


Конечная таблица ЧПУ Zen Garden
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Приложения и онлайн-сервисы
 |
|
Об этом проекте
Я макр. Я сижу ночью перед телевизором со своей семьей с молескином или другим блокнотом для моих проектов и набросками. Многие из моих разговоров относятся к типу «не было бы круто, если бы _______». Многие из моих идей никогда не сходят со страниц моих проектов. Этот сделал. Я считаю, что это круто. Это закрытый дзен-сад, встроенный в торцевой столик. Движение было вдохновлено ЧПУ или 3D-принтером, и на самом деле я начал использовать пандусы 1.4 (щит Arduino для 3D-принтера), пока я не придумал гораздо более простой способ его построить.
Я хотел, чтобы конечный продукт олицетворял миролюбие. Я хотел привнести немного дзен в свою гостиную. Думаю, да.
Многие вещи, которые я создаю, просто не красивы. В процессе строительства я так и не объяснил своей жене, что именно строил. Просто это была бы мебель, которая была бы достаточно красивой, чтобы она могла быть в нашем доме. Чтобы поместить это в контекст, вы должны знать, что я делюсь всем со своей женой. Она-моя лучшая подруга. Но в этом проекте я просто пообещал ей, что конечный результат будет тем, чем она будет гордиться в своей гостиной. Она знала, что это конец стола, но на этом все. Так что я очень усердно работала, чтобы этот столик выглядел по-настоящему хорошо для нее.
Я построил 3D-принтеры. Я также построил простую мебель (книжные полки, скамейки и т. Д.), Но я никогда не строил ничего, что объединяло бы технологии в мебель. Так что я действительно подумал, что это будет интересный проект.
Первоначальная идея этого стола возникла у меня около шести месяцев назад. Конкурс «Столы и парты» (и все эти прекрасные черно-желтые инструменты в качестве призов) вдохновил меня на начало этого проекта.
Шаг 1. Дизайн и идея
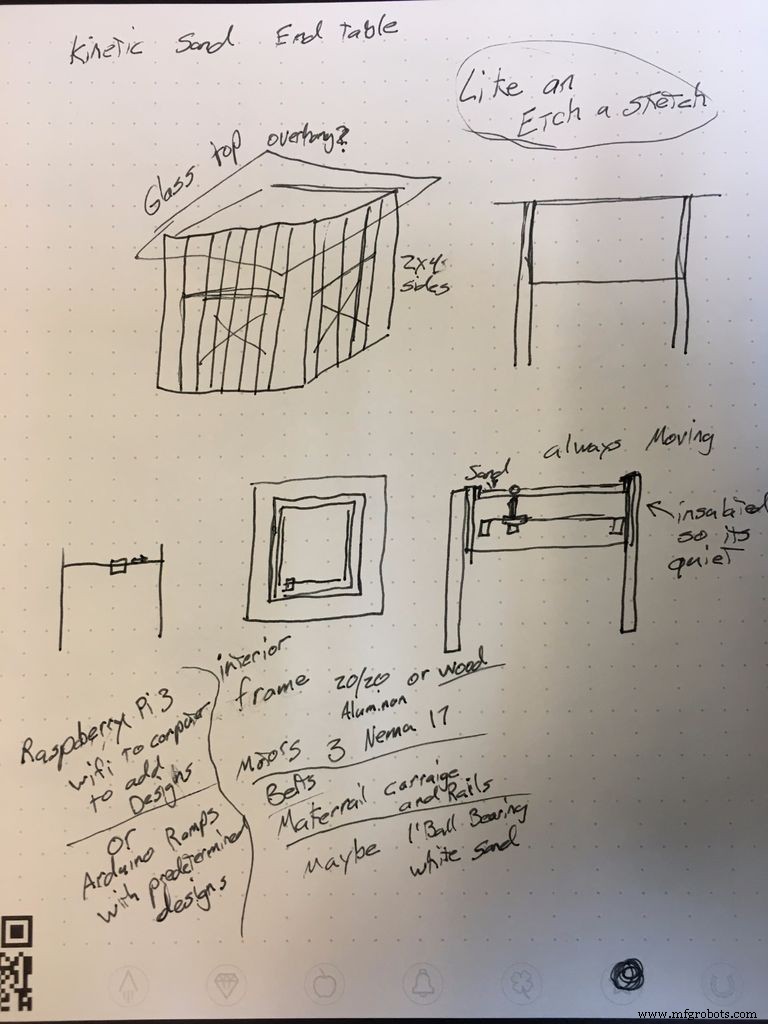
Я хотел соорудить торцевой столик, что-то, что могло бы сидеть отдельно или рядом с диваном, может быть, с лампой. Я хотел, чтобы это было больше «искусство», чем что-либо другое, вливание технологий в дерево. Я всегда вижу альпинарии с деревянными граблями, мне всегда казалось, что они очень мирные. Это действительно то, к чему я стремился в этой сборке, мирное искусство, наполненное технологиями.
Для этого я подумал об использовании портала, похожего на 3D-принтер, без оси z. Таким образом, я мог управлять шарикоподшипником с помощью магнитов через какую-то среду, возможно, песок. Я также думал о том, чтобы запрограммировать его для «печати» картинок или дизайна отдельно.
Думаю, я собираюсь использовать Arduino с двумя драйверами шагового двигателя и довольно простым кодом. Вместо того, чтобы программировать заданное пространство в коде, я просто установил концевой упор на минимуме и максимуме для обеих осей, поэтому 0,0 запускает остановку двигателя, а XXX, XXX max запускает остановку двигателя. Это значительно упростит программирование.
Шаг 2. Необходимые детали и материалы


