


Что, черт возьми, такое самопрограммирующийся робот?
Когда мы думаем о том, как совместить ИИ, автономное функционирование и робототехнику, Голливуд и умные сценаристы убеждают нас, что будущее окажется где-то между «Терминатором» и «Ней». Хотя полет фантазии необходим, чтобы жизнь оставалась интересной, дело в том, что роботы, которые могут работать автономно, будут просто слишком полезны, чтобы захватить мир. На самом деле они будут выполнять давно необходимые роли, которые в конечном итоге дадут нам больше свободы, чем мы когда-либо знали.
Согласно MIT, автономные роботы «представляют собой интеллектуальные машины, способные выполнять задачи в мире самостоятельно, без явного человеческого контроля». В этом контексте мы знаем, что человеческий контроль является ограничителем, но каковы ограничения?
Чтобы достичь автономности робота, первое ограничение, которое робот должен преодолеть, - это способность программировать себя - способность принимать поставленные перед ним цели и находить способ их достижения без ручного вмешательства человека.
Следующие шаги к автономности роботов, как оказалось, намного качественнее. Именно в этих качествах - будь то предоставляемая услуга, выполняемый процесс или генерируемые данные - действительно воплощается в жизнь идея автономности роботов.
Программирование роботов утомительно, утомительно, ужасно
По правде говоря, роботы сегодня вообще очень «тупые». Конечно, это не эпитет - учитывая то, чего они могут достичь при правильном программировании, они представляют собой невероятно мощные решения. Каждая робототехническая компания работает над тем, чтобы упростить использование продаваемых ими роботов, и хотя некоторые стартапы робототехники работают над тем же самым над существующим оборудованием, каждая отдельная компания в этой области надеется, что однажды роботы смогут программировать самих себя.
Почему это общая цель индустрии робототехники? Поскольку программирование роботов - чрезвычайно утомительный процесс, он часто требует значительного бюджета в рамках любой интеграции робототехники. Для тех, кто не знаком с процессом, программирование роботов - хотя и увлекательное занятие для многих профессионалов - болезненно, поскольку оно часто влечет за собой до 6 степеней свободы, десятки потенциальных траекторий движения инструмента и конечных положений, а также множество кинематические ограничения, требующие тщательного рассмотрения для создания наиболее эффективной программы движения робота.
В то же время этот процесс создания движения должен выполняться вручную для каждой части и среды, в которой должен работать робот. Это означает, что до сегодняшнего дня роботы были практичны для компаний в таких отраслях, как транспорт и потребительские товары. электроника, но непрактична (за исключением специализированных приложений) для большинства компаний, которые не выпускают десятки тысяч дорогих SKU в год, с ограниченным разнообразием товаров.
Именно здесь возможности самопрограммирования могут изменить правила игры для обрабатывающей промышленности. Большая часть затрат, связанных с использованием робота, связана с его программированием и последующим структурированием производственного пространства для удовлетворения его потребностей. Сводя программирование к чему-то, что можно автоматизировать, можно позволить роботам адаптироваться как к частям, так и к окружающей среде. Это означает, что роботы, наконец, могут использоваться всеми производителями, независимо от состава компонентов или артикулов.
Что нужно для достижения «самопрограммирования»?
За прошедшие годы (и десятилетия) были введены различные решения, упрощающие программирование роботов. Обучающие подвески, кинематические инструкции и автономное программирование - все это способы, с помощью которых поставщики робототехники упростили этот процесс и сделали его более полезным для инженеров, программистов и интеграторов.
В конечном итоге все это может автоматизировать некоторые элементы процесса или, по крайней мере, сделать их более интуитивно понятными, но для создания и проверки каждого полного движения по-прежнему требуются часы, дни или даже недели, и все это, конечно же, в строго структурированной среде.

Чтобы понять, что нужно роботу для создания собственного движения, нужно подумать о том, что может сделать роботов более похожими на нас. Не вдаваясь в философию, мы, люди, полагаемся на свои чувства, чтобы узнать почти все, что мы знаем. В то же время наши чувства - это то, что позволяет нам интерпретировать окружающую среду и реагировать на нее - большая часть этого происходит бессознательно, рефлексивно, инстинктивно или даже усваивается с возрастом.
Наделить роботов необходимыми чувствами, чтобы затем отреагировать к их среде - способность интерпретировать трехмерное пространство и, в частности, текстуры - позволила бы им собрать информацию, необходимую для программирования себя для достижения цели.
Самопрограммируемый робот может быть создан с помощью правильного набора алгоритмов, но для чего? Настоящая проблема здесь заключается в том, чтобы позволить роботу запрограммировать себя на достижение условно достижимой цели - использовать ту же способность человека, чтобы эффективно программировать робота с помощью существующих инструментов, и сделать это автоматическим процессом.
