


Многофазные индукционные двигатели Тесла
Большинство двигателей переменного тока являются асинхронными. Асинхронные двигатели пользуются популярностью из-за их прочности и простоты. Фактически, 90% промышленных двигателей - это асинхронные двигатели.
Никола Тесла разработал основные принципы многофазного асинхронного двигателя в 1883 году и к 1888 году создал модель мощностью в половину лошадиных сил (400 Вт). Тесла продал права на производство Джорджу Вестингаузу за 65 000 долларов.
Самые большие (> 1 л.с. или 1 кВт) промышленные двигатели - это многофазные асинхронные двигатели . . Под многофазностью мы подразумеваем, что статор содержит несколько различных обмоток на каждый полюс двигателя, приводимых в действие соответствующими синусоидальными волнами со сдвигом во времени.
На практике это две-три фазы. Крупные промышленные двигатели трехфазные. Хотя для простоты мы включили многочисленные иллюстрации двухфазных двигателей, мы должны подчеркнуть, что почти все многофазные двигатели являются трехфазными.
асинхронным двигателем , мы имеем в виду, что обмотки статора индуцируют ток в проводниках ротора, как трансформатор, в отличие от коллекторного электродвигателя постоянного тока.
Конструкция асинхронного двигателя переменного тока
Асинхронный двигатель состоит из ротора, известного как якорь, и статора, содержащего обмотки, подключенные к многофазному источнику энергии, как показано на рисунке ниже. Простой двухфазный асинхронный двигатель, представленный ниже, похож на двигатель мощностью 1/2 лошадиные силы, который Никола Тесла представил в 1888 году.
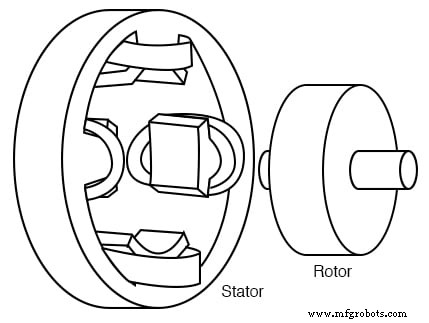
Многофазный асинхронный двигатель Тесла
Статор на рисунке выше намотан парами катушек, соответствующих фазам имеющейся электрической энергии. Статор двухфазного асинхронного двигателя выше имеет 2 пары катушек, по одной паре для каждой из двух фаз переменного тока.
Отдельные катушки пары соединены последовательно и соответствуют противоположным полюсам электромагнита. То есть одна катушка соответствует N-полюсу, другая - S-полюсу, пока фаза переменного тока не изменит полярность. Другая пара катушек ориентирована под углом 90 ° к первой паре.
Эта пара катушек подключена к переменному току, сдвинутому во времени на 90 ° в случае двухфазного двигателя. Во времена Теслы источником двух фаз переменного тока был двухфазный генератор переменного тока.
Статор на рисунке выше имеет выступ , очевидно выступающие полюса, которые использовались в ранних асинхронных двигателях Tesla. Эта конструкция используется по сей день для двигателей с малой мощностью (<50 Вт). Однако для более мощных двигателей меньшая пульсация крутящего момента и более высокий КПД достигается, если катушки встроены в пазы, вырезанные в пластинах статора (рисунок ниже).
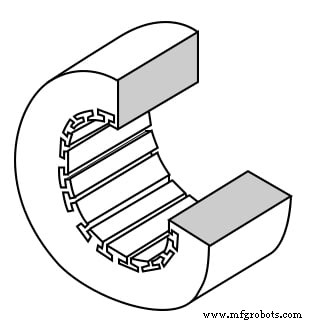
Рама статора с прорезями для обмоток
Пластины статора представляют собой тонкие изолированные кольца с прорезями, пробитыми из листов электротехнической стали. Набор из них закреплен концевыми винтами, которые также могут удерживать концевые кожухи.
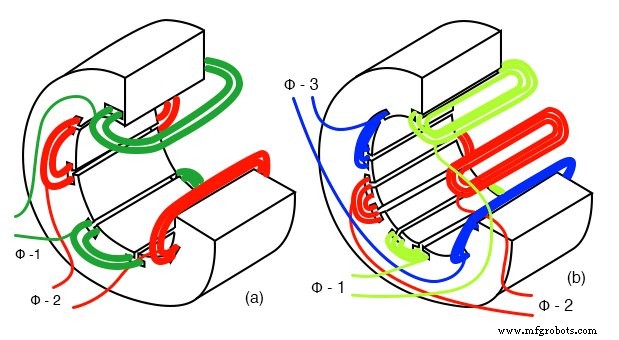
Статор с обмотками 2 φ (а) и 3 φ (б)
На рисунке выше обмотки двухфазного и трехфазного двигателей установлены в пазы статора. Катушки наматываются на внешнее приспособление, а затем вставляются в пазы. Изоляция, зажатая между периферией катушки и прорезью, защищает от истирания.
Фактические обмотки статора более сложные, чем отдельные обмотки на полюс на рисунке выше. Сравнивая двигатель 2-φ с двигателем Tesla 2-φ с явными полюсами, количество катушек такое же. В реальных больших двигателях обмотка полюса разделена на идентичные катушки, вставленные во много меньших пазов, чем указано выше.
