


Как один инженер добился беспылевой роботизированной гравировки с помощью RoboDK
Можете ли вы действительно добиться беспыльной гравировки робота? Один студент университета использовал RoboDK и изготовленный на заказ концевой эффектор для роботизированной фрезеровки, не получая древесной стружки по всему цеху. Вот как они это сделали.
Гравировка становится все более популярной задачей в производстве. Персонализация становится нормой для многих различных продуктов, а гравировка позволяет производителям легко добавлять собственные логотипы и рисунки на свои продукты. Роботизированная гравировка — это простой способ повысить ценность продукта с минимальными дополнительными усилиями.
Один студент немецкого университета разработал систему гравировки по дереву с помощью роботизированного фрезерования и робота для совместной работы в RoboDK. Что особенно интересно в этом проекте, так это то, что он включает в себя специальный концевой эффектор, чтобы избежать образования слишком большого количества пыли и древесной стружки.
Представляем… Яна Госедоппа
Этот проект был разработан несколько лет назад студентом Яном Госедоппом в рамках получения степени бакалавра технических наук в Университете прикладных наук Хамм-Липпштадт в Германии.
Мы пишем о его проекте сейчас, потому что роботизированная гравировка, похоже, станет очень популярной в ближайшем будущем. Например, кто-то из производителя Universal Robots недавно упомянул, что подумывает добавить гравюру на дереве в свой постоянно растущий список приложений для совместных роботов.
Проект Госедоппа включал в себя программирование универсального робота и разработку специального концевого эффектора для гравировки, который мог удалять пыль.
Как обычно делается гравюра на дереве
Как и в случае со многими другими операциями механической обработки, традиционным способом автономной гравировки является использование специального станка с ЧПУ.
Эти машины легко найти, и на рынке есть много конкурирующих вариантов. Однако они, как правило, негибкие — каждая модель подходит только для одного конкретного типа гравировки. Если вы хотите перейти на другой процесс гравировки, возможно, вам придется купить совершенно другую машину.

Программирование гравировального станка с ЧПУ
Одна из проблем этого традиционного типа гравировки связана с программированием. Как говорит эксперт по ЧПУ Джеймс Гамильтон, «станок с ЧПУ хорош настолько, насколько хорош его программный продукт. И не все программное обеспечение одинаково». Он объясняет, что используемое вами программное обеспечение действительно может ограничивать возможности вашей машины.
Некоторое программное обеспечение ЧПУ, например, может выполнять только 2,5D-фрезерование. Это хорошо для гравировки, когда вы обычно хотите фрезеровать только двухмерную форму на поверхности материала. Однако если вы когда-нибудь захотите перейти к более трехмерным формам, это станет ограничением.
Госедопп использовал 2,5-мерную ротационную гравировку, которая включает в себя использование вращающегося фрезерного или фрезерного инструмента для прорезания тонких канавок в древесине.
Что такое роботизированная гравировка?
Подход, которого придерживался Ян Госедопп, заключался в том, чтобы полностью отказаться от использования станка с ЧПУ. Вместо этого он решил использовать робота, а именно UR10 от Universal Robots.
По сравнению со станками с ЧПУ роботы очень гибкие. На самом деле, один робот может использоваться практически для любого типа процессов гравировки… и, кроме того, для многих других задач. Все, что вам нужно сделать, это дать роботу другой инструмент, что очень легко сделать с помощью подходящего программного обеспечения для программирования роботов.
Программирование гравировки роботов
Для программирования Госедопп решил использовать RoboDK. Этот выбор помог ему избежать многих потенциальных проблем с программированием, возникающих на традиционных станках с ЧПУ.
С помощью специализированного мастера роботизированной фрезеровки RoboDK можно легко получить требуемую 2,5D-гравировку и при необходимости использовать 3D-фрезерование с точно такой же настройкой.
Для создания траектории гравировки он использовал Solid Works вместе с ее бесплатной надстройкой HSMXpress, которая создает траектории CAM. Когда он работал над этим проектом, панель инструментов RoboDK для SolidWorks, которую мы выпустили в этом году, еще не была доступна. Поэтому траектория фрезерования была импортирована в RoboDK с использованием файлов G-кода.
Специальный инструмент для гравировки без пыли
Одной из основных разработок Яна Госедоппа стал изготовленный на заказ концевой эффектор для роботизированной гравировки.
Интересной особенностью этого инструмента было то, что он включал в себя элементы для удаления пыли и стружки с заготовки во время работы, что позволяло обеспечить чистоту рабочей среды.