Хорошо, это список деталей, которые я использовал. Это не означает, что вы должны использовать одни и те же детали, я просто хочу дать вам общее представление о деталях, которые я использовал для этого.
- Дерево. Я в основном пошел к своему деревянному мусорному ведру и нашел несколько полноприводных автомобилей, которые я спас из домика на дереве, и несколько избранных сосен, которые моя жена купила для отделки окон (пообещал ей, что я куплю ей больше). Я собрал все большие куски дерева, которые смог найти, и принес их в свой магазин. Я также использовал 1/4 березовой фанеры, которую купил у Menards несколько лет назад для другого проекта.
- 1/8 МДФ. Я использовал его между верхом и основанием, просто чтобы на верхушку было что-то приклеить. Оглядываясь назад, я, вероятно, мог бы пропустить это, и если бы я сделал это снова, я бы сделал это.
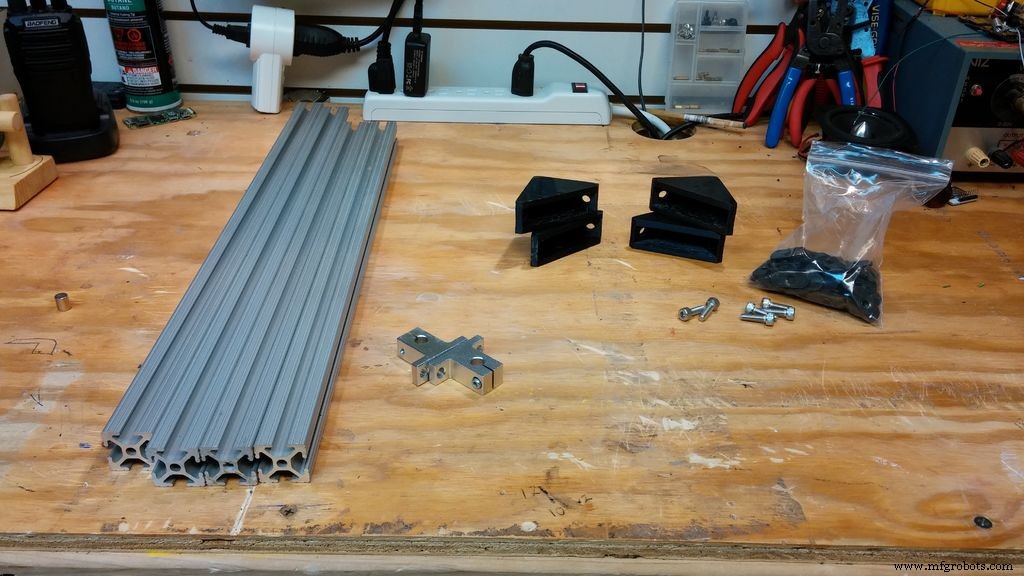
- Экструзия алюминия 2020. Я использовал это при построении каркаса портала.
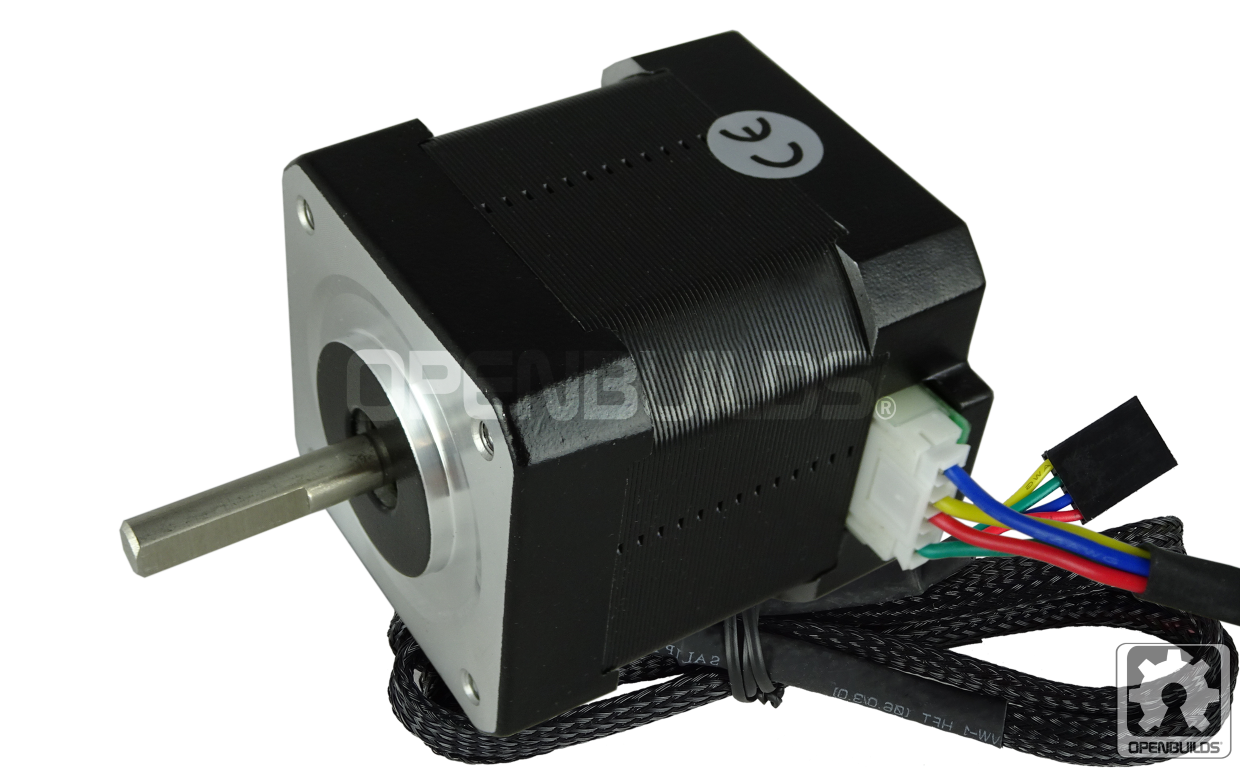
- 2 шаговых двигателя 12,99 долл. США за две оси движения.
- Arduino UNO используется для движения портала.
- Модуль джойстика Arduino UNO, используемый для управления движением.
- Гладкий стержень линейного перемещения 8 мм x 4
- 8-миллиметровая направляющая линейного вала x 8
- Детали для 3D-принтеров Раньше я построил много 3D-принтеров, и многие из них есть под рукой. В итоге я использовал ремни, гладкие стержни, гладкие стержневые подшипники и другие детали для 3D-принтера.
- Приспособление для отверстий в кармане Kreg Это не является абсолютно необходимым, но значительно упрощает сборку любой мебели. В этом проекте я использовал его сверху и прикрепил верх к основанию.
- Листовое стекло 1/4 дюйма --- Местный магазин стекла и красок. Обратите внимание, что это не безопасное стекло, и в случае его разбития могут образоваться опасно острые осколки, но для этого проекта мне нужны были прочность и толщина.
- Белая светодиодная лента и радиочастотный пульт
- Преобразователь напряжения LM317
- A4988 Драйвер шагового двигателя x 2
- 2 конденсатора 220 мФ 16 В
- Источник питания 12 В, 5 А
- Шарикоподшипник 3/4 дюйма.
- 25 фунтов белого игрового песка
- 2 мешка гладких речных камней.
- Неодимовый магнит с круглым основанием
- Макетирование макета
- Макетная плата для припоя Permaboard
- Несколько пластиковых хомутов с двумя отверстиями для кабелепровода или другой способ крепления портала к люку.
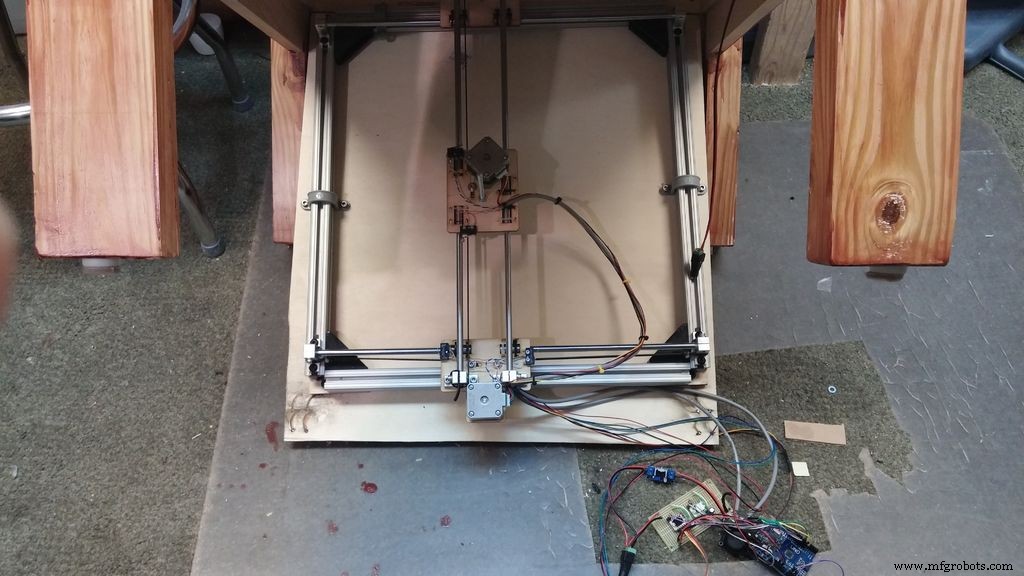
Шаг 3. Сборка портала
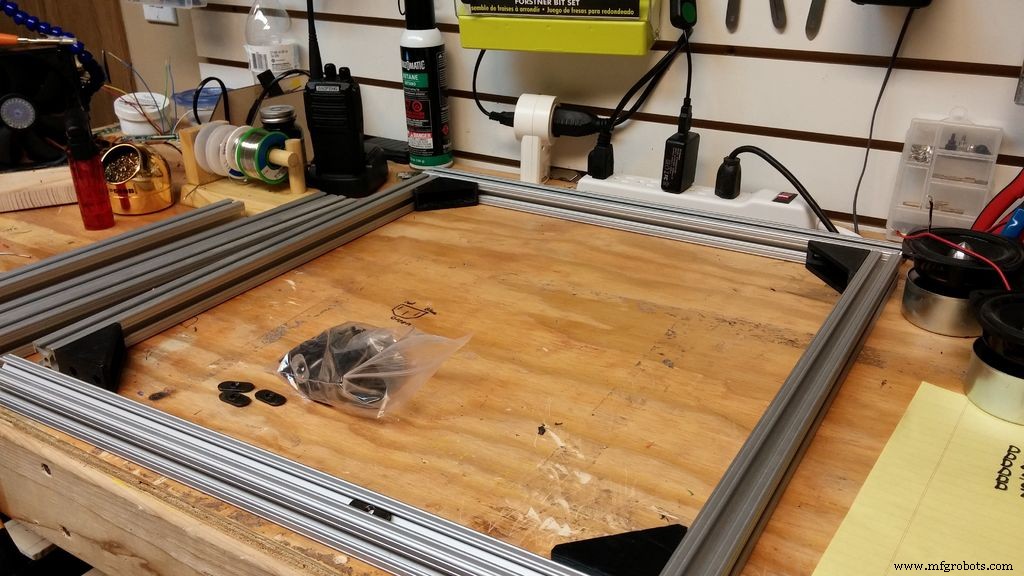