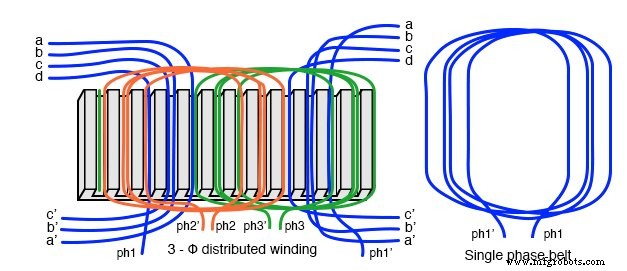
Эта группа называется фазовым поясом . (см. рисунок ниже). Распределенные катушки фазового пояса подавляют некоторые нечетные гармоники, создавая более синусоидальное распределение магнитного поля по полюсу. Это показано в разделе синхронного двигателя.
В прорезях на краю стойки может быть меньше витков, чем в других прорезях. Краевые пазы могут содержать обмотки от двух фаз. То есть фазовые пояса перекрываются.
Ключом к популярности асинхронного двигателя переменного тока является его простота, о чем свидетельствует простой ротор (рисунок ниже). Ротор состоит из вала, стального пластинчатого ротора и встроенной медной или алюминиевой беличьей клетки . , показанный в (b) снят с ротора.
По сравнению с якорем двигателя постоянного тока, здесь нет коммутатора. Это устраняет щетки, искрение, искрение, графитовую пыль, регулировку и замену щеток, а также повторную обработку коллектора.
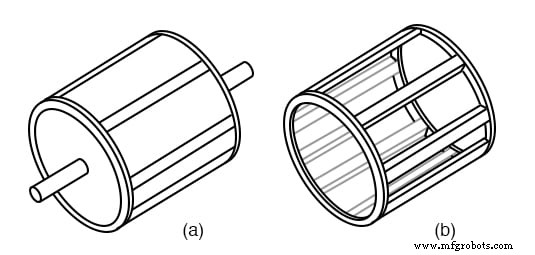
Ламинированный ротор с (а) встроенной беличьей клеткой, (б) токопроводящей клеткой, удаленной с ротора
Проводники с короткозамкнутым ротором могут быть перекошены, скручены относительно вала. Несоосность пазов статора снижает пульсации крутящего момента.
Сердечники как ротора, так и статора состоят из пакета изолированных пластин. Пластины покрыты изолирующим оксидом или лаком для минимизации потерь на вихревые токи. Сплав, используемый в пластинах, выбран с учетом низких гистерезисных потерь.
Теория работы асинхронных двигателей
Краткое объяснение работы заключается в том, что статор создает вращающееся магнитное поле, которое волочит ротор вокруг себя.
Теория работы асинхронных двигателей основана на вращающемся магнитном поле. Один из способов создания вращающегося магнитного поля - вращение постоянного магнита. Если движущиеся магнитные линии потока разрезают проводящий диск, он будет следовать за движением магнита.
Линии магнитного потока, разрезающие проводник, будут индуцировать напряжение и, как следствие, ток в проводящем диске. Этот поток тока создает электромагнит, полярность которого противодействует движению постоянного магнита - закон Ленца .
Полярность электромагнита такова, что он притягивается к постоянному магниту. Диск следует с немного меньшей скоростью, чем постоянный магнит.
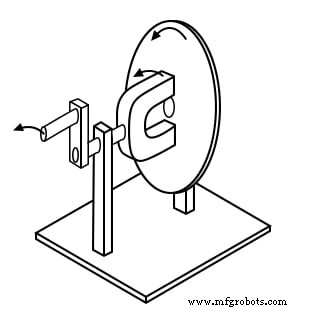
Вращающееся магнитное поле создает крутящий момент в проводящем диске
Крутящий момент, развиваемый диском, пропорционален количеству силовых линий, разрезающих диск, и скорости, с которой он разрезает диск. Если бы диск вращался с той же скоростью, что и постоянный магнит, не было бы ни потока, разрезающего диск, ни индуцированного тока, ни поля электромагнита, ни крутящего момента.
Таким образом, скорость диска всегда будет ниже скорости вращающегося постоянного магнита, так что магнитные линии, разрезающие диск, индуцируют ток, создают электромагнитное поле в диске, которое следует за постоянным магнитом.
Если к диску приложена нагрузка, замедляющая его, будет развиваться больший крутящий момент, поскольку больше линий магнитного потока разрезают диск. Крутящий момент пропорционален скольжению , степень отставания диска от вращающегося магнита. Большее скольжение соответствует большему потоку, разрезающему токопроводящий диск, создавая больший крутящий момент.
В основе аналогового автомобильного вихретокового спидометра лежит принцип, проиллюстрированный выше. Когда диск удерживается пружиной, отклонение диска и иглы пропорционально скорости вращения магнита.
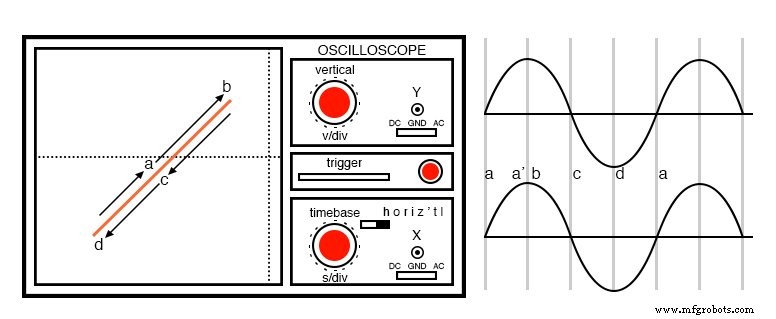
Вращающееся магнитное поле создается двумя катушками, расположенными под прямым углом друг к другу, управляемыми токами, которые не совпадают по фазе на 90 °. Это не должно вызывать удивления, если вы знакомы с диаграммами Лиссажу на осциллографах.
