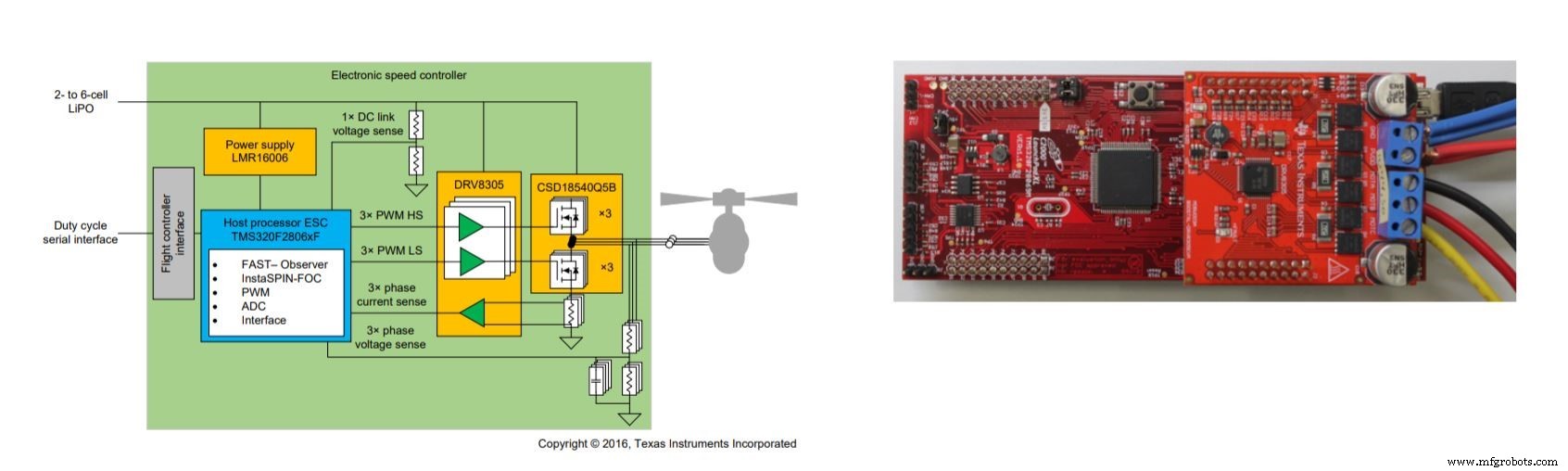
Рис. 2. ESC с бездатчиковым управлением двигателем. Справа - эталонная конструкция высокоскоростного безсенсорного FOC для регуляторов скорости дрона от Texas Instruments, а слева - его блок-схема. (Источник:Texas Instruments)
Динамика квадрокоптера
Механическая простота и аэродинамическая устойчивость дронов связаны с скоординированным использованием двигателей и их маневров. В квадрокоптере пара двигателей, расположенных по диагонали конструкции, вращается в том же направлении, но в направлении, противоположном двум другим двигателям. Если все четыре двигателя вращаются с одинаковой скоростью, дрон может набирать высоту, снижаться или оставаться в горизонтальном полете. Если диагональная пара вращается быстрее, чем другая, дрон вращается вокруг своего центра тяжести и остается в той же горизонтальной плоскости (рис. 3).
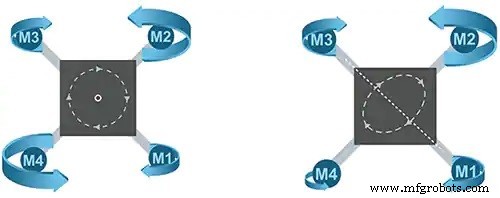
Рис. 3. Дроны используют различные комбинации скоростей ротора для выполнения маневров. (Источник:STMicroelectronics)
Если вы измените скорость головного (или хвостового) винта, дрон будет указывать вверх или вниз, как самолет с неподвижным крылом, ныряющий вниз. Регулировка крутящего момента влево или вправо заставит дрон катиться, заставляя его вращаться вокруг своей оси. Система управления полетом дрона должна изменить соответствующую скорость ротора для достижения высоты полета, необходимой для выполнения желаемого маневра.
