Код
hydra.ino Arduino
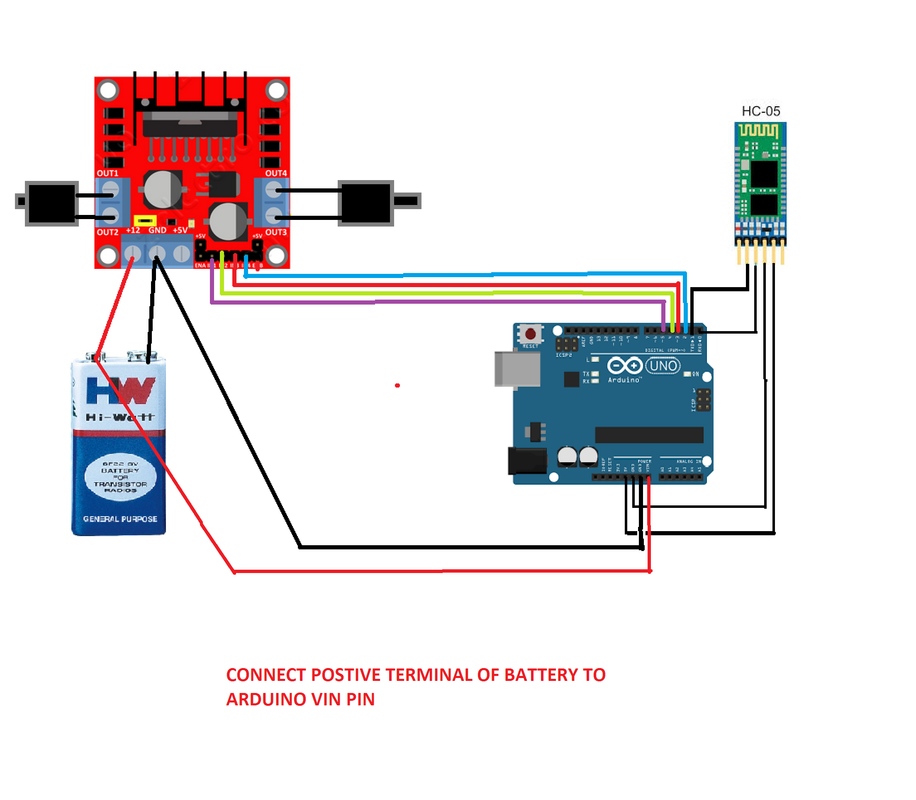
// 1-й и 2-й драйверы двигателя предназначены для управления ARM // 3-й драйвер двигателя предназначен для ЛОКОМОТИВНОЙ части // 1-й драйвер двигателя [BASE (2,3) AND SHOULDER (4,7)] int m1IN1 =2; // in1int m1IN2 =3; // in2int m1IN3 =4; // in3int m1IN4 =5; // in4int m1ENA =6; // для управления скоростью здесь не используется управление скоростью, поэтому поддерживайте ВЫСОКИЙ уровень во время движения и НИЗКИЙ для остановки двигателя int m1ENB =7; // для управления скоростью здесь не используется управление скоростью, поэтому поддерживайте ВЫСОКИЙ уровень во время движения и НИЗКИЙ для остановки двигателя // Драйвер 2-го двигателя [КОЛЕНО (8,9) И ЗАЖИМ (12,13)] int m2IN1 =8; // in1int m2IN2 =9; // in2int m2IN3 =10; // in3int m2IN4 =11; // in4int m2ENA =12; // для управления скоростью здесь не используется управление скоростью, поэтому поддерживайте ВЫСОКИЙ уровень во время движения и НИЗКИЙ для остановки двигателя int m2ENB =13; // для управления скоростью здесь не используется управление скоростью, поэтому поддерживайте ВЫСОКИЙ уровень во время движения и НИЗКИЙ для остановки двигателя // Драйвер третьего двигателя [CAR (INI, IN2) =RIGHT (IN3, IN4) =LEFT] int m3IN1 =14; // in1 14- вывод A0 на arduinoint m3IN2 =15; // in2 15-A1int m3IN3 =16; // in3 16-A2int m3IN4 =17; // in4 17-A3int m3ENA =18; // ena 18-A4, здесь вы можете использовать контроль скорости для управления скоростью части локомотива, для этого вы должны использовать analogWrite () вместо digitalWrite () int m3ENB =19; // enb 19-A5, здесь вы можете использовать контроль скорости для управления скоростью части локомотива, для этого вам нужно использовать analogWrite () вместо digitalWrite () void setup () {pinMode (m1IN1, OUTPUT); pinMode (m1IN2, ВЫХОД); pinMode (m1IN3, ВЫХОД); pinMode (m1IN4, ВЫХОД); pinMode (m2IN1, ВЫХОД); pinMode (m2IN2, ВЫХОД); pinMode (m2IN3, ВЫХОД); pinMode (m2IN4, ВЫХОД); pinMode (m1ENA, ВЫХОД); pinMode (m1ENB, ВЫХОД); pinMode (m2ENA, ВЫХОД); pinMode (m2ENB, ВЫХОД); pinMode (m3IN1, ВЫХОД); pinMode (m3IN2, ВЫХОД); pinMode (m3IN3, ВЫХОД); pinMode (m3IN4, ВЫХОД); pinMode (m3ENA, ВЫХОД); pinMode (m3ENB, ВЫХОД); Serial.begin (9600);} недействительный цикл () {char ip ='0'; while (Serial.available ()> 0) // проверяем, получает ли последовательный порт какое-либо значение от hc05 или нет {ip =Serial.read (); // считывает данные из последовательного порта delay (10); } switch (ip) {case '6':// ДОЛЖЕН