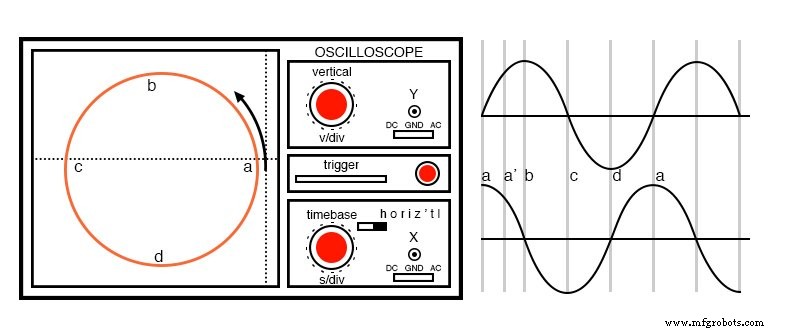
В противофазе (90 °) синусоидальные волны образуют круговой узор Лиссажу
На приведенном выше рисунке круговой Лиссажу получается путем подачи на входы осциллографа горизонтального и вертикального сдвига по фазе синусоидальных волн на 90 °. Начиная с (a) с максимальным отклонением «X» и минимальным «Y», след перемещается вверх и влево в направлении (b).
Между (a) и (b) две формы волны равны 0,707 Vpk при 45 °. Эта точка (0,707, 0,707) попадает на радиус окружности между (a) и (b). Трасса перемещается в (b) с минимальным отклонением «X» и максимальным «Y». При максимальном отрицательном отклонении «X» и минимальном «Y» след перемещается в (c).
Затем с минимальным «X» и максимальным отрицательным «Y» он переходит в (d), а затем обратно в (a), завершая один цикл.
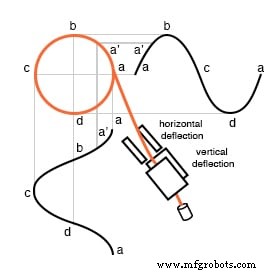
Обводка синуса по оси X и косинуса по оси Y
На рисунке показаны две синусоидальные волны с фазовым сдвигом на 90 °, приложенные к отклоняющим пластинам осциллографа, расположенным под прямым углом в пространстве. Комбинация фазированных синусоидальных волн на 90 ° и отклонения под прямым углом дает двумерный узор - круг. Этот круг очерчен электронным лучом, вращающимся против часовой стрелки.
Для справки, на рисунке ниже показано, почему синфазные синусоидальные волны не образуют круговой диаграммы. Равное отклонение «X» и «Y» перемещает освещенное пятно от исходной точки в (a) вверх вправо (1,1) в (b), назад вниз влево к исходной точке в (c), вниз влево до (-1 .-1) в точке (d) и обратно в исходное положение. Линия получается равными прогибами по обеим осям; y =x - прямая линия.
Нет кругового движения от синфазных сигналов
Если пара синусоидальных волн, сдвинутых на 90 ° по фазе, создает круговой Лиссажу, подобная пара токов должна быть способна создавать круговое вращающееся магнитное поле. Так обстоит дело с двухфазным двигателем. По аналогии, три обмотки, расположенные в пространстве на 120 ° друг от друга и питаемые соответствующими фазированными токами 120 °, также будут создавать вращающееся магнитное поле.
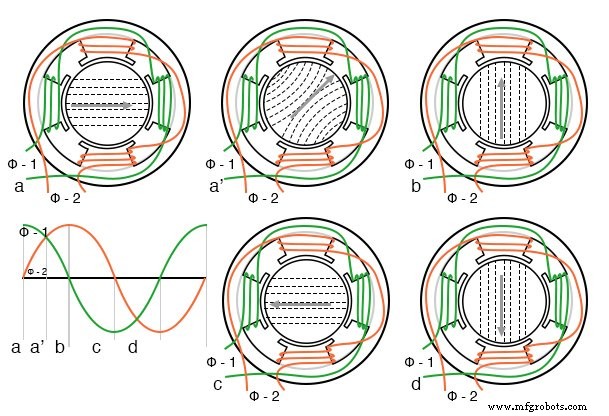
Вращающееся магнитное поле из фазированных синусоидальных волн под углом 90 °
Поскольку синусоидальные волны с фазой 90 °, показанные на рисунке выше, развиваются от точек (a) до (d), магнитное поле вращается против часовой стрелки (рисунки a-d) следующим образом:
- (a) φ-1 максимум, φ-2 ноль
- (a ’) φ-1 70%, φ-2 70%
- (b) φ-1 ноль, φ-2 максимум
- (c) φ-1 максимально отрицательный, φ-2 ноль.
- (d) φ-1 ноль, φ-2 максимальное отрицательное значение
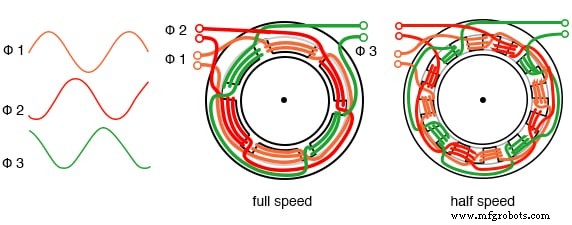
Полная скорость двигателя и скорость синхронного двигателя
Скорость вращения вращающегося магнитного поля статора связана с количеством пар полюсов на фазу статора. На приведенном ниже рисунке «полная скорость» всего шесть полюсов или три пары полюсов и три фазы. Однако для каждой фазы используется только одна пара полюсов.
