


Серворадар
Компоненты и расходные материалы
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Об этом проекте
Как мы знаем, для обнаружения спутников, небесных объектов, сигналов астероидов и т. Д. Из космоса нам нужен радар для многих целей. НАСА использует многие из радаров для наших военных целей и космических целей. На самом деле мой проект - радар, который отображает «объект обнаружен» на последовательном мониторе, когда объект находится в 10 см от радара. это работает на основе ультразвуковых волн, которые распространяются звуковыми всплесками, поэтому нам понадобится ультразвуковой датчик .

Далее для программирования и выполнения кода, чтобы заставить его работать, нам понадобится Arduino (любая плата, но попробуйте использовать UNO); На мой взгляд, Arduino идеально подходит для этого проекта, поскольку имеет отличный тип хранения и отображения данных. При отображении слова нам также потребуется использовать монитор последовательного порта . Теперь, чтобы повернуть датчик, чтобы распространить его волны и собрать их обратно, чтобы рассчитать расстояние, нам понадобится сервопривод . Теперь для связи между оборудованием нам понадобятся перемычки и макетная плата .
Теперь давайте посмотрим, как это работает:ультразвуковой датчик посылает волны, которые создают ультразвуковой импульс 8 циклов в минуту, а затем принимают его с помощью контактов, затем он передает данные на плату, которая вычисляет расстояние, а затем загружает их в последовательный монитор. сервопривод продолжает вращаться от 0 до 180 градусов, а arduino продолжает вычислять угол, на который он переместился, и загружает его на последовательный монитор. Когда ультразвуковой датчик обнаруживает, что расстояние меньше 10 см, Arduino узнает об объекте и печатает «объект обнаружен» на последовательном мониторе.
используя этот фундаментальный принцип, работает мой серворадар Arduino.

Если вам нравится мой радар, пожалуйста, уважайте мой проект, и если радар не работает должным образом или есть какая-то ошибка, о которой вы думаете, пожалуйста, сообщите мне в комментариях, и я исправлю ошибку.
Код
- код серворадара
код серворадара Arduino
диаграмма может немного отличаться от кода, поэтому попробуйте следовать коду#includeServo myservo; int Ang =0; long duration; int distance; const int trigpin =8; const int echopin =11; void setup () {Serial.begin (9600); myservo.attach (3); pinMode (триггер, ВЫХОД); pinMode (echopin, INPUT);} void loop () {для (Ang =0; Ang <=180; Ang + =1) {myservo.write (Ang); задержка (15); } для (Ang =180; Ang> =0; Ang - =1) {myservo.write (Ang); задержка (200); digitalWrite (триггерный, LOW); delayMicroseconds (2); digitalWrite (триггер, ВЫСОКИЙ); delayMicroseconds (15); digitalWrite (триггерный, LOW); duration =pulseIn (echopin, HIGH); расстояние =продолжительность * 0,034 / 2; Serial.println ("Расстояние"); Serial.println (расстояние); Serial.println («Угол»); Serial.println (Ang); if (distance <=10) Serial.println («объект обнаружен»); }}
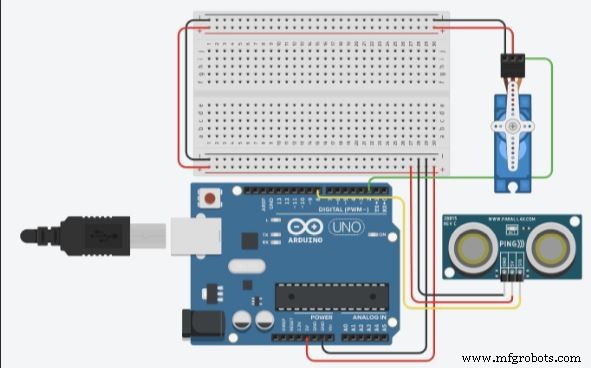
Схема
подключить следующиеДатчик Arduino
VCC - 5 В
тригпин - 8
эхопин - 11
gnd - земля
серво Arduino
положительный вывод - 5В
отрицательный вывод - земля
шпилька - 3
пожалуйста, следуйте вышеизложенному
Производственный процесс
- Зачем нужно профилактическое обслуживание
- Почему мне нужно заменять перегрузочный мост?
- Быстро развивающийся мир моделирования
- Автоматизации недостаточно — вам нужна гиперавтоматизация
- Что такое портал?
- Вам нужны новые штормовые тормоза?
- В каком обслуживании нуждаются барабанные тормоза?
- Нужен станок с ЧПУ?
- Нужен 5-осевой станок VMC?
- Нужен электрический трубогиб?