Для инженера по управлению коррекция скорости - это обычная проблема обратной связи контура управления, которая решается с помощью пропорционального, интегрального, производного (ПИД) регулятора.
Разработка ESC
Для разработки ESC для дронов требуются высококачественные компоненты, специально разработанные для управления двигателями с высокой частотой вращения (12000+ об / мин). Компания Texas Instruments разработала семейство микроконтроллеров под названием InstaSPIN, которое упрощает разработку приложений для управления трехфазным двигателем. InstaSPIN-FOC, подходящий для систем без датчиков, оснащен быстрым программным кодировщиком с управлением крутящим моментом и скоростью, подходящим для любого трехфазного двигателя. InstaSPIN-MOTION предназначен для систем без датчиков и обеспечивает управление положением, скоростью и крутящим моментом для любого трехфазного двигателя.
Полный эталонный дизайн для этих прицелов предоставлен TI и состоит из технологий управления двигателями InstaSPIN-FOC и InstaSPIN-MOTION. Платформа включает 32-битный микроконтроллер TI C2000 InstaSPIN. Он позволяет разработчикам определять, автоматически настраивать и управлять трехфазным двигателем, быстро обеспечивая стабильную и функциональную систему управления двигателем.
STMicroelectronics предлагает полный эталонный дизайн ESC, реализующий бессенсорный алгоритм FOC. Эталонный дизайн ESC STEVAL-ESC001V1 подходит для коммерческих дронов начального уровня и управляет любым трехфазным бесщеточным двигателем (или PMSM), питаемым от аккумуляторных