Магнитное поле будет вращаться один раз за цикл синусоидальной волны. В случае мощности 60 Гц поле вращается со скоростью 60 раз в секунду или 3600 оборотов в минуту (об / мин). При мощности 50 Гц он вращается со скоростью 50 оборотов в секунду или 3000 об / мин. 3600 и 3000 об / мин - это синхронная скорость . двигателя.
Хотя ротор асинхронного двигателя никогда не достигает этой скорости, это определенно верхний предел. Если мы удвоим количество полюсов двигателя, синхронная скорость сократится вдвое, потому что магнитное поле вращается в пространстве на 180 ° на 360 ° электрической синусоидальной волны.
Удвоение полюсов статора вдвое снижает синхронную скорость
Синхронная скорость определяется по формуле:
N s =120 · f / P N s =синхронная скорость в об / мин f =частота подаваемой мощности, Гц P =общее количество полюсов на фазу, кратное 2
Пример: На приведенном выше рисунке «половинная скорость» четыре полюса на фазу (3 фазы). Синхронная скорость для мощности 50 Гц составляет:S =120 · 50/4 =1500 об / мин
Краткое объяснение асинхронного двигателя заключается в том, что вращающееся магнитное поле, создаваемое статором, увлекает за собой ротор.
Более длинное и правильное объяснение состоит в том, что магнитное поле статора индуцирует переменный ток в проводниках короткозамкнутого ротора, которые составляют вторичную обмотку трансформатора. Этот индуцированный ток ротора, в свою очередь, создает магнитное поле.
Магнитное поле вращающегося статора взаимодействует с этим полем ротора. Поле ротора пытается выровняться с полем вращающегося статора. Результат - вращение ротора с короткозамкнутым ротором. Если бы не было механической нагрузки крутящего момента двигателя, подшипников, потерь на ветер или других потерь, ротор вращался бы с синхронной скоростью.
Однако промах Между ротором и полем статора синхронной скорости развивается крутящий момент. Именно магнитный поток, разрезающий проводники ротора при его проскальзывании, создает крутящий момент. Таким образом, нагруженный двигатель будет скользить пропорционально механической нагрузке.
Если бы ротор работал с синхронной скоростью, не было бы потока статора, разрезающего ротор, не было бы тока, индуцированного в роторе, не было бы крутящего момента.
Крутящий момент в асинхронных двигателях
Когда питание подается на двигатель впервые, ротор находится в состоянии покоя, а магнитное поле статора вращается с синхронной скоростью N s . Поле статора режет ротор с синхронной скоростью N s . Ток, индуцированный в закороченных витках ротора, является максимальным, как и частота тока, частота сети.
По мере увеличения скорости ротора скорость, с которой магнитный поток статора сокращает ротор, является разницей между синхронной скоростью N s и фактическая частота вращения ротора N, или (N s - N). Отношение фактического потока, разрезающего ротор, к синхронной скорости определяется как скольжение :
s =(N s - N) / N s где:N s =синхронная скорость, N =скорость ротора
Частота тока, индуцируемого в проводниках ротора, равна только частоте сети при пуске двигателя и уменьшается по мере приближения ротора к синхронной скорости. Частота ротора предоставляется:
f r =s · f, где:s =скольжение, f =частота статора в линии питания
Скольжение при 100% крутящем моменте обычно составляет 5% или меньше в асинхронных двигателях. Таким образом, для частоты сети f =50 Гц частота наведенного тока в роторе fr =0,05 · 50 =2,5 Гц. Почему он такой низкий? Магнитное поле статора вращается с частотой 50 Гц. Скорость вращения ротора на 5% меньше.
Вращающееся магнитное поле режет ротор только с частотой 2,5 Гц. 2,5 Гц - это разница между синхронной скоростью и фактической скоростью ротора. Если ротор вращается немного быстрее при синхронной скорости, никакой поток не будет резать ротор вообще, f r =0.
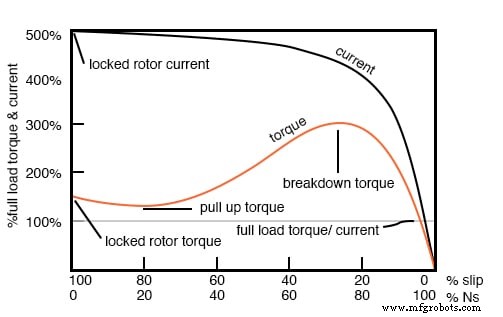
Крутящий момент и скорость в зависимости от% скольжения. % N s =% Синхронной скорости
На рисунке выше показано, что пусковой момент, известный как крутящий момент заблокированного ротора (LRT) выше 100% от крутящего момента полной нагрузки (FLT), безопасный продолжительный крутящий момент. Крутящий момент заблокированного ротора составляет около 175% от FLT для приведенного выше примера двигателя.
Пусковой ток, известный как ток заторможенного ротора (LRC) составляет 500% от тока полной нагрузки (FLC), безопасный рабочий ток. Ток большой, потому что это аналог закороченной вторичной обмотки трансформатора. Когда ротор начинает вращаться, крутящий момент может немного уменьшиться для определенных классов двигателей до значения, известного как тяговый момент . .