Важные факторы для робота-гравера
В рамках своей бакалаврской диссертации он оценил 2 различных конструкции концевых эффекторов и выбрал лучший из них, исходя из его пригодности для поставленной задачи.
Он оценил два своих проекта по следующим категориям:
- Совместимость с UR3/UR10
- Возможность зажима фрезерного шпинделя
- Совместимость с извлечением
- Точное центрирование и выравнивание
- Фрезерный шпиндель заподлицо с фланцем робота
- Боковые нити для фиксации
- Небольшой размер инструмента
- Низкие производственные затраты
Эти два дизайна были очень похожи и получили одинаковые оценки в большинстве этих категорий. Единственными двумя отличиями между конструкциями были способ крепления фрезерного шпинделя и расположение инструмента на фланце робота.
В конце концов, двумя факторами, которые определили его выбор конструкции, были более низкие производственные затраты и добавление боковой резьбы для дополнительных креплений.
Безопасность
Ключевой проблемой для этого типа инструментов является безопасность. Используемый робот был коллаборативным роботом, поэтому у него были свои функции безопасности. Однако пользовательские инструменты могут создавать дополнительные проблемы с безопасностью.
Gosedopp сосредоточился на двух аспектах безопасности:
- Опасность от летящих предметов — Древесная стружка и пыль могут легко разлететься в процессе гравировки и нанести вред человеку. Чтобы бороться с этим, он добавил к инструменту щетку для улавливания летящей стружки и пылесос для удаления пыли.
- Опасность входа людей в рабочую зону фрезерного шпинделя — Хотя сами коллаборативные роботы в целом безопасны, это не значит, что их инструменты безопасны. Вращающийся гравировальный инструмент может нанести ущерб человеку, если, например, его рука будет мешать. Кисть вокруг инструмента поможет избежать этого в некоторой степени. Однако Госедопп счел, что требуется дополнительная безопасность, поэтому добавил защитное стекло и лазерный сканер.
Окончательный дизайн
Оценив две конструкции, Госедопп пришел к окончательному варианту концевого эффектора для гравировки робота. Он содержал следующие компоненты:
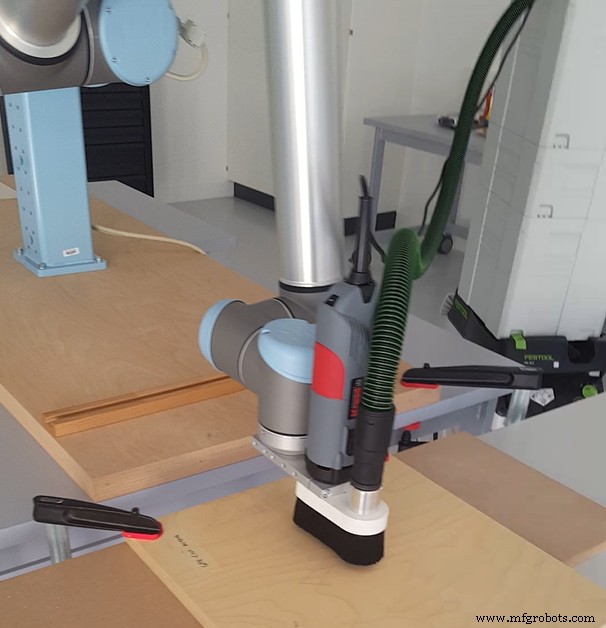
- Фрезерная головка — «деловой конец» инструмента для фрезерования заготовок.
- Робот-манипулятор — коллаборативный робот UR10.
- ПК — программа была сгенерирована в RoboDK и экспортирована в программу робота.
- Контроллер — выполнил обработку сигнала и запустил программу робота, созданную RoboDK.
- Вакуум — проведена уборка пыли и стружки.
- Система безопасности — использовался лазерный сканер для обнаружения проникновения кого-либо в рабочее пространство и остановки робота.
Наконец, Gosedopp удалось создать следующее приложение для гравировки по дереву, как показано в этом видео:
Что можно сделать с беспыльным гравировальным роботом? Сообщите нам в комментариях ниже или присоединитесь к обсуждению ЛинкедИн , Твиттер , Фейсбук Инстаграм или в Форум RoboDK .
Промышленный робот
- Как обучение с подкреплением может однажды изменить работу промышленного робота
- Лазерная гравировка с роботом Arduino SCARA своими руками
- Бесплатное обучение роботов с RoboDK
- Роботизированное бурение 101:как развернуть систему роботизированного бурения
- Повысьте уровень производства роботов с помощью плагина Inventor
- Как Голливуд делает потрясающий реквизит с помощью роботизированного фрезерования
- RoboDK отмечает 5 лет успешной эволюции
- Как убедить руководство согласиться на роботизированную обработку
- Как начать программирование роботов Yaskawa
- Как начать работу с RoboDK для Raspberry Pi