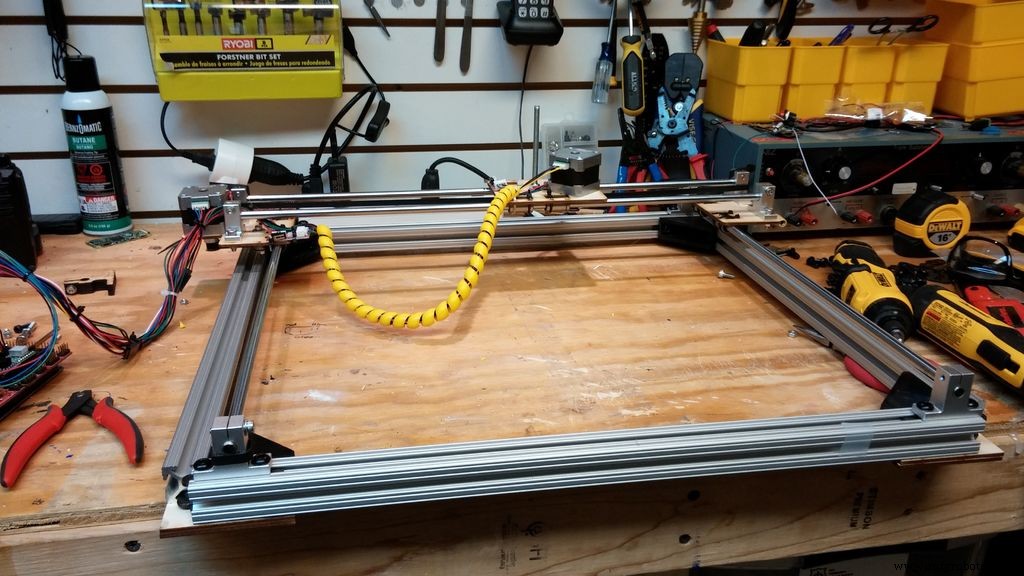
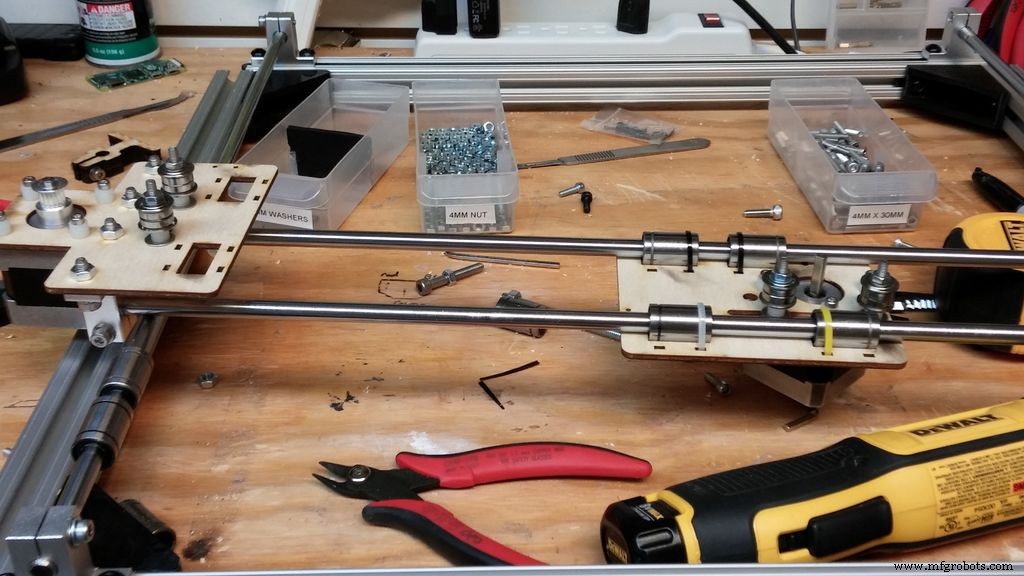
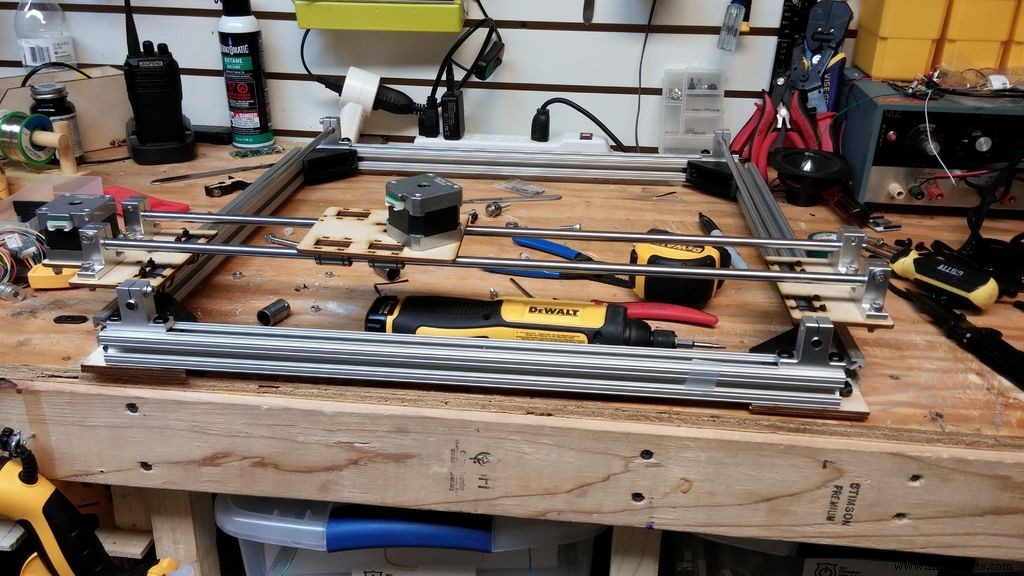
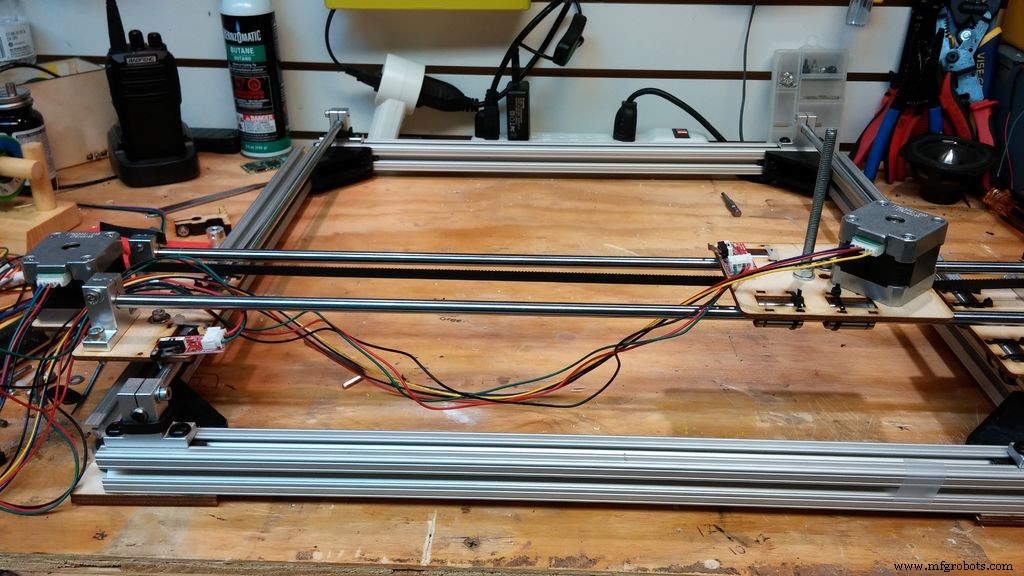
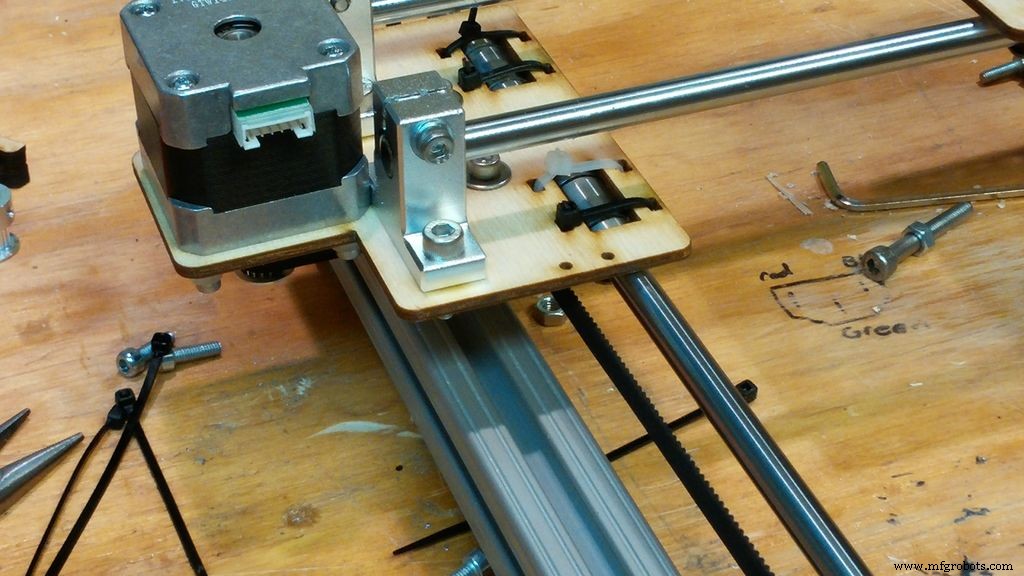
Я начал с грубых чертежей и построил портал. Возможно, это не самый эффективный способ построить это. Я сделал это именно так, имея в виду, что я пытался использовать части, оставшиеся от других сборок и тому подобное. У меня осталось немного алюминиевого профиля 20/20, оставшегося от другой сборки, поэтому я использовал его для рамы моего портала. Я спроектировал и напечатал на 3D-принтере угловые скобки и включил файлы для них здесь.