Это самое низкое значение крутящего момента, с которым когда-либо сталкивался пусковой двигатель. Когда ротор набирает 80% синхронной скорости, крутящий момент увеличивается со 175% до 300% крутящего момента полной нагрузки. Этот момент пробоя происходит из-за большего, чем обычно, 20% скольжения.
Сила тока на этом этапе уменьшилась лишь незначительно, но после этой точки будет быстро уменьшаться. Когда ротор ускоряется с точностью до нескольких процентов от синхронной скорости, как крутящий момент, так и ток значительно уменьшаются. При нормальной работе скольжение будет только на несколько процентов.
Для работающего двигателя любой участок кривой крутящего момента ниже 100% номинального крутящего момента является нормальным. Нагрузка двигателя определяет рабочую точку на кривой крутящего момента. В то время как крутящий момент и ток двигателя могут превышать 100% в течение нескольких секунд во время запуска, продолжительная работа выше 100% может привести к повреждению двигателя.
Любая крутящая нагрузка двигателя, превышающая крутящий момент пробоя, приведет к остановке двигателя. Крутящий момент, скольжение и ток будут приближаться к нулю в условиях нагрузки «без механического крутящего момента». Это состояние аналогично разомкнутому вторичному трансформатору.
Существует несколько основных конструкций асинхронных двигателей, которые значительно отличаются от кривой крутящего момента, приведенной выше. Различные конструкции оптимизированы для запуска и работы с различными типами нагрузок. Крутящий момент заблокированного ротора (LRT) для двигателей различных конструкций и размеров составляет от 60% до 350% от крутящего момента полной нагрузки (FLT).
Пусковой ток или ток заторможенного ротора (LRC) может находиться в диапазоне от 500% до 1400% от тока полной нагрузки (FLC). Такое потребление тока может стать причиной проблем с запуском больших асинхронных двигателей.
Классы двигателей NEMA и IEC
Различные стандартные классы (или конструкции) двигателей, соответствующие кривым крутящего момента (рисунок ниже), были разработаны для лучшего управления нагрузками различных типов. Национальная ассоциация производителей электрооборудования (NEMA) определила классы двигателей A, B, C и D для удовлетворения этих требований к приводам.
Аналогичные классы N и H Международной электротехнической комиссии (IEC) соответствуют конструкциям NEMA B и C соответственно.
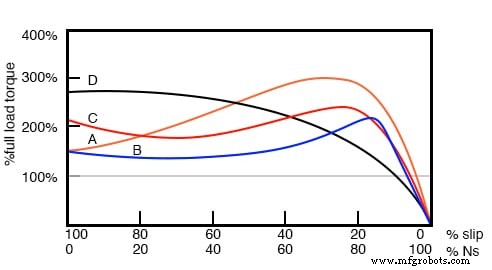
Характеристики для проектов NEMA
Все двигатели, кроме класса D, при полной нагрузке работают со скольжением не более 5%.
- Класс B (IEC класс N) двигатели - это двигатели по умолчанию, которые используются в большинстве приложений. При пусковом моменте LRT =от 150% до 170% от FLT он может запускать большинство нагрузок без чрезмерного пускового тока (LRT). КПД и коэффициент мощности высокие. Обычно он приводит в действие насосы, вентиляторы и станки.
- Класс А пусковой момент такой же, как у класса B. Пусковой момент и пусковой ток (LRT) выше. Этот двигатель справляется с кратковременными перегрузками, которые встречаются в термопластавтоматах.
- Класс C (IEC класс H) имеет более высокий пусковой момент, чем классы A и B при LRT =200% от FLT. Этот двигатель применяется для тяжелых пусковых нагрузок, которые необходимо приводить в действие с постоянной скоростью, таких как конвейеры, дробилки, поршневые насосы и компрессоры.
- Класс D двигатели имеют самый высокий пусковой момент (LRT) в сочетании с низким пусковым током из-за высокого скольжения (от 5% до 13% при FLT). Высокое скольжение приводит к более низкой скорости. Регулировка скорости плохая. Тем не менее, двигатель отлично справляется с нагрузками с переменной скоростью, например с маховиком для аккумулирования энергии. Применения включают пробивные прессы, ножницы и подъемники.
- Класс E двигатели являются версией класса B с более высоким КПД.
- Класс F двигатели имеют гораздо более низкие LRC, LRT и крутящий момент, чем у класса B. Они работают с постоянными, легко запускаемыми нагрузками.
Коэффициент мощности асинхронных двигателей
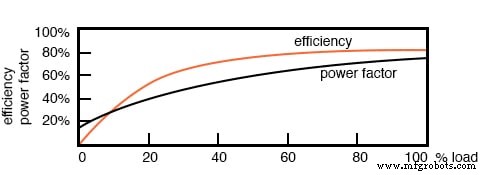
Асинхронные двигатели представляют собой отстающий (индуктивный) коэффициент мощности для линии электропередачи. Коэффициент мощности больших полностью нагруженных высокоскоростных двигателей может достигать 90% для больших высокоскоростных двигателей. При 3/4 полной нагрузки максимальный коэффициент мощности высокоскоростного двигателя может составлять 92%.