батарей 6S LiPo или любого эквивалентного источника питания постоянного тока, с пиковым током до 30 А. STEVAL-ESC001V1 позволяет разработчикам быстро разрабатывать свои приложения благодаря полному предварительно сконфигурированному пакету прошивки (STSW-ESC001V1), реализующему бессенсорный управляемый алгоритм, ориентированный на поле, с трехшунтовым считыванием тока, контролем скорости и полным активным торможением. Пакет прошивки / программного обеспечения STSW-ESC001V1 плюс библиотека MC пакета разработки программного обеспечения STM32 PMSM FOC позволяет оптимизировать конструкцию ESC, воздействуя на параметры FOC, встроенные в MCU STM32, и использует профилировщик двигателя ST для быстрого получения соответствующих параметров двигателя. Бессенсорный алгоритм FOC ST может быть адаптирован к любому трехфазному двигателю BLDC или PMSM, обеспечивая более длительное время полета и оптимальные динамические характеристики (рисунки 4 и 5).
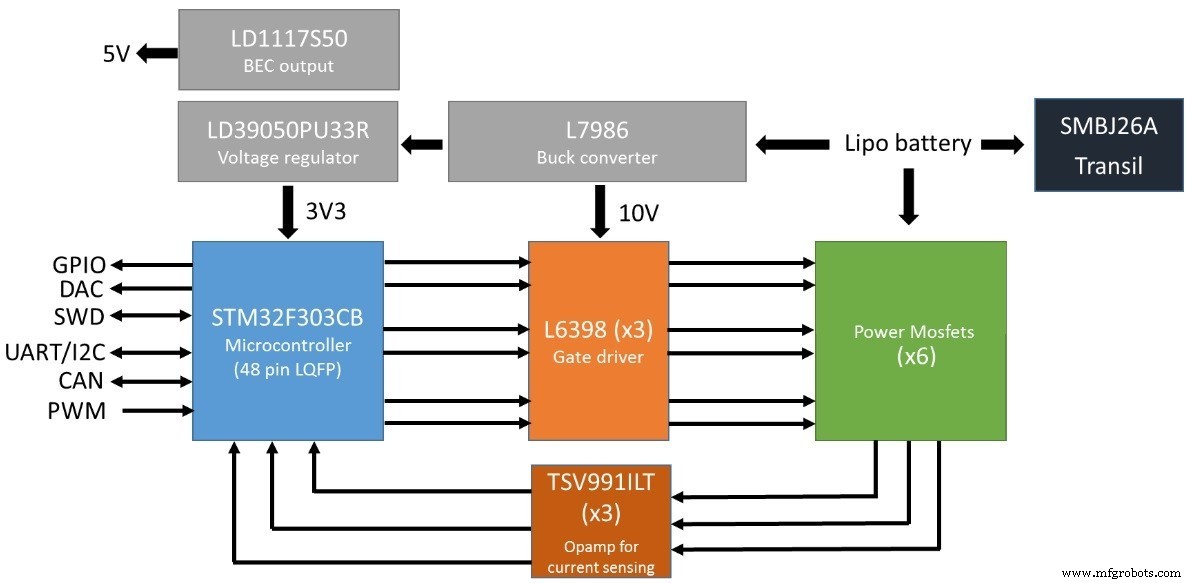
Рис. 4. Блок-схема решения STEVAL-ESC001V1 от ST (Источник:STMicroelectronics)
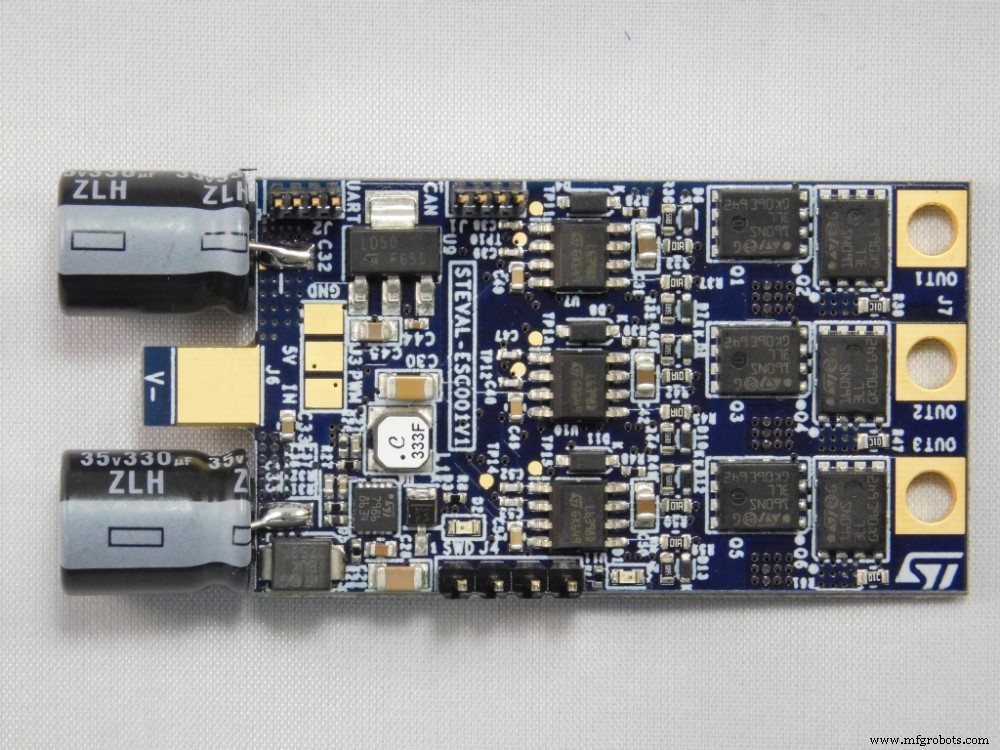
Рис. 5. Плата STEVAL-ESC001V1 от ST (Источник:STMicroelectronics)
Платформа разработки дронов HoverGames представляет собой модульное и гибкое аппаратное / программное решение NXP, которое можно использовать для создания любого автономного транспортного средства, от дронов и вездеходов до БПЛА. Комплект разработчика по существу основан на микропроцессоре с Linux и Open CV и различных сопутствующих датчиках для управления полетом.