Я также включил вырезанные лазером детали для осей x и y. Внимательно изучите изображения, чтобы увидеть, как именно я собрал каретку и отдельные оси. Способ, которым я собрал каретку, возможно, не лучший способ, так как есть много разных способов построить портал, но я использовал этот метод с несколькими другими сборками, и, похоже, он отлично работает с хорошей надежностью.
FTY8AKAIVO3T4X1.dxf FZUAWWRIVO3T4WZ.cdr FVXPPAIIVO3T86T.stl
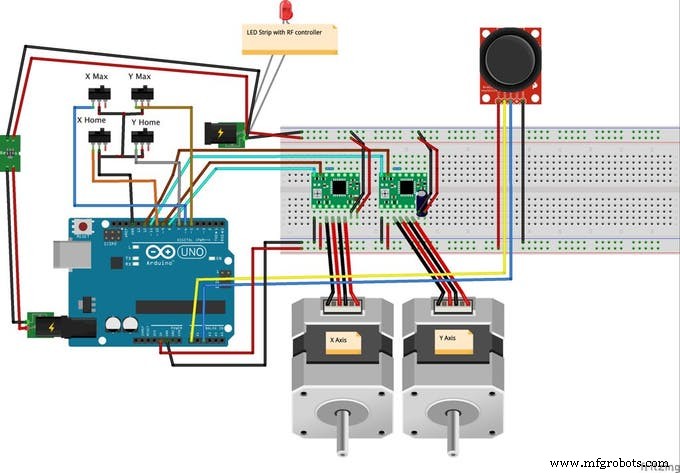
Шаг 4. Соберите схему
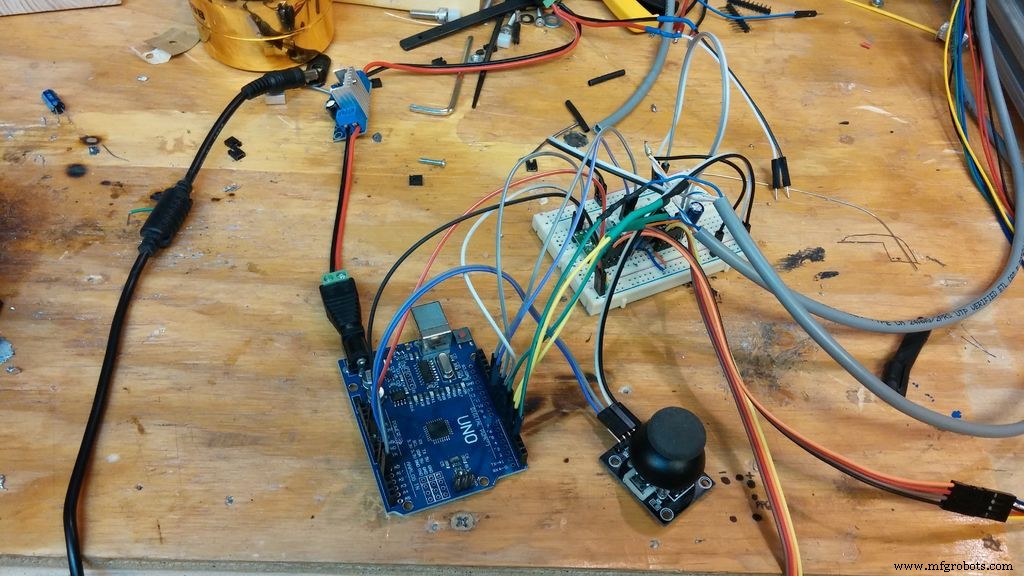
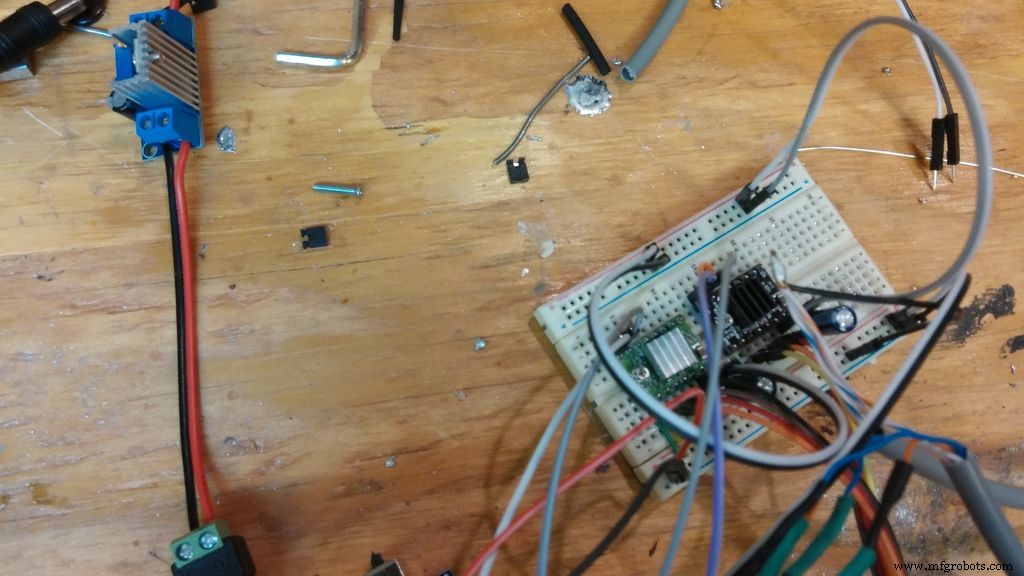