Процесс распыления

Как это произошло? Если взять пример процесса распыления, основная потребность для достижения качественного результата - это, проще говоря, способность идентифицировать и интерпретировать деталь в пространстве. Зная это, обладая правильными способностями к созданию программы, робот может затем достичь цели - покрыть поверхность покрытием (или распылить его с помощью теплового пистолета или абразивных материалов).
Как правило, эта точность должна быть снижена до одного миллиметра или меньше, чтобы достичь такой же остроты зрения, как у людей во время рабочего процесса. К счастью, это уровень точности, достижимый с помощью инфракрасных датчиков, которые при объединении нескольких углов и положений могут предоставить информацию, необходимую для визуализации цифрового двойника объекта в трехмерном пространстве.
Таким образом, такая возможность позволяет компаниям автоматизировать задачи, которые считались утомительными и даже опасными для людей. Тратить 40 часов в неделю, 50 недель в год в течение 30 или 40 лет на распыление и нанесение покрытий на промышленные детали - не лучшее, что вы можете сделать - будь то для вашего здоровья или психики, - в то время как добавление робота приносит материальные выгоды, которые облегчают выполнение других работ. и делать больше удовольствия.
По сравнению с традиционным программированием роботов, преимуществ даже близко нет. В большинстве операций по нанесению покрытий требуется большое количество деталей, требующих доработки - будь то в определенный день или в рамках производственного цикла. Многие производители в этих условиях пытались использовать роботов, но безуспешно, а производители автомобилей, как правило, сегодня составляют подавляющее большинство пользователей покрасочных роботов. Однако с самопрограммируемыми роботами эта поломка резко изменится.

Что будет дальше после осмысления?
Теперь, когда вы понимаете цели, которых может достичь самопрограммирующийся робот, важно понимать, что входит в процесс от начала до конца. После создания ощущения окружающей среды самопрограммирующийся робот должен обработать все стандартные требования промышленного робота с дополнительной необходимостью понимания уникальные характеристики процесса или ячейки. Это может быть знание процесса (например, где мне сделать шаг, чтобы уйти с дороги или какой узор использовать для нанесения краски на поверхность), или конкретные инструкции, вводимые через базовый интерфейс программного обеспечения, чтобы обеспечить приоритетность точных целей в области качества - все, по-прежнему, конечно, без необходимости программирования.
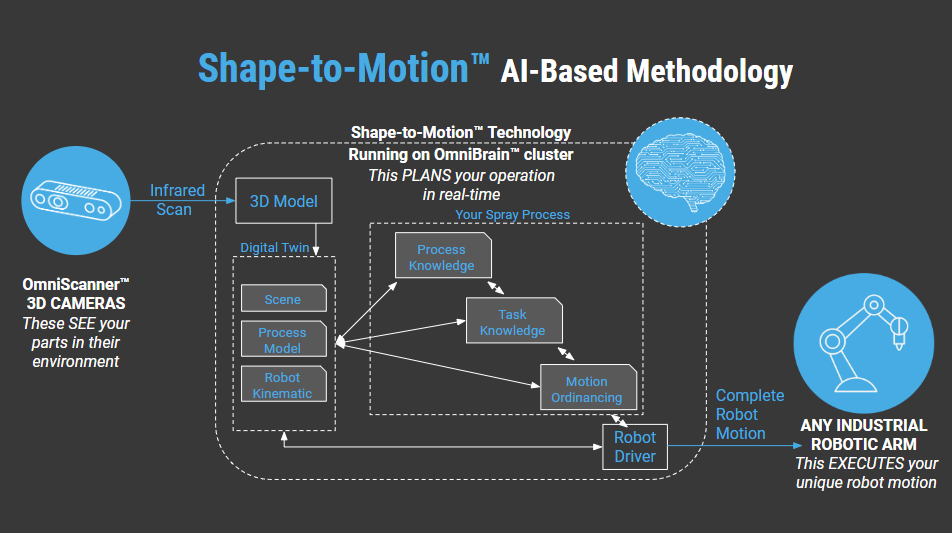
Ниже приведен лишь один пример того, как организован процесс самопрограммирования. Технология Shape-to-Motion ™ компании Omnirobotic использует 3D-камеры для последующего восстановления 3D-модели клетки. Будучи подключенным к контроллерам процесса в заводских настройках, а также зная о положении и ограничениях самого робота в пространстве, робот может затем использовать знания о процессе, разбивку задач и упорядочивание движения, чтобы участвовать в процессе параллельного планирования задач. Каждый результат оценивается в среде цифрового двойника, что затем приводит к наиболее оптимальному результату - иногда на основе более 10 000 сценариев на операцию.