Коэффициент мощности малых тихоходных двигателей может составлять всего 50%. При запуске коэффициент мощности может находиться в диапазоне от 10% до 25%, увеличиваясь по мере достижения ротором скорости.
Коэффициент мощности (PF) значительно зависит от механической нагрузки двигателя (рисунок ниже). Ненагруженный двигатель аналогичен трансформатору без резистивной нагрузки на вторичной обмотке. Небольшое сопротивление отражается от вторичной обмотки (ротора) к первичной обмотке (статору).
Таким образом, в линии электропередачи присутствует реактивная нагрузка до 10% коэффициента мощности. По мере того, как ротор нагружен, возрастающая резистивная составляющая отражается от ротора к статору, увеличивая коэффициент мощности.
Коэффициент мощности и КПД асинхронного двигателя
КПД асинхронных двигателей
Большие трехфазные двигатели более эффективны, чем трехфазные двигатели меньшего размера, и почти все однофазные двигатели. КПД большого асинхронного двигателя может достигать 95% при полной нагрузке, хотя чаще встречается 90%.
Эффективность малонагруженного или ненагруженного асинхронного двигателя низкая, потому что большая часть тока связана с поддержанием намагничивающего потока. Когда нагрузка крутящего момента увеличивается, больше тока потребляется для создания крутящего момента, в то время как ток, связанный с намагничиванием, остается фиксированным. Эффективность при 75% FLT может быть немного выше, чем при 100% FLT.
Эффективность снижается на несколько процентов при FLT 50% и снижается еще на несколько процентов при FLT 25%. Эффективность становится низкой только ниже 25% FLT. Изменение эффективности в зависимости от нагрузки показано на рисунке выше.
Асинхронные двигатели обычно имеют завышенные размеры, чтобы гарантировать возможность запуска и привода их механической нагрузки в любых условиях эксплуатации. Если многофазный двигатель нагружен менее 75% номинального крутящего момента, когда КПД достигает пика, КПД снижается лишь незначительно до 25% FLT.
Корректор коэффициента мощности Nola
Франк Нола из НАСА предложил корректор коэффициента мощности (PFC) в качестве энергосберегающего устройства для однофазных асинхронных двигателей в конце 1970-х годов. Он основан на предположении, что асинхронный двигатель с неполной нагрузкой менее эффективен и имеет более низкий коэффициент мощности, чем двигатель с полной нагрузкой. Таким образом, можно сэкономить энергию в частично загруженных двигателях, в частности в двигателях 1-φ.
Энергия, потребляемая для поддержания магнитного поля статора, относительно фиксирована по отношению к изменениям нагрузки. Хотя в полностью загруженном двигателе экономить нечего, напряжение на частично загруженном двигателе может быть уменьшено, чтобы уменьшить энергию, необходимую для поддержания магнитного поля.
Это повысит коэффициент мощности и эффективность. Это была хорошая концепция для заведомо неэффективных однофазных двигателей, для которых она предназначалась.
Эта концепция не очень применима к большим 3-фазным двигателям. Из-за их высокого КПД (90% +) экономия энергии невелика. Более того, двигатель с КПД 95% по-прежнему имеет КПД 94% при 50% крутящем моменте при полной нагрузке (FLT) и 90% КПД при 25% FLT.
The potential energy savings in going from 100% FLT to 25% FLT is the difference in efficiency 95% - 90% =5%. This is not 5% of the full load wattage but 5% of the wattage at the reduced load. The Nola power factor corrector might be applicable to a 3-phase motor which idles most of the time (below 25% FLT), like a punch press.
The payback period for the expensive electronic controller has been estimated to be unattractive for most applications. Though, it might be economical as part of an electronic motor starter or speed Control.
Induction Motors as Alternators
An induction motor may function as an alternator if it is driven by a torque at greater than 100% of the synchronous speed (figure below). This corresponds to a few % of “negative” slip, say -1% slip.
This means that as we are rotating the motor faster than the synchronous speed, the rotor is advancing 1% faster than the stator rotating magnetic field. It normally lags by 1% in a motor. Since the rotor is cutting the stator magnetic field in the opposite direction (leading), the rotor induces a voltage into the stator feeding electrical energy back into the power line.
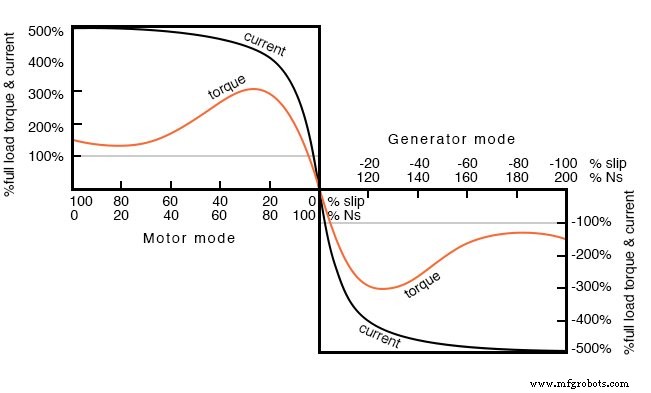
Negative torque makes induction motor into a generator
Such an induction generator must be excited by a “live” source of 50 or 60 Hz power. No power can be generated in the event of a power company power failure. This type of alternator appears to be unsuited as a standby power source.
As an auxiliary power wind turbine generator, it has the advantage of not requiring an automatic power failure disconnect switch to protect repair crews.
It is fail-safe.