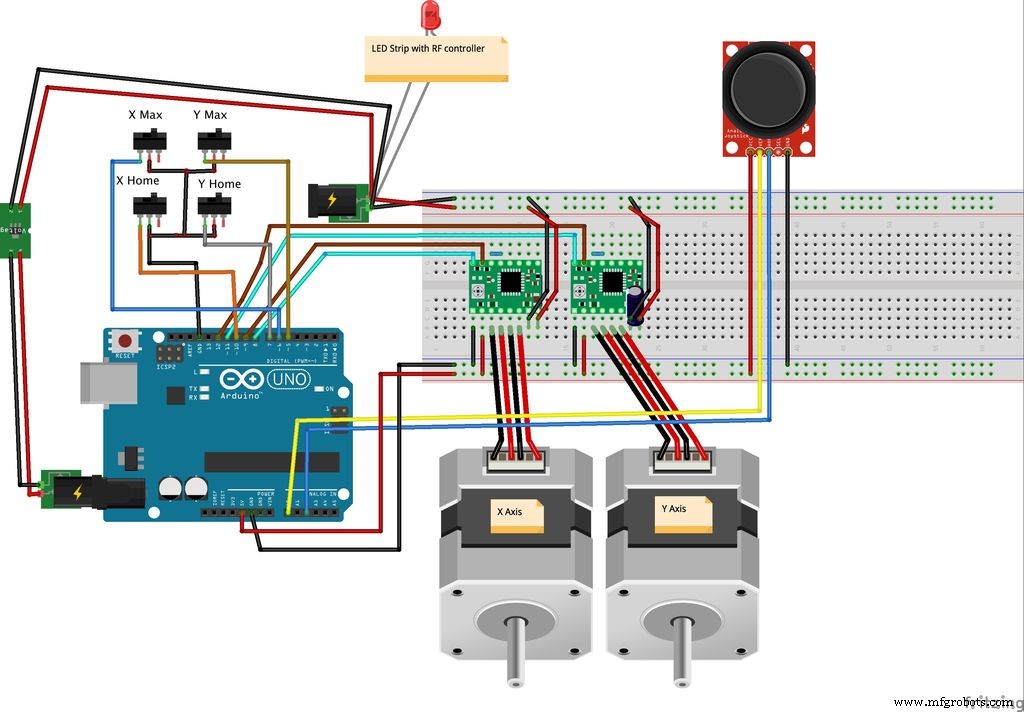
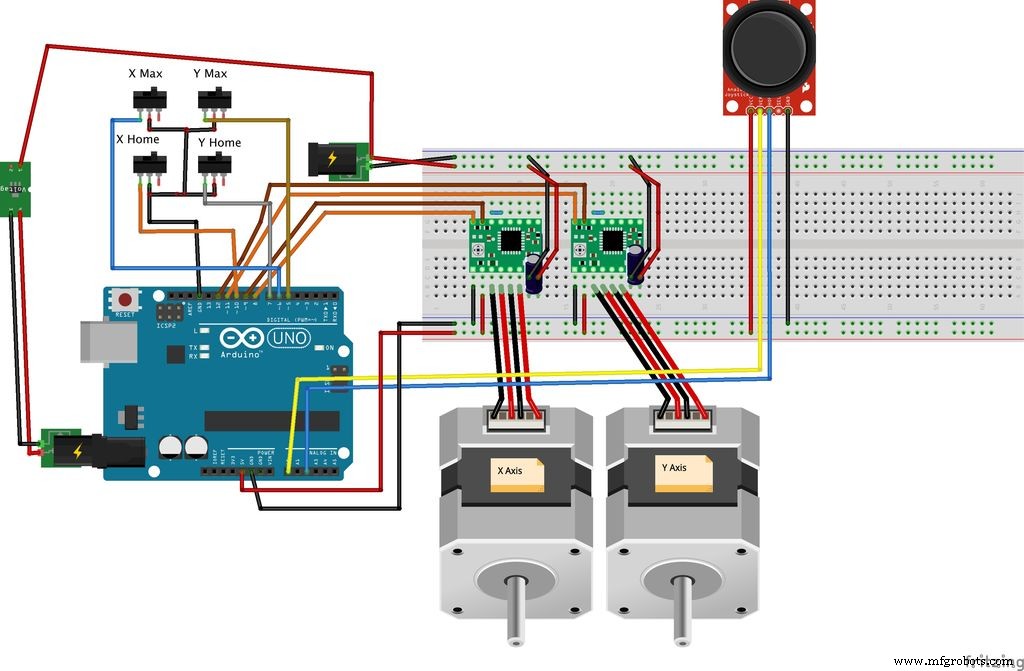
Первым делом я собрал схему на макетной плате, и когда я был уверен, что все работает так, как я хотел, я перенес ее на плату для пайки. Я включил приведенную выше диаграмму фритзинга, чтобы облегчить сборку.
Шаг 5. Код
Код, который мы сделали для этого, действительно прост. Я устанавливаю конечные положения как для минимального, так и для максимального значения как для оси X, так и для оси Y, поэтому в коде нет ничего, что определяло бы размер гентри. Поскольку размер не задан в коде, не имеет значения, больше ли ваш дизайн, чем мой. В коде ничего настраивать не нужно. Код находится здесь в формате .TXT и .INO, поэтому вы можете его скачать.
F5577MZIW6PMIF4.cpp FKOB89KIW6PMIF6.h FO9WJRBIW6PMIFY.ino F1K7N72IW6PMIGQ.zip FVI0A1ZIW6PMIGS.txt F9BIZS5IW6PMIGV.txt FGBWKEAIW6PMIGW.txt
Шаг 6. Проверка движения
После установки кода я тщательно его протестировал. Я хотел, чтобы диагональное движение было горизонтальным, затем вертикальным, а затем горизонтальным, как в этч-эскизе. Вроде хорошо работает. Итак, теперь я собираюсь припаять все соединения к Arduino, чтобы сделать его постоянным, и посмотрю, как установить его в таблицу.
Шаг 7. Фактическая часть таблицы
Итак, я начал пытаться решить, как я собираюсь построить то, что было у меня в голове. То, что я думал, было чем-то вроде двухуровневого ящика, в нижней части которого скрыты механики. Управлять им будет джойстик, спрятанный под выступом. Кроме того, я действительно понятия не имел, как я собираюсь это сделать.
Обыскав груду дров, я нашел полноприводный автомобиль, который я спас из другого проекта, и нашел несколько отборных сосен, которые в целом были довольно хороши. Поэтому, пообещав боссу заменить то, что собирался взять, я отнес пиломатериалы в магазин и начал строительство.
Шаг 8. Создание двухуровневого бокса