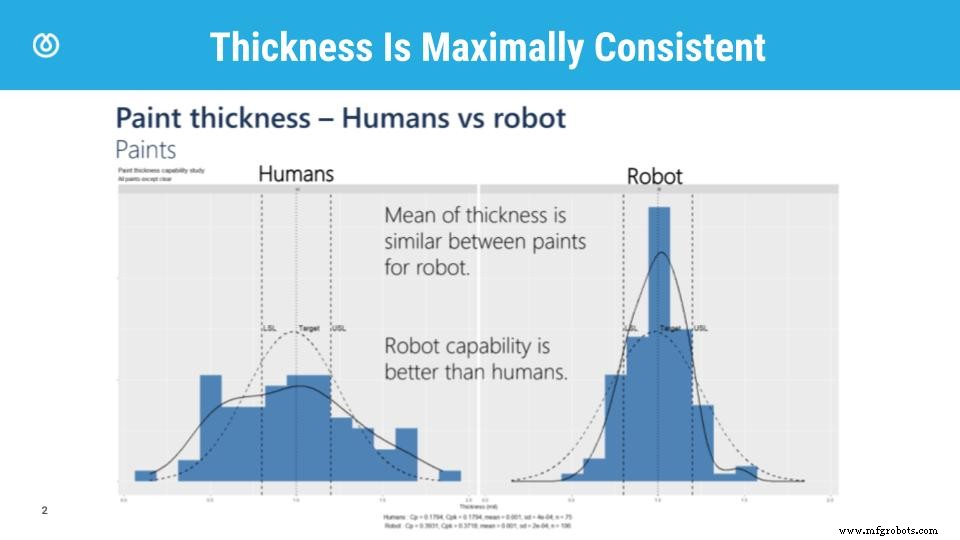
Используя эту способность приоритизировать задачи, робот может эффективно генерировать для себя серию движений, которые составляют законченный процесс. Поскольку роботы по своей природе более последовательны, предсказуемы и могут работать дольше людей (что, конечно, и следует ожидать от машин), конечный результат самопрограммируемого робота намного более согласован, чем любое существующее решение.
Если вы что-то делаете, у вас должна быть цель
ИИ может заменить некоторые рабочие места, но в этом процессе автоматизации дорогостоящих узких мест во всех наших производственных и рабочих процессах они фактически создадут спрос на более творческие, инновационные и интуитивно понятные рабочие места со стороны людей. Хотя в один прекрасный день может появиться способ автоматизировать эти уникальные человеческие качества, зачем нам это нужно? И, конечно же, были бы мы, потребители, так же заинтересованы в «творчестве», производимом машиной?
Конечно, технология самопрограммирования дает нам такой же толчок в воображении, как и хороший фильм, но важно зацикливаться на практических и рентабельных преимуществах любой технологии. Существует очевидная потребность в более эффективных и действенных производственных процессах, и нехватка квалифицированной рабочей силы сохраняется - даже в разгар рекордной безработицы.
Дело в том, что использование большего количества роботов - лучший способ вернуть людей к работе. Как спросите вы? По мере того, как вы создаете большую производительность (и, следовательно, прибыльность), это позволяет фактически создавать новые рабочие места, повышать заработную плату и большему количеству членов данной компании или общества извлекать выгоду из плодов своего труда. Если вы хотите узнать больше о том, почему роботы станут настолько необходимыми как для бизнеса, так и для общества в будущем, ознакомьтесь с этим замечательным докладом Robo Busines Direct знаменитого робототехника Родни Брукса.
И, конечно же, если вы хотите понять, как технология самопрограммирования уже может принести пользу сегодняшним процессам распыления, не стесняйтесь посетить наш основной веб-сайт.
Omnirobotic - единственный поставщик самопрограммируемой автономной робототехники для процессов отделки распылением с большим количеством компонентов. Если вы хотите понять уникальные преимущества самопрограммируемых роботов для промышленных производств, свяжитесь с нами по адресу [email protected] или воспользуйтесь нашим калькулятором окупаемости.
Промышленный робот
- Что может и что не может автономный робот
- В чем реальная разница между автономным роботом и HMI?
- Понимание влияния роботов на денежный поток
- Какова реальность видения роботов?
- Как занять роботов
- Шарнирно-сочлененные роботы:руководство по самому знакомому промышленному роботу
- Что делает программное обеспечение для моделирования роботов лучшим в мире?
- Каковы преимущества промышленного робота?
- Какие рабочие места создали роботы?
- COBOTS Vs. Промышленные роботы:в чем разница?