Small remote (from the power grid) installations may be made self-exciting by placing capacitors in parallel with the stator phases. If the load is removed residual magnetism may generate a small amount of current flow.
This current is allowed to flow by the capacitors without dissipating power. As the generator is brought up to full speed, the current flow increases to supply a magnetizing current to the stator. The load may be applied at this point. Voltage regulation is poor. An induction motor may be converted to a self-excited generator by the addition of capacitors.
Startup procedure is to bring the wind turbine up to speed in motor mode by application of normal power line voltage to the stator. Any wind-induced turbine speed in excess of synchronous speed will develop negative torque, feeding power back into the power line, reversing the normal direction of the electric kilowatt-hour meter.
Whereas an induction motor presents a lagging power factor to the power line, an induction alternator presents a leading power factor. Induction generators are not widely used in conventional power plants.
The speed of the steam turbine drive is steady and controllable as required by synchronous alternators. Synchronous alternators are also more efficient.
The speed of a wind turbine is difficult to control and subject to wind speed variation by gusts. An induction alternator is better able to cope with these variations due to the inherent slip. This stresses the gear train and mechanical components less than a synchronous generator.
However, this allowable speed variation only amounts to about 1%. Thus, a direct line connected induction generator is considered to be fixed-speed in a wind turbine (See Doubly-fed induction generator for a true variable speed alternator).
Multiple generators or multiple windings on a common shaft may be switched to provide a high and low speed to accommodate variable wind conditions.
Motor Starting and Speed Control
Some induction motors can draw over 1000% of full load current during starting; though, a few hundred percents is more common. Small motors of a few kilowatts or smaller can be started by direct connection to the power line.
Starting large motors can cause line voltage sag, affecting other loads. Motor-start rated circuit breakers (analogous to slow blow fuses) should replace standard circuit breakers for starting motors of a few kilowatts. This breaker accepts high overcurrent for the duration of starting.
Autotransformer induction motor starter
Motors over 50 kW use motor starters to reduce line current from several hundred to a few hundred percents of full load current. An intermittent duty autotransformer may reduce the stator voltage for a fraction of a minute during the start interval, followed by application of full line voltage as in the figure above.
Closure of the S contacts applies reduced voltage during the start interval. The S contacts open and the R contacts close after starting. This reduces starting current to, say, 200% of full load current. Since the autotransformer is only used for the short start interval, it may be sized considerably smaller than a continuous-duty unit.
Running Three-Phase Motors on Single-Phase Provisions
Three-phase motors will run on single phase as readily as single-phase motors. The only problem for either motor is starting. Sometimes 3-phase motors are purchased for use on single-phase if three-phase provisioning is anticipated.
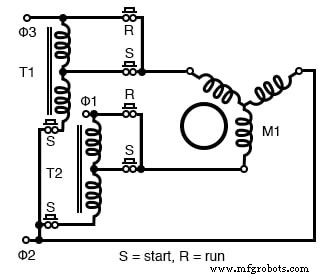
The power rating needs to be 50% larger than for a comparable single phase motor to make up for one unused winding. Single-phase is applied to a pair of windings simultaneous with a start capacitor in series with the third winding.
The start switch is opened in the figure below upon motor start. Sometimes a smaller capacitor than the start capacitor is retained while running.
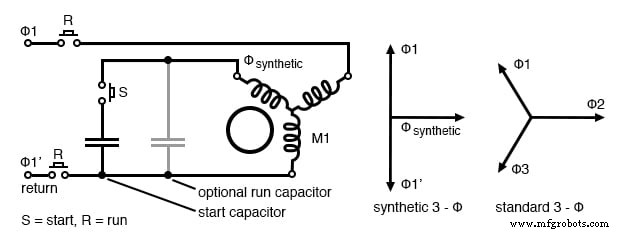
Starting a three-phase motor on single phase
The circuit in the figure above for running a three-phase motor on single phase is known as a static phase converter if the motor shaft is not loaded. Moreover, the motor acts as a 3-phase generator.
Three-phase power may be tapped off from the three stator windings for powering other 3-phase equipment. The capacitor supplies a synthetic phase approximately midway ∠90° between the ∠180° single-phase power source terminals for starting.
While running, the motor generates approximately standard 3-φ, as shown above. Matt Isserstedt shows a complete design for powering a home machine shop.
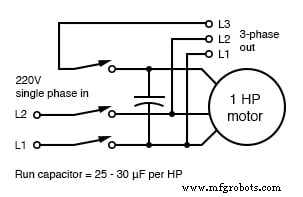
Self-starting static phase converter. Run capacitor =25-30µF per HP. Adapted from Figure 7, Hanrahan
Since a static phase converter has no torque load, it may be started with a capacitor considerably smaller than a normal start capacitor. If it is small enough, it may be left in the circuit as a run-capacitor (See the figure above).
However, smaller run-capacitors result in better 3-phase power output. Moreover, adjustment of these capacitors to equalize the currents as measured in the three phases results in the most efficient machine. However, a large start capacitor is required for about a second to quickly start the converter. Hanrahan provides construction details.
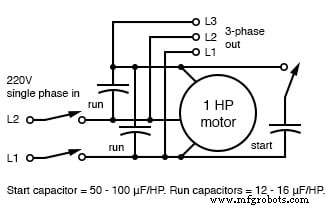
More efficient static phase converter. Start capacitor =50-100µF/HP. Run capacitors =12-16µF/HP. Adapted from Figure 1, Hanrahan
Induction Motors with Multiple Fields
Induction motors may contain multiple field windings, for example, a 4-pole and an 8-pole winding corresponding to 1800 and 900 rpm synchronous speeds. Energizing one field or the other is less complex than rewiring the stator coils.