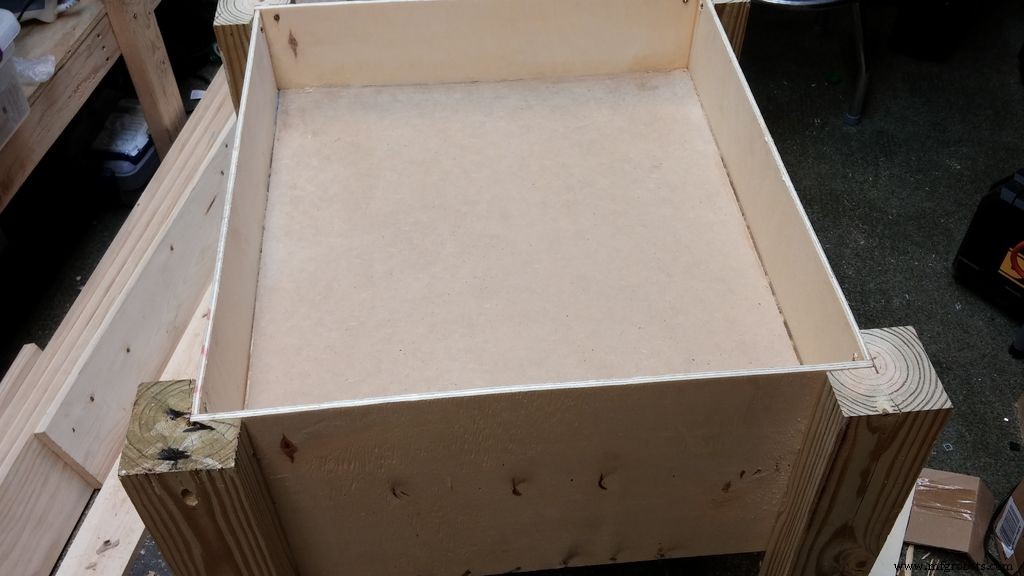




После измерения и резки фанеры толщиной 1/4 дюйма я хотел попробовать новый способ удержания ее вместе, пока клей остается. Я приклеил по углам картон горячим способом. Этот метод, казалось, работал хорошо, поскольку он удерживал коробку вместе достаточно долго, чтобы принять другие меры, чтобы удержать ее вместе. Построив разделение для верха и низа и убедившись, что оно ровное, я закрепил петлю пианино так, чтобы нижняя часть стола, на которой будет держаться портал, могла выпасть, чтобы ее можно было поддерживать.
Шаг 9:Изготовление ножек стола


В качестве ножек стола я хотел использовать сосновый внедорожник, который я вытащил из игрового домика, который раньше находился в моей детской игрушечной комнате. Для начала я убедился, что в 4x4 нет шурупов и гвоздей / скоб. Я измерил и разрезал 4x4 на 4 секции по 25 дюймов. Затем я пропустил 4 ножки через плоскодонку много раз, чтобы удалить краску и очистить ее.
После нескольких прогулок по равнине я использовал линейку и зажимы, чтобы сделать импровизированное приспособление, чтобы я мог использовать пилу для навыков, как настольную пилу. Это сработало хорошо, и у меня остались 4 чистые и гладкие L-образные ножки, которые отлично подходили для моих целей.
Шаг 10:Установка боковин

После того, как ноги были прикреплены, приступил к бокам. Последовало множество тщательных измерений. Вы должны быть как можно ближе, чтобы оставалось как можно меньше промежутков. Я приклеил детали на место и вкрутил в них несколько шурупов с нижней стороны двухуровневой коробки.
Шаг 11. Отшлифуйте песок и еще немного песка


При создании чего-либо формы я рекомендую неоправданную шлифовку, начиная с более плотной наждачной бумаги (например, зернистостью 80–120) и заканчивая более мелкой (зернистостью менее 200) наждачной бумагой. Время, которое вы потратите на устранение любых недостатков, будет вознаграждено, когда проект будет завершен.
Шаг 12:Установка светодиодных ламп

Как только я узнал, где будет сидеть верх, я сделал кусок МДФ толщиной 1/8 дюйма, чтобы он располагался между верхом и основанием. Я отметил, где будет располагаться деталь, а затем перевернул ее и прикрепил светодиодную ленту к нижней стороне с помощью стяжек и горячего клея. По моему опыту, безрассудно полностью полагаться на горячий клей сам по себе при закреплении всего, что может создавать тепло само по себе (например, световой полосы). Я просверлил отверстие и проложил провод питания для фонарей к нижней стороне двухуровневой коробки. Я собирался включить свет от того же источника 12 В, что и шаговые двигатели, но у меня возникли проблемы, когда свет заставлял двигатели гудеть, поэтому я снабдил его собственным источником питания 12 В.
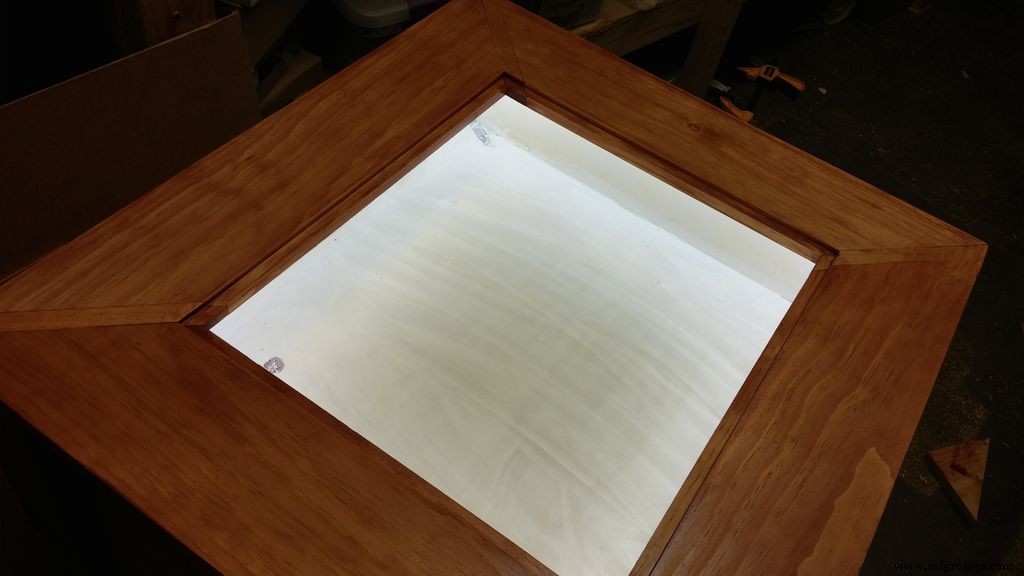
Шаг 13:Установка верхней части
У меня нет большого опыта резки митров; Я не прирожденный плотник. Но после долгих проб и ошибок мне удалось создать красивый топ. Я использовал приспособление для крепления крег, упомянутое в шаге «Детали», чтобы скрепить вместе четыре стороны верха, и это сработало замечательно.
Когда вы измеряете детали для верха, убедитесь, что вы измеряете правильно. Лучше быть слишком большим и снова разрезать или отшлифовать, чем слишком маленьким. После того, как вы отрежете части для верха и убедитесь, что они подходят друг к другу так, как вы хотите, фрезеруйте отдельные части так, чтобы стекло вошло в них заподлицо. Убедитесь, что глубина маршрутизатора соответствует вашему стеклу. В моем случае стекло было 1/4 дюйма.
После того, как верх был приклеен и прикручен, я прикрутил его к основанию с помощью зажимного приспособления для крага на тыльной стороне ножек, где это было бы незаметно.
Я позвонил в местную мастерскую по ремонту автомобильных стекол и заказал листовое стекло на 1/4 дюйма, на 1/16 меньше, чем проем. Еще попросил отшлифовать края, чтобы не порезались руки. Я не буду использовать акрил для крепления стекла просто потому, что хотел бы иметь возможность снимать стекло, чтобы я мог переставить камни.
Шаг 14:Condition, Stain, Poly, Sand и Poly снова
Поскольку сосна - такая пористая древесина, я не хотел, чтобы она выглядела пятнистой, поэтому я использовала кондиционер для предварительной окраски древесины, чтобы выровнять пятно. Затем я нанесла на него поликраситель Minnwax Natural Cherry и дала ему высохнуть. На следующий день я вернулся и слегка отшлифовал стол наждачной бумагой с зернистостью 320, а затем нанес еще один слой полиамида. Если бы мне пришлось проделать это снова, я бы красил и полировал его отдельно; Это был кошмар - получить пятно и полиэтиленовое покрытие, чтобы не оставалось следов капель и тому подобного. Кроме того, если вы хотите, чтобы он был темнее, вы не можете снова окрасить его, чтобы он стал темнее. Я закончил тем, что отшлифовал его и покрыл заново несколько раз, пока не остался доволен результатом. Я не думаю, что снова буду использовать поли-краситель.
Шаг 15:Установка электроники