Контроллер полета гарантирует, что дрон остается стабильным. Плата имеет открытый исходный код и позволяет устанавливать другие внешние датчики для оптимизации работы в соответствии с функциональностью.
Батарея LiPo и радиотелеметрия для конкретной страны должны быть реализованы с использованием одного из соединений IoT. Для полной функциональности комплекта вам нужно будет выбрать, какой из двух доступных радиостанций телеметрии приобрести. С помощью телеметрии вы можете иметь прямое соединение с транспортным средством во время полета и можете видеть состояние дрона во время полета, загружать и контролировать автономные путевые точки, а также вносить любые необходимые изменения. Данные телеметрии отправляются на станцию управления, но также сохраняются на борту летательного аппарата.
Компоненты комплекта также включают модуль питания постоянного тока, модуль GPS NEO-M8N с креплением, аварийный выключатель, зуммер, яркий светодиодный индикатор состояния RGB, кабель SEGGER J-Link EDU Mini / FTDI USB-TTL-3V3 / отладочную плату с кабелем , Бесщеточные двигатели BLDC 2212 920 кВ и контроллеры двигателей ESC 40 A OPTO (Рисунок 6).
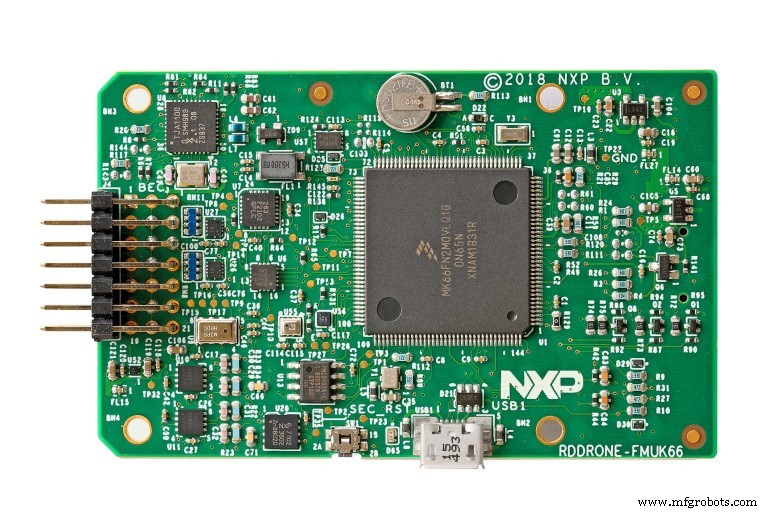
Рис. 6. Летательный аппарат RDDRONE-FMUK66 (Источник:NXP)
>> Эта статья была первоначально опубликована на наш дочерний сайт Power Electronics News.
Связанное содержание:
- Разработка электронных регуляторов скорости для дронов.
- Дроны продолжают использовать решения для беспроводной зарядки.
- Датчик LiDAR поддерживает получение изображений с высоким разрешением на БПЛА.
- Комплекты для разработчиков предлагают платформы для проектирования цифровых источников питания и управления двигателями.
- Разработка элементов управления двигателями для робототехнических систем.
- Слияние датчиков дает множество преимуществ.
Чтобы получить больше информации о Embedded, подпишитесь на еженедельную рассылку Embedded по электронной почте.
Встроенный
- Разрешающие схемы и схемы блокировки
- Renesas расширяет возможности микроконтроллера для сервоуправления в промышленных роботах
- Разработка элементов управления двигателями для роботизированных систем
- Контроллер мотора объединяет ядро Arm Cortex-M0
- Контроль качества - первый шаг к надежности двигателя
- Контроль натяжения при обработке паутины – ключевые компоненты
- Встроенные компрессоры с регулируемой скоростью:8 ключевых преимуществ
- Что определяет скорость гидравлического двигателя
- Как вы управляете скоростью гидравлического двигателя?
- От чего зависит скорость гидравлического двигателя?