ВВЕРХ digitalWrite (m1IN3, HIGH); digitalWrite (m1IN4, LOW); digitalWrite (m1ENA, HIGH); digitalWrite (m1ENB, HIGH); ломать; case '5':// ВНИЗ digitalWrite (m1IN3, LOW); digitalWrite (m1IN4, ВЫСОКИЙ); digitalWrite (m1ENA, HIGH); digitalWrite (m1ENB, HIGH); ломать; case '1':// ЛОТОК ВВЕРХ digitalWrite (m2IN3, HIGH); digitalWrite (m2IN4, LOW); digitalWrite (m2ENA, HIGH); digitalWrite (m2ENB, HIGH); ломать; case '2':// ЛОТОК ВНИЗ digitalWrite (m2IN3, LOW); digitalWrite (m2IN4, ВЫСОКИЙ); digitalWrite (m2ENA, HIGH); digitalWrite (m2ENB, HIGH); ломать; case '8':// GRIP CONTRACT digitalWrite (m2IN1, HIGH); digitalWrite (m2IN2, LOW); digitalWrite (m2ENA, HIGH); digitalWrite (m2ENB, HIGH); ломать; case '7':// GRIP EXPAND digitalWrite (m2IN1, LOW); digitalWrite (m2IN2, ВЫСОКИЙ); digitalWrite (m2ENA, HIGH); digitalWrite (m2ENB, HIGH); ломать; case '3':// БАЗОВЫЕ ЧАСЫ digitalWrite (m1IN1, HIGH); digitalWrite (m1IN2, LOW); digitalWrite (m1ENA, HIGH); digitalWrite (m1ENB, HIGH); ломать; case '4':// БАЗОВАЯ БЛОКИРОВКА digitalWrite (m1IN1, LOW); digitalWrite (m1IN2, ВЫСОКИЙ); digitalWrite (m1ENA, HIGH); digitalWrite (m1ENB, HIGH); ломать; case '9':// ВЫКЛ. digitalWrite (m1IN1, LOW); digitalWrite (m1IN2, LOW); digitalWrite (m1IN3, LOW); digitalWrite (m1IN4, LOW); digitalWrite (m1ENA, LOW); digitalWrite (m1ENB, LOW); digitalWrite (m2IN1, LOW); digitalWrite (m2IN2, LOW); digitalWrite (m2IN3, LOW); digitalWrite (m2IN4, LOW); digitalWrite (m2ENA, LOW); digitalWrite (m2ENB, LOW); digitalWrite (m3IN1, LOW); digitalWrite (m3IN2, LOW); digitalWrite (m3IN3, LOW); digitalWrite (m3IN4, LOW); digitalWrite (m3ENA, LOW); digitalWrite (m3ENB, LOW); ломать; case 'A':// ВПЕРЕД digitalWrite (m3IN1, HIGH); digitalWrite (m3IN2, LOW); digitalWrite (m3IN3, HIGH); digitalWrite (m3IN4, LOW); digitalWrite (m3ENA, HIGH); digitalWrite (m3ENB, HIGH); ломать; case 'D':// НАЗАД digitalWrite (m3IN1, LOW); digitalWrite (m3IN2, HIGH); digitalWrite (m3IN3, LOW); digitalWrite (m3IN4, HIGH); digitalWrite (m3ENA, HIGH); digitalWrite (m3ENB, HIGH); ломать; case 'B':// ПРАВИЛЬНО digitalWrite (m3IN1, LOW); digitalWrite (m3IN2, HIGH); digitalWrite (m3IN3, HIGH); digitalWrite (m3IN4, LOW); digitalWrite (m3ENA, HIGH); digitalWrite (m3ENB, HIGH); ломать; case 'C':// ЛЕВЫЙ digitalWrite (m3IN1, HIGH); digitalWrite (m3IN2, LOW); digitalWrite (m3IN3, LOW); digitalWrite (m3IN4, HIGH); digitalWrite (m3ENA, HIGH); digitalWrite (m3ENB, HIGH); ломать; }} 






 закрепите гайку на поршне шприца с помощью m-seal.