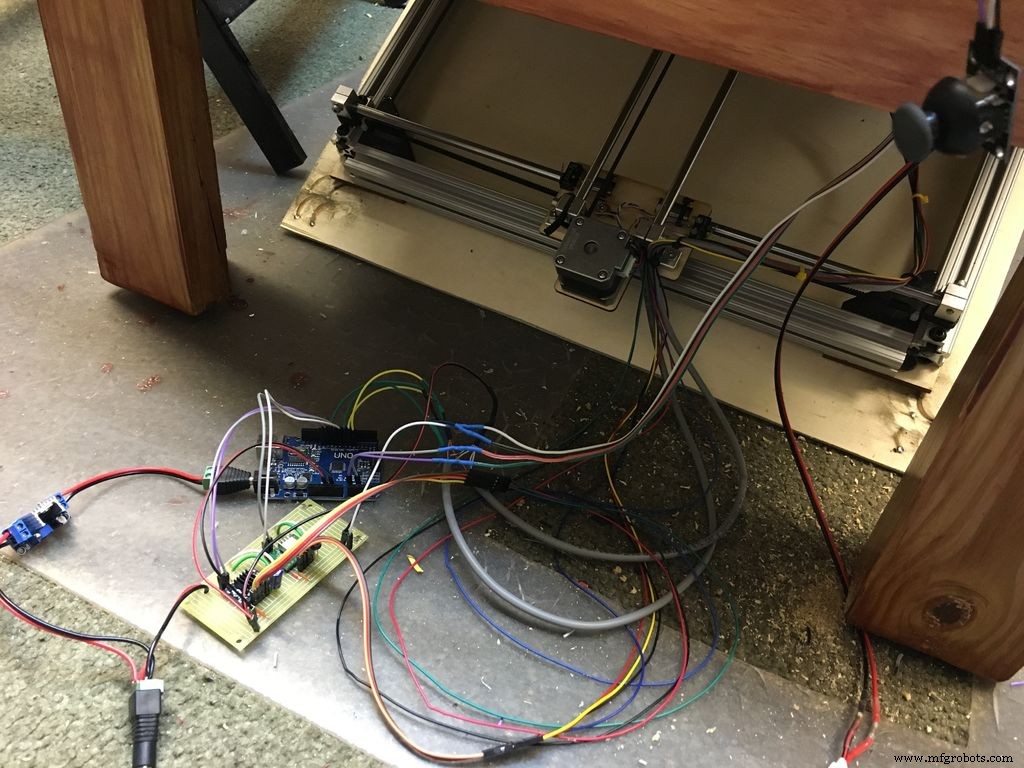
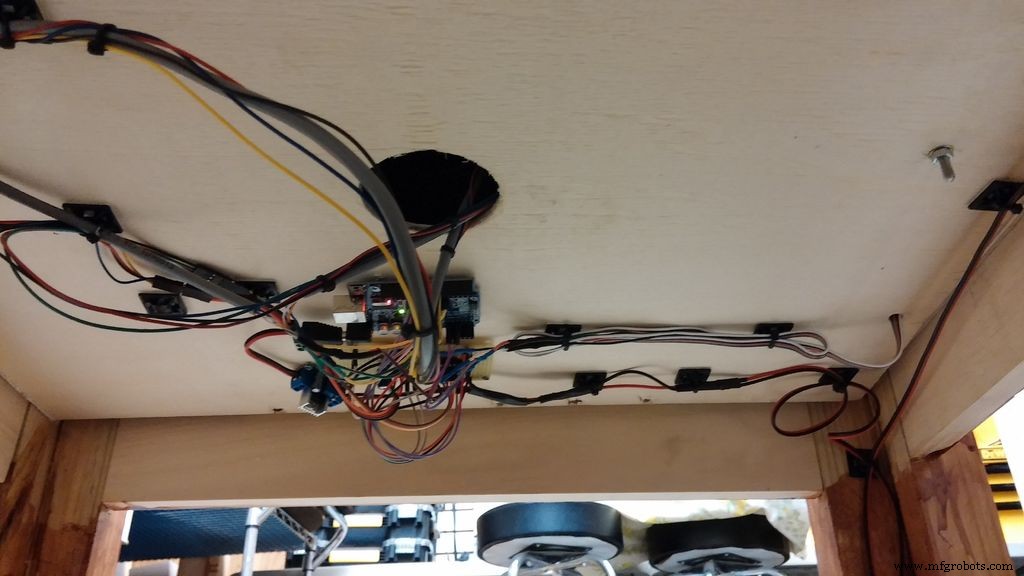


Я построил люк внизу, чтобы весь портал можно было прикрепить к люку и упал, чтобы над ним работали, поддерживали или модернизировали. Я установил портал на люк с помощью пластиковых ремней с двумя отверстиями для кабелепровода. Я установил ремни вокруг экструзии 2020 года. Кажется, это хорошо работает.
Я пробовал несколько разных путей, чтобы установить Arduino и макетную плату. В итоге я вырезал отверстие в нижней части люка по центру, пропустил через него все кабели и установил электронику под столом.
Когда монтировал джойстик, долго думал, как его монтировать. Честно говоря, ничего умного придумать не мог, поэтому просто приклеил под край стола. Я протолкнул кабель джойстика как можно глубже в угол и тоже приклеил его горячим клеем. Это не самое царственное решение, но вы не сможете его увидеть, если не ползете рядом с ним, поэтому я доволен им.
С нижней стороны я закрепил платы маленькими шурупами и постарался все привести в порядок как можно лучше. Я также переместил силовые вилки на заднюю часть задней ножки и приклеил их на место.
Шаг 16. Магнитная головка Toolhead?