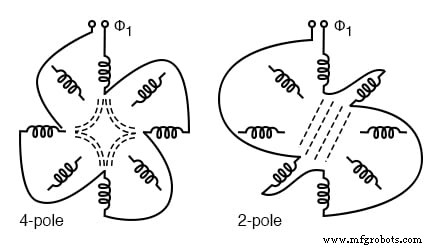
Multiple fields allow speed change
If the field is segmented with leads brought out, it may be rewired (or switched) from 4-pole to 2-pole as shown above for a 2-phase motor. The 22.5° segments are switchable to 45° segments. Only the wiring for one phase is shown above for clarity.
Thus, our induction motor may run at multiple speeds. When switching the above 60 Hz motor from 4 poles to 2 poles the synchronous speed increases from 1800 rpm to 3600 rpm.
В: If the motor is driven by 50 Hz, what would be the corresponding 4-pole and 2-pole synchronous speeds?
А:
Ns =120f/P =120*50/4 =1500 rpm (4-pole) Ns =3000 rpm (2-pole)
Induction Motors with Variable Voltage
The speed of small squirrel cage induction motors for applications such as driving fans may be changed by reducing the line voltage. This reduces the torque available to the load which reduces the speed (see figure below).
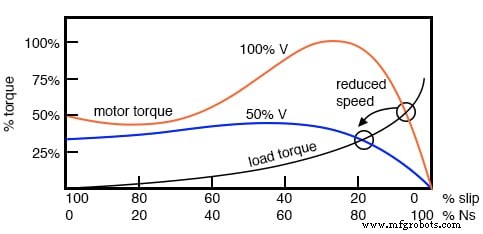
Variable voltage controls induction motor speed
Electronic Speed Control in Induction Motors
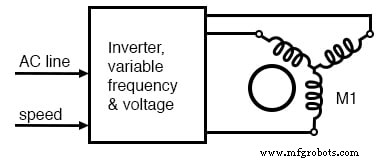
Modern solid-state electronics increase the options for speed control. By changing the 50 or 60 Hz line frequency to higher or lower values, the synchronous speed of the motor may be changed. However, decreasing the frequency of the current fed to the motor also decreases reactance XL which increases the stator current.
This may cause the stator magnetic circuit to saturate with disastrous results. In practice, the voltage to the motor needs to be decreased when the frequency is decreased.
Electronic variable speed drive
Conversely, the drive frequency may be increased to increase the synchronous speed of the motor. However, the voltage needs to be increased to overcome increasing reactance to keep current up to a normal value and maintain torque.
The inverter approximates sine waves to the motor with pulse width modulation outputs. This is a chopped waveform which is either on or off, high or low, the percentage of “on” time corresponds to the instantaneous sine wave voltage.
Once electronics is applied to induction motor control, many control methods are available, varying from the simple to complex:
- Scalar Control: Low-cost method described above to control only voltage and frequency, without feedback.
- Vector Control: Also known as a vector phase control. The flux and torque producing components of stator current are measured or estimated on a real-time basis to enhance the motor torque-speed curve. This is computation intensive.
- Direct Torque Control: An elaborate adaptive motor model allows more direct control of flux and torque without feedback. This method quickly responds to load changes.
Tesla Polyphase Induction Motors Summary
- A polyphase induction motor consists of a polyphase winding embedded in a laminated stator and a conductive squirrel-cage embedded in a laminated rotor.
- Three-phase currents flowing within the stator create a rotating magnetic field which induces a current and consequent magnetic field in the rotor. Rotor torque is developed as the rotor slips a little behind the rotating stator field.
- Unlike single-phase motors, polyphase induction motors are self-starting.
- Motor starters minimize loading of the power line while providing a larger starting torque than required during running. Line current reducing starters are only required for large motors.
- Three-phase motors will run on single phase if started.
- A static phase converter is a three-phase motor running on single phase having no shaft load, generating a 3-phase output.
- Multiple field windings can be rewired for multiple discrete motor speeds by changing the number of poles.
Linear Induction Motors
The wound stator and the squirrel cage rotor of an induction motor may be cut at the circumference and unrolled into a linear induction motor. The direction of linear travel is controlled by the sequence of the drive to the stator phases.
The linear induction motor has been proposed as a drive for high-speed passenger trains. Up to this point, the linear induction motor with the accompanying magnetic repulsion levitation system required for a smooth ride has been too costly for all but experimental installations.
However, the linear induction motor is scheduled to replace steam-driven catapult aircraft launch systems on the next generation of the naval aircraft carrier, CVNX-1, in 2013. This will increase efficiency and reduce maintenance.
СВЯЗАННЫЙ РАБОЧИЙ ЛИСТ:
- Рабочий лист по теории электродвигателей переменного тока
Промышленные технологии
- Асинхронный двигатель
- Однофазные асинхронные двигатели
- Коллекторные двигатели переменного тока
- Технический совет:двигатели
- Безопасность электродвигателя:различные фазы и меры безопасности
- 4 основных вида отказов обмотки в электродвигателях переменного тока
- О промышленных двигателях и приложениях
- Введение в двигатель BLDC
- 5 причин, по которым двигатели TEFC выходят из строя
- Правильное обслуживание двигателей компрессоров