закрепите гайку на поршне шприца с помощью m-seal.  зафиксируйте шприц и мотор таким образом
зафиксируйте шприц и мотор таким образом 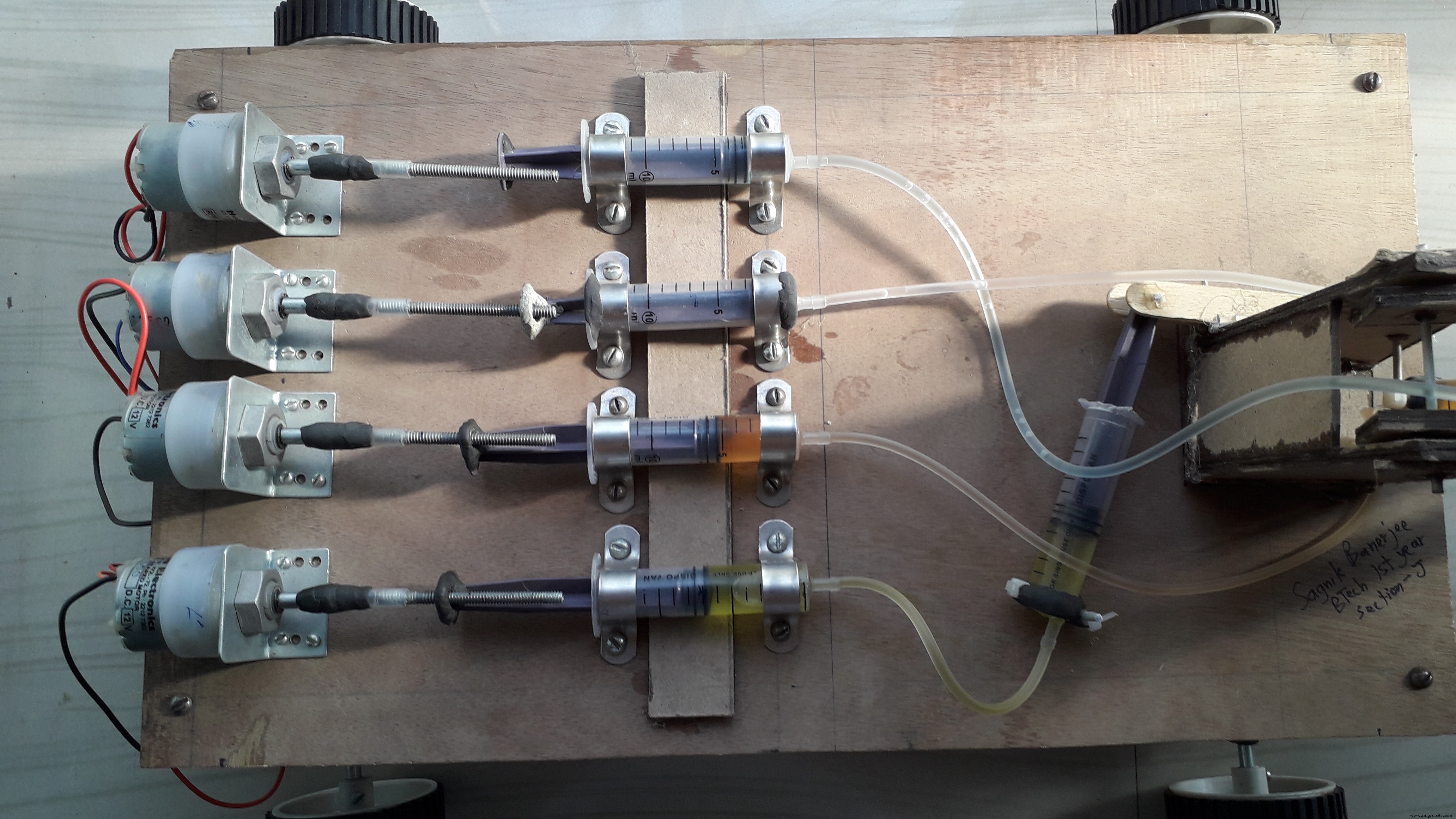 когда двигатель вращается по часовой стрелке, он толкает поршень, а когда он вращается против часовой стрелки, он тянет поршень
когда двигатель вращается по часовой стрелке, он толкает поршень, а когда он вращается против часовой стрелки, он тянет поршень  https://www.youtube.com/watch?v=lhOF6cViZ4Q
https://www.youtube.com/watch?v=lhOF6cViZ4Q 