Я не знал, как прикрепить магнит к болту, который хотел использовать. Я думал, что болт подойдет, потому что я могу легко отрегулировать ось z. В итоге я отрезал небольшую длину (1–1 1/2 дюйма) дюбеля 3/4 дюйма и просверлил отверстие, в которое мог бы поместиться болт. Затем я прикрутил к ней магнит. Теперь я могу отрегулировать его вверх и вниз, ослабив гайку внизу.
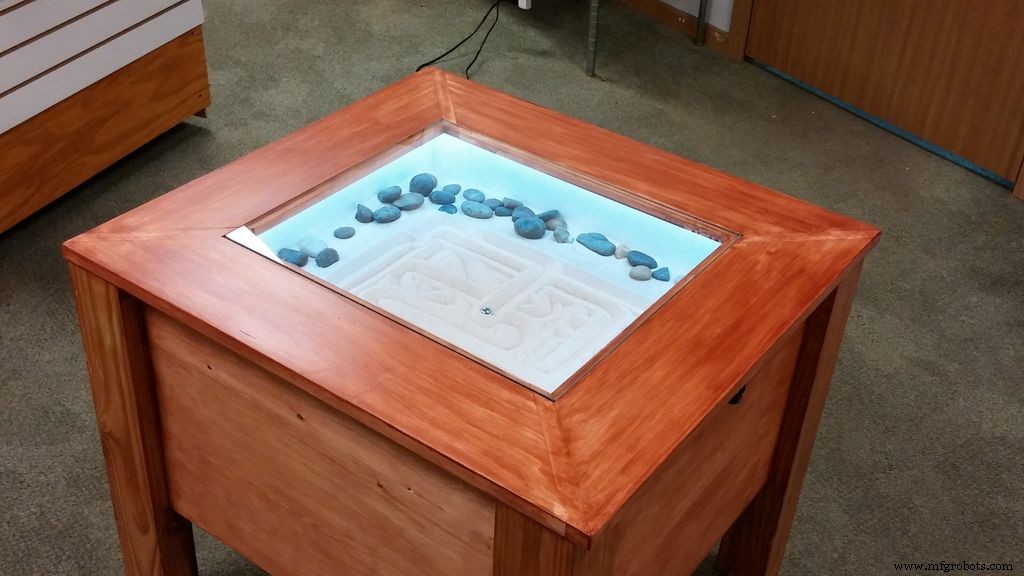
Шаг 17:Создание сада камней




Как только электроника была установлена, я приступил к созданию альпинария. Я не был уверен, сколько потребуется песка, поэтому купил 25-фунтовый ящик с песком. Оглядываясь назад, я думаю, что мне бы сошло с рук от 5 до 10 фунтов. Большая часть песка все еще находится в ящике. Разложив песок, я немного погнал мяч. Я хотел проверить, не видно ли дна коробки, когда мяч катится. Я добавил песок и продолжал тестировать, пока не нашел глубину песка, которая мне понравилась.
Затем я добавил 2 мешка гладких речных камней по краям. Я старался их равномерно распределить. Я подумал, может, приклеить речные камни, но подумал, что было бы лучше иметь возможность переставить их в будущем, если бы я захотел.
Шаг 18. Таблица в действии





Увы, стол она двигается. Как только я заставил стол сдвинуться с места, я просто стоял там и слишком долго водил мячом - лол. Есть что-то чрезвычайно приятное в том, чтобы наблюдать, как металлический шар толкает песок. Это был долгий путь, и очень приятно видеть, как этот стол движется так, как я себе представлял.
Шаг 19. Все готово
Это был долгий и тяжелый проект. Хотя это было очень весело.
Код
- code.ino
code.ino C / C ++
/ * * Простая демонстрация, должна работать с любой платой драйверов * * Подключите STEP, DIR, как указано * * Copyright (C) 2015 Laurentiu Badea * * Этот файл может распространяться в соответствии с условиями лицензии MIT. * Копия этой лицензии включена в этот дистрибутив в файле LICENSE. * / / * * Отредактировано Эрнестом Э. Гарнером из библиотеки StepperDriver * Дата:20 ноября 2016 г. * * Описание кода:* Используется для управления базовым гантри x / y для таблицы zen, созданной Эрнестом Джеймсом Гарнером для Instructables .com * / # include#include "BasicStepperDriver.h" // # define DEBUG // Количество шагов двигателя на оборот. Большинство шаговых двигателей составляют 200 шагов или 1,8 градуса / шаг # define X_MOTOR_STEPS 200 # define Y_MOTOR_STEPS 200 // Направление двигателя к дому // варианты 1 (вперед) // -1 (назад) #define STEP_FORWARD 1 # define STEP_REVERSE -1 #define X_DIR_HOME STEP_FORWARD #define Y_DIR_HOME STEP_FORWARD // Все провода, необходимые для полной функциональности # define X_MAX_PIN 6 # define X_HOME_PIN 7 // home pin. #Define X_DIR_PIN 8 # define X_STEP_PIN 9 #define X_ANALOG_PIN A0 # define Y_MAX_PIN_ 5 #define Y_HOME_PIN 5 #define Y_HOME 11 # define Y_STEP_PIN 12 #define Y_ANALOG_PIN A2 // Поскольку микрошаги устанавливаются извне, убедитесь, что он соответствует выбранному режиму // 1 =полный шаг, 2 =полушаг и т. Д. # Define MICROSTEPS 1 // 2-проводная базовая конфигурация, микрошаг жестко закреплен на драйвереBasicStepperDriver x_stepper (X_MOTOR_STEPS, X_DIR_PIN, X_STEP_PIN, X_HOME_PIN, X_MAX_PIN); BasicStepperDriver y_stepper (Y_MOTOR_STEPS, Y_DIR_PIN_, Y_STEP_PIN); () {#ifdef DEBUG Se rial.begin (9600); #endif / * * Установить целевое число оборотов двигателя. * Эти двигатели могут развивать скорость до 200 об / мин. * Слишком высокое значение вызовет пронзительный вой, и двигатель не будет двигаться. * * Мы хотим, чтобы эти двигатели двигались медленно. * / x_stepper.setRPM (100); y_stepper.setRPM (100); / * * Сообщаем драйверу, какой уровень микрошага мы выбрали. * В случае несовпадения, двигатель будет вращаться с другой скоростью, отличной от выбранной. * / x_stepper.setMicrostep (МИКРОСТЕПС); y_stepper.setMicrostep (MICROSTEPS);} void loop () {/ * * Перемещение двигателя на один полный оборот в градусах * / // 1024/2 =512 // 512 - 40 =472 // 512 + 40 =552 x_analog =analogRead (X_ANALOG_PIN); // Джойстик повернут в обратном направлении, а HOME не нажат // if ((x_analog <472) &&(digitalRead (X_HOME_PIN) ==HIGH)) {if ((x_analog <472)) {x_stepper.move (-40); } иначе, если ((x_analog> 552)) {x_stepper.move (40); } #ifdef DEBUG Serial.print ("X:"); Serial.print (x_analog); //Serial.print (x_stepper.getDirection ()); #endif y_analog =analogRead (Y_ANALOG_PIN); // если ((y_analog <472) &&(digitalRead (Y_HOME_PIN) ==HIGH)) {if ((y_analog <472)) {y_stepper.move (-40); } иначе, если ((y_analog> 552)) {y_stepper.move (40); } #ifdef DEBUG Serial.print ("Y:"); Serial.println (y_analog); //Serial.getDirection(y_stepper. #Endif}
Изготовленные на заказ детали и корпуса
fty8akaivo3t4x1_u1xz65PyoT.dxf fzuawwrivo3t4wz_PdKRLpvu3f.cdrСхема
Производственный процесс
- Руководство по созданию прототипов с ЧПУ
- Таблица
- Бильярдный стол
- Станок с ЧПУ
- Стандартные двигатели с ЧПУ:шаговые и сервомоторы
- Плазменный стол с ЧПУ 4x8 для резки листового металла
- 1325 4-осевой фрезерный станок с ЧПУ ATC с таблицей PTP
- Выбор правильного плазменного стола с ЧПУ
- Что такое токарная обработка с ЧПУ?
- Введение в приводной поворотный стол